基于目標舷別判斷的火箭助飛魚雷射擊方法
2019-09-02 12:27:18趙艾奇姜麗偉
水下無人系統學報 2019年4期
趙艾奇, 王 戈, 孫 建, 高 天, 姜麗偉
基于目標舷別判斷的火箭助飛魚雷射擊方法
趙艾奇1, 王 戈2, 孫 建1, 高 天1, 姜麗偉1
(1. 中國船舶工業系統工程研究院, 北京, 100094; 2. 海軍駐北京地區武備配套軍代室, 北京, 100094)
在對火箭助飛魚雷反潛作戰特點和水下彈道特點分析的基礎上, 提出了一種對目標當前位置射擊方法的改進和優化方法, 通過對目標舷別的判斷來確定戰斗載荷水下搜索方式和落點偏移瞄準量, 進而確定魚雷射擊參數。建立了單雷射擊模型和雙雷齊射射擊數學模型, 運用該方法進行了反潛作戰效能仿真分析, 結果表明, 該方法可以有效提高火箭助飛魚雷反潛作戰效能, 特別是打擊遠距離高速機動目標的效果, 該方法為火箭助飛魚雷作戰使用提供了決策支持和理論參考。
火箭助飛魚雷; 目標舷別; 射擊方法; 作戰效能
0 引言
火箭助飛魚雷(也稱反潛導彈)作為一種中遠程反潛武器, 具有打擊速度快、攻擊距離遠、系統反應時間短等特點。目前各主要國家海軍均裝備了火箭助飛魚雷, 廣泛應用于水面艦艇中遠程快速反潛。火箭助飛魚雷可以視為導彈和魚雷的結合體, 其射擊方法與這2種武器的射擊方法相比, 有可借鑒之處, 但又有所不同。在對抗條件下, 一旦發現目標就實施快速對潛打擊, 取得對抗優勢或先手的重要性日益凸顯, 因此有必要開展火箭助飛魚雷射擊方法研究, 從而有效支撐作戰使用研究和指揮決策。
1 火箭助飛魚雷射擊方法
火箭助飛魚雷的射擊方法主要分為3種: 目標提前位置射擊方法(也稱前置點射擊方法)、目標概略位置射擊方法、目標當前位置射擊方法(也稱現在點射擊方法)[1-2]。
目前, 基于目標提前位置射擊方法的相關研究[3-6], 無論是否進行了提前角修正, 其本質仍然是通過解算相遇點進行對目標的精確打擊。對目標精確打擊的前提是對目標運動特性的準確分析, 這需要對目標位置信息采用濾波、平滑算法解算目標運動要素, 進而根據目標運動要素和位置信息計算火箭助飛魚雷射擊諸元。該方法的優點是在目標保持等速直航的條件下, 反潛作戰效能較高; 缺點是濾波算法決定了需要連續的多個目標信息才能收斂, 從而精確解算出目標運動要素, 由于聲吶系統主動探測周期長, 這往往需要數分鐘的時間。在實際作戰過程中, 由于目標潛艇檢測到水面艦艇聲吶發射的探測聲波后, 往往采取變向變速機動規避措施, 導致水面艦聲吶系統丟失目標。這種情況會造成目標運動要素解算精度大幅度下降, 甚至遠遠偏離目標實際位置, 進而導致射擊失準。因此在實際作戰過程中提前點射擊方法效果不理想。
