MEMS離心隔爆滑塊閉鎖機(jī)構(gòu)
2019-09-06 07:49:38聶偉榮席占穩(wěn)李雯迪
探測與控制學(xué)報 2019年4期
關(guān)鍵詞:實(shí)驗(yàn)系統(tǒng)
徐 娜,聶偉榮,席占穩(wěn),鄭 燦,李雯迪
(南京理工大學(xué)機(jī)械工程學(xué)院,江蘇 南京 210094)
0 引言
隨著彈藥技術(shù)的發(fā)展,引信被賦予更多的功能,對引信各部分的體積分配與充分利用提出了更高的要求。因此,開展引信安全系統(tǒng)的微小型化研究已成趨勢[1]。微機(jī)電系統(tǒng)(Micro Electro-mechanical System,MEMS)因其微型化、集成化、生產(chǎn)規(guī)模化、加工成本低等優(yōu)點(diǎn)在軍事領(lǐng)域得以迅速發(fā)展,成為實(shí)現(xiàn)引信小型化和功能拓展的關(guān)鍵技術(shù)之一[2]。
MEMS技術(shù)在引信中的一個重要應(yīng)用方向就是MEMS安全系統(tǒng)。早期MEMS引信安全系統(tǒng)由Charles H.Robinson團(tuán)隊(duì)在1998年提出,并歷經(jīng)幾代優(yōu)化設(shè)計達(dá)到了較為成熟的技術(shù)[3-5]。近年來,國內(nèi)Dakui Wang等人[6-7]在早期研究的基礎(chǔ)上設(shè)計了一種適用于小口徑彈丸的高可靠性微型安全系統(tǒng),該系統(tǒng)采用電動推力器工作使鎖臂變形釋放隔爆滑塊,滑塊在離心力的作用下克服微彈簧的張力而實(shí)現(xiàn)閉鎖。田中旺,范晨陽等人[8-9]針對小口徑榴彈試驗(yàn)中后坐滑塊未能成功閉鎖問題進(jìn)行閉鎖機(jī)構(gòu)的改善設(shè)計,將原有懸臂梁由直鉤改成彎鉤的同時加大卡頭雙翼的厚度和張開角度,并通過仿真分析證明了改善后的閉鎖機(jī)構(gòu)在提高強(qiáng)度的同時降低塑性變形。X.Y.Zhang等人[10]提出了一種具有柔性觸點(diǎn)和倒鉤鎖定機(jī)構(gòu)的加速度開關(guān),當(dāng)鎖頭被鎖定時,柔性觸點(diǎn)和倒鉤鎖定機(jī)構(gòu)可以防止由于質(zhì)量塊的反彈或振動引起的沖擊而導(dǎo)致開關(guān)打開。但該開關(guān)需在幅值為1 700g、響應(yīng)時間小于0.3 ms的加速度信號下工作。
