基于信道狀態(tài)信息的被動式目標(biāo)軌跡跟蹤方法*
2019-08-14 09:55:18郝占軍顏麗華黨小超
傳感技術(shù)學(xué)報(bào) 2019年7期
郝占軍,顏麗華,黨小超,2
(1.西北師范大學(xué)計(jì)算機(jī)科學(xué)與工程學(xué)院,蘭州 730070;2.甘肅省物聯(lián)網(wǎng)工程研究中心,蘭州 730070)
室內(nèi)不像在室外環(huán)境中一樣可借助衛(wèi)星信號進(jìn)行定位導(dǎo)航,因此基于WiFi的室內(nèi)位置服務(wù)應(yīng)用越來越廣泛[1]。人的移動軌跡相比于物體的移動和單純的定位信息,是一個(gè)更加細(xì)粒度,更為深層次的精確測量,所以室內(nèi)的人員軌跡跟蹤檢測具有一定的難度,與人員位置信息[2]的獲取相比,人員軌跡跟蹤更加復(fù)雜,存在著很多壁壘。目前被廣泛使用的目標(biāo)軌跡跟蹤方法,大部分需要給被測目標(biāo)佩戴RFID標(biāo)簽、UWB標(biāo)簽、[3]GPS模塊等設(shè)備,才能完成目標(biāo)軌跡跟蹤,如果在某些緊急情況下,所需觀測的對象不方便或不配合攜帶設(shè)備,就無法完成對目標(biāo)人員的軌跡跟蹤,例如對病人行為軌跡的監(jiān)測,對入侵者的監(jiān)測。針對上述情況,有研究者提出了被動式人員軌跡跟蹤,被動式目標(biāo)軌跡測繪因?yàn)槠洳恍枰粶y者攜帶任何設(shè)備而逐漸成為研究熱點(diǎn)。
目前,主流的人員跟蹤系統(tǒng)主要有被動式目標(biāo)軌跡跟蹤、專業(yè)化的特殊的傳感器軌跡跟蹤、基于位置信息的軌跡跟蹤、基于人體行為監(jiān)控的軌跡檢測。文獻(xiàn)[4]針對能耗和計(jì)算量問題,提出了基于壓縮感知的被動式目標(biāo)跟蹤算法,該算法可以通過觀測少量數(shù)據(jù)測繪出目標(biāo)人員的軌跡。文獻(xiàn)[5]提出了一種通過攝像機(jī)采集到運(yùn)動目標(biāo)圖像,再利用卡爾曼濾波對運(yùn)動目標(biāo)進(jìn)行跟蹤對算法。文獻(xiàn)[6]針對不同的運(yùn)動目標(biāo)和運(yùn)動速度,提出了自適應(yīng)濾波方法,即根據(jù)不同的速率自動匹配不同的濾波方法。文獻(xiàn)[7]和文獻(xiàn)[8]在無設(shè)備跟蹤方面,作者利用卡爾曼濾波基于RIT方差和基于子空間方差的無線電層析成像的定位結(jié)果來跟蹤單個(gè)人。文獻(xiàn)[9]將工作擴(kuò)展到多個(gè)人的追蹤,把多個(gè)人的追蹤問題轉(zhuǎn)化為一個(gè)數(shù)據(jù)分配問題(DAP),用最小化DAP成本來實(shí)現(xiàn)多人追蹤。文獻(xiàn)[10]在室內(nèi)環(huán)境的軌跡跟蹤中,提出了基于信道狀態(tài)信息CSI(Channel State Information)的Doopler-Music軌跡跟蹤算法。目前的軌跡跟蹤方法仍然存在通信消耗大,算法復(fù)雜度高等問題,針對這些問題,本文提出了基于CSI的被動式目標(biāo)軌跡跟蹤方法。
