半實(shí)物仿真檔位機(jī)構(gòu)在模擬訓(xùn)練系統(tǒng)中的應(yīng)用
2019-08-27 03:47:12解志紅劉小軍游小嘉楊似瓊
火力與指揮控制 2019年7期
解志紅,趙 剛,劉小軍,游小嘉,張 義,楊似瓊
(北方自動(dòng)控制技術(shù)研究所,太原030006)
0 引言
部隊(duì)對模擬訓(xùn)練系統(tǒng)裝備在質(zhì)與量的需求上逐步升級,訓(xùn)練強(qiáng)度也逐步加大,對模擬訓(xùn)練裝備的真實(shí)度,模擬裝備電氣化、信息化的要求越來越高[1-2]。目前模擬設(shè)備在實(shí)訓(xùn)仿真性能真實(shí)度和信息化等方面,均已無法滿足部隊(duì)需求。其模訓(xùn)設(shè)備只能進(jìn)行基本操作技能訓(xùn)練,對駕駛員作出簡單的動(dòng)作,既無法感受裝備的實(shí)際操作性能,也無法感知由于路面、天氣、時(shí)間等因素對車輛帶來的影響,實(shí)訓(xùn)真實(shí)度差,且由于缺少電氣和信息化功能接口,更無法實(shí)現(xiàn)與計(jì)算機(jī)聯(lián)網(wǎng)及體驗(yàn)視景系統(tǒng)驅(qū)動(dòng)下強(qiáng)烈的沉浸式感知戰(zhàn)場環(huán)境[3]。如采取實(shí)裝訓(xùn)練方式,基于裝備使用壽命、完好率等要求,無法保證訓(xùn)練時(shí)效問題,尤其在生疏地形和極端氣候條件下進(jìn)行駕駛訓(xùn)練的實(shí)踐機(jī)會較少,并且對實(shí)裝的損耗較大[4]。因此,部隊(duì)實(shí)訓(xùn)中,對高真實(shí)度、高信息化程度的新型模擬作訓(xùn)裝備的需求迫切。
本文研究的檔位機(jī)構(gòu)是各種駕駛艙模擬系統(tǒng)中的重要組成部分,是實(shí)現(xiàn)模擬仿真訓(xùn)練的必要裝備。本文主要開展了某型模擬檔位機(jī)構(gòu)的設(shè)計(jì)研究,并針對該型模擬訓(xùn)練裝置的通用技術(shù)要求、訓(xùn)練真實(shí)度、裝置的應(yīng)用性,以及模擬動(dòng)作的具體實(shí)現(xiàn)進(jìn)行分析。
1 模擬訓(xùn)練裝置的通用技術(shù)要求
模擬訓(xùn)練裝置需要復(fù)現(xiàn)實(shí)際裝備的操作特性,實(shí)現(xiàn)每一個(gè)操作動(dòng)作與實(shí)裝的一致性,操作方式、操作力感等需與實(shí)際裝備保持高度一致,才能實(shí)現(xiàn)模擬訓(xùn)練對實(shí)際訓(xùn)練的高效仿真[5-7]。該模擬訓(xùn)練裝置將每一個(gè)動(dòng)作轉(zhuǎn)化為可測量的電氣信號,并使用電信號驅(qū)動(dòng)視景系統(tǒng),實(shí)現(xiàn)操作動(dòng)作與視景動(dòng)作的閉環(huán)控制。訓(xùn)練裝置應(yīng)占用最小的操作空間,實(shí)現(xiàn)模擬檔位機(jī)構(gòu)的特有性能。其操作靈活,使用方便,安全可靠等指標(biāo)也是模擬訓(xùn)練裝備必備的技術(shù)要求。
1.1 訓(xùn)練真實(shí)度的要求