但上述MEMS安全系統(tǒng)都是應(yīng)用于小口徑榴彈且平行于彈軸放置,微小型傳爆序列處在不同平面必然使得爆轟能量傳遞時改變方向造成能量損失,甚至導(dǎo)致微起爆器無法引爆導(dǎo)爆藥和戰(zhàn)斗部而造成“啞彈”的現(xiàn)象。對于閉鎖機(jī)構(gòu)的研究大多基于高沖擊低響應(yīng)時間的內(nèi)彈道后坐過載環(huán)境,且閉鎖機(jī)構(gòu)在閉鎖時易發(fā)生塑性變形。本文針對上述問題,提出一種垂直于彈軸放置的MEMS安全系統(tǒng)的離心隔爆滑塊閉鎖機(jī)構(gòu)。
1 MEMS安全系統(tǒng)工作原理
圖1為本文針對中大口徑榴彈設(shè)計的垂直于彈軸放置的MEMS安全系統(tǒng)整體結(jié)構(gòu)。主要由后坐保險機(jī)構(gòu)、離心保險機(jī)構(gòu)、指令鎖保險機(jī)構(gòu)、隔爆滑塊、基板框架等組成。在正常發(fā)射時,彈丸經(jīng)過膛內(nèi)火藥氣體推動作用,產(chǎn)生較大的后坐過載,懸臂卡鎖式后坐保險機(jī)構(gòu)識別后坐過載環(huán)境向下運(yùn)動解除對隔爆滑塊的第一道保險。同時由于膛線的作用,彈丸會在同樣時間內(nèi)獲得較大轉(zhuǎn)速,使安全系統(tǒng)產(chǎn)生離心力。隔爆滑塊在離心力的作用下向右運(yùn)動解除對離心保險機(jī)構(gòu)的約束,離心卡鎖在離心力的作用下帶動離心彈性梁向外側(cè)運(yùn)動,解除對隔爆滑塊的第二道保險。由于離心力的持續(xù)作用,指令鎖保險機(jī)構(gòu)的柔性鎖臂緊密抵在基板上,阻擋隔爆滑塊繼續(xù)向右運(yùn)動。當(dāng)彈丸飛行至炮口安全距離之外,通過彈道實(shí)時信息控制電推銷器發(fā)火,推動指令鎖柔性鎖臂進(jìn)入活動腔,解除對隔爆滑塊的延期保險。在離心力作用下,隔爆滑塊繼續(xù)向右運(yùn)動,閉鎖機(jī)構(gòu)進(jìn)而運(yùn)動到位并鎖定,傳爆序列上下對正,引信處于待發(fā)狀態(tài)。閉鎖機(jī)構(gòu)的可靠閉鎖和準(zhǔn)確定位是保證傳爆序列對正的前提,對整個系列動作的完成至關(guān)重要。
圖1 MEMS安全系統(tǒng)整體結(jié)構(gòu)Fig.1 Overall structure of MEMS safety system
2 閉鎖機(jī)構(gòu)設(shè)計
考慮隔爆安全性因素,隔爆滑塊從初始位置運(yùn)動至閉鎖位置距離為3 mm。閉鎖機(jī)構(gòu)由L型閉鎖梁、鎖頭、剛性定位塊組成,如圖2所示。鎖頭設(shè)置在隔爆滑塊空槽中,槽壁能夠防止閉鎖時L型閉鎖梁出現(xiàn)變形過大無法恢復(fù)問題,剛性定位塊起到限制鎖頭位移作用。該閉鎖機(jī)構(gòu)兼具閉鎖和定位的功能,可以在外彈道離心力作用下閉鎖時不發(fā)生塑性變形,準(zhǔn)確定位,保證傳爆序列有效對正。
