仿生光磁導(dǎo)航技術(shù)發(fā)展研究綜述*
2019-09-09 09:24:52趙慧俊劉曉晨郭肖亭
飛控與探測(cè) 2019年4期
關(guān)鍵詞:方法
劉 俊, 趙 菁, 趙慧俊, 劉曉晨, 郭肖亭, 唐 軍, 申 沖
(中北大學(xué) 儀器科學(xué)與動(dòng)態(tài)測(cè)試教育部重點(diǎn)實(shí)驗(yàn)室 儀器與電子學(xué)院·太原·030051)
0 引 言
從古時(shí)候看太陽(yáng)東升西落簡(jiǎn)單辨別方向,到如今精密的全球衛(wèi)星定位導(dǎo)航系統(tǒng)(Global Positioning System,GPS),人類(lèi)一直以來(lái)都對(duì)導(dǎo)航有很大的需求。仿生技術(shù)是建立在生物學(xué)、電子學(xué)、生物物理學(xué)、控制論、人機(jī)學(xué)、數(shù)學(xué)、心理學(xué)及自動(dòng)化技術(shù)基礎(chǔ)上的,利用電子學(xué)、機(jī)械技術(shù)研究生物結(jié)構(gòu),對(duì)能量轉(zhuǎn)換和信息流動(dòng)的過(guò)程進(jìn)行模擬,從而達(dá)到改善和創(chuàng)造嶄新的自動(dòng)控制裝置的目標(biāo)的技術(shù)。至此,作為一種新型導(dǎo)航技術(shù),仿生導(dǎo)航技術(shù)吸引了國(guó)內(nèi)外研究者的目光。
導(dǎo)航是一種為運(yùn)載體在航行時(shí)提供連續(xù)、安全和可靠服務(wù)的技術(shù),是一門(mén)涉及到計(jì)算機(jī)、微電子、數(shù)學(xué)、自動(dòng)控制、航空航天等眾多領(lǐng)域的交叉學(xué)科。導(dǎo)航可分為自主式導(dǎo)航和非自主式導(dǎo)航。所謂自主導(dǎo)航,就是運(yùn)動(dòng)體完全依靠所載的設(shè)備,自主地完成導(dǎo)航任務(wù),和外界不發(fā)生任何光、電聯(lián)系,否則則稱(chēng)為非自主導(dǎo)航。導(dǎo)航技術(shù)不僅在人們的日常生活中發(fā)揮了重要的作用,而且在軍事國(guó)防領(lǐng)域也占據(jù)著極其重要的地位,如在導(dǎo)彈制導(dǎo)、偵察等領(lǐng)域中可發(fā)揮重要作用。基于多種導(dǎo)航技術(shù)的組合導(dǎo)航系統(tǒng),也高度依賴(lài)衛(wèi)星信號(hào)。然而,這些導(dǎo)航系統(tǒng)易受外界干擾而無(wú)法正常工作,如人為損壞衛(wèi)星設(shè)施、人為電子對(duì)抗等。為此,人們開(kāi)始將目光轉(zhuǎn)向仿生導(dǎo)航,研究各種生物在日常行為中所使用的導(dǎo)航方法,尋找不易受到外界干擾的新型導(dǎo)航方法,由此即產(chǎn)生了仿生導(dǎo)航。
仿生導(dǎo)航是對(duì)自然界中某些生物如何利用某種環(huán)境或者利用何種自然特性實(shí)現(xiàn)導(dǎo)航而進(jìn)行研究的基礎(chǔ)上,通過(guò)模仿這些生物現(xiàn)象和原理并將之應(yīng)用于實(shí)際的一種新興技術(shù)。生物經(jīng)過(guò)長(zhǎng)期進(jìn)化,逐漸形成了與生長(zhǎng)環(huán)境相適應(yīng)的組織、結(jié)構(gòu)和生活方式,這為人類(lèi)的技術(shù)創(chuàng)新提供了想象空間和參考依據(jù)。
1 仿生光流導(dǎo)航
1.1 仿生光流導(dǎo)航的原理
在自然界中,蜜蜂在往返巢穴時(shí),是依靠飛行過(guò)程中感受到的視覺(jué)變化來(lái)進(jìn)行導(dǎo)航的。當(dāng)蜜蜂在自然界中飛行時(shí),自身相對(duì)于外部物體的運(yùn)動(dòng)會(huì)在其視網(wǎng)膜上產(chǎn)生圖像變化。這種圖像變化形成了所謂的“光流”信息,蜜蜂正是根據(jù)這種“光流”信息來(lái)執(zhí)行速度測(cè)量、著陸、姿態(tài)控制等各種導(dǎo)航任務(wù)。“光流”的概念是Gibson在1950年首先提出來(lái)的。它是空間運(yùn)動(dòng)物體在觀察成像平面上的像素運(yùn)動(dòng)的瞬時(shí)速度(如圖1所示),是利用圖像序列中像素在時(shí)間域上的變化及相鄰幀之間的相關(guān)性來(lái)找到上一幀圖像與當(dāng)前圖像之間存在的對(duì)應(yīng)關(guān)系,從而計(jì)算出相鄰幀圖像之間物體的運(yùn)動(dòng)信息的一種方法。“光流”信息除了可提供距離信息外,還可提供角度信息,其在目標(biāo)對(duì)象分割、識(shí)別、跟蹤、機(jī)器人導(dǎo)航及形狀信息恢復(fù)等方面均有著非常重要的應(yīng)用。

圖1 光流法顯示物體的瞬時(shí)速度Fig.1 Optical flow method shows the instantaneous velocity of an object
1.2 國(guó)內(nèi)外發(fā)展現(xiàn)狀