訓(xùn)練真實(shí)度是模擬裝置的必要條件,需要保證操作力感、操作動(dòng)作、操作習(xí)慣、操作時(shí)間等參數(shù)必須正確、規(guī)范,與實(shí)際的裝置一致。在操作動(dòng)作、操作感受實(shí)現(xiàn)中,不可能使用實(shí)裝的機(jī)構(gòu),必須進(jìn)行機(jī)構(gòu)轉(zhuǎn)化,既要真實(shí)的復(fù)現(xiàn)操作動(dòng)作,又需具備將操作動(dòng)作轉(zhuǎn)化為可測量參數(shù)的條件。
1.2 模擬裝置信息化的要求
在整體外形、交互方式與實(shí)裝保持一致的基礎(chǔ)上,模擬裝置具有將實(shí)際操作動(dòng)作轉(zhuǎn)變?yōu)殡姎庑盘柕墓δ埽畔?shí)時(shí)傳遞,可以實(shí)現(xiàn)電氣化與信息化。模擬訓(xùn)練裝置的電氣化將訓(xùn)練動(dòng)作轉(zhuǎn)化為可測量的角度信號、位移信號,通過加裝電位計(jì)、編碼器、接近開關(guān)、按鈕開關(guān)等測量器件,將動(dòng)作轉(zhuǎn)化為電氣信號參數(shù)輸出。在模擬裝置中,具備可采集的電氣化的參數(shù)和輸出接口,可以實(shí)現(xiàn)模擬裝置的信息化和網(wǎng)絡(luò)化[8]。
2 檔位機(jī)構(gòu)的新穎性與應(yīng)用性分析
2.1 新穎性分析
本文研究的檔位機(jī)構(gòu)新穎性強(qiáng),它通過機(jī)械傳動(dòng)和軟件處理將檔位交變轉(zhuǎn)換為電信號輸出,實(shí)現(xiàn)了模擬駕駛艙狹小空間內(nèi)的仿真模擬訓(xùn)練,并實(shí)時(shí)反應(yīng)于視景計(jì)算機(jī)上,達(dá)到模擬實(shí)裝的訓(xùn)練目的。該檔位機(jī)構(gòu)在陸軍戰(zhàn)術(shù)對抗仿真及裝備效能評估系統(tǒng)模擬器等多型模擬裝置中通用[9]。
2.2 創(chuàng)造性分析
該檔位機(jī)構(gòu)應(yīng)用左右、前后兩垂直軸的機(jī)械聯(lián)動(dòng)原理,使駕駛員能夠左右移動(dòng)、前后推拉進(jìn)行換擋動(dòng)作訓(xùn)練。該機(jī)構(gòu)在自動(dòng)檔位時(shí)具有鎖緊功能,通過拉銷組合方式進(jìn)行鎖定或解除,打破了調(diào)心軸承方式的小范圍轉(zhuǎn)動(dòng),實(shí)現(xiàn)了大范圍內(nèi)的多個(gè)檔位的交替變換。
2.3 實(shí)用性分析
該檔位機(jī)構(gòu)適用于模擬訓(xùn)練系統(tǒng)駕駛艙的多種檔位模擬機(jī)構(gòu),檔位設(shè)置為“川”字分布以8檔位為主要研究對象,但是可以通過適當(dāng)調(diào)整實(shí)現(xiàn)5檔、7檔等多功能調(diào)節(jié)檔位的變化,可應(yīng)用于多種型號的模擬訓(xùn)練系統(tǒng)中[10]。
3 模擬檔位機(jī)構(gòu)的設(shè)計(jì)研究
