吊艙平臺微電機轉子系統的分岔特性分析*
2019-09-09 09:24:54江樂果王一波胡百振孟祥福
飛控與探測 2019年4期
江樂果,王一波,焦 彤,胡百振,孟祥福
( 1.上海航天控制技術研究所·上海·201109; 2. 中國航天科技集團有限公司紅外探測技術研發中心·上海·201109)
0 引 言
在現代戰爭中,精確制導武器在局部戰爭中對于各國奪取主動權起到了至關重要的作用。由于在制導精度、靈敏度及抗干擾能力等方面的突出優點,紅外探測技術已經成為了國內外一個重要的研究方向,其中光電吊艙承擔著制導系統的關鍵作用。吊艙平臺隨動系統的作用是保持探測器的穩定,通過在視場內搜索、捕獲及跟蹤目標,為末段制導提供彈體的位姿信息。
在彈體主發動機工作過程中,高速彈旋制約著制導系統的探測性能,通過微電機轉子系統的消旋作用,為光學探測器提供可靠的工作平臺保障。當制導系統跟蹤目標時,紅外探測器將目標視線與光軸的偏差角信息提供給控制電路,從而產生相應的控制電流并輸送至力矩器。在力矩作用下,陀螺平臺轉子軸向目標方向進動,形成閉合回路,實現對目標的實時跟蹤。因此,微型電機轉子系統的穩定特性將影響到整個吊艙平臺的跟蹤性能,通過分析平臺的非線性動態特性,對彈體制導精度的提高有著十分重要的作用。
1 框架式穩定平臺的非線性動力學模型
吊艙平臺電機轉子系統通過一對滾動軸承支承轉子及穩定平臺,其構成了剛性轉子系統模型,吊艙平臺微電機轉子模型如圖1所示。在模型當中,需綜合考慮轉子組件的質量不平衡、滾動軸承的內部游隙等要素對系統的非線性影響。軸承外圈剛性固定支承在制導框架系統上,內圈與轉子軸固聯在一起,鋼球在套圈滾道間做純滾動。
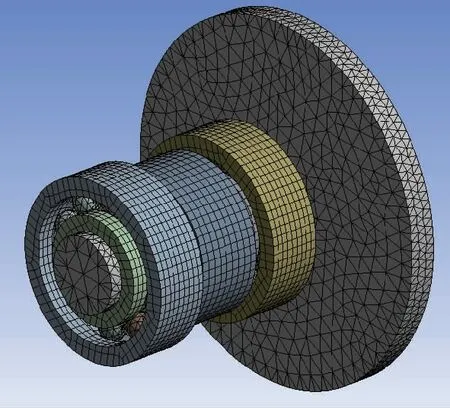
圖1 光電吊艙平臺微電機轉子系統模型圖Fig.1 Model diagram of micro-motor rotor system of optoelectronic pod platform
1.1 電機轉子軸承的非線性接觸力