當(dāng)外界激勵大于臨界值時,隔爆滑塊上的鎖頭可以撐開L型閉鎖梁實(shí)現(xiàn)快速可靠閉鎖,使得隔爆滑塊上傳爆空腔與起爆器和傳爆藥處在對正位置,同時L型閉鎖梁在閉鎖時不發(fā)生塑性變形,提高了MEMS安全系統(tǒng)的安全性與可靠性。
圖2 閉鎖機(jī)構(gòu)結(jié)構(gòu)圖Fig.2 Blocking mechanism structure
3 閉鎖機(jī)構(gòu)的基本分析
3.1 理論分析
鎖頭能夠完全進(jìn)入鎖座是閉鎖機(jī)構(gòu)可靠閉鎖的前提。假設(shè)鎖頭撐開閉鎖梁過程中微彈簧拉力和鎖座阻力不變,其值等于鎖頭剛好進(jìn)入鎖座臨界狀態(tài)時的最大值,則此過程中隔爆滑塊的軸向加速度表達(dá)式[11]為:
(1)
式(1)中,m為隔爆滑塊和微彈簧的總質(zhì)量;K為微彈簧的彈性系數(shù);Δy為鎖頭由靜止至完全進(jìn)入鎖座的軸向位移;FNmax為鎖頭完全進(jìn)入卡座臨界時刻對閉鎖梁的擠壓力;fNmax為鎖頭完全進(jìn)入卡座臨界時刻對閉鎖梁的摩擦力,fNmax=μFNmax;θ為鎖頭側(cè)邊與其中軸所成的角度。
假設(shè)鎖頭能夠完全進(jìn)入鎖座,則臨界時刻閉鎖梁受力如圖3所示。鎖座閉鎖梁在鎖頭的擠壓作用下產(chǎn)生的x軸向位移最大,鎖頭對閉鎖梁的作用力最大,表達(dá)式為:
(2)
式(2)中,E為材料彈性模量;b為閉鎖梁等截面梁的線寬;h為閉鎖梁等截面梁的高度;L為鎖頭底端至末端的距離。
圖3 鎖頭完全進(jìn)入鎖座臨界時刻閉鎖梁受力分析Fig.3 Stress analysis of the locking beam when the lock head completely enters the lock seat
將相關(guān)設(shè)計參數(shù)代入式(1)、式(2)中,推算出此過程中離心隔爆滑塊的實(shí)際運(yùn)動加速度aJ>0,由此可判斷此過程中隔爆滑塊鎖頭能夠完全進(jìn)入鎖座。
3.2 仿真分析
為了更清楚地了解隔爆滑塊的閉鎖運(yùn)動過程,利用ABAQUS有限元分析軟件建立閉鎖機(jī)構(gòu)有限元模型,分析其閉鎖可靠性。安全系統(tǒng)整體是基于電鑄鎳材料設(shè)計的MEMS結(jié)構(gòu),由于電鑄鎳材料的機(jī)械性能與電鑄過程中的電流密度、電鑄時間、電鑄面積、加工厚度等因素有密切關(guān)系,材料參數(shù)會有一定的差異,為便于分析,電鑄鎳材料的參考參數(shù)[12]如表1所示。