1 相關(guān)理論
1.1 信道狀態(tài)信息

CSI與信號接收強(qiáng)度(Received Signal Strength,RSS)相比,是一個(gè)更加細(xì)粒度的描述無線物理信道狀態(tài)的量[12-13],對環(huán)境的變化更加敏感,常應(yīng)用于人體行為感知識別、人員行為狀態(tài)分析、行動軌跡跟蹤等。本文所講的CSI就是無線信道中信號在每條傳輸路徑上的衰弱因子,當(dāng)有目標(biāo)出現(xiàn)在觀測區(qū)域的不同位置時(shí),CSI信號會發(fā)生不同程度的衰減,從而可以檢測到人員的位置信息[14]。
1.2 卡爾曼濾波
卡爾曼濾波器是一種很好的統(tǒng)計(jì)工具,它可以用最小化誤差平均值來估計(jì)過程狀態(tài)[15]。本文使用卡爾曼濾波器將當(dāng)前估計(jì)與新測量混合,以最小化估計(jì)方差的方式產(chǎn)生新估計(jì)。根據(jù)概率的基本規(guī)律,卡爾曼濾波算法在解決目標(biāo)人員跟蹤問題時(shí)是在得到觀測信息的基礎(chǔ)上,通過當(dāng)前狀態(tài)向量的概率密度函數(shù)(PDF)從而估計(jì)計(jì)算出目標(biāo)的狀態(tài)[16]。卡爾曼濾波的過程中,試圖估計(jì)的是目標(biāo)人員的坐標(biāo)和速度,而本文測量的只是坐標(biāo)。利用預(yù)先定義好的基于卡爾曼濾波的跟蹤模型,將基于卡爾曼濾波的跟蹤模型應(yīng)用于基于位置指紋的跟蹤算法中。
1.3 K近鄰算法
K近鄰(KNN)算法在進(jìn)行分類時(shí),只與少量的相鄰樣本有關(guān),與分類規(guī)則,K的大小和距離度量息息相關(guān)[17]。因此KNN算法適用于交叉或重疊區(qū)域較多的樣本集。
輸入:訓(xùn)練數(shù)據(jù)集,
T={(x1,y1),(x2,y2),…,(xn,yn)}
其中xi∈Rn,yi∈{c1,c2,…,ck}和測試數(shù)據(jù)x。
輸出:實(shí)例x所屬的類別。
在本文應(yīng)用KNN算法進(jìn)行位置跟蹤匹配時(shí)三要素分別如下描述:
距離度量:
(1)
其中p≥1;當(dāng)p=2時(shí)是歐氏距離,當(dāng)p=1時(shí)是曼哈頓距離。
在應(yīng)用中通常采用交叉驗(yàn)證的方法來選取合適的K值,一般來說K值較小并且是奇數(shù)[15]。
分類規(guī)則:根據(jù)給定的距離度量,在訓(xùn)練集T中找到與x距離最近的k個(gè)樣本,涵蓋這k個(gè)點(diǎn)的x的鄰域記作Nk(x)。