由滾動軸承的運動學理論可知,假設滾動體通過保持架等距離分布在內、外圈滾道之間,并在滾道內做純滾動,如圖2所示。在忽略潤滑油膜影響的前提下,滾動體的中心角速度wcage=wrotorRi/(Ri+Re)。其中,wrotor為吊艙平臺的轉子角速度,吊艙平臺角速度可轉換為轉速nrotor,換算關系為:nrotor=wrotor/(2π);Re為外圈滾道半徑;Ri為內圈滾道半徑。
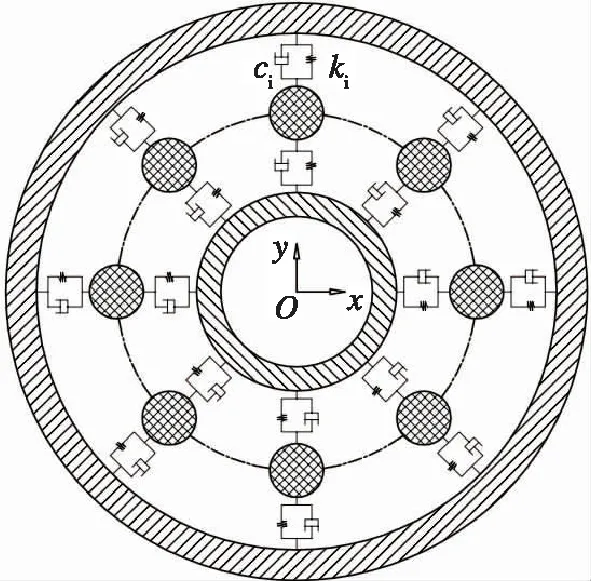
圖2 滾動軸承非線性接觸模型示意圖Fig.2 Schematic diagram of nonlinear contact model of rolling bearing
由Hertz 接觸理論可知,滾動體與內外滾道的局部彈性接觸力F與彈性接觸變形量相關,軸承的x和y方向上的接觸力分別為
(1)
式(1)中,Fx和Fy分別表示滾動體與滾道間的彈性恢復力在水平和垂直兩個方向上的分量,x和y分別表示軸承內圈質心點在水平方向和垂直方向上的位移,θi為第i個滾動體的方位角,Kc為球與滾道的接觸剛度,γ0表示軸承的徑向間隙。其中,(Δ)+表示括號內的值為非負,即當Δ≤0時,軸承中第i個滾動體未處于載荷區內,對應的滾動體與滾道間的彈性接觸變形為0。
根據Hertz接觸理論,點接觸類型的兩物體的接觸剛度可表示為
(2)
式(2)中,E為材料的彈性模量,μ為材料的泊松比,∑ρ為接觸點的曲率和,δ*為接觸變形系數。
因此,滾動體與滾道間的接觸剛度可表示為
(3)
式中,ke表示滾動體與外圈的接觸剛度,ki表示滾動體與內圈的接觸剛度。
第i個滾動體的方位角θi可表示為
建設綠色礦山、發展綠色礦業是礦業行業當前的必然選擇和唯一選擇,是礦業行業落實新發展理念的具體行動。建設綠色礦山,大力發展循環經濟,協調礦山資源環境之間的關系,是樹立起良好形象、實現轉型升級的重要方式。
(4)
其中,Nb為滾動體的個數,t為轉子運行時間。
光電吊艙微電機轉子系統的動力學方程為
Fr+Meewcage2cos(wcaget)
Meewcage2sin(wcaget)
(5)
