一種慣性測量組合陀螺常值漂移外場標定方法
2019-09-02 12:27:22張秦南迪玉茹國琳娜王立文
水下無人系統學報 2019年4期
阮 衛, 張秦南, 迪玉茹, 國琳娜, 王立文
?
一種慣性測量組合陀螺常值漂移外場標定方法
阮 衛1,2, 張秦南1, 迪玉茹1, 國琳娜1, 王立文1
(1. 中國船舶重工集團公司 第705研究所, 陜西 西安, 710077; 2. 水下信息與控制國防重點實驗室, 陜西 西安, 710077)
針對慣性測量組合(IMU)外場標定問題, 文中提出一種IMU陀螺常值漂移3位置外場標定方法。在靜基座條件下, 先利用二次對準技術測出產品的姿態角, 再利用卡爾曼濾波估計北向陀螺漂移, 結合3個位置的姿態角和北向陀螺漂移, 再利用最小二乘法對陀螺漂移進行求解。仿真結果表明, 該標定方法簡單易行, 無需轉臺, 能夠對陀螺常值漂移進行有效估計。
慣性測量組合; 標定; 卡爾曼濾波; 陀螺常值漂移
0 引言
慣性測量組合(inertial measuring unit, IMU)參數估計與補償對提高慣性導航精度具有重要意義[1], 因此需要對IMU進行標定以保證其滿足使用要求。然而, 隨著時間的推移和環境的變化[2], 以及IMU中電子元器件的老化, 相關參數必然發生變化, 從而導致IMU指標超差, 無法滿足對準和導航的使用要求。
陀螺常值漂移是IMU主要性能指標, 實航中航姿角的精度主要取決于陀螺常值漂移。文獻[3]提出一種雙位置陀螺常值漂移估計方法, 將加速度作為量測, 設計卡爾曼濾波器估計陀螺常值漂移, 但需要較高精度轉臺實現旋轉。