基于濾波器組的船舶靜電場跟蹤
2019-08-22 03:13:28顏冰孫寶全張伽偉
兵工學(xué)報(bào) 2019年7期
顏冰, 孫寶全,2, 張伽偉
(1.海軍工程大學(xué) 兵器工程學(xué)院, 湖北 武漢 430033; 2.92941部隊(duì), 遼寧 葫蘆島 125000)
0 引言
船舶靜態(tài)電場(SE)是船舶重要的信號源,目前相關(guān)學(xué)者對船舶電場建模已經(jīng)作了大量的研究,且有比較成熟的結(jié)論。根據(jù)船舶的電場模型,從船舶SE信號中可以反演出船舶的位置信息,可以用來對船舶進(jìn)行跟蹤定位[1-2]。相比于水聲信號,電場信號所受環(huán)境影響相對較小。利用船舶靜電場對船舶目標(biāo)進(jìn)行跟蹤定位可以作為水聲跟蹤定位的一個(gè)有效補(bǔ)充。利用船舶靜電場對目標(biāo)船舶進(jìn)行跟蹤主要應(yīng)用在水雷、水下預(yù)警系統(tǒng)中,由于此類裝備對功耗和計(jì)算資源有較高的要求,為此對濾波算法的復(fù)雜度也提出了較高的要求。相比于粒子濾波,卡爾曼濾波計(jì)算方法簡單,計(jì)算量小,更利于在水下武器中的工程化實(shí)現(xiàn)。以卡爾曼濾波為代表的濾波算法可以根據(jù)傳感器量測信息對目標(biāo)的相關(guān)參數(shù)進(jìn)行實(shí)時(shí)的估計(jì),在目標(biāo)跟蹤領(lǐng)域獲得越來越廣泛的應(yīng)用[3]。
與傳統(tǒng)的雷達(dá)跟蹤應(yīng)用不同,在船舶靜電場跟蹤中,其方位- 距離信息隱含于觀測信號之中,濾波跟蹤算法的先驗(yàn)信息是缺失的[4]。在非線性條件下,現(xiàn)有的濾波算法中不論是分布近似方法(粒子濾波類)還是矩近似方法(卡爾曼濾波類)均不能保證任意初值條件下的濾波收斂性,根本原因在于參與濾波更新的量是根據(jù)當(dāng)前一步預(yù)測狀態(tài),因此初值與真實(shí)值之間相差過大會導(dǎo)致濾波發(fā)散。解決先驗(yàn)信息缺失常用的方法是濾波器組[5-6]法,即采用一組濾波器,假設(shè)多個(gè)可能的初值,然后用一定的方法選擇出最優(yōu)結(jié)果。
本文將以漸進(jìn)更新擴(kuò)展卡爾曼濾波器(PUEKF)為最基本的濾波單元,引入基于最大似然選擇的濾波器組方法,解決船舶靜電場跟蹤中先驗(yàn)信息缺失的問題。
1 船舶SE跟蹤問題描述
船舶SE跟蹤問題的狀態(tài)空間模型[7]為
(1)
式中:xk為k時(shí)刻的n維狀態(tài)向量,xk∈n;yk為k時(shí)刻m維觀測向量,yk∈m;a為狀態(tài)轉(zhuǎn)移函數(shù),a:n→n;h為觀測函數(shù),h:n→m;wk-1為狀態(tài)噪聲向量,wk-1∈n,vk為觀測噪聲向量,vk∈m且wk-1~N(0,Qk-1)、vk~N(0,Rk),Qk-1為過程噪聲協(xié)方差矩陣,Rk為觀測噪聲協(xié)方差矩陣,{wk-1}和{vk}不相關(guān)。
1.1 觀測方程
采用水平電偶極子對船舶電場進(jìn)行建模;在空氣- 海水- 海床3層均勻介質(zhì)條件下,任意場點(diǎn)Pf處的電場信號[8]為
E=(Ex,Ey,Ez),
(2)
式中:Ex、Ey、Ez分別為
x、y、z為場點(diǎn)坐標(biāo),x0、y0、z0為場源位置坐標(biāo),px、py、pz分別為電偶極子電偶極矩p在3個(gè)坐標(biāo)軸上的分量值,η為海床反射系數(shù),η=(σs-σsb)/(σs+σsb),σs為海水電導(dǎo)率,σsb為海床電導(dǎo)率,D為海水深度,h為坐標(biāo)系原點(diǎn)深度,kr、mr為反射層數(shù),
r1kr=((x-x0)2+(y-y0)2+(z-2krD+z0-2h)2)1/2,
r2kr=((x-x0)2+(y-y0)2+(z-2krD-z0)2)1/2,
r1mr=((x-x0)2+(y-y0)2+(z+2mrD-z0)2)1/2,
r2mr=((x-x0)2+(y-y0)2+(z+2mrD+z0-2h)2)1/2.