目標概略位置射擊方法是在解算出目標運動要素的基礎上, 根據分析認為在反潛武器發射后目標潛艇會采取機動措施偏離其初始航向, 因此通過采取一定的提前量對目標可能區域進行射擊, 該提前角是一個固定值或者解算提前角的加權值(加權系數小于1, 一般是通過仿真試驗得出的經驗值)[1, 6-8]。這種方法的優點是不再假定目標勻速直航, 對實際作戰適應性相對提前點射擊方法效果更好; 其缺點與提前點射擊方法相同, 仍然依賴于艦載聲吶系統的長時間連續跟蹤。當然, 在對解算精度要求降低的前提下, 可以縮短一定的聲吶系統連續跟蹤時間, 這種情況也稱為對目標可能區域射擊方法[7]。
采用現在點射擊方法是另一種攻擊方式, 即發射武器打擊傳感器當前探測到的目標位置, 該射擊方法不進行任何解算, 僅進行方位距離的換算[1,7-8]。該方法的優點是不需要長時間對目標跟蹤, 發射反應時間短; 缺點是由于沒有對目標進行精確運動分析, 對遠距離高速潛艇目標的作戰效能不高。
2 火箭助飛魚雷反潛作戰特點
火箭助飛魚雷具有接敵速度快的技術特點, 而且所打擊目標距離較遠, 難以長時間穩定跟蹤, 適合采用現在點射擊方法。通過仿真分析發現, 其對遠程高速水下目標的打擊效果會明顯下降, 原因是對于遠距離、高速運動的水下目標, 當火箭助飛魚雷飛行到達原定目標位置時, 潛艇的運動距離已超出了魚雷水下自導搜索范圍, 尤其是在一部分敵舷角范圍內會出現作戰效能明顯下降。因此, 如何通過改進火箭助飛魚雷射擊方法, 從而提高打擊遠距離高速水下目標的作戰效能是一項亟待解決的問題。
火箭助飛魚雷的射擊方法與其全彈道特性密切相關, 全彈道包括空中飛行彈道和水下彈道,作為一種反潛武器, 其水下彈道與射擊方法的匹配性與作戰效能尤為密切。
隨著潛艇的隱蔽性逐步提高, 對潛探測難度越來越大。而且為了保證提供火箭助飛魚雷攻擊所需的目標位置信息, 需采用主動聲吶對潛探測, 潛艇在接收到聲吶主動探測信號后, 往往會采取機動等戰術規避手段。此外, 由于火箭助飛魚雷攻擊遠距離目標時, 本艦聲吶無法探測到目標, 一般采用反潛直升機等編隊探測平臺作為目標指示來源, 由于反潛直升機懸停探測時間有限, 難以長時間連續跟蹤探測, 同時跨平臺協同指揮組織難度大。
3 火箭助飛魚雷射擊方法數學模型
文中所討論的火箭助飛魚雷特征假定如下: 戰斗載荷入水結束后即轉入搜索彈道, 水下自導體制為主動聲自導, 水下搜索彈道為環行彈道。
3.1 目標舷別可計算條件下的射擊數學模型
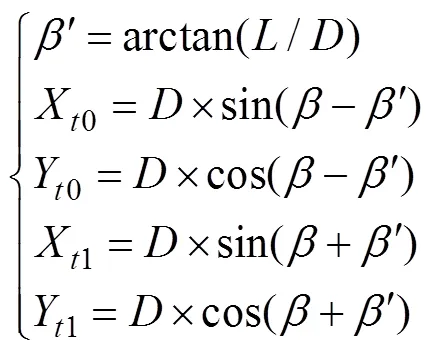
通過艦外平臺傳感器獲得遠距離水下目標的位置信息后, 本艦指揮控制系統將艦外平臺所發送的目標絕對坐標(經度、緯度)通過坐標系變換, 轉換為以本艦為原點的極坐標系相對坐標(方位、距離), 并將轉換過的目標信息持續傳送至反潛武器系統。轉換后的目標坐標為
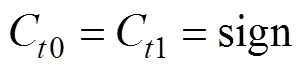
反潛武器系統根據指控系統連續傳送的幾個不同的目標位置信息, 解算目標運動的大致方向或目標舷別, 即可判斷出目標的大致運動方向是向目標方位線的左側還是右側。其判別基本原則為: 當方位變化率為正時, 目標舷別為右舷; 當方位變化率為負時, 目標舷別為左舷。目標舷別計算公式