表1 電鑄鎳材料參數(shù)
中大口徑榴彈彈丸在發(fā)射過程中一直處于旋轉(zhuǎn)狀態(tài),在出炮口時轉(zhuǎn)速最大,達(dá)到8 000 r/min。出炮口之后進(jìn)入飛行環(huán)境階段,受到空氣阻力等因素影響,轉(zhuǎn)速逐漸降低,在達(dá)到炮口安全距離之外后,轉(zhuǎn)速降低至7 000 r/min左右。結(jié)合設(shè)計要求,對結(jié)構(gòu)施加離心加速度,分析其仿真結(jié)果。根據(jù)仿真結(jié)果得出離心加速度在268.1g時(對應(yīng)轉(zhuǎn)速約為7 000 r/min)閉鎖機(jī)構(gòu)鎖頭進(jìn)入L型閉鎖梁鎖座。在該環(huán)境下得到閉鎖機(jī)構(gòu)應(yīng)力云圖和鎖頭位移曲線圖,如圖4所示。
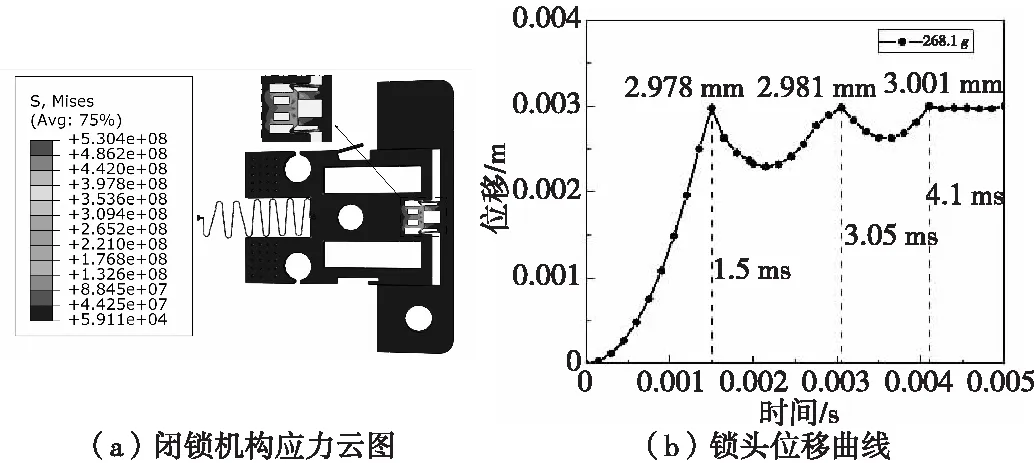
圖4 268.1g離心加速度下閉鎖機(jī)構(gòu)仿真結(jié)果Figure 4 Simulation results of the locking mechanism under 268.1g centrifugal acceleration
從圖4(a)中可知隔爆滑塊閉鎖狀態(tài),最大應(yīng)力為530 MPa出現(xiàn)在彈簧拉伸彎曲處,小于電鑄鎳材料的屈服極限750 MPa,整體結(jié)構(gòu)不會發(fā)生塑性變形,符合強(qiáng)度設(shè)計要求。從圖4(b)可知,鎖頭在t=1.5 ms時位移達(dá)到2.978 mm完成第一次閉鎖,由于閉鎖機(jī)構(gòu)中剛性定位塊的存在,鎖頭與剛性定位塊產(chǎn)生碰撞作用出現(xiàn)短暫反彈現(xiàn)象。此時離心力持續(xù)作用,鎖頭在反彈一段距離后繼續(xù)向鎖座運(yùn)動,運(yùn)動距離和碰撞速度減小,鎖頭在t=3.05 ms時位移達(dá)到2.981 mm完成第二次閉鎖。鎖頭第二次閉鎖碰撞反彈之后在離心力作用下繼續(xù)向鎖座運(yùn)動,在t=4.1 ms時第三次閉鎖成功,此時位移達(dá)到3.001 mm。在t=4.1 ms之后,鎖頭進(jìn)入鎖座后與剛性定位塊繼續(xù)發(fā)生多次碰撞反彈,但在反彈過程中,鎖頭始終沒有脫離L型閉鎖梁的約束,最后穩(wěn)定在鎖頭與鎖座緊密接觸狀態(tài)。L型閉鎖梁緊緊卡住鎖頭,閉鎖機(jī)構(gòu)已經(jīng)實(shí)現(xiàn)穩(wěn)定閉鎖。