式中,Me為轉子系統質量,C為轉子系統阻尼系數,Fr為作用在轉子上的恒定徑向載荷,e為轉子系統不平衡偏心距。
1.2 轉子非線性分岔與混沌理論
1.2.1 分岔
分岔是帶有參數的動力系統隨著參數的變化,做出的相應的定性行為和定量行為。
定義:考慮含有參數的常微分方程組
其中,J是開集,x是狀態變量,u是分岔參數。當u連續地變動,如果系統的定性行為發生突然變化,則系統在uo處將發生分岔,uo∈J。該系統的定性或定量行為隨參數u的變化而變化的圖形即為分岔圖。
1.2.2 混沌
混沌運動是一種不穩定有限定常運動,為全局壓縮和局部不穩定的運動。混沌的復雜性一般可通過時間歷程圖、相圖、龐加萊(Poincaré)截面法等特征表現出來,利用一定的理論方法可解析證明系統的混沌特性。
設∑?Rn是某一n-1維超曲面的一部分,若對于任意的x?∑,∑的法向量n(x)滿足與向量場f(x,u)的無切條件
nT(x)·f(x,u)≠0
則稱∑是向量場f(x,u)的Poincaré截面。可根據Poincaré截面的情況來判斷系統的運動特性,當截面上有一個不動點時,系統處于1周期運動;當截面上有n個不動點時,系統為n周期運動態;當Poincaré截面出現一封閉曲線時,系統為擬周期運動;當截面上為有界無窮的點集合時,系統為混沌態。
2 轉速對吊艙電機轉子系統的影響分析
根據文中1.1節的內容對轉子系統的非線性模型進行了分析,著重考慮了轉速對吊艙電機轉子系統的影響,探討出了不同轉速變化范圍下的轉子系統穩定性影響,從而在設計中可避免混沌分叉效應對吊艙平臺跟蹤精度及穩定性的影響。在滿足光電吊艙穩定平臺啟動力矩使用要求的前提下,以某型號微型電機球軸承為例進行了分析,其特征參數為:滾動體數Nb=8;外圈溝道半徑Re=2.25mm;內圈溝道半徑Ri=3.75mm;阻尼C=50.0Ns/m;徑向游隙γ0=5μm;吊艙平臺系統的質量Mplatform=0.15kg。