在Nk(x)中根據(jù)分類規(guī)則(如多數(shù)表決)確定x的類別y:

(2)
給定測試樣本x,其中最鄰近的k個(gè)訓(xùn)練實(shí)例構(gòu)成集合Nk(x),分類損失函數(shù)為0-1損失[11]。0-1損失函數(shù)是指如果預(yù)測值與目標(biāo)值不相等,則為1,否則為0。如果涵蓋Nk(x)區(qū)域的類別為cj,則分類誤差率是:
2 被動式目標(biāo)軌跡跟蹤方法
本文提出了一種基于信道狀態(tài)信息的目標(biāo)人員軌跡跟蹤方法,首先通過布置好的實(shí)驗(yàn)環(huán)境采集CSI數(shù)據(jù),建立離線指紋庫。在進(jìn)行目標(biāo)跟蹤時(shí),首先通過K最鄰近(KNN)算法得到一個(gè)位置估計(jì),然后利用融合了卡爾曼濾波算法的位置指紋跟蹤系統(tǒng)得到目標(biāo)的位置,最后將目標(biāo)人員的所有活動點(diǎn)連接起來得到目標(biāo)人員的運(yùn)動軌跡。其目標(biāo)軌跡跟蹤方法基本流程圖如圖1所示。
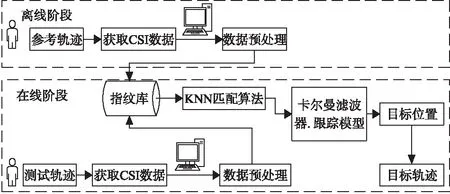
圖1 目標(biāo)人員軌跡跟蹤流程圖
2.1 基于卡爾曼濾波的跟蹤模型
針對人員軌跡跟蹤系統(tǒng),先驗(yàn)知識包括被測者的位置、朝向、當(dāng)前運(yùn)動狀態(tài)、運(yùn)動速度等[18],觀測信息包括被測者的加速度、位移等。
系統(tǒng)模型為:
Ok=g(Ok-1,Rk-1,Tk)
(4)
觀測模型為:
Qk=j(Ok,Sk)
(5)
Ok是第k次迭代時(shí)的狀態(tài)向量,Qk是第k次迭代時(shí)的觀測狀態(tài),g(·)表示系統(tǒng)函數(shù),Rk是系統(tǒng)輸入,j(·)表示觀測函數(shù),Tk是過程噪聲,Sk是測量噪聲。
根據(jù)概率的基本規(guī)律,卡爾曼濾波算法在解決目標(biāo)人員跟蹤問題時(shí)是在得到觀測信息的基礎(chǔ)上,通過當(dāng)前狀態(tài)向量的概率密度函數(shù)從而估計(jì)計(jì)算出目標(biāo)的狀態(tài)。
預(yù)測狀態(tài):使用先前的測量值進(jìn)行k-1次迭代來預(yù)測當(dāng)前狀態(tài)Ok:

(6)
更新狀態(tài):使用第k次迭代得到的測量值更新預(yù)測Ok的值:
其中g(shù)(Qk|Ok)是可能性,p(Ok|Q1:k-1,R0:k-1)是先驗(yàn)概率,p(Ok|Q1:k,R0:k-1)是后驗(yàn)概率。
如果式(4)中的系統(tǒng)模型g(·)和測量模型j(·)都是狀態(tài)向量Ok的的線性函數(shù),輸入Rk,式(5)中的測量噪聲Sk是高斯噪聲,則式(6)和式(7)可以被寫成如下:
Ok=AOk-1+CRk-1+Tk