圖5為閉鎖機(jī)構(gòu)鎖頭在進(jìn)入含L型閉鎖梁鎖座的最終閉鎖狀態(tài)。L型閉鎖梁被鎖頭撐開后在彈力的作用下恢復(fù)卡住鎖頭從而完成閉鎖。L型閉鎖梁在整個閉鎖過程中的應(yīng)力變化如圖6所示。L型閉鎖梁在t=3.35 ms時達(dá)到最大應(yīng)力396 MPa,小于電鑄鎳材料的屈服極限750 MPa,說明閉鎖梁不會發(fā)生塑性變形,最終會在彈力的作用下恢復(fù)從而卡住鎖頭實(shí)現(xiàn)穩(wěn)定閉鎖。

圖5 閉鎖機(jī)構(gòu)最終狀態(tài)Fig.5 Final state of the locking mechanism

圖6 L型閉鎖梁應(yīng)力變化Fig.6 L-shaped locking beam stress change
4 實(shí)驗(yàn)驗(yàn)證
4.1 離心實(shí)驗(yàn)
采用UV-LIGA技術(shù)加工出的MEMS安全系統(tǒng)樣機(jī)如圖7所示。基于仿真結(jié)果,通過離心實(shí)驗(yàn)臺開展閉鎖過程加載試驗(yàn),驗(yàn)證閉鎖機(jī)構(gòu)的可靠性。實(shí)驗(yàn)前分別將后坐保險機(jī)構(gòu)和離心保險機(jī)構(gòu)去除,將指令鎖保險機(jī)構(gòu)柔性鎖臂推入活動腔。
離心實(shí)驗(yàn)平臺搭建如圖8所示。離心轉(zhuǎn)盤的電機(jī)采用直流無刷電機(jī)控制器(WS55-180)控制,通過Arduino開發(fā)板控制電機(jī)電壓信號,轉(zhuǎn)盤上裝有磁鐵,霍爾傳感器每接近磁鐵一次即產(chǎn)生一個低電平信號發(fā)送到Arduino開發(fā)板,根據(jù)兩次低電平信號的時間差值可以計算出離心轉(zhuǎn)盤的轉(zhuǎn)速。MEMS安全保險機(jī)構(gòu)受到的離心加速度可以表示為:
(3)
式(3)中,n為離心轉(zhuǎn)盤的轉(zhuǎn)速,r為MEMS安全系統(tǒng)樣機(jī)與離心轉(zhuǎn)盤圓心的距離。
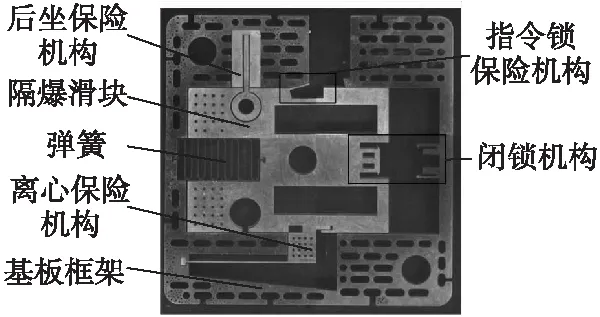
圖7 MEMS安全系統(tǒng)樣機(jī)Fig.7 MEMS safety system prototype
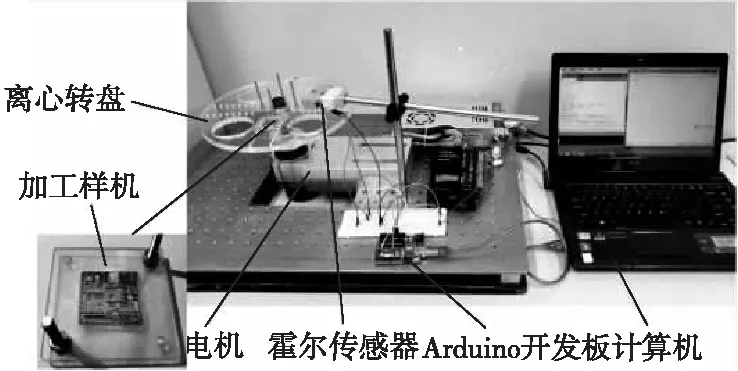
圖8 離心實(shí)驗(yàn)Fig.8 Centrifugation experiment
為了使離心實(shí)驗(yàn)更加精確,對同一批次加工的四組樣機(jī)進(jìn)行編號,沿順時針方向依次安裝在轉(zhuǎn)盤半徑方向,如圖9所示。四組樣機(jī)距離轉(zhuǎn)盤中心均為5 cm,在相同轉(zhuǎn)速下進(jìn)行實(shí)驗(yàn)。