在第ns(ns=1,2,…,Ns)個(gè)電場傳感器量測到的目標(biāo)信號可建模為
(3)

(4)
1.2 狀態(tài)方程
根據(jù)觀測方程定義k時(shí)刻船舶目標(biāo)狀態(tài)向量
(5)
式中:rk=[x,y,z]T;vk為目標(biāo)在k時(shí)刻的速度,vk=[vx,vy]T,vx、vy是速度在x軸、y軸分量,忽略z軸方向上的運(yùn)動。

2 基于最大似然選擇的濾波器組方法
2.1 基本原理
對于船舶SE跟蹤問題,由于不知道濾波起始時(shí)目標(biāo)的真實(shí)狀態(tài),濾波器組的基本思想便是假設(shè)目標(biāo)真值是(或接近)多個(gè)假設(shè)初值中的一個(gè),且概率相等,即
(6)


(7)

(8)
(9)
式中:
(10)
2.2 多初值模型參數(shù)確定
在全空間充滿電導(dǎo)率為σ的導(dǎo)體媒質(zhì)中,某場點(diǎn)處的電場模值為
(11)
由恒穩(wěn)電場的鏡像理論,在空氣- 海水- 海床3層介質(zhì)中,位于海水中的源在海水中產(chǎn)生的靜態(tài)電場等效為無限大海水區(qū)域中源及其通過兩個(gè)界面形成的無數(shù)個(gè)鏡像在場點(diǎn)處產(chǎn)生的電場疊加。鏡像的強(qiáng)度與源強(qiáng)度相同,只是與場點(diǎn)的距離發(fā)生變化。為此3層介質(zhì)中電場模值的計(jì)算可以在源強(qiáng)度中加一個(gè)修正系數(shù)mc,mc可取一個(gè)經(jīng)驗(yàn)值,與海水深度有關(guān),則
(12)
那么由此便可以根據(jù)電場強(qiáng)度模值估算距離為
(13)
對于目標(biāo)源強(qiáng)度,假設(shè)其分布在K個(gè)數(shù)量級上,在每個(gè)數(shù)量級上設(shè)置典型值。


(14)
式中:ψj為假設(shè)的目標(biāo)方位角;i=1,2,3;j=1,2,3,4.
(15)
2.3 漸進(jìn)更新擴(kuò)展卡爾曼濾波
PUEKF算法思想來源于漸進(jìn)貝葉斯理論[9-11],本質(zhì)在于逐步引入量測信息,關(guān)鍵在于重新設(shè)計(jì)擴(kuò)展卡爾曼濾波算法的量測更新步驟。PUEKF算法將時(shí)間間隔[tk-1,tk]劃分成Npu個(gè)子區(qū)間,而每個(gè)子區(qū)間的時(shí)間間隔為δλ=(tk-tk-1)/Npu,這相當(dāng)于在[tk-1,tk]內(nèi)插入Npu-1個(gè)偽時(shí)間序列,序貫獲得Npu個(gè)觀測值。觀測更新過程在每個(gè)子區(qū)間內(nèi)進(jìn)行一次。時(shí)間間隔變化,觀測噪聲協(xié)方差也會發(fā)生變化。

(16)
結(jié)合卡爾曼濾波的基本步驟,可得PUEKF算法步驟:
1)時(shí)間更新。
Pk|k-1=FPk-1|k-1FT+Qk-1,
k|k-1=Fk-1|k-1,
2)觀測更新。
②Foripu=1,2,…,Npu
Pipu=(I-KipuHipu-1)Pipu-1.