(8)
Qk=HOk+Sk
(9)
其中是A狀態(tài)轉(zhuǎn)移矩陣,C是輸入矩陣,H是度量矩陣。
在我們的跟蹤系統(tǒng)中,我們假設(shè)目標(biāo)人員以勻速方式行走,設(shè)置不同的行走速度。
設(shè)狀態(tài)向量Ok=[pxk,pyk,vxk,vyk],其中(pxk,pyk)和(vxk,vyk)分別是主體的坐標(biāo)和速度,nk是系統(tǒng)的隨機(jī)加速度。所以系統(tǒng)模型為:
Ok+1=AOk+Bnk
(10)
其中:

對于測量模型Qk=HOk+Sk直接在本地化系統(tǒng)中測量到目標(biāo)人員的坐標(biāo)Qk=(pxk,pyk),所以我們的跟蹤系統(tǒng)測量方程式為:Qk=(pxk,pyk),測量矩陣H為:

最終融合了卡爾曼濾波算法的目標(biāo)人員跟蹤模型描述如下:
Step1使用先前的測量值進(jìn)行次迭代來預(yù)測當(dāng)前狀態(tài)。
Step2使用第k次迭代得到的測量值更新預(yù)測Ok的值。
Step3若系統(tǒng)模型g(·)和測量模型j(·)都是狀態(tài)向量Xk的的線性函數(shù),則將式(6)和式(7)改成式(8)和式(9)。
2.2 基于CSI的KNN位置指紋跟蹤方法
基于CSI的KNN位置指紋算法采用現(xiàn)有的WIFI網(wǎng)絡(luò)和CSI數(shù)據(jù)采集設(shè)備,將在線階段采集到的數(shù)據(jù)與先前建立好的離線數(shù)據(jù)庫進(jìn)行匹配得到結(jié)果。
2.2.1 離線階段

由于實(shí)驗(yàn)過程中會受到多種因素的影響,產(chǎn)生多種噪聲,利用卡爾曼濾波對數(shù)據(jù)進(jìn)行預(yù)處理。如圖2(a)是在參考點(diǎn)采集出的CSI數(shù)據(jù)用MATLAB解析出的圖像,從圖2(a)中我們可以看出,數(shù)據(jù)中包含了很多噪聲,為了使指紋數(shù)據(jù)庫更加精確,我們對采集到的數(shù)據(jù)進(jìn)行多次訓(xùn)練并利用卡爾曼濾波算法對CSI數(shù)據(jù)進(jìn)行預(yù)處理,處理后的圖像如圖2(b)所示。
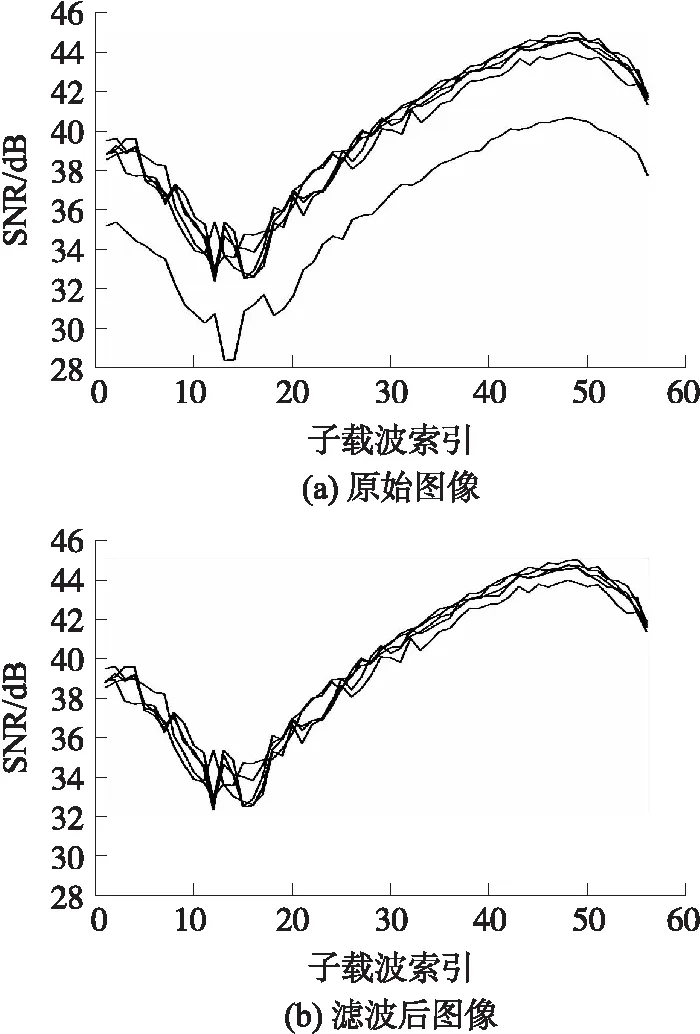
圖2 數(shù)據(jù)預(yù)處理
2.2.2 在線階段
在線位置估計(jì)階段,使用K-最近鄰(KNN)算法作為匹配算法,指紋的偏差表示為歐氏距離,方程式為:
(12)
其中CSIji是從APj處的CSI數(shù)據(jù),CSIj是在線估計(jì)階段測量到的CSI數(shù)據(jù),m是AP的數(shù)量。
(13)
最后選擇k個(gè)最近的樣本來估計(jì)目標(biāo)人員的位置,其中ε是一個(gè)非常小的正常數(shù)。具體的方法描述如下:
Step1在線階段采集CSI數(shù)據(jù)進(jìn)行卡爾曼濾波預(yù)處理。
Step2計(jì)算運(yùn)動目標(biāo)某時(shí)刻位置的指紋偏差,利用式(11)計(jì)算歐式距離。
Step3使用位置指紋算法將實(shí)際測量的位置與參考位置進(jìn)行匹配,得到位置估計(jì)。
Step4將預(yù)先規(guī)定好的跟蹤模型與KNN位置指紋算法融合,得到目標(biāo)人員的運(yùn)動軌跡。
在離線階段,對指紋進(jìn)行多次測量,并利用統(tǒng)計(jì)工具消除誤差。在線位置估計(jì)階段,考慮到目標(biāo)跟蹤是實(shí)時(shí)性的,可以對指紋進(jìn)行很少的測量。在復(fù)雜的室內(nèi)環(huán)境中,信號容易受到干擾,在相位中獲得的數(shù)據(jù)總是伴隨著噪聲,因此,跟蹤誤差是由在線位置估計(jì)中測量的指紋的不準(zhǔn)確性導(dǎo)致的。所以,將卡爾曼濾波模型與KNN位置指紋算法結(jié)合可以大大降低在線階段的不確定性,提高系統(tǒng)的精度。
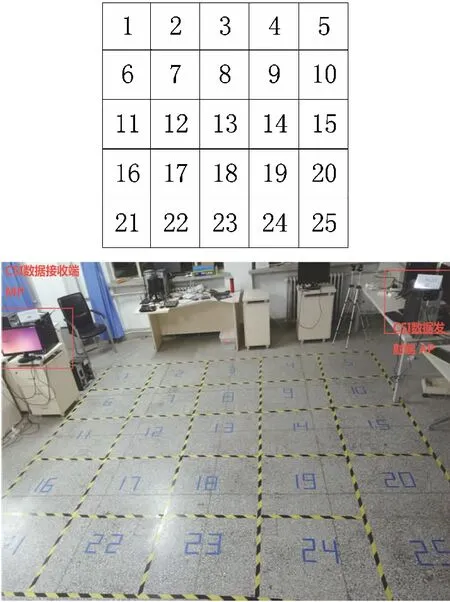
圖3 監(jiān)控區(qū)域網(wǎng)格圖
3 實(shí)驗(yàn)驗(yàn)證及性能分析
3.1 目標(biāo)人員軌跡測繪場景設(shè)置
設(shè)置一個(gè)面積是X×Y的矩形區(qū)域?yàn)槟繕?biāo)人員活動監(jiān)控區(qū)域,將監(jiān)控區(qū)域等分為c×c的正方形網(wǎng)格,如圖 3所示。接下來在圖 4所示的場景中進(jìn)行目標(biāo)人員的軌跡測繪。但是在實(shí)際場景中所監(jiān)控的區(qū)域長寬X或Y往往不能被網(wǎng)格邊長c整除,所以我們選擇在監(jiān)控區(qū)域中選擇一塊正方形區(qū)域劃分為c×c的網(wǎng)格,將網(wǎng)格按照從上到下,從左到右的順序編號為1,2,3,…,N;在監(jiān)控區(qū)域的一側(cè)布置信號發(fā)射器,另一側(cè)布置信號接收器,接收信號的天線與發(fā)射信號的天線布置在同一高度,發(fā)射天線為2根,接收天線為3根。
當(dāng)開啟設(shè)備讓它們相互之間進(jìn)行通信時(shí),監(jiān)控區(qū)域整個(gè)被無線信號覆蓋,當(dāng)監(jiān)控區(qū)域中出現(xiàn)目標(biāo)時(shí),目標(biāo)會對無線通信鏈路的信號產(chǎn)生干擾,包括折射、吸收、反射等。由于目標(biāo)的運(yùn)動,無線鏈路受到不同的干擾,會收集到不同的CSI值。這種變化使得CSI可以對目標(biāo)進(jìn)行跟蹤。圖3為監(jiān)控區(qū)域網(wǎng)格圖。
3.2 實(shí)驗(yàn)環(huán)境