吊艙平臺的穩定性會隨著微型電機轉子系統的轉速而發生變化,從而影響到安裝在穩定平臺上的光電探測系統的跟蹤穩定性。在吊艙電機轉子系統承受的探測器平臺等的系統質量及等效阻尼確定的情況下,將電機控制轉子的轉速作為變量參數(取值范圍為:500r/min~15000r/min)可研究微型電機在從低速啟轉至高速轉動的過程中,系統的穩定響應狀態。通過對式(5)的動力學方程進行求解,可得到轉子系統的位移、速度等參數隨轉速變化的Poincaré 圖及分岔圖。圖3為框架平臺轉子系統的中心在x方向上的位移-轉速分岔圖,圖3給出了不同轉速下轉子中心的 Poincaré 圖和質心軌跡圖。
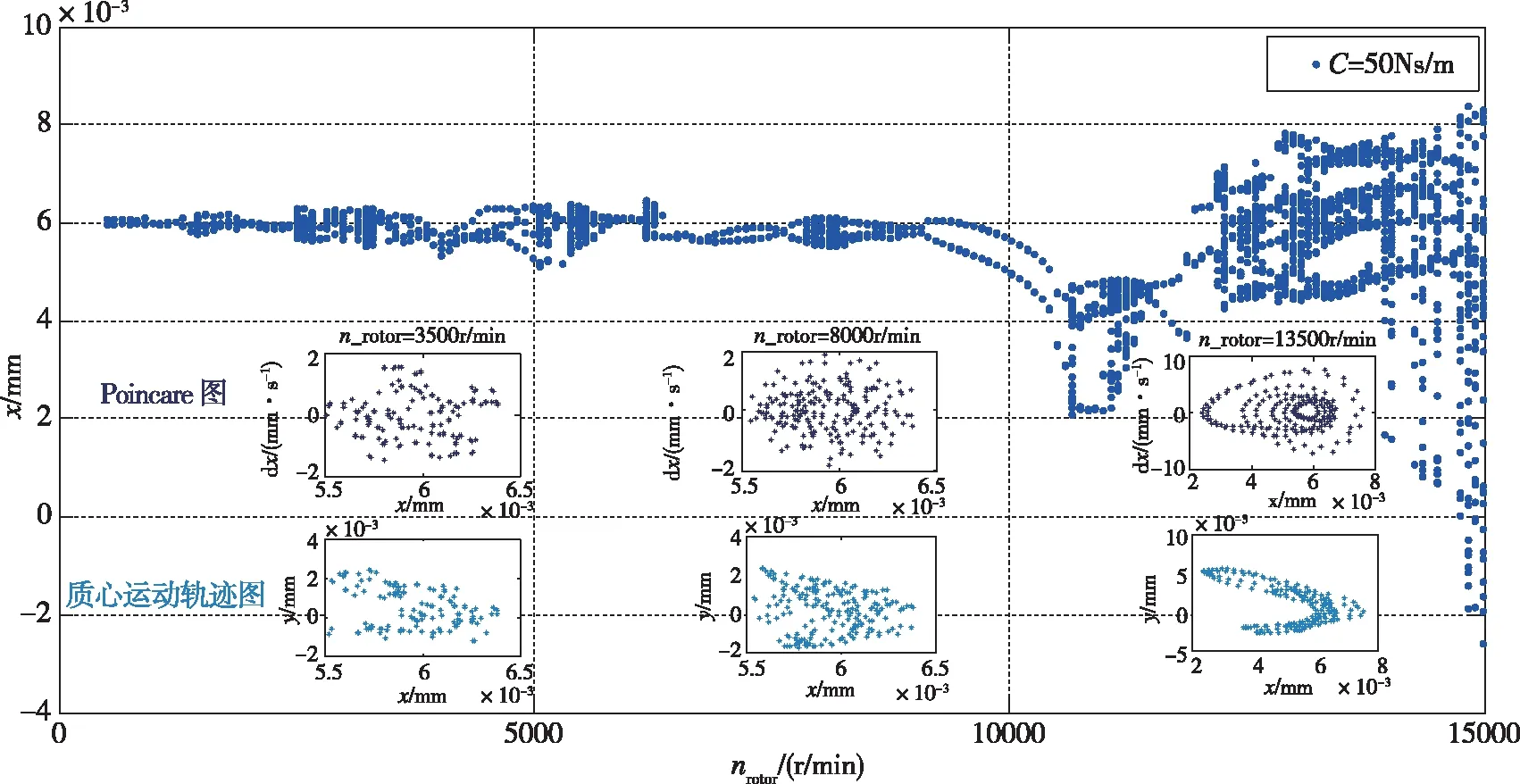
圖3 x方向上的位移轉速分岔圖Fig.3 The bifurcation diagram of displacement and rotational speed in the x direction
從圖3可見,在轉速變化過程中,吊艙平臺系統的運動十分復雜,系統經歷了多周期運動、擬周期和混沌態交替變化的過程。在500r/min≤nrotor≤2500r/min時,系統處于多周期運動狀態;在2500r/min≤nrotor≤6500r/min時,系統處于小范圍混沌態響應狀態;在7000r/min≤nrotor≤11000r/min時,系統進入到擬周期態;當11000r/min≤nrotor≤12500r/min時,系統進入到多周期態;當進一步提高轉速時,轉速12500r/min≤nrotor≤15000r/min時,系統進入多周期及混沌態交替混合區,對探測器對目標的穩定跟蹤造成了較大影響。
(a)當nrotor=3500r/min時,x方向上的Poincaré截面圖中的動點無規則分散在速率為±2000μm/s的小范圍內,轉子的質心軌跡在水平x和垂直y方向的跳動范圍分別為(-0.5μm,0.5μm)和(-1.5μm,2.5μm),表明系統處于多周期運動態。
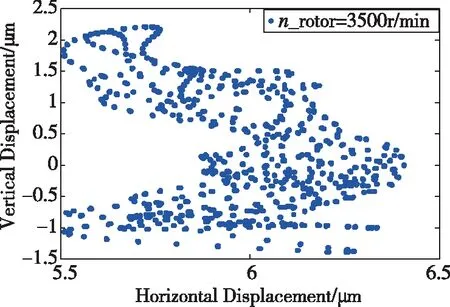
圖4 nrotor=3500r/min時的質心運動軌跡圖Fig.4 Centroid motion trajectory diagram at nrotor=3500r/min