當(dāng)Npu=1時(shí),PUEKF退化為卡爾曼濾波。
綜上所述,可給出濾波器組跟蹤算法的步驟如下[13]:




(17)
5)對對數(shù)似然函數(shù)值進(jìn)行歸一化。
6)進(jìn)行下一時(shí)刻濾波或在規(guī)定時(shí)刻結(jié)束濾波。
3 仿真結(jié)果及分析
設(shè)計(jì)仿真實(shí)驗(yàn),以驗(yàn)證濾波器組方法在先驗(yàn)信息缺失條件下對船舶靜電場跟蹤的有效性。
電偶極子電偶極矩p=100 A·m;以傳感器陣列為基礎(chǔ)建立右手坐標(biāo)系,傳感器連線為y軸,傳感器中心點(diǎn)為坐標(biāo)原點(diǎn),x軸過原點(diǎn)垂直于y軸,z軸向上;選用兩個(gè)三軸電場傳感器,其位置為o1和o2,船舶的其他初始狀態(tài)如表1所示;此外,過程加速度噪聲強(qiáng)度σx=σy=0.100,α=0.001;觀測噪聲協(xié)方差矩陣Rk=σ2I2×2,σ=1×10-7.
對濾波器組進(jìn)行配置,假設(shè)目標(biāo)源強(qiáng)度分布在K=3個(gè)等級上,即p1=50 A·m,p2=100 A·m,p3=200 A·m. 在各個(gè)距離上起始NF=4個(gè)PUEKF濾波器,各個(gè)濾波器的假設(shè)方位分別為π/4 rad、3π/4 rad、5π/4 rad、7π/4 rad.