實(shí)驗(yàn)設(shè)備是兩臺內(nèi)核和無線網(wǎng)卡驅(qū)動均經(jīng)過定制的臺式電腦,CPU型號為Intel Core i3-4150,操作系統(tǒng)為Ubuntu10.04LTS,網(wǎng)卡為Atheros 9380,其中一臺為信號發(fā)射機(jī),一臺為信號接收機(jī)。實(shí)驗(yàn)場地是一個(gè)12 m×8 m的辦公區(qū)域,12 m×8 m的辦公區(qū)域被劃分成取出一個(gè)6 m×6 m正方形子區(qū)域,子區(qū)域被劃分為25個(gè)1.2 m×1.2 m的網(wǎng)格,信號接收機(jī)與信號發(fā)射機(jī)距離8 m,天線高度為1.2 m。實(shí)驗(yàn)場景的平面圖以及詳細(xì)部署如圖4所示。
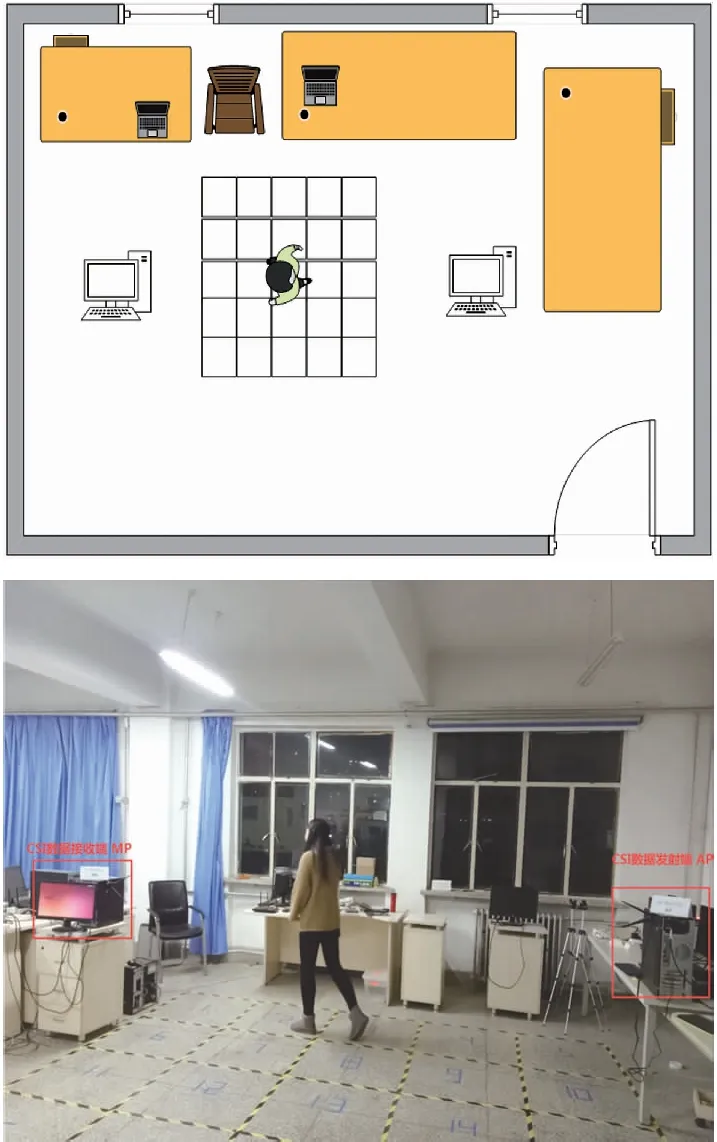
圖4 實(shí)驗(yàn)室環(huán)境平面圖
在訓(xùn)練階段,我們把一名為身高170 cm的女性人員作為跟蹤目標(biāo),收集CSI數(shù)據(jù)。在辦公區(qū)域的跟蹤區(qū)域是6 m×6 m。讓目標(biāo)人員沿著正方形網(wǎng)格走。在實(shí)驗(yàn)中,讓目標(biāo)人員沿著設(shè)定好相同的路線行走,收集100次數(shù)據(jù),分析跟蹤的目標(biāo)軌跡的效果。圖4為本文的實(shí)驗(yàn)室環(huán)境平面圖。
3.3 跟蹤性能分析
目標(biāo)人員在監(jiān)測區(qū)域中沿著預(yù)先設(shè)定好的軌跡以勻速速度行走,獲取真實(shí)的數(shù)據(jù)信息,目標(biāo)人員移動時(shí)錄制視頻。為了收集到數(shù)據(jù)的準(zhǔn)確性,排除室內(nèi)環(huán)境變化的影響,每次實(shí)驗(yàn)都選擇在每天的21:00到23:00。實(shí)驗(yàn)中設(shè)置發(fā)包速率為100 Hz/S,行走速度為0.5 m/s,目標(biāo)人物為170 cm的女性。目標(biāo)人物的步距大約1 m~1.2 m。第一個(gè)實(shí)驗(yàn)選擇直線軌跡。圖5是人員在沿直線行走時(shí)的跟蹤結(jié)果,圓形圖標(biāo)為跟蹤軌跡,加號形圖標(biāo)為真實(shí)軌跡,圖5(a)是跟蹤軌跡與實(shí)際軌跡的跟蹤路徑圖,圖5(b)是跟蹤軌跡與實(shí)際軌跡的針狀圖。
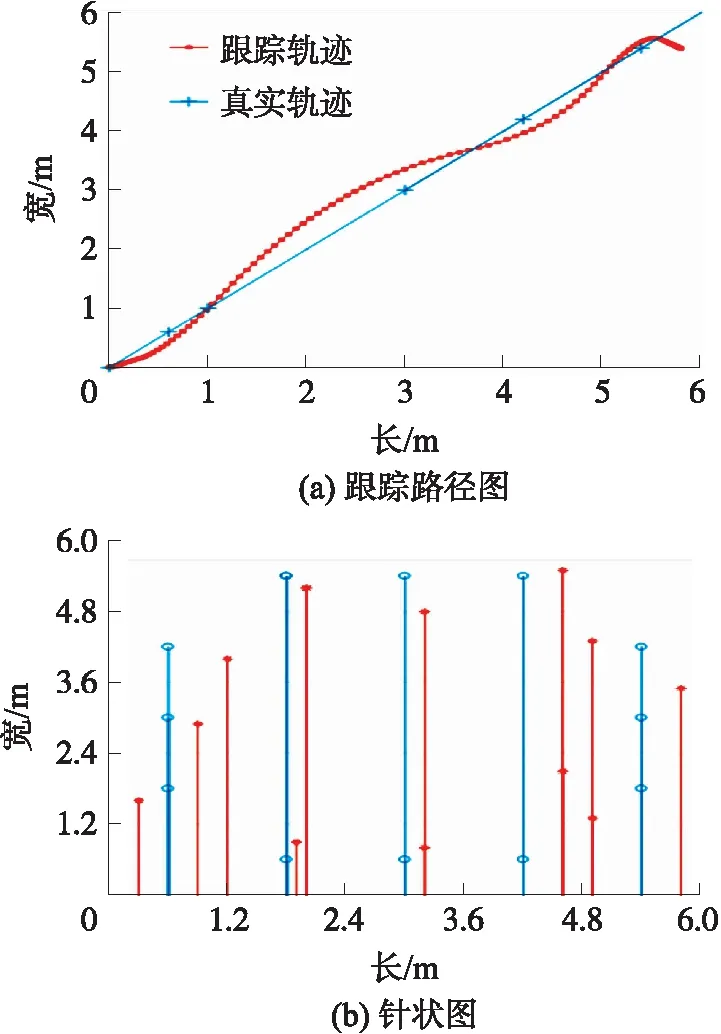
圖5 跟蹤結(jié)果(直線)
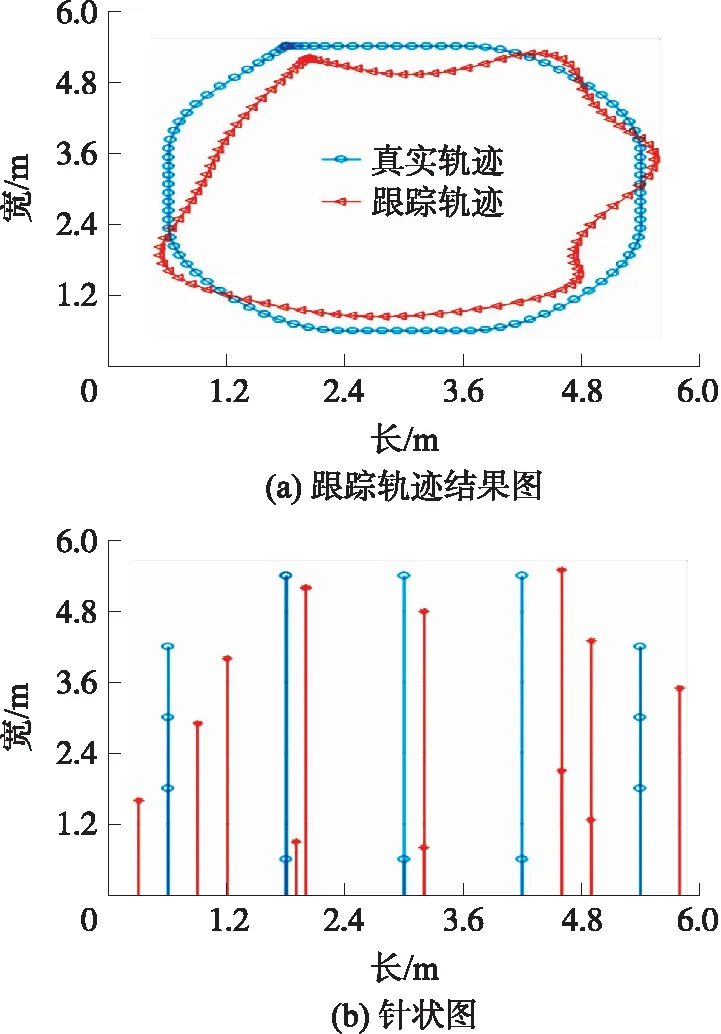
圖6 跟蹤結(jié)果(圓弧)