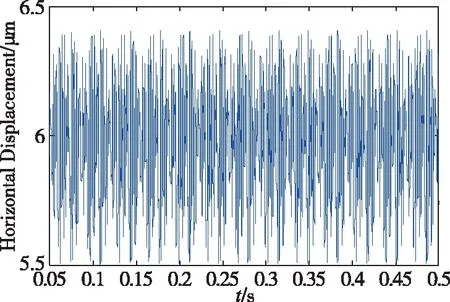
圖6 nrotor=3500r/min時的水平x方向時域圖Fig.6 Time-domain diagram in the x direction at nrotor=3500r/min
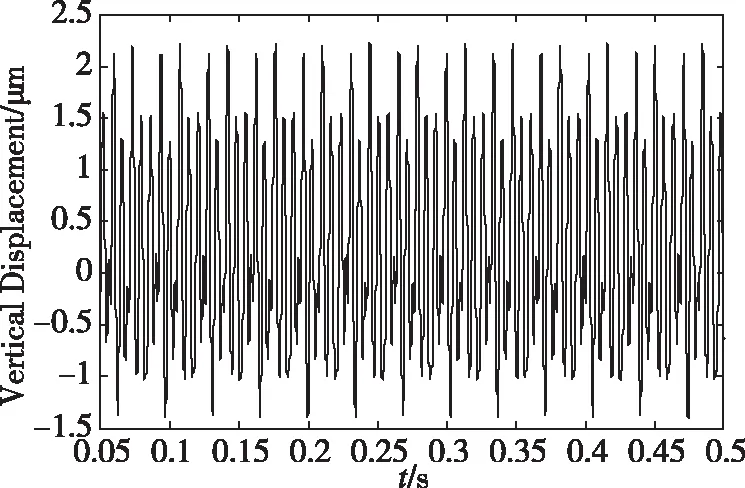
圖7 nrotor=3500r/min時的垂直y方向時域圖Fig.7 Time-domain diagram in the y direction at nrotor=3500r/min
(b)當轉子速度nrotor=8000r/min時,由Poincaré圖和質心軌跡圖可知,轉子質心在小范圍內運動。Poincaré圖的變化呈現出發散的趨勢,系統運動呈現出輕微向外發散的過程,系統處于窄范圍混沌態。

圖8 nrotor=8000r/min時的質心運動軌跡圖Fig.8 Centroid motion trajectory diagram at nrotor=8000r/min
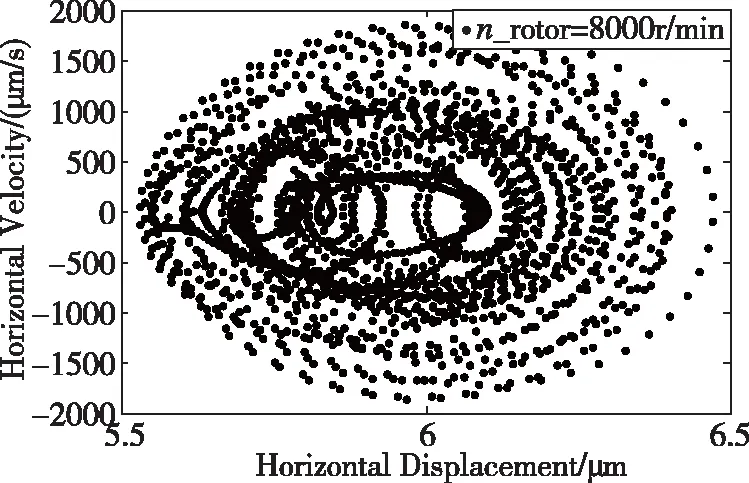
圖9 nrotor=8000r/min時的Poincaré圖Fig.9 Poincaré diagram at nrotor=8000r/min
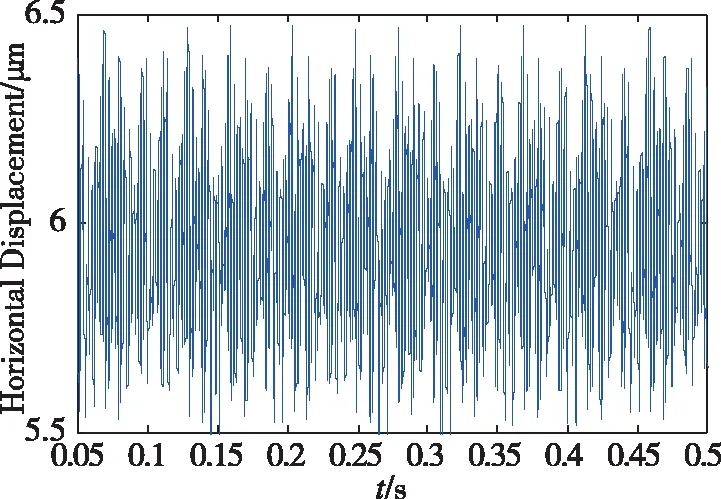
圖10 nrotor=8000r/min時的水平x方向時域圖Fig.10 Time-domain diagram in the x direction at nrotor=8000r/min
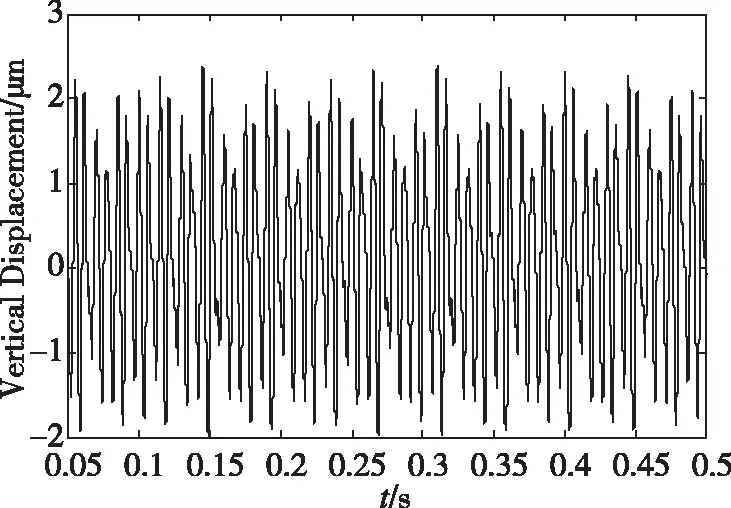
圖11 nrotor=8000r/min時的垂直y方向時域圖Fig.11 Time-domain diagram in the y direction at nrotor=8000r/min