根據判斷出的目標運動舷別, 設定火箭助飛魚雷戰斗載荷的水下旋回方向。當判明目標舷別為右舷, 魚雷水下旋回方向為右旋搜索; 當判明目標舷別為左舷, 魚雷旋回方向為左旋搜索, 魚雷戰斗載荷水下旋回方向計算公式
火箭助飛魚雷的落點坐標為最新目標位置坐標, 即
反潛武器系統在火箭助飛魚雷發射前將解算出的魚雷旋回方向和落點坐標作為射擊諸元裝訂至火箭助飛魚雷。
3.2 目標舷別無法計算條件下的射擊數學模型
在無法準確判斷出目標舷別的條件下, 根據戰斗載荷默認的水下旋回方向, 火箭助飛魚雷的落點位置向反方向修正。根據戰斗載荷的水下旋回半徑、魚雷水下航速和目標估計逃逸速度確定修正距離
修正后魚雷落點坐標
反潛武器系統在火箭助飛魚雷發射前將魚雷默認旋回方向和修正后的落點坐標作為射擊諸元裝訂至火箭助飛魚雷。
3.3 雙雷齊射射擊數學模型
為了提高作戰效能, 火箭助飛魚雷可采用雙雷齊射方式打擊目標。當采用雙雷齊射打擊目標時, 根據傳感器的探測誤差散布來確定2條火箭助飛魚雷戰斗載荷水下搜索覆蓋區域分配。傳感器的探測誤差散布一般可近似為矩形區域, 2條火箭助飛魚雷的落點應分布在矩形短軸的兩側, 使用時應當根據對目標探測的誤差來確定。雙雷齊射時的魚雷落點分布如圖1所示。
圖1 火箭助飛魚雷雙雷齊射落點分布示意圖
圖1中:1區域為由探測平臺提供目標信息, 魚雷搜索區域完全覆蓋目標散布區域的情況示意;2區域為發射艦提供目標信息, 魚雷搜索區域不能完全覆蓋目標散布區域的情況示意。
進一步還需要考慮從火箭助飛魚雷發射到入水期間目標的水下逃逸距離, 因此兩雷的水下搜索區域應盡量覆蓋目標的逃逸范圍。實際使用中應根據對目標運動的估計來確定目標散布區域, 進而選擇相應的齊射射擊方法。如圖2所示。
圖2 火箭助飛魚雷雙雷齊射落點示意圖
根據魚雷的水下旋回方向和落點間距大小可分為3種雙雷齊射方式: 大間距入水搜索相向搜索方式、中距入水同向搜索方式以及小間距入水背向搜索方式。
1) 在可以判明目標舷別的條件下, 采取中距入水同向搜索方式實施雙雷齊射, 魚雷搜索方向如圖3所示。
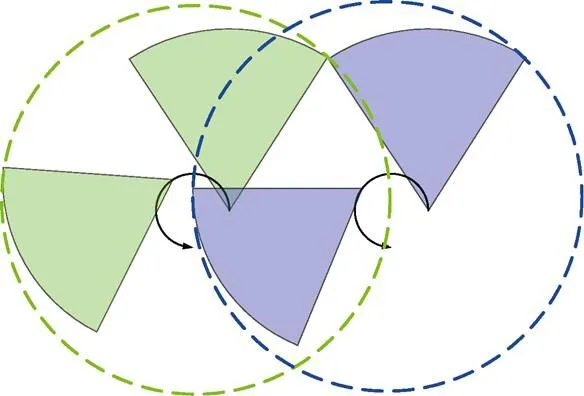
圖3 雙雷齊射中距入水同向搜索
根據戰斗載荷的自導作用距離確定雙雷沿目標方位線正橫方向的落點距離
則魚雷旋回方向
落點坐標
2) 在近距離緊急遭遇目標的條件下, 采取小間距背向搜索方式實施雙雷齊射, 魚雷搜索方向如圖4所示。
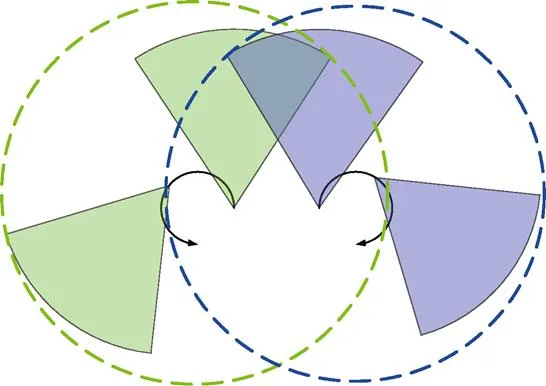
圖4 雙雷齊射小間距入水背向搜索
根據戰斗載荷的自導作用距離及旋回半徑確定魚雷旋回搜索半徑
根據傳感器探測誤差散布、目標估計逃逸速度及目標逃逸時間確定目標逃逸范圍
根據目標逃逸范圍和魚雷旋回搜索半徑確定雙雷沿目標方位線正橫方向的落點距離
則魚雷旋回方向
3) 在不能判明目標舷別的條件下, 采取大間距相向搜索方式實施雙雷齊射, 魚雷搜索方向如圖5所示。
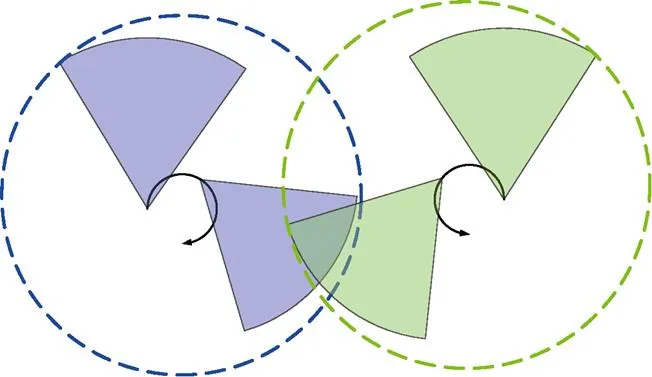
圖5 雙雷齊射大間距入水相向搜索
