雙電機獨立驅動電動賽車再生制動控制研究
2019-08-15 16:03:02任建平李剛石晶高青云
汽車實用技術 2019年15期
任建平,李剛,石晶,高青云
(遼寧工業大學 汽車與交通工程學院,遼寧 錦州 121001)
引言
汽車制動能量回收技術是當今電動汽車研究的重要話題之一,制動能量回收技術可以提高汽車的能源效率,增加汽車行駛里程,同時對促進汽車行業發展有重要意義[1]。目前,再生制動控制策略的研究主要針對理想制動力分配控制策略、制動力按固定比值分配控制策略、最優制動能量回收控制策略和并聯制動能量回收控制策略等4 種。如文獻[2]采用理想前后制動力分配策略設計了一種以制動強度z 和電池剩余電量為輸入、電機制動比例為輸出的模糊控制器,但其在低制動強度的情況下能量回收較少;文獻[3]提出對前后車輪制動力固定分配分配,基于模糊控制得到電液復合制動下再生制動的比例,但其只能在保證制動穩定性的前提下進行能量回收。文獻[4]在保證驅動輪制動力最大化并滿足ECE 法規的條件下完成了前后輪制動力分配,然后將電池剩余電量、制動強度和預估的機械制動效能因數引入模糊控制器,得到再生制動分配比例,但這種控制策略只能用于低附著系數路面。
基于上述文獻的不足及傳統的電動汽車與電動賽車一些結構設計及需求的不同,本文提出了一種改進了的電液復合制動的再生制動分配策略——雙電機獨立驅動電動賽車電液復合再生制動策略。在保證賽車制動穩定及控制方法的情況下,根據理想的前后制動力分配曲線、ECE 制動法規等條件下,計算理想制動力分配系數,從而獲得液壓制動與再生制動相作用的不同區間,采用邏輯門控制前后輪制動力盡可能接近理想的前后輪制動力分配曲線,保證制動穩定性,提高制動能量回收效率。
1 賽車再生制動系統工作原理
雙電機獨立驅動賽車后輪驅動,所以再生制動能量只在后輪被回收,后輪的制動力矩與電機產生的再生制動力矩的大小和后輪產生的摩擦力矩有關。當制動踏板行程增加后,液壓制動系統會按照合理的比例分配液壓力,整車制動器與電機控制協同工作,確定賽車在制動時所需要的制動力矩。雙電機獨立再生制動系統會按照當前電機狀態、電池荷電狀態與車輛當前行駛狀態計算出電機實際所需要的再生制動力的大小,將計算的再生制動力發送到電機控制器從而驅動電機實現制動,同時再生制動模塊回收的制動能量回饋于蓄電池組。再生制動控制邏輯圖如圖1:
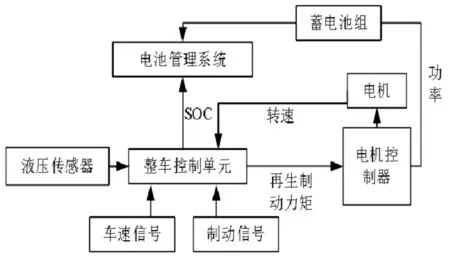
圖1 再生制動工作原理
2 并聯策略及其分析
2.1 并聯策略
并聯策略是保持賽車原有機械制動系統的基礎上,再生制動力矩是作用于驅動輪上的附加力矩。去的動輪上的再生制動力與傳統的摩擦制動力以固定的比例分配,該固定比例是車速或者賽車減速度得到函數。
2.2 再生制動力分配