2000年, 德國(guó)的Neumann H等人[1]提出了一種基于光流的機(jī)器人導(dǎo)航方法,該方法能夠使機(jī)器人在非結(jié)構(gòu)化的環(huán)境中避開(kāi)障礙物并確定可以安全通過(guò)的自由空間。經(jīng)實(shí)驗(yàn)驗(yàn)證,該方法十分適合被應(yīng)用于導(dǎo)航任務(wù)中。2003年,Tautz J[2]提出了“蜜蜂的距離估計(jì)是基于飛行過(guò)程中所經(jīng)歷的光流積分”的觀點(diǎn)。2011年,韓國(guó)的Seung-Eun Yu[3]提出了一種全新的、基于地標(biāo)的機(jī)器人歸航導(dǎo)航匹配方法。與傳統(tǒng)的圖像匹配算法相比,新方法提高了準(zhǔn)確率。2014年,法國(guó)學(xué)者Roubieu等人[4]在真實(shí)的物理機(jī)器人上實(shí)現(xiàn)了“橫向光流調(diào)節(jié)自動(dòng)駕駛儀”。該駕駛儀由兩個(gè)相互交織的反饋回路組成(速度回路和橫向控制回路),每個(gè)回路都有自身的光流(Optical Flow,OF)設(shè)定點(diǎn)。結(jié)果表明,仿生機(jī)器人可以在走廊安全地進(jìn)行導(dǎo)航,并對(duì)干擾做出適當(dāng)反應(yīng)。實(shí)驗(yàn)證明,與傳統(tǒng)的圖像匹配算法相比,該方法從任意位置返回指定點(diǎn)的成功率更高。2015年,瑞典的Linander等人[5]研究了平移光流量的突然變化對(duì)大黃蜂的位置和速度控制的影響,找到了大黃蜂避障飛行的原因,為機(jī)器人避障導(dǎo)航提供了參考。2018年,Franceschini[6]根據(jù)蒼蠅的復(fù)眼結(jié)構(gòu),設(shè)計(jì)了光流導(dǎo)航的策略和傳感器,為工程師提供了應(yīng)用于智能自動(dòng)駕駛車(chē)輛等領(lǐng)域的新型裝置和機(jī)器。同年,墨西哥天體生物學(xué)研究所的Aguilar-Gonzalez Abiel[7]提出了一種像素/窗口并行方法,使用絕對(duì)差分和的相關(guān)函數(shù)來(lái)計(jì)算光流。此外,為了改善灰度梯度,Aguilar-Gonzalez Abie還提出了將灰度梯度的旋度作為預(yù)處理步驟的想法。實(shí)驗(yàn)證明,該算法提高了光流精度和處理速度。2018年5月,Pakpong Chirarattananon[8]提出了一種將光流與慣性測(cè)量單元相結(jié)合的方法,以估計(jì)無(wú)人駕駛飛行器(Unmanned Aerial Vehicle,UAV)的飛行高度。該直接使用通過(guò)圖像梯度評(píng)估光流信息的方法,簡(jiǎn)化了計(jì)算步驟。2018年6月,美國(guó)的Ashraf等人[9]針對(duì)當(dāng)前的導(dǎo)航系統(tǒng)高度依賴(lài)GPS的問(wèn)題,提出了一種基于卡爾曼濾波器的智能光流算法。針對(duì)傳統(tǒng)測(cè)量方法在計(jì)算過(guò)程中成本高且速度慢的問(wèn)題,提出了一種基于人工蜂群的塊匹配算法,提高了光流算法的實(shí)時(shí)性與精度。2019年,美國(guó)明尼蘇達(dá)大學(xué)的DoTien等人[10]介紹了一種自適應(yīng)光流算法。該算法通過(guò)逐步使用更多部分的圖像信息,在不利條件下(如當(dāng)在黑暗、無(wú)紋理地板上飛行時(shí))精確地估計(jì)了四旋翼飛行器的水平速度,提高了精確度。2019年,Boris Miller等人[11]通過(guò)光流估計(jì)了無(wú)人機(jī)的速度,精確確定了無(wú)人駕駛飛行器的高度,提高了準(zhǔn)確性。2019年,法國(guó)的Julien Dupeyroux等人[12]提出了一種螞蟻靈感導(dǎo)航方法。沙蟻根據(jù)大氣的偏振模式解算自身的航向信息,并根據(jù)步幅計(jì)數(shù)方法和光流信息來(lái)判斷行進(jìn)的距離。由螞蟻啟發(fā)的路徑積分(Path Integral,PI)策略可用于補(bǔ)充經(jīng)典光流技術(shù),具有高魯棒性和實(shí)時(shí)性的特點(diǎn)。2019年,加拿大的M. M Mostafa等人[13]介紹了一種智能混合視覺(jué)輔助慣性導(dǎo)航系統(tǒng)(Vision Aided Inertial Navigation System,VAINS)。該系統(tǒng)包括了全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System,GNSS)和慣性導(dǎo)航系統(tǒng)(Inertial Navigation System,INS)。該混合系統(tǒng)基于光流和回歸樹(shù)的單目視覺(jué)測(cè)距、高斯過(guò)程回歸(Gaussian Process Regression,GPR)和用于數(shù)據(jù)融合的擴(kuò)展卡爾曼濾波器(Extended Kalman Filtering,EKF),減小了累積的定位漂移誤差,提高了系統(tǒng)的可靠性。