由圖5可知,當(dāng)目標(biāo)人員沿著直線行走時(shí),跟蹤描繪出的跟蹤結(jié)果誤差較小,跟蹤結(jié)果較為準(zhǔn)確。基于CSI的被動式目標(biāo)軌跡跟蹤對于直線行走的目標(biāo)可以較為精準(zhǔn)的描繪出來,真實(shí)軌跡和跟蹤軌跡基本重合,跟蹤效果明顯,達(dá)到預(yù)期的精度。
第2個(gè)實(shí)驗(yàn)選擇了圓弧軌跡,跟蹤結(jié)果如圖6所示,圓形圖標(biāo)為真實(shí)軌跡,三角形圖標(biāo)為跟蹤軌跡,圖6(a)為跟蹤軌跡結(jié)果圖,圖6(b)為跟蹤結(jié)果針狀圖。
由圖6可知,當(dāng)跟蹤軌跡為圓弧時(shí),跟蹤軌跡與實(shí)際軌跡基本一致,跟蹤結(jié)果較為精確。綜合圖5、圖6可知,在簡單軌跡追蹤時(shí),實(shí)際坐標(biāo)與跟蹤坐標(biāo)差距不大,跟蹤結(jié)果精確度高,在面對復(fù)雜軌跡時(shí),實(shí)際坐標(biāo)與跟蹤坐標(biāo)有了較大差距,跟蹤性能產(chǎn)生誤差,特別是在直角拐彎處跟蹤波動較大。為了消除噪聲、提高精度,本文引入卡爾曼濾波算法進(jìn)行位置指紋跟蹤,跟蹤性能有了較大提高。
不同的運(yùn)動軌跡會對跟蹤性能產(chǎn)生不同的影響,本文設(shè)計(jì)了直線、矩形、圓弧三種不同的運(yùn)動軌跡,圖7顯示了不同的軌跡的誤差分布圖。
由圖7可知,當(dāng)運(yùn)動軌跡為直線和圓弧時(shí),跟蹤精度較軌跡比跟蹤軌跡為矩形時(shí)高,跟蹤誤差在1.5 m能夠達(dá)到20%,跟蹤誤差在3 m以內(nèi)均達(dá)到60%以上,相比之下運(yùn)動軌跡為矩形時(shí)誤差就相對較大,跟蹤誤差在4 m時(shí)僅有69%。運(yùn)動軌跡越簡單,運(yùn)動軌跡越長,跟蹤精度越高。
為了研究行走速度對跟蹤誤差的影響,讓目標(biāo)人員在室內(nèi)按照直線軌跡以勻速行走,速度分別為0.5 m/s,1.0 m/s,1.5 m/s。速度對跟蹤誤差的影響如圖8所示。
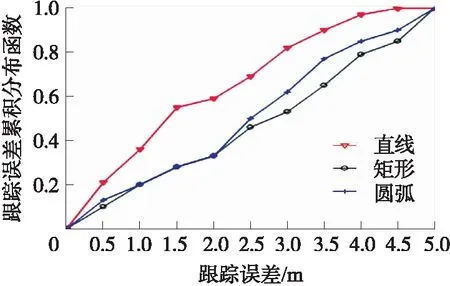
圖7 不同速度跟蹤誤差CDF圖
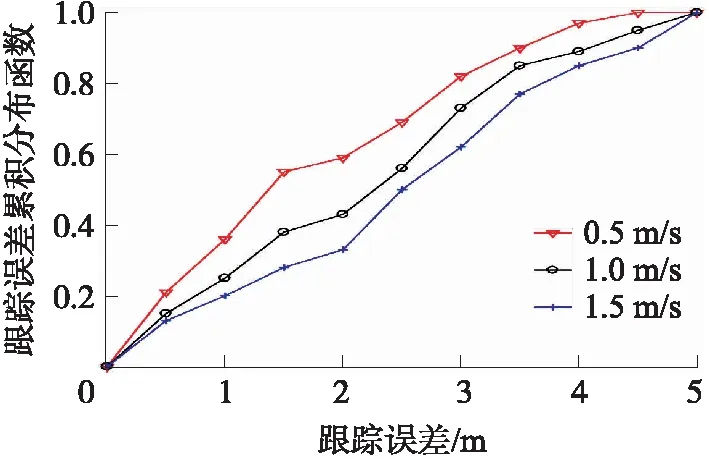
圖8 不同速度跟蹤誤差CDF圖
由圖8可知,速度為0.5 m/s時(shí)跟蹤精度在2 m以內(nèi)的概率達(dá)到了50%,而速度為1.5 m/s時(shí)的跟蹤精度在2 m以內(nèi)的概率只有26%,說明了速度的快慢會對跟蹤精度產(chǎn)生影響,速度為0.5 m/s時(shí)跟蹤誤差最小,跟蹤精度最高。
圖9是不同目標(biāo)的跟蹤性能比較,分別選擇185 cm,178 cm的男性和170 cm女性進(jìn)行對比實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果如下。
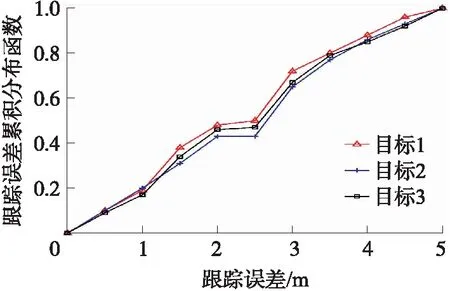