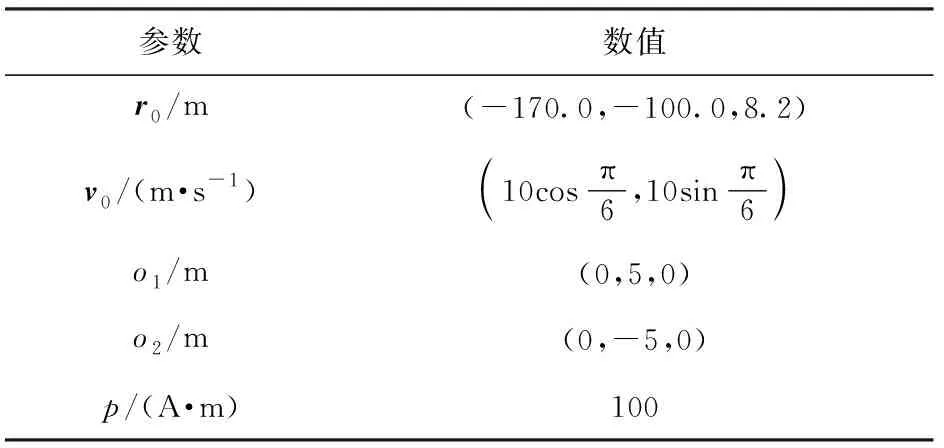
表1 仿真場景參數(shù)
選擇位置分量在k時(shí)刻總的均方根誤差TRMSEk作為衡量算法優(yōu)劣的標(biāo)準(zhǔn),其定義為

(18)
式中:MC為仿真次數(shù),MC=100;TN為跟蹤濾波過程總的迭代次數(shù);k為k時(shí)刻rk的后驗(yàn)估計(jì)值。
圖1為濾波器組的總均方根誤差,圖2為濾波器組的對數(shù)似然函數(shù)值,圖3為對數(shù)似然函數(shù)值最大的前3個(gè)濾波器(從大到小依次為7號、3號、11號)對應(yīng)的跟蹤結(jié)果。
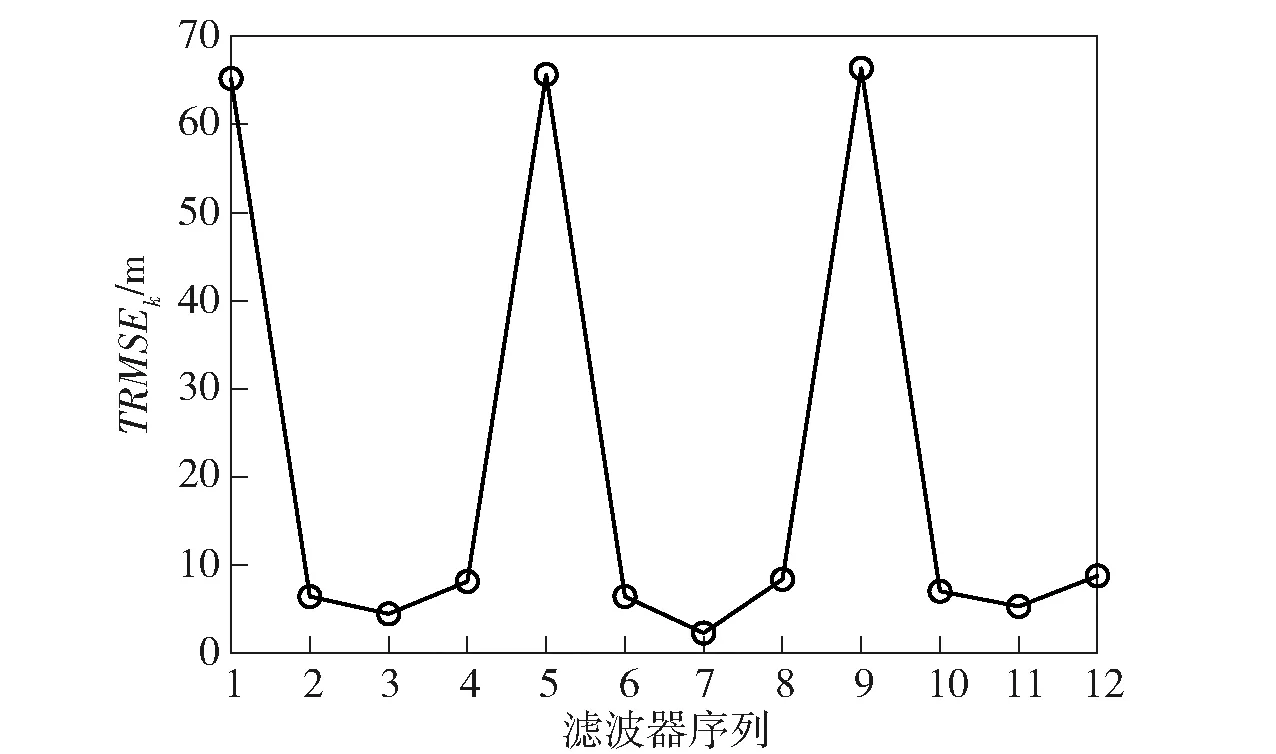
圖1 濾波器組的總均方根誤差Fig.1 Total root mean square errors of filter bank
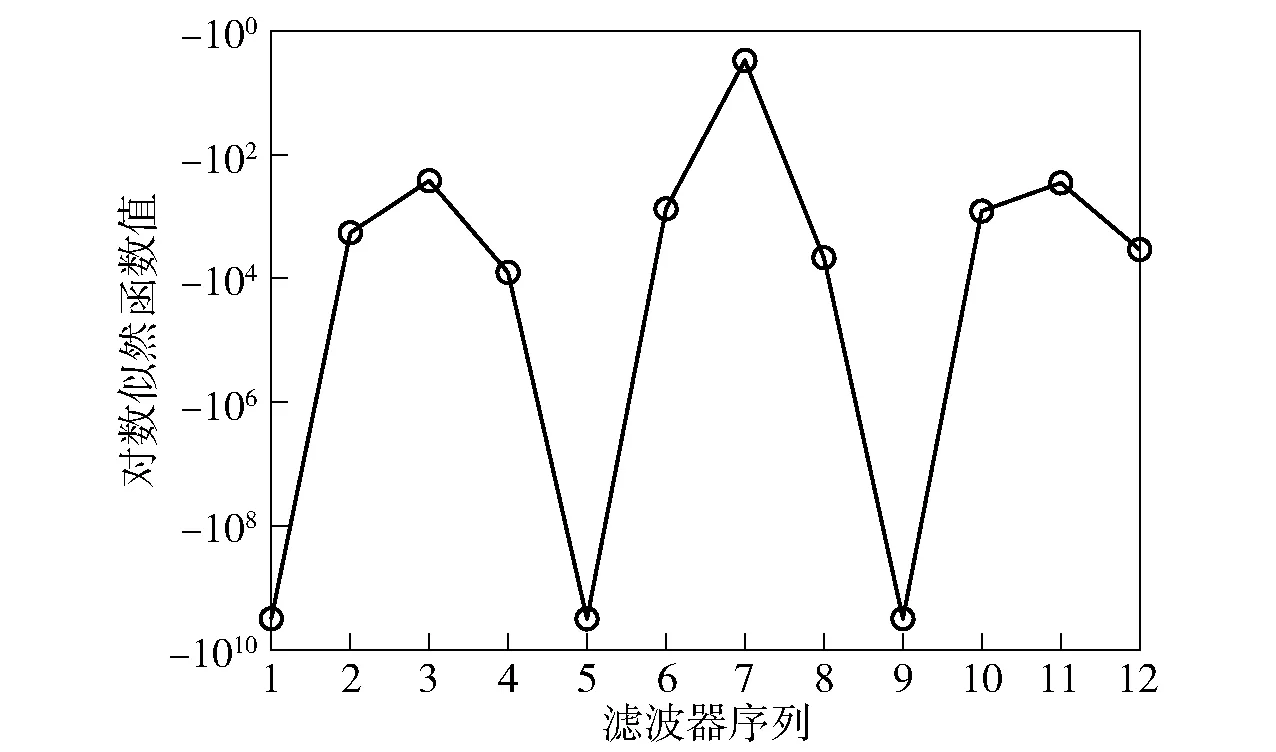
圖2 濾波器組的對數(shù)似然函數(shù)仿真值Fig.2 Simulated values of logarithmic likelihood function of filter bank

圖3 濾波器組跟蹤仿真結(jié)果Fig.3 Simulated results of filter bank tracking