2018年,北京航空航天大學(xué)的陳中原等人[14]將多個(gè)光流傳感器安裝在不同位置、不同觀察方向的微型飛行器上,對(duì)飛行器周?chē)墓饬鬟M(jìn)行了檢測(cè)。采用EKF對(duì)慣性和光流數(shù)據(jù)進(jìn)行了融合,來(lái)估計(jì)導(dǎo)航誤差,降低了由光流信息失鎖而引發(fā)的精度發(fā)散,提高了導(dǎo)航精度。同年,寧曉琳等人[15]提出了一種基于光流的角速度估計(jì)方法。與以前的方法不同,新方法只需要兩個(gè)連續(xù)圖像中的恒星坐標(biāo),消除了星形識(shí)別的過(guò)程,降低了計(jì)算的復(fù)雜度。同年7月,南京航空航天大學(xué)的楊盛偉等人提出了一種基于Mean-Shift算法的光流測(cè)速優(yōu)化方法。該方法可以有效減少干擾對(duì)無(wú)人機(jī)測(cè)速的影響[16]。同年9月,蘭州交通大學(xué)的曾幼涵等人針對(duì)慣性導(dǎo)航積分累積誤差大的問(wèn)題,提出了一種基于慣性和光流的融合算法[17]。該算法不需要外部輔助定位系統(tǒng),不需要已知飛行環(huán)境,不需要昂貴的傳感器,降低了傳統(tǒng)INS對(duì)GPS的依賴(lài)。同年9月,中國(guó)船舶重工集團(tuán)公司的周秀珍等人針對(duì)微型飛行器在定位過(guò)程中GPS信號(hào)無(wú)效且無(wú)已知地面合作目標(biāo)的情況,提出了一種導(dǎo)航算法。其新穎之處是采用了三層嵌入式卡爾曼濾波器結(jié)構(gòu)實(shí)時(shí)進(jìn)行光流計(jì)算及三維轉(zhuǎn)換,可以有效提高飛行器在室內(nèi)和室外飛行時(shí)的效率和魯棒性[18]。同年10月,太原工業(yè)學(xué)院的王瑞榮等人針對(duì)光照極弱或光流傳感器離地高度小于攝像頭焦距的情況,提出一種基于Elman神經(jīng)網(wǎng)絡(luò)的速度預(yù)測(cè)方法[19],提高了導(dǎo)航系統(tǒng)對(duì)環(huán)境的適應(yīng)性。同年11月,寧夏大學(xué)、長(zhǎng)春工業(yè)大學(xué)的郝志洋等人針對(duì)在室內(nèi)環(huán)境下GPS信號(hào)弱或無(wú)GPS信號(hào)的情況,提出了將改進(jìn)ORB算法與特征光流算法相結(jié)合來(lái)得到飛行器的光流信息數(shù)據(jù),并且將光流信息數(shù)據(jù)與飛行器的慣導(dǎo)數(shù)據(jù)相融合[20],提高了飛行器的姿態(tài)穩(wěn)定性。
1.3 發(fā)展趨勢(shì)
目前,仿生光流導(dǎo)航技術(shù)已經(jīng)在軍事、工業(yè)、建筑及醫(yī)學(xué)等領(lǐng)域獲得了廣泛的應(yīng)用。隨著系統(tǒng)集成技術(shù)的不斷發(fā)展,仿生光流導(dǎo)航模型正不斷趨于小型化、集成化。人類(lèi)對(duì)仿生技術(shù)的深入研究使應(yīng)用于該技術(shù)的生物特性的種類(lèi)會(huì)不斷擴(kuò)大,而這些都將會(huì)促進(jìn)仿生光流導(dǎo)航技術(shù)的發(fā)展。未來(lái),該技術(shù)將大量被應(yīng)用于各種智能機(jī)器人的設(shè)計(jì)與研發(fā)當(dāng)中,在國(guó)防、醫(yī)學(xué)制藥、食品檢驗(yàn)、工業(yè)等關(guān)系國(guó)計(jì)民生的領(lǐng)域中發(fā)揮突出的作用。雖然,目前仿生光流導(dǎo)航技術(shù)已經(jīng)取得了很大進(jìn)步,但其在穩(wěn)定性、再現(xiàn)性和精度等方面還存在很大缺陷。因此,未來(lái)需在鞏固現(xiàn)有技術(shù)的基礎(chǔ)上,不斷完善其性能。仿生光流導(dǎo)航技術(shù)的具體發(fā)展趨勢(shì)如圖2所示。
圖2 仿生光流導(dǎo)航技術(shù)的發(fā)展趨勢(shì)Fig.2 Development trend of bionic optical flow navigation technology
2 仿生偏振光導(dǎo)航
2.1 仿生偏振光的導(dǎo)航原理
由于大氣粒子的散射作用,太陽(yáng)光在經(jīng)過(guò)地球大氣層時(shí)產(chǎn)生了規(guī)律性分布的偏振態(tài),其能提供天空光的偏振度和偏振角信息,并呈現(xiàn)出了一系列時(shí)空連續(xù)分布特性。眾多研究表明基于這種特性,許多生物可以實(shí)現(xiàn)自主導(dǎo)航。T. Labhart和E. P. Meyer[21]經(jīng)過(guò)研究發(fā)現(xiàn),蟋蟀等昆蟲(chóng)復(fù)眼背部區(qū)域(Dorsal Rim Area,DRA)規(guī)則排列的特殊小眼結(jié)構(gòu)是其對(duì)天空偏振光敏感的基礎(chǔ),如圖3所示。DRA區(qū)域的感桿束短且寬(如圖3(a)所示),提高了對(duì)光強(qiáng)的接收率。即使在光線(xiàn)較暗時(shí),復(fù)眼仍具有較高的靈敏度。這些昆蟲(chóng)還具有三類(lèi)偏振對(duì)立神經(jīng)元(Polarization-Opponent neurons,POL-OP),如圖3(b)、圖3(c)所示,其對(duì)偏振光的響應(yīng)隨體軸與太陽(yáng)子午線(xiàn)方向夾角的不同而呈正弦曲線(xiàn)變化。當(dāng)夾角為10°、60°和130°時(shí),對(duì)偏振的響應(yīng)最大。蟋蟀通過(guò)對(duì)三類(lèi)輸出信號(hào)進(jìn)行綜合解譯,進(jìn)而得到導(dǎo)航信息。
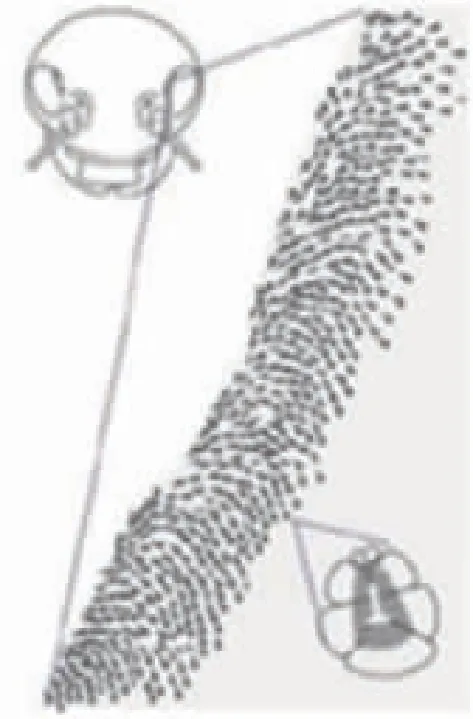
(a)DRA區(qū)域視神經(jīng)感桿
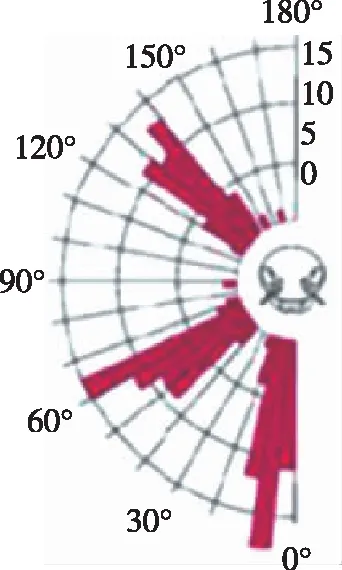
(b)POL-OP的響應(yīng)