某型模擬檔位機(jī)構(gòu)共有8個(gè)檔位,分自動(dòng)擋和手動(dòng)擋兩種操作方式。如何實(shí)現(xiàn)操作的真實(shí)模擬和高電氣化程度難度較大。本文研究的模擬檔位機(jī)構(gòu)主要通過對實(shí)際裝備的功能分割和機(jī)構(gòu)轉(zhuǎn)化,完成模擬檔位機(jī)構(gòu)的設(shè)計(jì)與功能實(shí)現(xiàn)。將外觀、操作部件與實(shí)裝保持一致,操作方式、操作力感等參數(shù)通過機(jī)構(gòu)轉(zhuǎn)化,實(shí)現(xiàn)操作動(dòng)作復(fù)現(xiàn)。機(jī)構(gòu)轉(zhuǎn)化中,既有實(shí)際的操作動(dòng)作,又同時(shí)將動(dòng)作轉(zhuǎn)化為電氣信號參數(shù)。為了保證戰(zhàn)術(shù)仿真訓(xùn)練的真實(shí)度,模擬裝置的操作力感、操作動(dòng)作、操作習(xí)慣、操作時(shí)間等參數(shù)必須正確、規(guī)范,與實(shí)際的裝置一致。在整體外形、交互方式等與實(shí)裝保持一致的基礎(chǔ)上,實(shí)現(xiàn)了信息實(shí)時(shí)傳遞,實(shí)現(xiàn)對應(yīng)實(shí)裝機(jī)構(gòu)的模擬功能。將實(shí)際的操作動(dòng)作轉(zhuǎn)變?yōu)殡姎庑盘枺?qū)動(dòng)視景系統(tǒng)完成相應(yīng)轉(zhuǎn)變,完成訓(xùn)練模擬。
模擬檔位機(jī)構(gòu)不僅保持了實(shí)際裝備的外觀特征,還在操作方式上與實(shí)裝保持高度一致。其操作動(dòng)作直接反饋為數(shù)字信號,不但實(shí)現(xiàn)了模擬訓(xùn)練裝置的信息化,而且與視景系統(tǒng)進(jìn)行信息交互,提供了各種地形條件和氣候環(huán)境,搭建了駕駛員與車輛運(yùn)動(dòng)情景的感官交流平臺,形成一種人在路上的訓(xùn)練模式,更好地完成了包含車長、炮長等乘員的配合性訓(xùn)練,最終達(dá)到仿真訓(xùn)練的目的[11]。
3.1 操作動(dòng)作一致性的實(shí)現(xiàn)
通過對實(shí)際裝備的功能分割,保留部分操作部件,復(fù)現(xiàn)了實(shí)際裝置的所有操作參數(shù),并將相應(yīng)的操作參數(shù)轉(zhuǎn)化為可以測量的轉(zhuǎn)動(dòng)角度信號。在模擬機(jī)構(gòu)中,采用將檔位操作動(dòng)作,轉(zhuǎn)變?yōu)榭蓽y量的轉(zhuǎn)動(dòng)角度信號;圓柱齒輪與扇形齒弧組成轉(zhuǎn)動(dòng)副,將檔位前后推拉的動(dòng)作轉(zhuǎn)化為轉(zhuǎn)動(dòng)動(dòng)作,轉(zhuǎn)動(dòng)件與電位計(jì)連接,實(shí)現(xiàn)動(dòng)作的電氣化轉(zhuǎn)化。將相應(yīng)的電氣信號參數(shù)匹配操作動(dòng)作,從而完成模擬環(huán)境下操作訓(xùn)練。
3.1.1外觀與操作動(dòng)作一致性設(shè)計(jì)
該檔位機(jī)構(gòu)操控運(yùn)動(dòng)軌跡呈“川”字分布,即“Pt”檔置中,自動(dòng)檔位置左,手動(dòng)檔位置右,利用雙軸傳動(dòng)、彈簧銷定位、拉銷鎖緊等方式實(shí)現(xiàn)了操作手柄沿著左右、前后雙自由度的擺動(dòng)軌跡。如圖1~圖3所示,實(shí)現(xiàn)了手自一體包括D、H、N、R1、R2、Pt、“+”、“-”共8個(gè)檔位的檔位轉(zhuǎn)換。同時(shí),通過按壓或松開拉銷組合加力板對轉(zhuǎn)軸進(jìn)行即時(shí)解除或鎖定,使檔位模擬機(jī)構(gòu)在每一個(gè)自動(dòng)檔位都能夠保持鎖定功能,提高了操作的安全性和機(jī)構(gòu)的可靠性。