同時(shí)可見,最大似然值對應(yīng)的初假設(shè)(7號濾波器)正是電偶極矩最接近真實(shí)情況的初值假設(shè),可以證明2.2節(jié)提出的初值確定方法是有效的。
4 實(shí)測實(shí)驗(yàn)
為驗(yàn)證上述理論,進(jìn)行了電偶極子跟蹤實(shí)測實(shí)驗(yàn)。
實(shí)驗(yàn)搭設(shè)兩套相同的電場測量裝置,電極采用Ag/AgCl電極,如圖4所示是其中一套電場傳感器,電極兩兩相對,取差分輸出得到電場測量值;利用自制的超低噪聲前置放大電路采集信號,利用數(shù)據(jù)記錄儀采集數(shù)據(jù)。利用全球定位系統(tǒng)(GPS)對模擬源軌跡進(jìn)行定位。

圖4 二軸電場傳感器Fig.4 Two-axis electric field sensor
以傳感器陣列為基準(zhǔn)建立右手坐標(biāo)系,傳感器陣列所在線為y軸,x軸垂直y軸指向其右側(cè),z軸向上。圖5為實(shí)驗(yàn)示意圖。海水深度8.4 m,海水電導(dǎo)率4.0 S/m,海床電導(dǎo)率0.4 S/m. 電場傳感器陣列中兩個(gè)傳感器距離為10.0 m. 