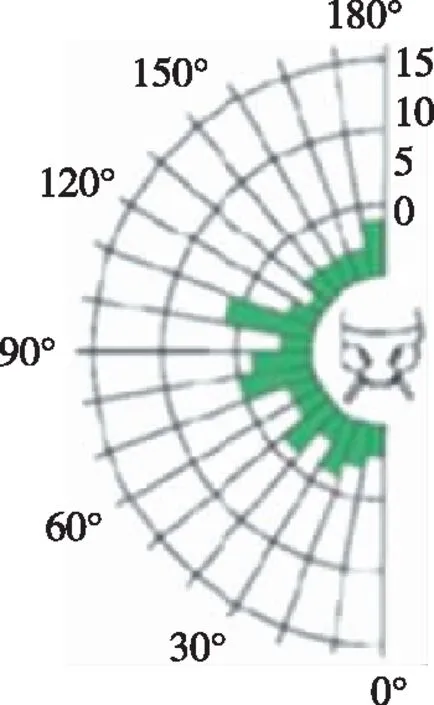
(c)中心復(fù)雜神經(jīng)元的功能
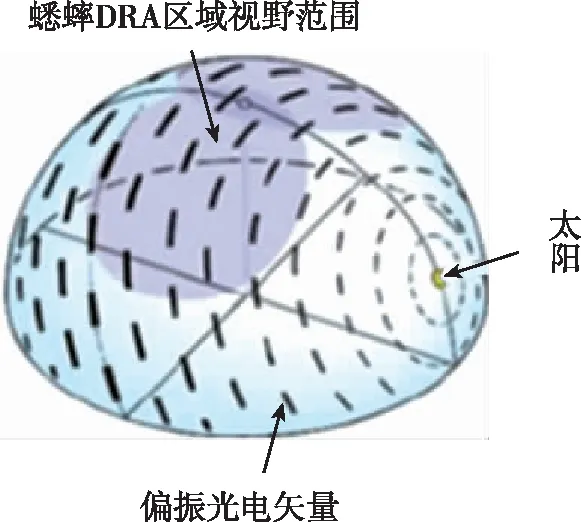
(d)晴朗天空偏振光分布模式示意圖及 蟋蟀DRA區(qū)域視野范圍圖3 蟋蟀的偏振敏感機(jī)理Fig.3 Polarization-sensitivive mechanism of crickets
2.2 仿生偏振光導(dǎo)航的國(guó)內(nèi)外研究現(xiàn)狀
在國(guó)外,有關(guān)偏振光導(dǎo)航的研究可以追溯到19世紀(jì)初。法國(guó)學(xué)者Arago首先發(fā)現(xiàn)了天空光的偏振現(xiàn)象[22]。1982年,瑞士蘇黎世大學(xué)的Wehner提出了描述天空偏振光分布模式的Rayleigh模型[23],之后該模型成為了現(xiàn)有大氣偏振模式中被應(yīng)用得最為廣泛的理論模型。2000年,蘇黎世大學(xué)的Dimitrios Lambrinos等人根據(jù)沙蟻的導(dǎo)航機(jī)理設(shè)計(jì)了偏振傳感器,它可以利用檢測(cè)到的天空偏振信息實(shí)現(xiàn)二維導(dǎo)航定向,并且成功地完成了導(dǎo)航實(shí)驗(yàn)[24]。澳大利亞學(xué)者Javan Chahl將偏振傳感器搭載在飛行器上進(jìn)行了相關(guān)實(shí)驗(yàn),實(shí)現(xiàn)了飛行體的導(dǎo)航與穩(wěn)定控制,打開(kāi)了無(wú)人機(jī)導(dǎo)航的新途徑[25]。2018年9月,加州理工學(xué)院的Giraldo Ysabel Milton等人發(fā)現(xiàn)果蠅的E-PG神經(jīng)元可作為內(nèi)部羅盤(pán),并且通過(guò)實(shí)驗(yàn)發(fā)現(xiàn)E-PG神經(jīng)元可以跟蹤太陽(yáng)從而進(jìn)行導(dǎo)航[26]。同年,伊利諾斯大學(xué)的Missael Garcia等人提出了一種基于螳螂蝦視覺(jué)系統(tǒng)的高動(dòng)態(tài)范圍偏振成像傳感器,實(shí)現(xiàn)了140dB的動(dòng)態(tài)范圍和61dB的最大信噪比[27]。之后,來(lái)自昆士蘭大學(xué)的Samuel B.Powell等人提出了利用水下偏振模式進(jìn)行地理定位。他們使用仿螳螂蝦的水下偏振相機(jī)進(jìn)行了測(cè)試,地理定位平均精度達(dá)到了6m/1km[28]。2019年1月,艾克斯-馬賽大學(xué)的Julien Dupeyroux等人根據(jù)沙漠螞蟻復(fù)眼的啟發(fā)設(shè)計(jì)了一種2像素的偏振視覺(jué)傳感器,其在紫外波段具有特殊的靈敏度,性能優(yōu)異[29]。
國(guó)內(nèi)對(duì)于大氣偏振光仿生導(dǎo)航的研究起步相對(duì)較晚,但是同樣取得了很多成果。合肥工業(yè)大學(xué)的高雋課題組從2003年開(kāi)始了仿沙蟻的偏振光導(dǎo)航研究,在大氣偏振光分布特性及其相關(guān)理論、大氣偏振信息獲取及其導(dǎo)航應(yīng)用等領(lǐng)域開(kāi)展了大量的研究工作[30]。2005年,大連理工大學(xué)的褚金奎課題組開(kāi)始對(duì)基于瑞利散射理論的大氣偏振模式的理論仿真及其導(dǎo)航應(yīng)用開(kāi)展研究,提出了一種基于最小二乘支持向量機(jī)的航向角誤差補(bǔ)償算法[31],之后又研制出了許多微型化的偏振傳感器[32-33],還設(shè)計(jì)出了偏振光實(shí)時(shí)定位系統(tǒng)[34]。實(shí)驗(yàn)證明,該系統(tǒng)滿(mǎn)足了實(shí)時(shí)性和精度方面的需求,可被應(yīng)用于實(shí)際定位。
哈爾濱工業(yè)大學(xué)的盧鴻謙等人將偏振光定姿定向加入到了組合導(dǎo)航之中,提出了基于多個(gè)偏振探測(cè)單元的太陽(yáng)矢量敏感裝置和太陽(yáng)矢量估計(jì)算法[35],提高了系統(tǒng)的可靠性和精確性。中國(guó)科技大學(xué)通過(guò)與中科院先進(jìn)制造所合作,將研制的成像式偏振光導(dǎo)航傳感器應(yīng)用到了汽車(chē)導(dǎo)航系統(tǒng),并且獲得了與慣性導(dǎo)航、GNSS一致的導(dǎo)航精度[36]。中北大學(xué)劉俊課題組提出了一種基于全天域大氣偏振模式的姿態(tài)計(jì)算方法[37],實(shí)驗(yàn)證明該算法具有較高的精度。2018年10月,北京航空航天大學(xué)的趙慧潔等人研究了不同天空條件下的大氣偏振模式,提出了一種利用偏振角(Angle of Polarization,AOP)的對(duì)稱(chēng)性求出太陽(yáng)子午線(xiàn)的導(dǎo)航方法[38],提高了系統(tǒng)的魯棒性。2019年,西北工業(yè)大學(xué)的周軍等人提出了一種基于天空偏振光傳感器和磁力計(jì)的姿態(tài)確定方法,推導(dǎo)了偏振傳感器和三軸磁強(qiáng)計(jì)的測(cè)量模型,最終以衛(wèi)星姿態(tài)方程為狀態(tài)方程,提出了一種用于計(jì)算衛(wèi)星姿態(tài)的卡爾曼濾波器[39],并通過(guò)實(shí)驗(yàn)驗(yàn)證了其估計(jì)衛(wèi)星姿態(tài)信息的可行性。同年2月,大連理工大學(xué)的關(guān)樂(lè)等人提出了一種基于極坐標(biāo)變換的全偏振信息提取方法,提高了偏振角的精度[40]。國(guó)防科技大學(xué)的張文靜等利用Sony最新的IMX250-MZR微偏振陣列芯片,實(shí)現(xiàn)了60FPS以上的實(shí)時(shí)天空偏振模式測(cè)量。經(jīng)過(guò)實(shí)驗(yàn)測(cè)試,其航向角獲取精度超過(guò)了0.1(°)[41]。