根據戰斗載荷的自導作用距離及旋回半徑確定魚雷旋回搜索半徑, 根據傳感器探測誤差散布、目標估計逃逸速度及目標逃逸時間確定目標逃逸范圍, 根據目標逃逸范圍和魚雷旋回搜索半徑確定雙雷沿目標方位線正橫方向的落點距離
則魚雷旋回方向
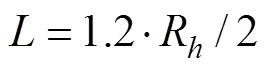
此外, 如果2條火箭助飛魚雷在雙雷齊射時存在互相干擾的情況或可能性時, 應該盡量保證兩雷在水下搜索時, 一雷不出現在另一雷的搜索扇面內, 則雙雷落點間距應滿足
4 仿真分析
以中型潛艇作為典型目標, 火箭助飛魚雷使用美國阿斯洛克反潛導彈, 戰斗載荷為MK 46 Mod 5輕型魚雷, 采用蒙特卡羅法開展仿真分析[9]。仿真試驗主要參數如表1所示[10-11]。
作戰效能計算方法: 在1 000次模擬打靶過程中, 魚雷自導發現目標的次數/1 000。
火箭助飛魚雷采用現在點射擊時, 由于目標在水下可向任意方向機動, 經仿真試驗發現, 其
表1 仿真參數表
作戰效能受目標舷角影響較大。受目標逃逸的影響, 在一半舷角范圍內(0~180°)作戰效能較高, 而在另一半舷角范圍內下降明顯, 如圖6所示。
圖6 現在點攻擊作戰效能與目標舷角關系圖
采用目標舷別判斷之后, 對于作戰效能下降明顯的舷角范圍, 由于提前根據解算出的目標舷角設定了魚雷的旋回方向, 其作戰效能在目標舷角范圍內均有明顯的提高, 彌補了原方法的不足, 如圖7所示。
針對20~32 km不同距離上的目標采用2種方法進行仿真分析, 基于目標舷別判斷的火箭助飛魚雷射擊方法可以有效提高火箭助飛魚雷打擊遠距離高速目標的發現概率, 采用該方法后將比原現在點射擊方法提高10%~20%的作戰效能, 如圖8所示。
圖7 判斷目標舷別現在點攻擊作戰效能與目標舷角關系
Fig 7 Relationship between operational effectiveness of shooting present position based on target board judgment and target board angle
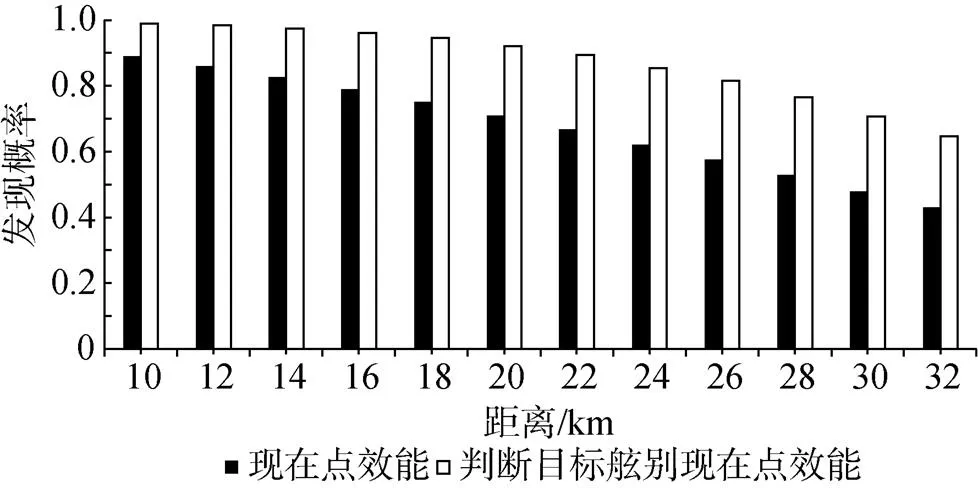
圖8 不同距離條件下2種方法作戰效能對比
5 結束語
通過對火箭助飛魚雷反潛作戰特點和水下彈道特點分析, 提出了一種基于目標舷別判斷的火箭助飛魚雷射擊方法, 一般只需2~3個聲吶周期即可判斷出目標舷別, 從而確定魚雷戰斗載荷水下旋回方向。同時對無法判斷目標舷別時的射擊瞄準,根據戰斗載荷水下彈道特性和對目標逃逸范圍進行落點人工散布修正。文中基于該方法建立了完整的現在點單雷射擊模型和3種雙雷齊射射擊模型, 無論是否可判明目標舷別均可適用。該射擊方法為火箭助飛魚雷快速攻潛的作戰應用和指揮決策提供了理論依據。在此基礎上開展基于不超過5個聲吶周期的目標概略位置射擊方法研究將是下一步的研究方向。
[1] 邢文華, 反潛武器的作戰應用[M]. 北京: 船舶系統工程部, 2000.