模擬源由電流源和發(fā)射電極組成,電流源置于木船上,提供電流,經(jīng)發(fā)射電極輸入海水中,發(fā)射電極位于水深0.2 m處,兩個(gè)發(fā)射電極之間的距離為10.0 m,電流源輸出電流10.0 A. 真實(shí)軌跡是GPS數(shù)據(jù)經(jīng)WGS84地球坐標(biāo)系轉(zhuǎn)換成大地坐標(biāo)系,然后坐標(biāo)旋轉(zhuǎn)到傳感器坐標(biāo)系下得到,作為參考。模擬源起始位置約為(-57.1 m,-280.0 m),傳感器坐標(biāo)為(0 m,±5.0 m,0 m)。對濾波器組進(jìn)行配置,假設(shè)目標(biāo)源強(qiáng)度分布在K=3個(gè)等級上,即p1=50 A·m、p2=100 A·m、p3=200 A·m. 航向起始角設(shè)定為π/4 rad、3π/4 rad、5π/4 rad、7π/4 rad. 實(shí)驗(yàn)跟蹤效果如圖6~圖8所示。圖6為傳感器測得的電場信號(濾波后),圖7為濾波器組的對數(shù)似然函數(shù)值,圖8為對數(shù)似然函數(shù)值最大的前3個(gè)濾波器對應(yīng)的跟蹤結(jié)果。
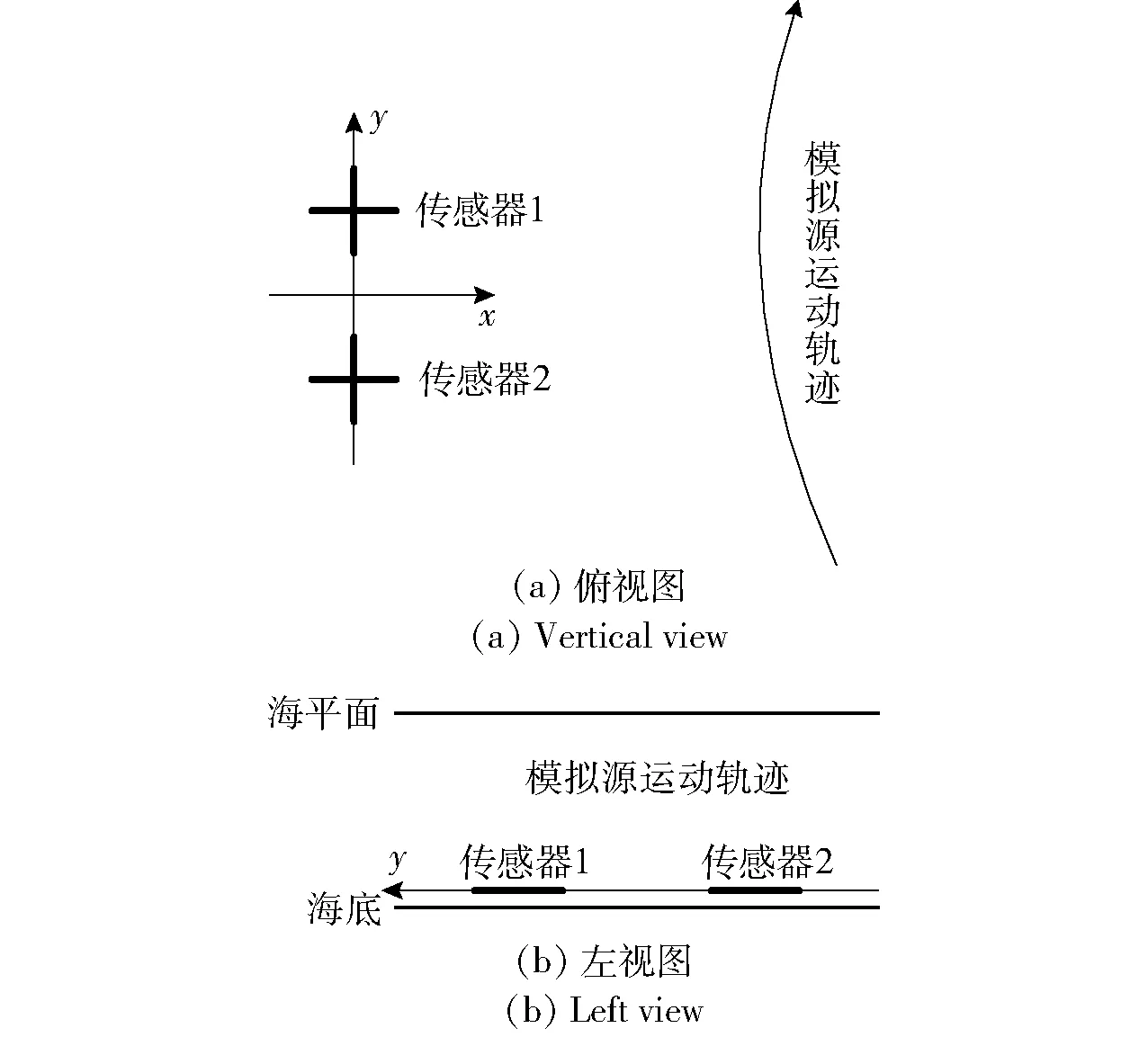
圖5 實(shí)驗(yàn)示意圖Fig.5 Experimental schematic diagram
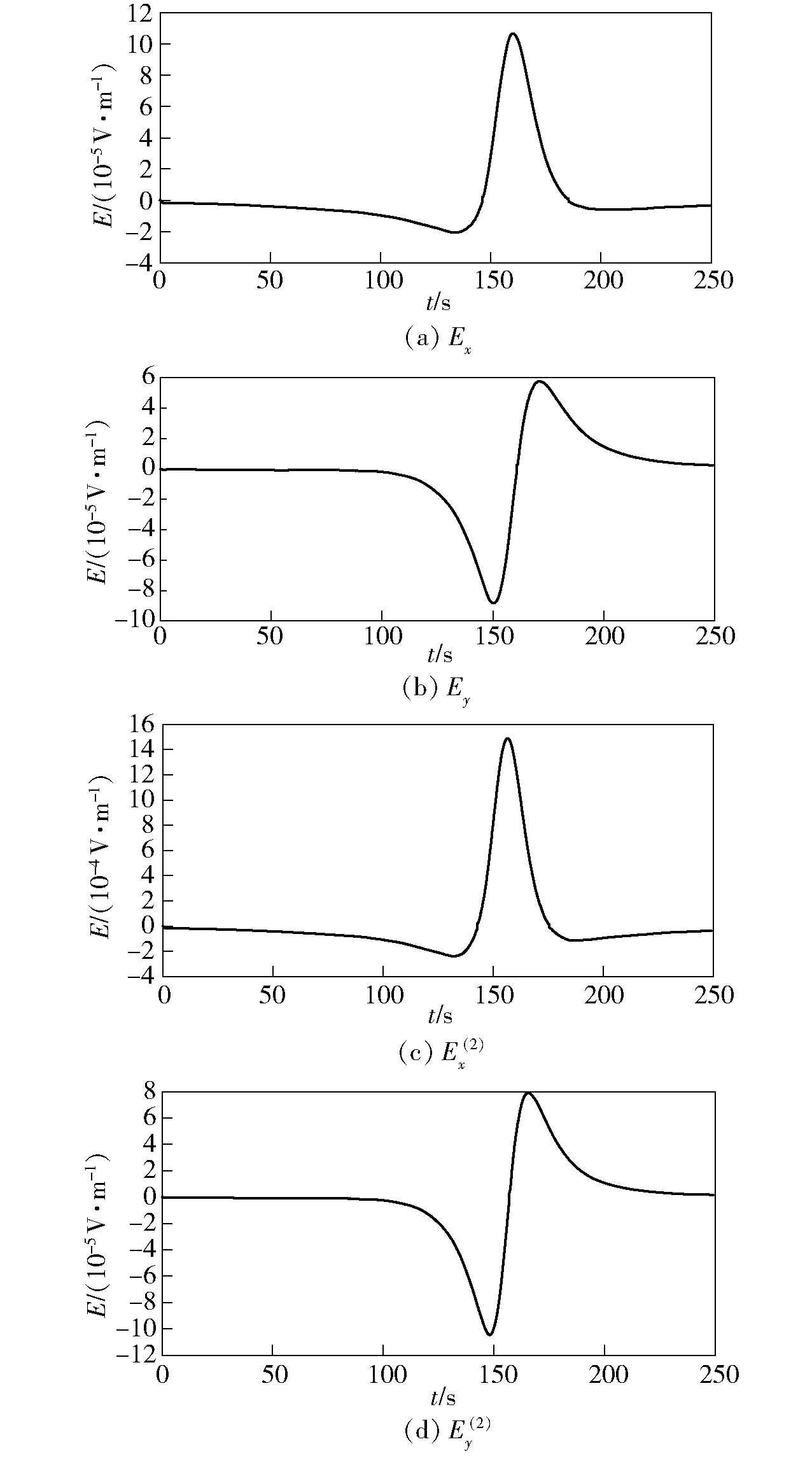