2.3 發(fā)展現(xiàn)狀
目前,仿生偏振光導(dǎo)航在器件方面,主要朝著微型化、集成化的方向發(fā)展。Sony公司目前研制出了像素化的偏振CMOS傳感器,在傳感器的光電二極管上集成了一層偏振片,四個(gè)不同偏振角度的偏振片分別置于單個(gè)像元上,將每四個(gè)像元作為一個(gè)計(jì)算單元。同時(shí),仿生偏振光導(dǎo)航在算法方面,還有待進(jìn)一步完善,通過(guò)改進(jìn)算法可以進(jìn)一步提升導(dǎo)航的自主性及精度(如圖4所示)。
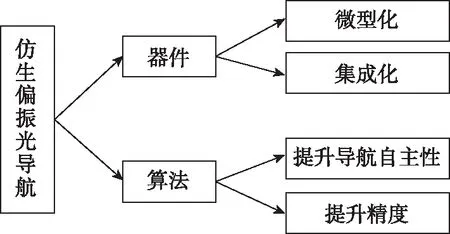
圖4 仿生偏振光導(dǎo)航發(fā)展趨勢(shì)Fig.4 Bionic polarized light navigation development trend
3 仿生類(lèi)腦導(dǎo)航
3.1 仿生類(lèi)腦導(dǎo)航原理
人類(lèi)在很早的時(shí)候就發(fā)現(xiàn)某些動(dòng)物具有辨別方向的能力,即便是在極其惡劣的環(huán)境中,它們也能完成準(zhǔn)確高效的道路導(dǎo)航,俗話(huà)說(shuō)的“老馬識(shí)途”就是最真實(shí)的寫(xiě)照。研究者們根據(jù)生物(如螞蟻、蜜蜂、鼠類(lèi)等)擁有的大腦定位功能進(jìn)行了一系列仿生類(lèi)腦導(dǎo)航研究。科學(xué)家莫澤夫婦和約翰·奧基夫分別于1971年和2005年發(fā)現(xiàn)了大腦中的兩種神經(jīng)細(xì)胞——位置細(xì)胞和網(wǎng)格細(xì)胞,如圖5所示。這兩類(lèi)細(xì)胞有機(jī)地構(gòu)成了大腦的定位系統(tǒng),前者在腦中形成所處地點(diǎn)的地圖,后者形成幫助大腦進(jìn)行精確定位和導(dǎo)航的坐標(biāo)系統(tǒng)。1984年James Ranck等人發(fā)現(xiàn)的頭方向細(xì)胞、2008年研究人員發(fā)現(xiàn)的邊界細(xì)胞以及2015年莫澤夫婦發(fā)現(xiàn)的速度細(xì)胞,均起到了輔助導(dǎo)航的作用。其中,頭方向細(xì)胞能夠辨別生物頭部的朝向,邊界細(xì)胞可以計(jì)算生物到達(dá)墻壁等邊界的距離,速度細(xì)胞在生物腦中充當(dāng)了“速度計(jì)”的角色,用于判斷生物在某一時(shí)刻的移動(dòng)速度。

圖5 神經(jīng)網(wǎng)絡(luò)Fig.5 Neural networks
3.2 國(guó)內(nèi)外研究現(xiàn)狀
2008年,中南工業(yè)大學(xué)的學(xué)者針對(duì)動(dòng)態(tài)避障問(wèn)題,提出了一種基于無(wú)線(xiàn)傳感器網(wǎng)絡(luò)(Wireless Sensor Network,WSN)與蟻群算法的新算法。實(shí)驗(yàn)證明,該算法在多動(dòng)態(tài)障礙物的實(shí)時(shí)環(huán)境下提高了傳統(tǒng)遺傳算法的整體性能[42]。2009年,南京航空航天大學(xué)俞曉磊等人根據(jù)受到外部刺激的兔子觀察到的嗅球神經(jīng)活動(dòng),提出了一種基于感知-動(dòng)作仿生學(xué)的新型無(wú)人機(jī)導(dǎo)航多感知統(tǒng)一反應(yīng)機(jī)制[43],提高了無(wú)人機(jī)的自主導(dǎo)航能力。2013年,吉林大學(xué)的孫超提出了一種實(shí)現(xiàn)生物機(jī)器人自動(dòng)導(dǎo)航的新方法。該方法采用廣義回歸神經(jīng)網(wǎng)絡(luò)(Generalized Regression Neural Network,GRNN)[44],對(duì)人體操作的控制過(guò)程進(jìn)行了分析和建模。實(shí)驗(yàn)證明,該方法可成功地控制生物機(jī)器人精確地進(jìn)行路徑導(dǎo)航。2013年,吉林大學(xué)的李穎提出了一種基于仿生優(yōu)化算法的降維方法——蟻群優(yōu)化選擇(Ant Colony Optimization Selection, ACO-S)法,以用于高維數(shù)據(jù)集[45]。實(shí)驗(yàn)結(jié)果證明,該方法是一種可應(yīng)用于移動(dòng)機(jī)器人導(dǎo)航的有效工具。2014年,上海大學(xué)制造業(yè)自動(dòng)化與機(jī)器人重點(diǎn)實(shí)驗(yàn)室提出了一種基于神經(jīng)行為學(xué)原理的移動(dòng)機(jī)器人仿生導(dǎo)航算法[46],其包括了用于環(huán)境感知的生物天線(xiàn)模型和用于運(yùn)動(dòng)規(guī)劃和控制的改進(jìn)算法,減少了計(jì)算負(fù)擔(dān)。