考慮到賽車結構,我們設計了適合雙電機獨立驅動賽車的再生制動力分配策略,該策略在滿足制動穩定性的情況下,回收部分制動能量,提高賽車節能性。如圖為賽車前后輪制動力分配曲線圖。
當制動強度0<z≤0.7 時,采取電液復合再生制動方式進行制動,液壓制動按計算好的前后輪制動力分配系數進行分配,再生制動力對后輪制動力進行補償制動,使復合后的前后輪制動力按照理想的前后輪制動力進行分配.當制動強度z>0.7 時,是一種緊急工況,為了保證賽車在制動時的穩定性,采用液壓制動一種方式。
賽車采用邏輯門限值控制方法對電液復合再生制動策略進行控制,主要控制的有賽車的速度信息、電池的電量SOC值及制動強度,實際控制的有賽車質心速度、踏板的開度及電池電量來判斷賽車在制動時選擇哪種方制動方式。賽車實際制動邏輯圖如圖5。為了保護電池的使用時間及使用率,當電池的SOC 值高于80%時,再生制動不參與工作,而且當車速較低時(低于5km/h)時,由于回收能量較少,此時只使用摩擦制動。在比賽過程中制動強度z 一般小于0.7,此時采用再生制動對制動能量進行回收。當制動強度z 大于0.7是,判定為一種緊急工況,采用液壓制動進行緊急制動。
3 1UDDS 循環工況
美國UDDS 城市循環工況是具有較高平均車速的循環工況.根據前邊選擇的電液復合再生制動策略及模型的搭建,選擇UDDC 循環工況下對所建立的再生制動策略進行仿真研究,仿真設置路面附著系數為0.85,SOC 初始值為0.8,仿真曲線如下:
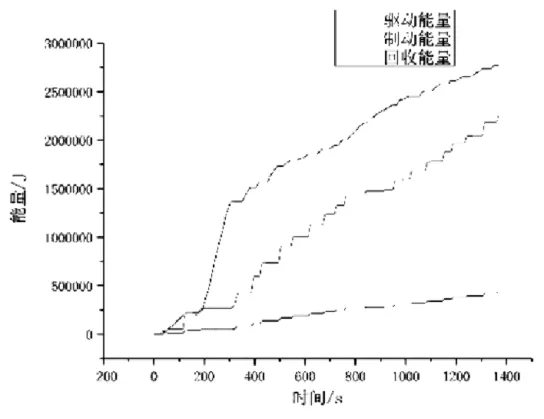
圖2 能量變化曲
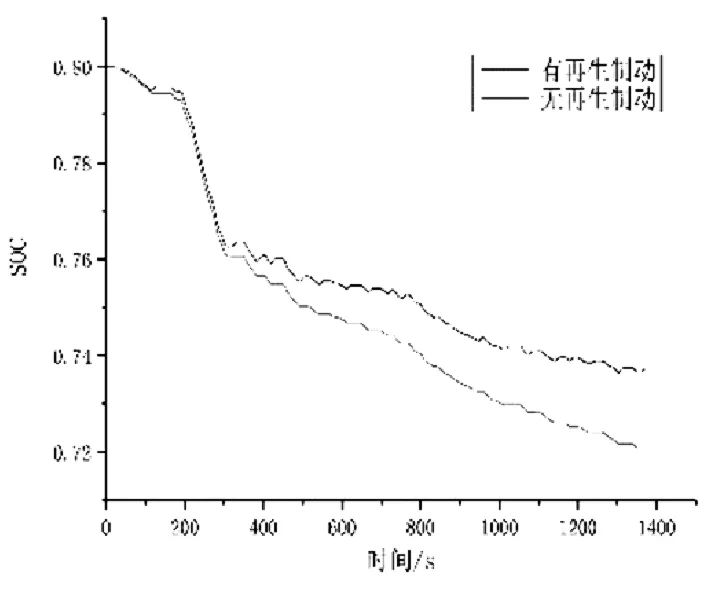
圖3 電池SOC 值變化
由圖2 可以看出在整個循環制動工況中,賽車作用在驅動上的總能量為2771KJ,制動總消耗能量為2248KJ,再生制動回收能量為435KJ,制動耗能減少19.3%。由圖3 可以看出電池SOC 值在某一時刻有能量回收高于無能量回收,賽車制動主要以液壓制動為主,再生制動為輔,保持車輛穩定性,提高賽車節能性。
4 結論
通過對雙電機獨立驅動賽車制動系統組成及工作原理的分析,了解影響賽車制動能量回收的主要因素以及其工作工況。對于電動賽車來說,由于自身雙電機、儲能裝置及路面等因素,提出一種雙電機獨立驅動的電液復合再生制動策略的再生制動策略。通過對系統模型的搭建,選擇了邏輯門限制控制再生制動策略,在UDDS 經典的循環工況下進行仿真分析,最后得出本文所提出的電液復合再生制動策略能有效的提高賽車制動能效的回收,提高電池箱的壽命以及提高賽車的節能性。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
鐵道通信信號(2020年9期)2020-02-06 09:15:22
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