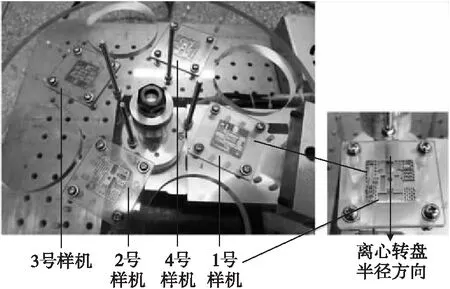
圖9 四組樣機(jī)實(shí)驗(yàn)圖Fig.9 Four sets of prototype experiment diagram
為了確定閉鎖機(jī)構(gòu)從未能閉鎖狀態(tài)到閉鎖成功狀態(tài)的臨界離心加速度,實(shí)驗(yàn)初始對轉(zhuǎn)盤施加轉(zhuǎn)速為2 100 r/min(對應(yīng)離心加速度241.6g),觀察到閉鎖機(jī)構(gòu)未能閉鎖。之后對轉(zhuǎn)盤依次增加10 r/min的轉(zhuǎn)速,觀察閉鎖機(jī)構(gòu)實(shí)驗(yàn)結(jié)果。當(dāng)轉(zhuǎn)盤轉(zhuǎn)速為2 220 r/min即離心加速度為269.5g時,1、2、3號樣機(jī)均實(shí)現(xiàn)穩(wěn)定閉鎖。實(shí)驗(yàn)結(jié)果如表2所示,閉鎖機(jī)構(gòu)離心實(shí)驗(yàn)后如圖10所示。
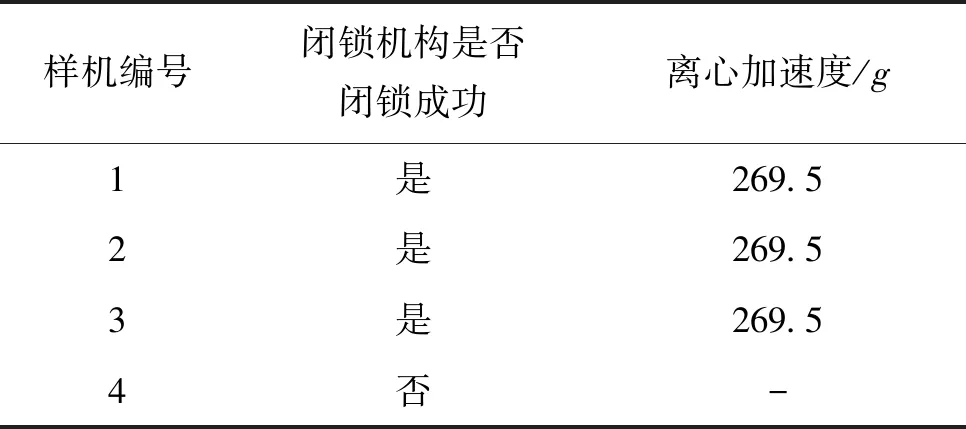
表2 閉鎖機(jī)構(gòu)實(shí)驗(yàn)結(jié)果
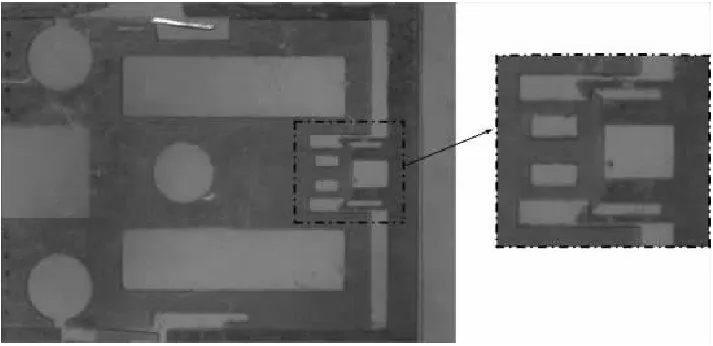
圖10 離心實(shí)驗(yàn)后閉鎖機(jī)構(gòu)狀態(tài)Fig.10 Locking mechanism status after centrifugation
對于4號樣機(jī)在在離心加速度為269.5g時未能閉鎖的現(xiàn)象,考慮到4號樣機(jī)閉鎖的臨界離心加速度可能高于269.5g,對轉(zhuǎn)盤繼續(xù)施加更高轉(zhuǎn)速單獨(dú)觀察4號樣機(jī)的閉鎖狀況。實(shí)驗(yàn)過程中發(fā)現(xiàn)4號樣機(jī)在轉(zhuǎn)盤轉(zhuǎn)速達(dá)到3 500 r/min時(對應(yīng)離心加速度670.4g)仍然不能閉鎖,說明4號樣機(jī)可能由于加工誤差或裝配誤差較大等因素始終無法閉鎖。
4.2 實(shí)驗(yàn)結(jié)果分析
實(shí)驗(yàn)結(jié)果表明,1,2,3號樣機(jī)在離心加速度為269.5g時,均能閉鎖成功,與離心加速度為268.1g時實(shí)現(xiàn)閉鎖的仿真結(jié)果基本吻合。針對4號樣機(jī)未能閉鎖的結(jié)果,采用SEM掃描電鏡對其進(jìn)行特征尺寸測量,結(jié)果如圖11。