2015年,國(guó)防科技大學(xué)機(jī)電工程與自動(dòng)化學(xué)院的張瀟等人在傳統(tǒng)鼠類(lèi)導(dǎo)航模型(Rat Simultaneous Localization and Mapping,Rat-SLAM)的基礎(chǔ)上引入了光學(xué)雙軸速度傳感器和微慣性測(cè)量單元(Micro Inertial and Measurement Unit,MIMU)[47],其環(huán)境適應(yīng)性和精度均得到了提高。同年,浙江大學(xué)的田莉雯等人實(shí)現(xiàn)了一種分別從頂部攝像頭和鼠載攝像頭兩個(gè)角度設(shè)計(jì)的大鼠自動(dòng)導(dǎo)航系統(tǒng)[48],成功模擬了GPS導(dǎo)航系統(tǒng),提高了系統(tǒng)的可行性。2016年,北京工業(yè)大學(xué)的李倜構(gòu)建了基于大鼠海馬結(jié)構(gòu)(生物進(jìn)行空間認(rèn)知的核心腦區(qū))的神經(jīng)網(wǎng)絡(luò)模型,并將此模型應(yīng)用于快速準(zhǔn)確的認(rèn)知地圖構(gòu)建[49]。實(shí)驗(yàn)證明,機(jī)器人能夠快速準(zhǔn)確地進(jìn)行導(dǎo)航。同年,空軍工程大學(xué)信息與導(dǎo)航學(xué)院的周陽(yáng)等人指出,自由移動(dòng)的嚙齒動(dòng)物大腦中的頭方向細(xì)胞(Head Direction Cells,HDC)和網(wǎng)格細(xì)胞(Grid Cells,GC)分別與移動(dòng)方向和距離有關(guān),這些細(xì)胞在嚙齒動(dòng)物的路徑整合中起到了重要作用[50]。他提出了基于HDC和GC特性的、由生物學(xué)啟發(fā)的路徑集成模型,并驗(yàn)證了模型的有效性和穩(wěn)定性。2017年,廈門(mén)大學(xué)智能類(lèi)腦系統(tǒng)重點(diǎn)實(shí)驗(yàn)室提出了一種基于模糊關(guān)聯(lián)BK積分的仿生機(jī)器魚(yú)路徑規(guī)劃方法[51],并通過(guò)實(shí)驗(yàn)驗(yàn)證了該方法的有效性。同年,安徽工程大學(xué)電氣傳動(dòng)與控制重點(diǎn)實(shí)驗(yàn)室的許曈等人針對(duì)自組織映射(Self-Organizing Map,SOM)神經(jīng)網(wǎng)絡(luò)仿生優(yōu)化方法實(shí)時(shí)性不佳的問(wèn)題,提出了一種可降低系統(tǒng)復(fù)雜度的動(dòng)態(tài)增長(zhǎng)自組織映射(Dynamic Growing Self-Organizing Map,DGSOM)神經(jīng)網(wǎng)絡(luò)算法,并將其與Rat-SLAM模型進(jìn)行了融合[52],以更快地實(shí)現(xiàn)閉環(huán)檢測(cè),使系統(tǒng)具有良好的實(shí)時(shí)性。同年,電子科技大學(xué)的彭杰鋼等人根據(jù)弱電魚(yú)具有的主動(dòng)電子定位功能提出了三種定位算法,其中包括交叉定位算法、隨機(jī)定位算法與頻域粒子群優(yōu)化定位算法[53],實(shí)現(xiàn)了黑暗環(huán)境下水下定位系統(tǒng)的任務(wù)。同年,四川大學(xué)的唐華錦等人通過(guò)分別實(shí)現(xiàn)海馬體和內(nèi)嗅皮質(zhì)的認(rèn)知記憶和映射功能,開(kāi)發(fā)了一個(gè)神經(jīng)生物學(xué)啟發(fā)系統(tǒng)[54],使移動(dòng)機(jī)器人能夠在迷宮環(huán)境中執(zhí)行基于任務(wù)的導(dǎo)航。2018年,安徽工程大學(xué)的陳孟元針對(duì)在復(fù)雜的室內(nèi)場(chǎng)景中、傳統(tǒng)鼠類(lèi)導(dǎo)航模型(Rat-SLAM)因光線(xiàn)變化或其他因素而導(dǎo)致的算法性能降低的問(wèn)題,提出了構(gòu)建一種基于多細(xì)胞導(dǎo)航機(jī)制的BVGSP-SLAM模型,將RTAB-Map閉環(huán)檢測(cè)策略引入到了Rat-SLAM系統(tǒng)[55],提高了系統(tǒng)的準(zhǔn)確度。同年9月,大連理工大學(xué)的關(guān)樂(lè)等人受到弱電魚(yú)在檢測(cè)和識(shí)別物體方面的卓越性能的啟發(fā),設(shè)計(jì)了可以解決類(lèi)似遠(yuǎn)程物體感知問(wèn)題的技術(shù)傳感器系統(tǒng)。通過(guò)構(gòu)建在導(dǎo)電介質(zhì)(水或電離氣體)中可產(chǎn)生電流脈沖并同時(shí)可感測(cè)局部電流密度的設(shè)備,將有源電子定位原理應(yīng)用于系統(tǒng)中,實(shí)現(xiàn)了遠(yuǎn)程物體的高精度感知[56]。同年,國(guó)防科技大學(xué)的鄭賢德等人注意到魚(yú)類(lèi)可以利用側(cè)線(xiàn)器官感知周?chē)牧鲌?chǎng)并由此實(shí)現(xiàn)導(dǎo)航,進(jìn)食和避開(kāi)捕食者、障礙物[57],這為新型水下探測(cè)技術(shù)的發(fā)展提供了重要參考。應(yīng)用由9個(gè)水下壓力傳感器組成的人造側(cè)線(xiàn),形成了十字形傳感器陣列,提高了導(dǎo)航性能。2019年,中北大學(xué)課題組針對(duì)衛(wèi)星信號(hào)中斷條件下的INS誤差累積問(wèn)題,提出了一種基于海馬導(dǎo)航細(xì)胞模型的類(lèi)腦導(dǎo)航方法。通過(guò)類(lèi)腦導(dǎo)航模型的校正,降低了INS的累積誤差,提高了導(dǎo)航精度[58]。