圖6 模擬源電場信號Fig.6 Electric field signal from analog source
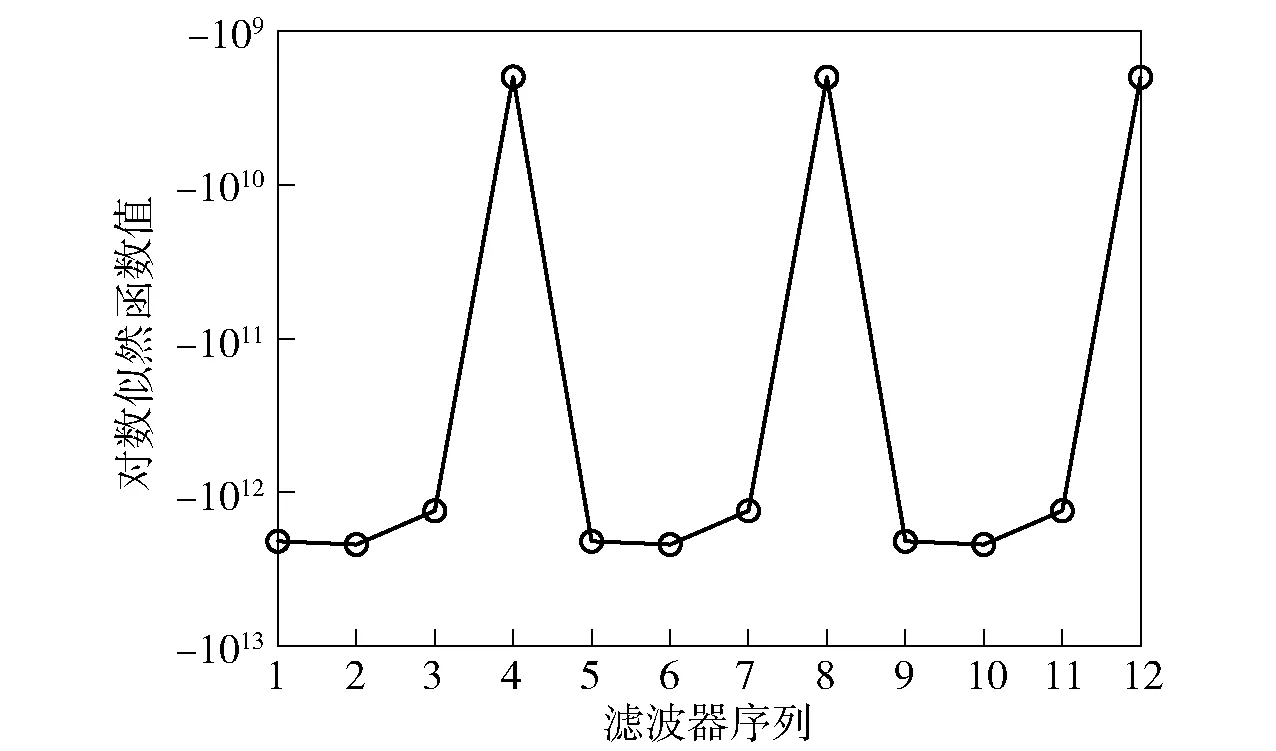
圖7 濾波器組的對數(shù)似然函數(shù)實(shí)驗(yàn)值Fig.7 Experimental value of logarithmic likelihood function of filter bank
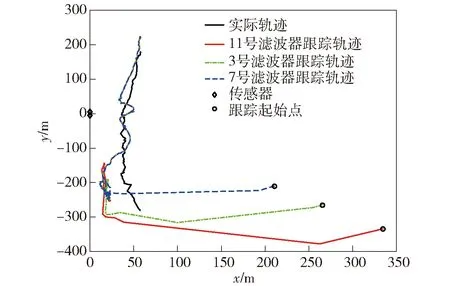
圖8 濾波器組跟蹤實(shí)驗(yàn)結(jié)果Fig.8 Experimental results of filter bank tracking
需要說明的是:
1)GPS定位精度相對較差,因此其記錄的軌跡有較大波動,相比于真實(shí)軌跡其記錄軌跡的位置坐標(biāo)誤差約在5 m左右;
2)漁船航行受浪影響較大,波動較大,因此模擬源運(yùn)動并非假設(shè)的勻速直線運(yùn)動,帶有一定的機(jī)動特性;
3)跟蹤軌跡無法與真實(shí)軌跡進(jìn)行對準(zhǔn),從而無法計(jì)算TRMSEk,但從圖8可以看出,跟蹤軌跡基本收斂在參考軌跡附近。
實(shí)驗(yàn)結(jié)果表明,濾波器組算法可以有效的解決先驗(yàn)信息缺失條件下的船舶靜電場跟蹤問題。