(c)當轉速nrotor=13500r/min時,Poincaré圖形成了一個明晰的多重封閉曲線,這表明平臺轉子系統處于一個多周期狀態,轉子質心也做近似規則的運動。水平x和垂直y方向的時域圖表明系統長時間處于低幅值跳動狀態,在其余工作時間內有規則地跳動到較大幅值區域。
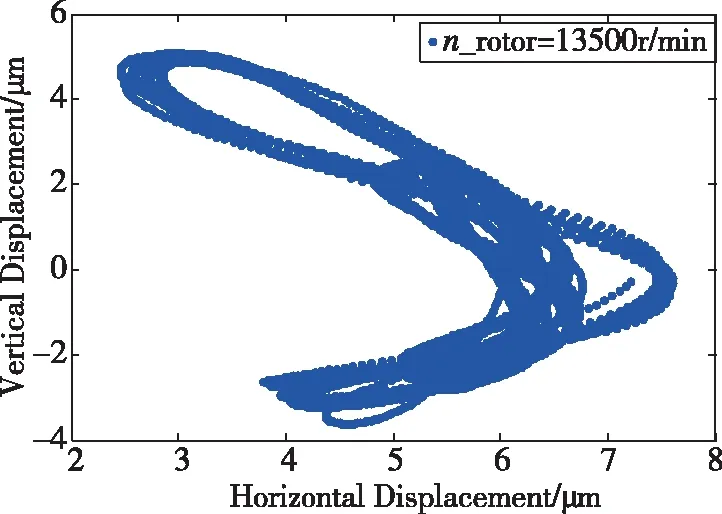
圖12 nrotor=13500r/min時的質心運動軌跡圖Fig.12 Centroid motion trajectory diagram at nrotor=13500r/min
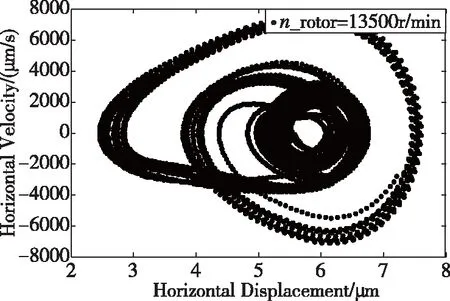
圖13 nrotor=13500r/min時的Poincaré圖Fig.13 Poincaré diagram at nrotor=13500r/min
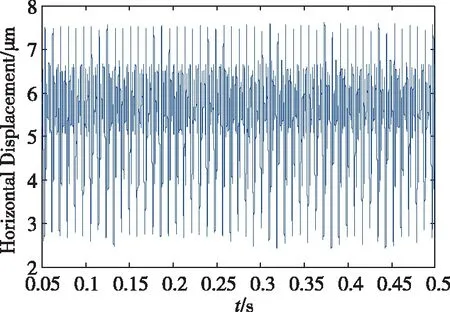
圖14 nrotor=13500r/min時的水平x方向時域圖Fig.14 Time-domain diagram in the x direction at nrotor=13500r/min

圖15 nrotor=13500r/min時的垂直y方向時域圖Fig.15 Time-domain diagram in the y direction at nrotor=13500r/min
3 結 論
隨著轉子轉速的變化,光電吊艙平臺電機轉子系統的響應可能會出現周期、擬周期、分岔和混沌的振動狀態。在轉子系統的動力學分析中,滾動軸承的接觸剛度、徑向游隙、不平衡質量和滾動體的個數等參數都會影響整個穩定平臺系統的非線性動態特性。在對紅外光電吊艙系統進行設計的過程中,需要充分考慮微型電機轉子系統的非線性分岔特性。通過調整軸承轉子的內部剛度特性,使轉子系統盡量避開混沌分岔工作的轉速范圍,進而可確保制導系統的探測精度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