2017年,奧地利學(xué)者Hartbauer Manfred等人[59]通過(guò)研究蝗蟲(chóng)的“碰撞探測(cè)器神經(jīng)元”開(kāi)發(fā)了一種簡(jiǎn)單的算法,來(lái)重現(xiàn)在目標(biāo)逼近期間的神經(jīng)元響應(yīng),并設(shè)計(jì)了一個(gè)簡(jiǎn)單的車(chē)輛碰撞檢測(cè)系統(tǒng),提高了處理速度。2018年7月,印度國(guó)家技術(shù)研究所的Sahu C等人[60]修改了蟻群優(yōu)化技術(shù)的基本參數(shù),以增強(qiáng)對(duì)自適應(yīng)蟻群優(yōu)化的控制,并設(shè)計(jì)和開(kāi)發(fā)了一種新型導(dǎo)航控制器,提高了算法效率。2019年,Oyvind Arne Hoydal等人[61]指出海馬體和內(nèi)側(cè)內(nèi)嗅皮質(zhì)是大腦系統(tǒng)的一部分。在導(dǎo)航過(guò)程中,它們可以在近端環(huán)境中繪制自定位地圖。同年,Francesco Savelli[62]得到了嚙齒動(dòng)物的路徑整合與位置細(xì)胞和其他空間細(xì)胞的基本屬性密切相關(guān)的結(jié)論,探討了機(jī)器人如何在不熟悉的領(lǐng)域進(jìn)行地圖構(gòu)建和路徑整合。
3.3 發(fā)展趨勢(shì)
縱觀仿生類(lèi)腦導(dǎo)航技術(shù)的發(fā)展現(xiàn)狀,其研究方向雖然多種多樣,但總體上仍處于初級(jí)階段,許多問(wèn)題還值得探討和進(jìn)一步解決。如何在復(fù)雜的環(huán)境(如室內(nèi)外光線(xiàn)變化、突發(fā)障礙物等因素)下完成快速準(zhǔn)確的導(dǎo)航,以及如何減少長(zhǎng)時(shí)間導(dǎo)航產(chǎn)生的誤差,是亟待解決的問(wèn)題。可以說(shuō),將來(lái)仿生類(lèi)腦導(dǎo)航不僅能夠在人們的日常生活中發(fā)揮重要作用,也將在軍事國(guó)防領(lǐng)域占據(jù)重要地位。借鑒生物模型完成空中及水下導(dǎo)航,也是未來(lái)發(fā)展的重要方向。
4 仿生地磁導(dǎo)航
4.1 仿生地磁導(dǎo)航原理
地磁場(chǎng)是地球上非常重要的物理場(chǎng),它包含十分豐富的參數(shù)信息。許多研究表明,很多生物都可以利用地磁場(chǎng)進(jìn)行定位和導(dǎo)航[63]。地球的外核中富含鐵流體,這些流體的運(yùn)動(dòng)形成了地磁場(chǎng)。它是一種矢量場(chǎng),如圖6所示。磁力線(xiàn)環(huán)繞地球時(shí)產(chǎn)生的磁傾角、磁偏角以及不同磁緯度對(duì)應(yīng)的磁場(chǎng)強(qiáng)度,構(gòu)成了地磁場(chǎng)三要素[64]。因此,地磁場(chǎng)可以穩(wěn)定地為一些動(dòng)物提供導(dǎo)航信息。
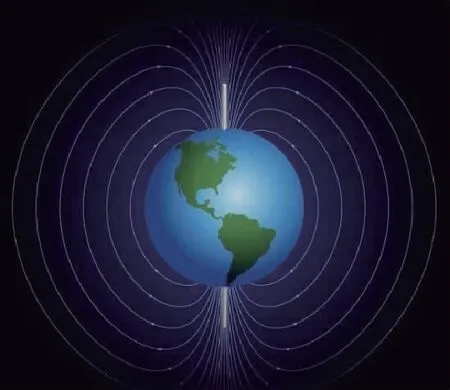
圖6 地磁場(chǎng)Fig.6 Geomagnetic field
4.2 仿生地磁導(dǎo)航的國(guó)內(nèi)外研究現(xiàn)狀
地磁導(dǎo)航可以追溯到古代使用的指南針及羅盤(pán)等,這種導(dǎo)航利用磁偏角進(jìn)行導(dǎo)航。到近代,隨著儀器設(shè)備的發(fā)展及人們對(duì)仿生地磁導(dǎo)航更加深入的研究,仿生地磁導(dǎo)航也成為了導(dǎo)航的熱點(diǎn)方向。1977年,英國(guó)Clarendon實(shí)驗(yàn)室的Leask M J通過(guò)研究候鳥(niǎo)的遷徙提出鳥(niǎo)類(lèi)的視網(wǎng)膜上有光敏色素來(lái)感知周?chē)艌?chǎng),由此發(fā)現(xiàn)了一種新的磁感知模型[65],為之后的研究奠定了基礎(chǔ)。2000年,來(lái)自美國(guó)伊利諾伊大學(xué)的Ritz等人對(duì)之前的模型進(jìn)行了修正,并且發(fā)現(xiàn)視網(wǎng)膜上的隱花色素是磁感應(yīng)系統(tǒng)的一部分[66]。2007年,Wiltschko發(fā)現(xiàn)鳥(niǎo)類(lèi)存在兩種磁感知機(jī)制,除了視網(wǎng)膜上的光受體,還有一種涉及富鐵粒子的過(guò)程。例如,鳥(niǎo)的上喙存在一種磁鐵礦納米顆粒,可以為其提供航向信息[67]。2010年,Storms W等人根據(jù)前人的理論,通過(guò)周邊磁場(chǎng)強(qiáng)度的變化,設(shè)計(jì)了室內(nèi)環(huán)境下的仿生地磁導(dǎo)航系統(tǒng)[68]。實(shí)驗(yàn)證明,該系統(tǒng)可在GNSS信號(hào)不可用時(shí)用于輔助慣性導(dǎo)航系統(tǒng)。英國(guó)倫敦大學(xué)的Marshall Stoneham等人在2012年提出了一種新型的、基于自由基的磁接收模型[69],解釋了候鳥(niǎo)可以感知地球磁場(chǎng)的理論。2015年,北卡羅來(lái)納大學(xué)的Brothers J通過(guò)研究海龜?shù)臍w巢行為證實(shí)了地磁印記假說(shuō),證明了這種印記在海龜?shù)漠a(chǎn)后歸巢中發(fā)揮著重要的作用[70]。在這之后,Lohmann K J發(fā)現(xiàn)海龜和鮭魚(yú)都具有檢測(cè)沿海地區(qū)獨(dú)特“磁性特征”所需的感官能力,而磁導(dǎo)航是海龜和鮭魚(yú)長(zhǎng)距離遷徙的主要導(dǎo)航模式[71]。2017年,西蒙弗雷澤大學(xué)的Lambinet V等人驗(yàn)證了蜜蜂可以感知磁場(chǎng)極性的假設(shè)[72]。韓國(guó)的Seong Ju-Hyeon等人通過(guò)將Wi-Fi與地磁相結(jié)合,提出了一種遞歸無(wú)線(xiàn)電圖生成算法[73],增強(qiáng)了系統(tǒng)的實(shí)時(shí)性。