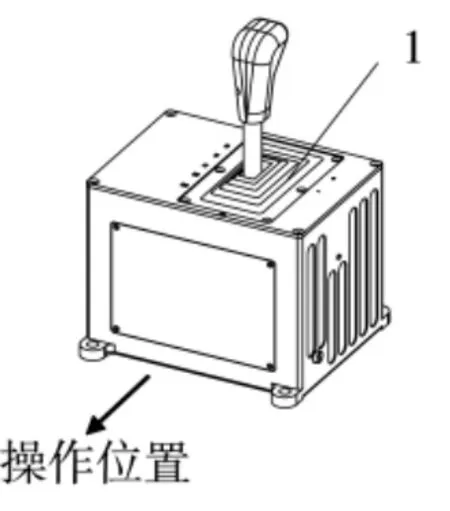
圖1 外形示意圖1
3.1.2操作機(jī)構(gòu)的轉(zhuǎn)化設(shè)計(jì)
該檔位機(jī)構(gòu)應(yīng)用左右、前后兩垂直軸的機(jī)械聯(lián)動(dòng)原理,使駕駛員能夠左右移動(dòng)、前后推拉進(jìn)行換擋動(dòng)作訓(xùn)練。該機(jī)構(gòu)在自動(dòng)檔位時(shí)具有鎖緊功能,通過拉銷組合方式進(jìn)行鎖定或解除,打破了調(diào)心軸承方式的小范圍轉(zhuǎn)動(dòng),實(shí)現(xiàn)了大范圍內(nèi)的多個(gè)檔位的交替變換。
底座(13)固定于基體(5)底部,左右轉(zhuǎn)軸系(12)通過軸承支撐于底座(13)上。左右轉(zhuǎn)軸(12)滿足內(nèi)環(huán)機(jī)構(gòu)(7)的左右轉(zhuǎn)動(dòng),即滿足駕駛員在自動(dòng)檔區(qū)域、手動(dòng)檔區(qū)域、Pt檔區(qū)域之間的切換要求;手柄桿(上)(15)、手柄桿(下)(16)與前后轉(zhuǎn)軸(17)固定。前后轉(zhuǎn)軸(17)的轉(zhuǎn)動(dòng)性能滿足機(jī)構(gòu)在自動(dòng)檔區(qū)域的D檔、H檔、N檔、R1檔、R2檔之間的切換或在手動(dòng)檔區(qū)域的“+”“-”檔間的切換;前后轉(zhuǎn)軸左側(cè)安裝大齒輪(22)和鎖定座(18)。大齒輪(22)與其下方小齒輪(23)嚙合,小齒輪與電位計(jì)同軸固聯(lián)。手柄轉(zhuǎn)動(dòng)時(shí)帶動(dòng)電位計(jì)工作,并采集數(shù)據(jù);前后轉(zhuǎn)軸(17)右側(cè)安裝有撥銷1(8)、撥銷2(9);檔位板(3)固定于基體(5)上方,檔位板上的“川”型區(qū)域限定了機(jī)構(gòu)在指定的范圍內(nèi)運(yùn)動(dòng),如圖4~圖6所示。
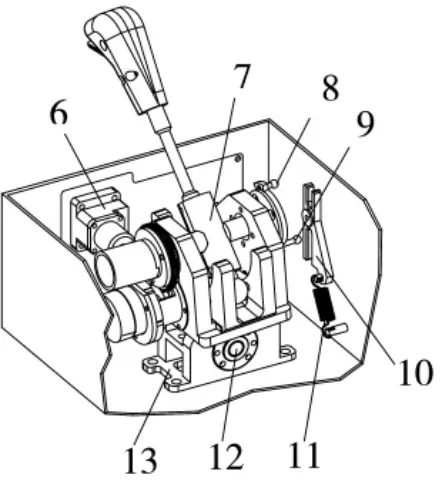
圖4 內(nèi)部組成圖
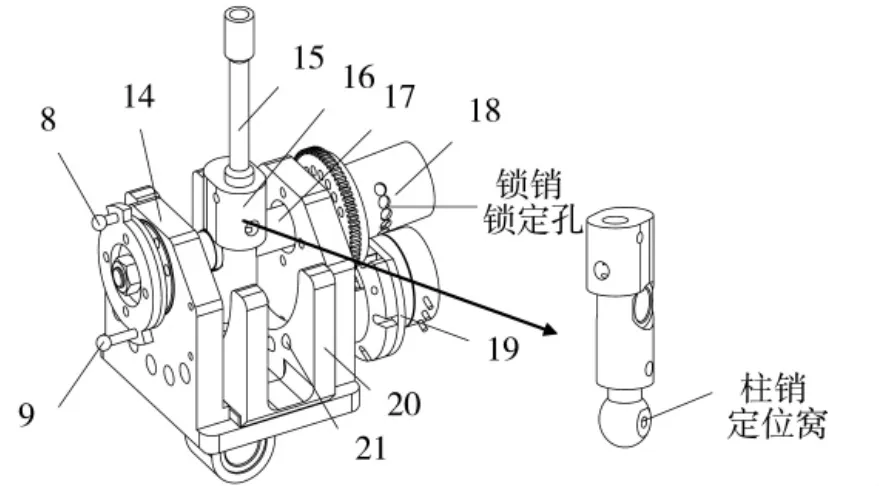
圖5 內(nèi)環(huán)機(jī)構(gòu)結(jié)構(gòu)圖1
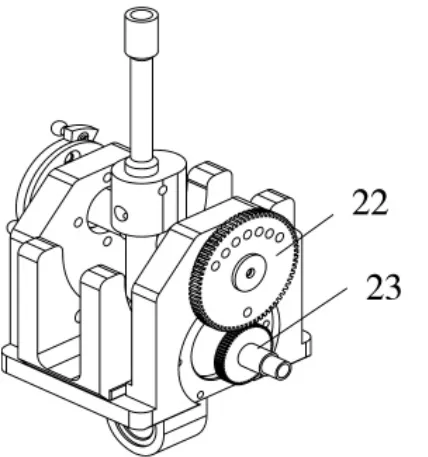
圖6 內(nèi)環(huán)機(jī)構(gòu)結(jié)構(gòu)圖2
3.2 模擬動(dòng)作電氣化的實(shí)現(xiàn)