[2] 趙正業, 潛艇火控原理[M]. 北京: 國防工業出版社, 2003.
[3] 陳冬科, 徐瑜. 單雷射擊條件下反潛魚雷移出點射擊法研究[J]. 艦船科學技術, 2013, 35(11): 132-136.Chen Dong-ke, Xu Yu. Research on Shift Point Shooting by Single Shoot for Antisubmarine Torpedo[J]. Ship Science and Technology, 2013, 35(11): 132-136.
[4] 周圣林, 屈也頻. 魚雷火控系統射擊提前點的模型研究[J]. 魚雷技術, 1998, (3): 39-43.
[5] 李文哲, 張宇文, 時進發, 等. 火箭深彈人工散布射擊方法[J]. 火力與指揮控制, 2009, 34(4): 85-87.Li Wen-zhe, Zhang Yu-wen, Shi Jin-fa, et al. Research on Firing Methods of Rocket Depth-charge Artificial Scatter[J]. Fire Control Command Control, 2009, 34(4): 85-87.
[6] 李本昌, 李長文. 預定相遇態勢的潛射魚雷射擊及其技術方法[J]. 指揮控制與仿真, 2013, 35(2): 5-8.Li Ben-chang, Li Chang-wen. Firing and Technical Method Base on Given Meeting Situation of Sub-launched Torpedo[J]. Command Control & Simulation, 2013, 35(2): 5-8.
[7] 梁良, 賈躍, 任磊. 飛航式助飛魚雷無指令修正時反潛射擊方法研究[J]. 魚雷技術, 2014, 22(8): 293-297.Liang Liang, Jia Yue, Ren Lei. Anti-submarine Shooting Methods of Cruise Assisted Torpedo without Instruction Correction[J]. Torpedo Technology, 2014, 22(8): 293-297.
[8] 楊小小, 初磊, 丁雪泳. 美增程導型反潛導彈攻潛能力研究[J]. 戰術導彈技術, 2013(5): 40-44.Yang Xiao-xiao, Chu Lei, Yu Xue-yong. Study of Attacking Submarine of US ASROC VLA-ER[J]. Tactical Missile Technology, 2013(5): 40-44.
[9] 孟慶玉, 張靜遠, 宋保維. 魚雷作戰效能分析[M]. 北京: 國防工業出版社, 2003.
[10] Malcolm F. ASROC RUR-5A/RUM-139A/VLA/VLAAS /VLA-ER[R]. Jane’s Naval Weapon Systems ISSUE 52-2010. UK: IHS Jane’s, 2010.
[11] Valerio S J. Probability of Kill for VLA ASROC Torpedo Launch[D]. Monterey, California: Naval Postgraduate School, 2009.
Shooting Method of Rocket-Assisted Torpedo Based on Target Board Judgment
ZHAO Ai-qi1, WANG Ge2, SUN Jian1, GAO Tian1, JIANG Li-wei1
(1. Systems Engineering Research Institute, Beijing 100094, China; 2. Military Office of the PLA Navy in Beijing, Beijing 100094, China)
Based on the characteristics analysis of the anti-submarine operation and underwater trajectory of rocket-assisted torpedo, the conventional method for shooting target’s present position is improved and optimized. The judgment of the target board is used to determine the underwater search mode of the military load and offset aiming of the water-entry point. And then the shooting data of rocket-assisted torpedo is determined. Mathematical shooting models of single rocket-assisted torpedo and two rocket-assisted torpedoes salvo are established. Simulation analysis on the anti-submarine operational effectiveness is carried out by using this method, and the results show that this method can effectively improve the anti-submarine operational effectiveness of rocket-assisted torpedo, especially improve the effect of hitting long-range and high-speed maneuvering targets.
rocket-assisted torpedo; target board; shooting method; operational effectiveness
TJ631.8; E843
A
2096-3920(2019)04-0446-06
10.11993/j.issn.2096-3920.2019.04.013
趙艾奇, 王戈, 孫建, 等. 基于目標舷別判斷的火箭助飛魚雷射擊方法[J]. 水下無人系統學報, 2019, 27(4): 446-451.
2019-03-01;
2019-04-07.
趙艾奇(1978-), 男,高級工程師, 主要研究方向為反潛武器裝備及其作戰使用.
(責任編輯: 許 妍)
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56