文獻[4]提出一種整彈不開箱條件下IMU 7位置標定方案, 通過俯仰30°等7個小姿態特殊位置進行組件級標定, 但同樣要求轉臺精度小于1°, 不適用于沒有精密轉臺的現場標定。文獻[5]由線性系統理論得出, 靜止狀態下慣導系統有6個狀態變量是不可觀測的。文獻[6]在研究車載IMU免拆卸標定方案中, 證明陀螺常值漂移和水平加速度計零偏是可觀測的。文獻[7]提出二次對準技術, 對姿態矩陣連續進行2次修正, 可以解決現場存在的大失準角問題。
通過對上述文獻的分析和研究, 文中提出一種IMU簡易3位置標定方法, 并進行數學仿真。該方法現場僅需指北基準且允許指北基準存在較大的誤差。
1 理論分析
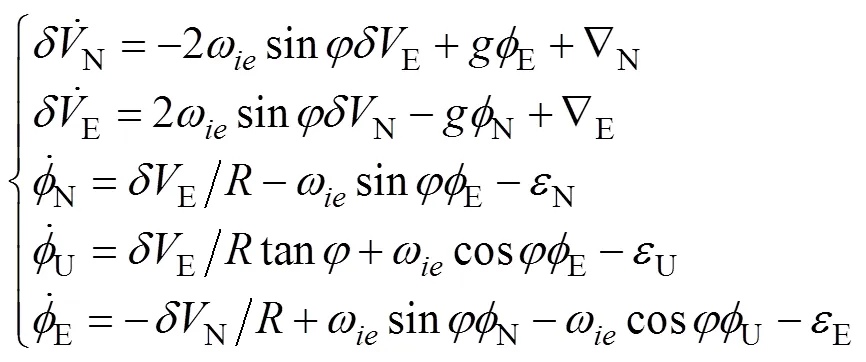
文中導航坐標系選取北天東, 機體坐標系選取前上右, 靜基座條件下慣導系統誤差方程為

2 數學模型建立








3 數學仿真
建立卡爾曼濾波方程
量測方程為


圖1 3位置標定方案
IMU在位置1大概水平指北位置靜止300 s生成數據; 然后大概偏航90°到位置2靜止300 s;在位置2的基礎大概橫滾20°到位置3靜止300 s。3個位置姿態角真實值如表1所示。
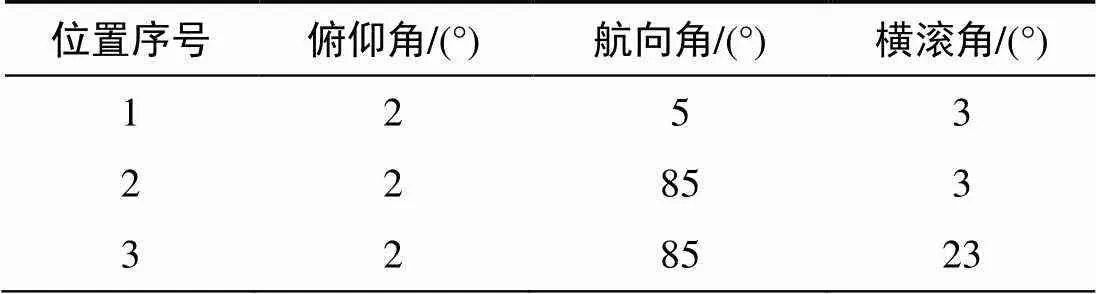
表1 3位置姿態角設置
按照編排方案生成陀螺儀和加速度計輸出如圖2和圖3所示。
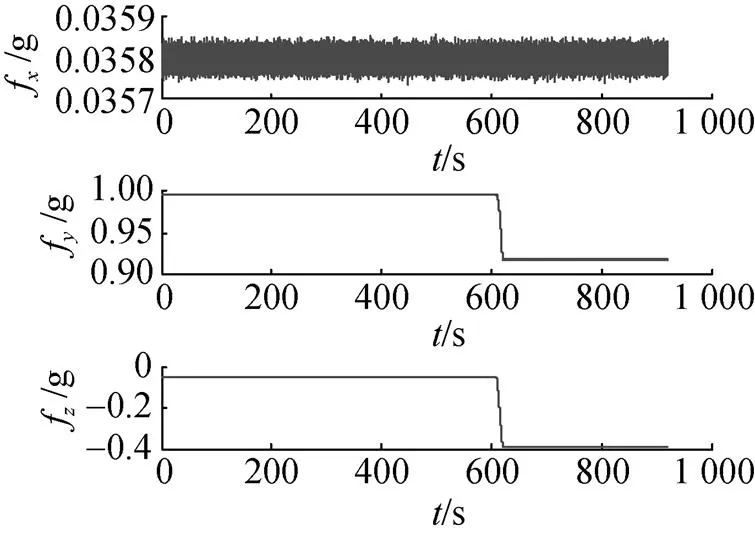
圖2 陀螺儀仿真數據
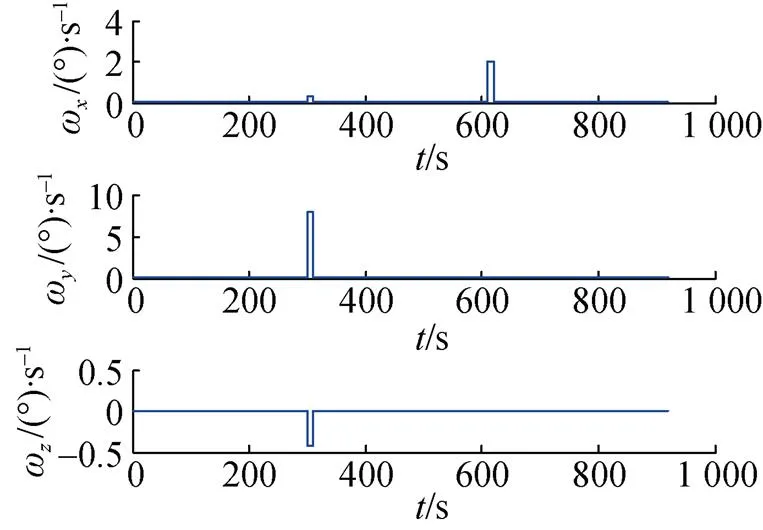
圖3 加速度計仿真數據
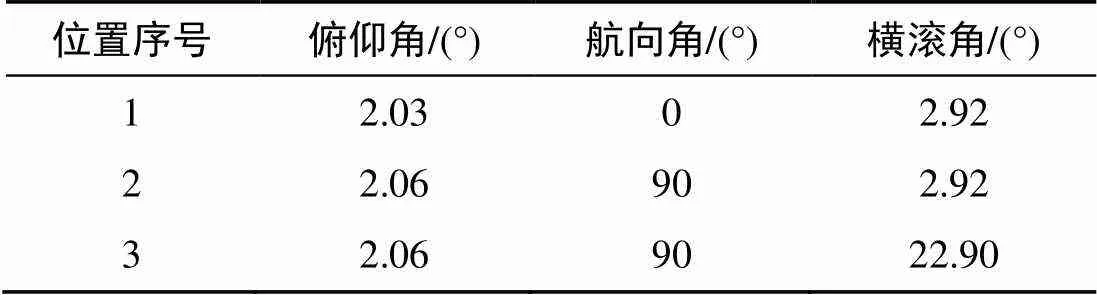
表2 3位置姿態角計算值