圖11 4號樣機(jī)特征尺寸測量Fig.11 Sample size measurement of sample 4
從圖11中可知,鎖頭與閉鎖梁的重合尺寸為98.59 μm,閉鎖梁在撐開方向的有限位移空間為65.73 μm,閉鎖梁在隔爆滑塊槽壁的阻擋下無法被鎖頭完全撐開使得閉鎖失敗。誤差原因主要來自:1)加工誤差。采用UV-LIGA技術(shù)加工時,考慮到SU-8膠溶脹誤差和腐蝕誤差造成結(jié)構(gòu)尺寸偏小的現(xiàn)象,采用了掩膜版線寬補(bǔ)償方法,但由于掩膜版的補(bǔ)償量未能精確把握,加工出的樣機(jī)出現(xiàn)尺寸偏大的現(xiàn)象。2)裝配誤差。考慮加工成品率等因素,采用多層UV-LIGA技術(shù)分別加工出彈簧、后坐保險機(jī)構(gòu)、離心保險機(jī)構(gòu)、隔爆滑塊及基板框架五個部件,在微操作臺上完成MEMS安全系統(tǒng)各部件的拾取、定位、組裝。由于各部件尺寸微小,在組裝過程中產(chǎn)生了裝配誤差。最終導(dǎo)致閉鎖梁在撐開方向的有限位移空間小于鎖頭與閉鎖梁的重合尺寸,使得4號樣機(jī)未能實(shí)現(xiàn)可靠閉鎖。
5 結(jié)論
本文提出了一種應(yīng)用于中大口徑榴彈且垂直于彈軸放置的MEMS安全系統(tǒng)的離心隔爆滑塊閉鎖機(jī)構(gòu)。該機(jī)構(gòu)可以實(shí)現(xiàn)在外彈道離心力作用下可靠閉鎖和準(zhǔn)確定位的功能,且閉鎖時不發(fā)生塑性變形。通過理論分析了閉鎖機(jī)構(gòu)鎖頭進(jìn)入鎖座的可行性,采用仿真分析和樣機(jī)實(shí)驗(yàn)驗(yàn)證了閉鎖機(jī)構(gòu)的功能。仿真分析閉鎖機(jī)構(gòu)在268.1g的離心加速度下實(shí)現(xiàn)可靠閉鎖,L型閉鎖梁最大應(yīng)力為396 MPa,小于電鑄鎳材料的屈服極限,不會發(fā)生塑性變形。樣機(jī)實(shí)驗(yàn)得出閉鎖機(jī)構(gòu)在離心加速度為269.5g時能夠閉鎖成功。仿真和實(shí)驗(yàn)結(jié)果表明,此閉鎖機(jī)構(gòu)在達(dá)到臨界離心加速度時能夠?qū)崿F(xiàn)可靠閉鎖,且L型閉鎖梁在閉鎖時不發(fā)生塑性變形。由于閉鎖機(jī)構(gòu)兼具定位的功能,通過有限元仿真分析發(fā)現(xiàn)鎖頭運(yùn)動至最大位移與剛性定位塊碰撞后出現(xiàn)數(shù)次反彈現(xiàn)象,后期可以考慮將定位作用分離出來,并從柔性碰撞方面對閉鎖機(jī)構(gòu)作進(jìn)一步研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52