圖9 不同目標(biāo)人員跟蹤誤差CDF圖
由圖9可知不同的目標(biāo)對跟蹤誤差的影響不大,在不同跟蹤目標(biāo)可以達(dá)到相近的精度,說明本方法對不同目標(biāo)具有普適性。
發(fā)包速率對采集的CSI數(shù)據(jù)會產(chǎn)生影響,不同的運(yùn)動狀態(tài)對應(yīng)著不同的最佳發(fā)包速率,所以本文為了獲得最佳的跟蹤效果,實(shí)驗(yàn)驗(yàn)證了不同發(fā)包速率的影響,如圖10所示。
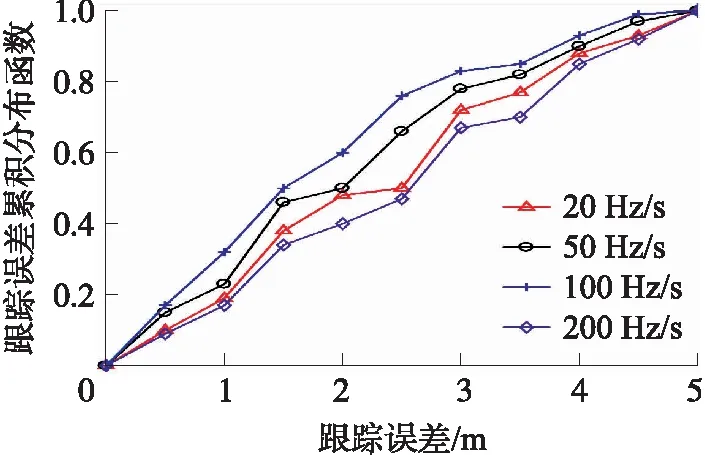
圖10 不同發(fā)包速率跟蹤誤差CDF圖
由圖10可知,當(dāng)發(fā)包速率為100 Hz/S時(shí),跟蹤性能達(dá)到最好,200 Hz/S的發(fā)包速率就較差,相比而言,100 Hz/S的發(fā)包速率比200 Hz/S的跟蹤誤差減小了越18%,實(shí)驗(yàn)說明對于運(yùn)動中的目標(biāo),50 Hz/S~100 Hz/S的發(fā)包速率是最優(yōu)的區(qū)間,不同的運(yùn)動狀態(tài)要選擇適合的發(fā)包速率。
為了驗(yàn)證本文提出的被動式目標(biāo)軌跡跟蹤方法,體現(xiàn)本文算法在跟蹤性能方面的優(yōu)勢,將本文算法與表1中的其他目標(biāo)人員軌跡跟蹤算法進(jìn)行比較。
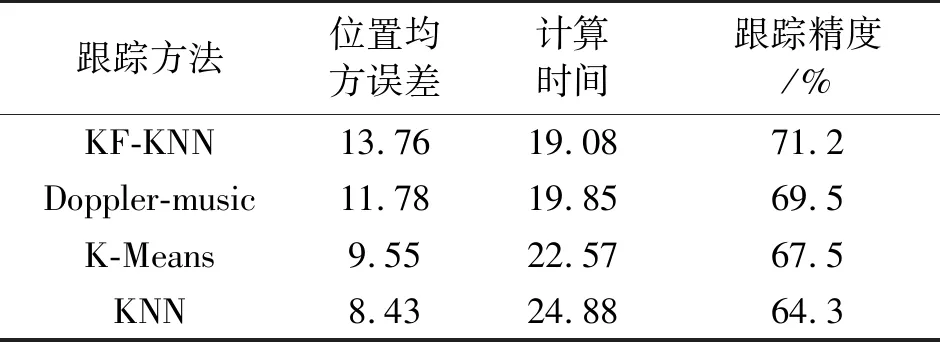
表1 跟蹤方法性能比較
表1顯示了本文提出的被動式軌跡跟蹤方法與其他目標(biāo)跟蹤方法的性能參數(shù),從文中可以看出,本文提出的被動式軌跡跟蹤方法提高了跟蹤精度,減小了計(jì)算時(shí)間和通信開銷。本文的跟蹤方法比Doppler-music算法,傳統(tǒng)的KNN和K-means算法的精度分別提高了1.7%、3.7%和6.9%,總體來說,跟蹤性能有所提高,能更好的實(shí)現(xiàn)對目標(biāo)人員的軌跡跟蹤。
4 結(jié)論
針對目前的被動式目標(biāo)人員軌跡跟蹤方法計(jì)算開銷大,算法復(fù)雜度高等問題,將實(shí)時(shí)數(shù)據(jù)與離線數(shù)據(jù)庫中的數(shù)據(jù)利用融合了卡爾曼濾波的KNN位置指紋算法進(jìn)行匹配,實(shí)現(xiàn)目標(biāo)人員軌跡跟蹤。反復(fù)實(shí)驗(yàn)證明,本文提出的被動式目標(biāo)軌跡跟蹤方法,在普適性,跟蹤精度等方面均有提高,跟蹤可靠性更高。
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(shù)(2018年12期)2018-11-25 09:37:34
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