二次對準完成后對每個位置的北向陀螺漂移進行估計, 結果如圖4所示。
每個位置具體北向陀螺漂移估計值如表3所示。
由表4可以看出, 在考慮最大5°航向角誤差的情況下, 陀螺常值漂移最大絕對誤差為0.06°/h, 可以滿足低等精度IMU(陀螺漂移為1~10°/h)的標定要求, 從而驗證3位置標定方案的正確性。
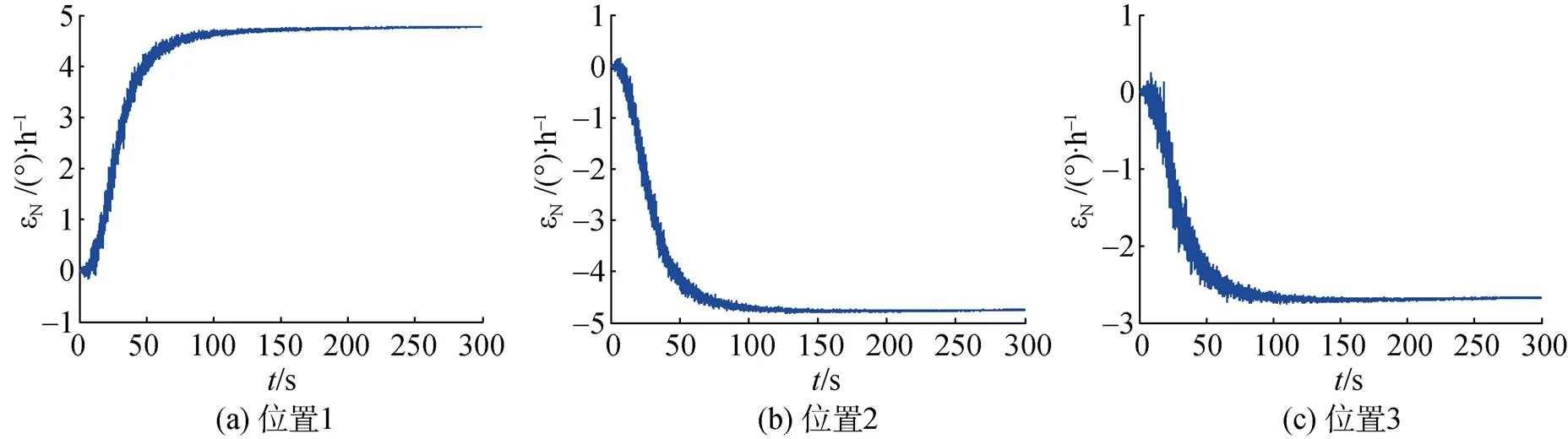
圖4 3位置北向陀螺常值漂移估計曲線
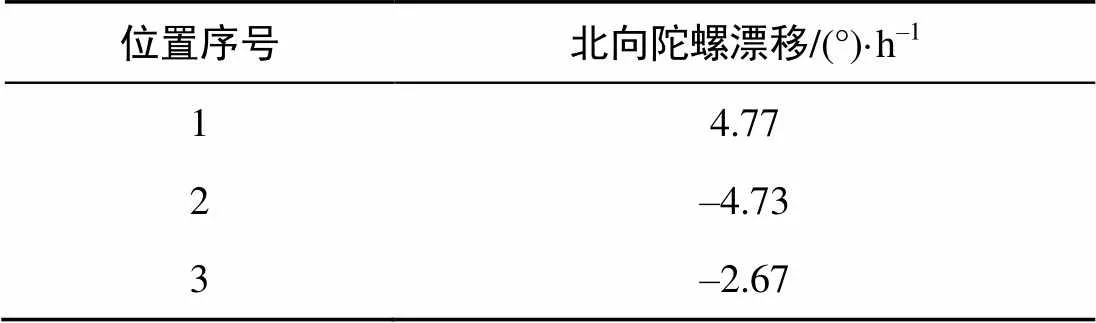
表3 3位置北向陀螺常值漂移估計值
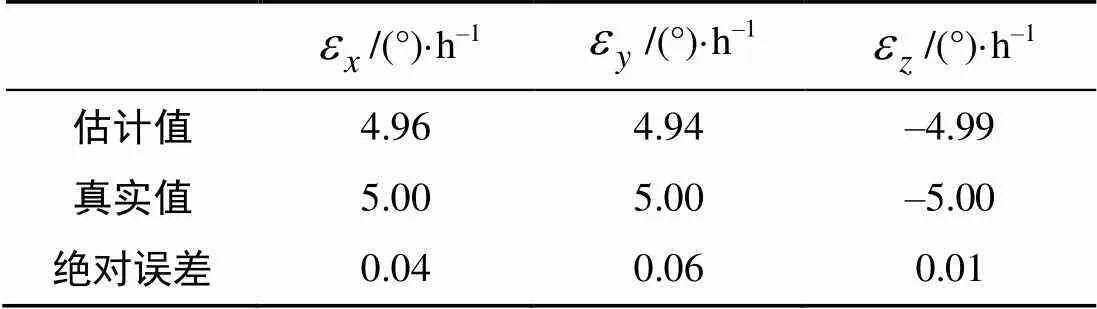
表4 陀螺常值漂移估計值與真實值對比
4 結束語
針對現場指北基準可能存在較大誤差的問題, 文中提出一種IMU簡易3位置標定方案, 在每一位置先利用二次對準技術對姿態矩陣進行精確修正, 再對北向陀螺漂移進行估計, 最后結合最小二乘法完成對陀螺漂移的求解。3位置標定方案與傳統方法相比, 步驟簡單、標定成本低, 具有重要的理論和實用價值, 可為IMU免拆卸標定提供研究思路。
[1] 楊曉霞, 黃一. 利用ESO和TD進行的激光捷聯慣組誤差參數外場標定方法[J]. 中國慣性技術學報, 2010, 18 (1): 1-9.Yang Xiao-xia, Huang Yi. Application of ESO and TD to Outer Field Calibration of Laser Gyro SINS[J]. Journal of Chinese Inertial Technology, 2010, 18(1): 1-9.