5 結(jié)論
利用船舶靜電場對船舶目標(biāo)進(jìn)行跟蹤定位可以作為水聲跟蹤定位的一個(gè)有效補(bǔ)充。本文用電偶極子對船舶進(jìn)行建模,建立船舶電場跟蹤的狀態(tài)空間模型,以漸進(jìn)更新擴(kuò)展卡爾曼濾波器為最基本的濾波單元,引入基于最大似然選擇的濾波器組方法,以解決船舶靜電場跟蹤中先驗(yàn)信息缺失的問題,然后通過仿真和海上實(shí)測實(shí)驗(yàn)對其進(jìn)行驗(yàn)證。仿真和海上實(shí)驗(yàn)結(jié)果均表明:濾波器組方法可以有效地解決先驗(yàn)信息缺失條件下的船舶靜電場跟蹤問題,最大似然選擇法能夠篩選出較優(yōu)的跟蹤軌跡;相比于距離,跟蹤誤差對方位先驗(yàn)信息更加敏感。本文首次進(jìn)行了海上電偶極子跟蹤實(shí)測實(shí)驗(yàn),在實(shí)測環(huán)境下對跟蹤濾波算法的有效性和船舶電場跟蹤的可行性進(jìn)行了驗(yàn)證,對船舶電場跟蹤的發(fā)展應(yīng)用具有一定的指導(dǎo)意義。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國船檢(2017年3期)2017-05-18 11:33:09
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36