底座(13)固定于基體(5)底部,左右轉(zhuǎn)軸系(12)通過軸承支撐于底座(13)上。左右轉(zhuǎn)軸(12)滿足內(nèi)環(huán)機(jī)構(gòu)(7)的左右轉(zhuǎn)動(dòng),即滿足駕駛員在自動(dòng)檔區(qū)域、手動(dòng)檔區(qū)域、Pt檔區(qū)域之間的切換要求;手柄桿(上)(15)、手柄桿(下)(16)與前后轉(zhuǎn)軸(17)固定。前后轉(zhuǎn)軸(17)的轉(zhuǎn)動(dòng)性能滿足機(jī)構(gòu)在自動(dòng)檔區(qū)域的D檔、H檔、N檔、R1檔、R2檔之間的切換或在手動(dòng)檔區(qū)域的“+”“-”檔間的切換;前后轉(zhuǎn)軸左側(cè)安裝大齒輪(22)和鎖定座(18)。大齒輪(22)與其下方小齒輪(23)嚙合,小齒輪與電位計(jì)同軸固聯(lián)。手柄轉(zhuǎn)動(dòng)時(shí)帶動(dòng)電位計(jì)工作,并采集數(shù)據(jù)。
4 模擬檔位裝置的功能驗(yàn)證
該模擬檔位裝置的功能驗(yàn)證參照圖4~圖6作如下敘述:
1)自動(dòng)檔區(qū)域內(nèi)的換擋操作:手握手柄,壓下加力板,帶動(dòng)鎖銷組合內(nèi)的剎車?yán)K(內(nèi))移動(dòng),拉動(dòng)鎖銷(26)脫離鎖定孔;繼續(xù)用力推拉手柄,待球彈簧柱銷(21)頭部滑出柱銷定位窩時(shí)將手柄推拉到所需檔位,到位后,球彈簧柱銷(21)頭隨即滑進(jìn)柱銷定位窩內(nèi)。松開手柄加力板,鎖銷(26)自動(dòng)進(jìn)入相應(yīng)鎖定孔內(nèi)。
2)切換到Pt檔的操作:將手柄置于N檔,向右移動(dòng)手柄,到達(dá)中間Pt區(qū)域,隨即,向后拉動(dòng)手柄,進(jìn)入Pt檔。
3)切換到手動(dòng)檔的操作:將手柄置于H檔,向右移動(dòng)手柄,到達(dá)手動(dòng)區(qū)域,隨即,向前推動(dòng)手柄一次,表示手動(dòng)“+”檔一次,松手,擺桿(10)在拉簧(11)的作用下,自動(dòng)回位,同時(shí)擺桿內(nèi)的撥銷1(8)、撥銷2(9)帶動(dòng)檔位恢復(fù)到手動(dòng)區(qū)域中央,向前繼續(xù)推動(dòng)手柄一次,此時(shí),累計(jì)“+”檔兩次,以此類推,或向后拉動(dòng)手柄進(jìn)入手動(dòng)“-”檔檔位,拉動(dòng)一次,“-”檔一次,以此類推。
5 結(jié)論
本文以某型模擬訓(xùn)練用檔位機(jī)構(gòu)的設(shè)計(jì)研究為出發(fā)點(diǎn),分析了模擬訓(xùn)練裝置的通用設(shè)計(jì)要求,在模擬真實(shí)度和電氣化實(shí)現(xiàn)兩方面進(jìn)行半實(shí)物仿真模擬系統(tǒng)的研究與研發(fā),并驗(yàn)證了研究的可行性。本研究闡述了該檔位機(jī)構(gòu)的詳細(xì)設(shè)計(jì)與具體的操作,研究成果對強(qiáng)化部隊(duì)駕駛員的模擬訓(xùn)練具有重要意義[12]。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
動(dòng)漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級版(2016年28期)2017-06-03 00:28:49
作文評點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37