[2] 吳平, 雷虎民, 邵磊, 等. 一種車載筒彈慣導裝置不開箱標定方法[J]. 中國慣性技術學報, 2010, 18(1): 28-32. Wu Ping, Lei Hu-min, Shao Lei, et al. Calibration without Opening Box for Vehicle Silo Missile’s Inertia Instrument[J]. Journal of Chinese Inertial Technology, 2010, 18(1): 28-32.
[3] 徐曉蘇, 萬德鈞. 船用捷聯式慣導系統初始對準及對陀螺儀隨機常值漂移估計方法的研究[J]. 中國慣性技術學報, 1990(2): 17-24.Xu Xiao-su, Wan De-jun. A Study of The Methods of Initial Alignment and Estimation of Gyro’s Random Constant Drifts in Marine SINS[J]. Journal of Chinese Inertial Technology, 1990(2): 17-24.
[4] 馮志剛, 鄒穎. 整彈不開箱的慣性系統射前小姿態標定方法[J]. 中國慣性技術學報, 2009, 17(1): 33-36, 41.Feng Zhi-gang, Zou Ying. Method of Small Gesture Calibration for Inertial Measurement Units without Opening Box Pre-Launch[J]. Journal of Chinese Inertial Techno- logy, 2009, 17(1): 33-36, 41.
[5] Saab S, Gunnarsson K T. Automatic Alignment and Calibration of an Inertial System[C]//Position Location and Navigation Symposium. Las Vegas, NV, USA: IEEE, 1994.
[6] 趙曉偉, 孫謙. 一種車載激光捷聯慣組免拆卸標定方法[J]. 導航與控制, 2016, 15(1): 17-22.Zhao Xiao-wei, Sun Qian. A Free Disassembly Calibration Method for Strapdown Inertial Navigation System Based on the Vehicle[J]. Navigation and Control, 2016, 15(1): 17-22.
[7] 張秦南. 快速高精度的二次對準技術研究[J]. 魚雷技術, 2001, 9(3): 33-36.
An Outer Field Calibration Method of IMU Gyro Constant Drift
RUAN Wei1,2, ZHANG Qin-nan1, DI Yu-ru1, GUO Lin-na1, WANG Li-wen1
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi’an 710077, China; Science and Technology on Underwater Information and Control Laboratory, Xi’an 710077, China)
To solve the problem of inertial measuring unit(IMU) gyro constant drift in outer field calibration, a three-position outer field calibration method of IMU gyro constant drift is proposed. Under the static pedestal condition, the attitude angles of the product are measured by the secondary alignment technique, and then the north gyro drift is estimated by Kalman filter. Finally, the gyro drift is solved by the least squares method via combining the attitude angles of the three positions with the north gyro drift. Simulation results show that this method can estimate gyro constant drift effectively without using turntable.
inertial measuring unit(IMU); calibration; Kalman filter; gyro constant drift
TJ630.33; U666.12
A
2096-3920(2019)04-0442-04
10.11993/j.issn.2096-3920.2019.04.012
阮衛, 張秦南, 迪玉茹, 等. 一種慣性測量組合陀螺常值漂移外場標定方法[J]. 水下無人系統學報, 2019, 27(4): 442-445.
2018-12-04;
2019-03-21.
阮 衛(1993-), 男, 在讀碩士, 主要研究方向為水下航行器導航與控制技術.
(責任編輯: 陳 曦)
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年24期)2015-04-09 12:04:36