在國(guó)內(nèi),許多學(xué)者也對(duì)仿生地磁導(dǎo)航技術(shù)展開(kāi)了廣泛的研究。西北工業(yè)大學(xué)對(duì)仿生地磁的研究較早,取得的成果也較為豐富。2007年,晏登洋等人將慣性系統(tǒng)與地磁模型進(jìn)行了組合,在Matlab環(huán)境下進(jìn)行了仿真,提高了系統(tǒng)精度[74]。2014年,劉明雍等人從仿生角度出發(fā),將導(dǎo)航過(guò)程歸結(jié)為多目標(biāo)搜索問(wèn)題,建立了仿生導(dǎo)航模型,提出了一種基于時(shí)序進(jìn)化策略的搜索方法[75],解決了導(dǎo)航過(guò)程中對(duì)先驗(yàn)地磁圖的依賴(lài)問(wèn)題。之后,他們針對(duì)地磁仿生導(dǎo)航過(guò)程中對(duì)搜索偏向性考慮不足的問(wèn)題,提出了一種基于探索與開(kāi)發(fā)權(quán)衡的導(dǎo)航方法[76]。實(shí)驗(yàn)證明,此方法能夠有效提高導(dǎo)航效率。2016年,劉坤針對(duì)地磁場(chǎng)異常時(shí)載體導(dǎo)航失敗的問(wèn)題,提出了一種基于行為約束策略的仿生導(dǎo)航搜索方法[77],提高了自主導(dǎo)航的成功率。2017年,李紅等人針對(duì)水下自主航行器地磁多參量多目標(biāo)搜索問(wèn)題,提出了地磁仿生導(dǎo)航的多目標(biāo)進(jìn)化搜索算法[78]。與傳統(tǒng)的六邊形路徑搜索算法相比,多目標(biāo)進(jìn)化搜索算法更具有效性和優(yōu)越性。2018年,王瓊針對(duì)地磁導(dǎo)航受到先驗(yàn)地磁圖的精度制約的問(wèn)題,提出了一種平行接近的地磁梯度仿生導(dǎo)航方法[79],解決了傳統(tǒng)方法依賴(lài)地磁先驗(yàn)信息的問(wèn)題。2013年,中國(guó)科學(xué)院的呂琰提出了一種特殊的生物物理模型,包括基于磁鐵礦和自由基的磁感應(yīng)機(jī)制[80]。實(shí)驗(yàn)表明,所提出的模型可以用傾角羅盤(pán)解釋鳥(niǎo)類(lèi)的導(dǎo)航機(jī)制。2016年,東華大學(xué)的郭鵬杰將基于地磁導(dǎo)航的定位技術(shù)應(yīng)用于小車(chē)之中,完成了智能小車(chē)的整體設(shè)計(jì)[81]。2018年,浙江大學(xué)的齊小康通過(guò)研究海龜?shù)葎?dòng)物遷徙所依據(jù)的自然線(xiàn)索,利用數(shù)學(xué)建模及工程模擬,提出了仿生學(xué)地磁導(dǎo)航模型[82]。實(shí)驗(yàn)證明,此模型在精確導(dǎo)航領(lǐng)域有很好的應(yīng)用前景。
4.3 發(fā)展趨勢(shì)
目前,針對(duì)仿生地磁導(dǎo)航的研究,國(guó)內(nèi)外尚處于仿真研究階段。對(duì)于動(dòng)物地磁導(dǎo)航使用的磁感知機(jī)制,業(yè)界的了解還不是特別深入。應(yīng)加快完善仿生地磁導(dǎo)航模型,研究新型材料,提高仿生傳感器件的靈敏度,使其向著微型化、集成化及智能化的方向發(fā)展(如圖7所示)。
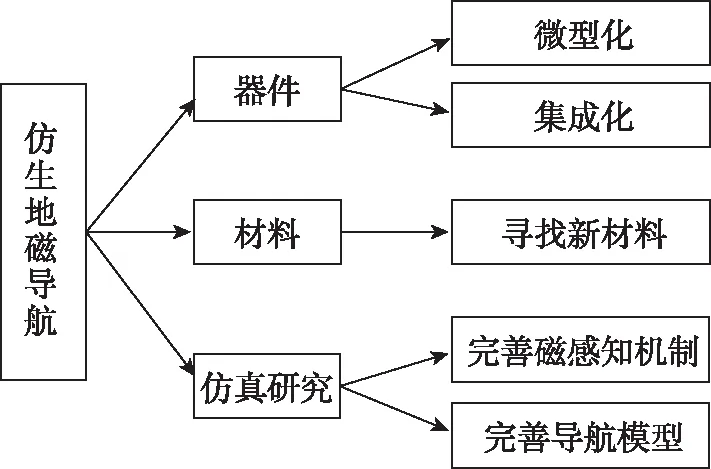
圖7 仿生地磁導(dǎo)航發(fā)展趨勢(shì)Fig.7 Bionic geomagnetic navigation development trend
5 結(jié) 論
向大自然學(xué)習(xí),向人體自身學(xué)習(xí)是仿生學(xué)永恒的主題,也是仿生導(dǎo)航技術(shù)的發(fā)展方向。通過(guò)對(duì)仿生光流、偏振光、類(lèi)腦和地磁導(dǎo)航四個(gè)方向的研究,可以看到目前仿生導(dǎo)航技術(shù)的機(jī)制已比較完善,已經(jīng)能夠制造出各種類(lèi)型的仿生傳感器,并將其成功應(yīng)用于無(wú)人機(jī)導(dǎo)航等方面。同時(shí),仿生導(dǎo)航在算法和器件上還有很大的發(fā)展空間。該研究也面臨著許多困難,其穩(wěn)定性和靈敏度還達(dá)不到較高水平,器件靈敏度和體積依然受到加工工藝與材料的限制。在未來(lái),可以利用生物基因工程與微納加工制造技術(shù)來(lái)改進(jìn)現(xiàn)有仿生導(dǎo)航器件,使其具有微型化、集成化及智能化的特點(diǎn),從而在保證小體積的前提下提高器件的靈敏度與探測(cè)的效率。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫(huà)報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
