基于Flex無線傳感技術(shù)的邊坡位移監(jiān)測研究*
2019-08-14 09:43:42任芳昉洪成雨張孟喜
傳感技術(shù)學(xué)報 2019年7期
任芳昉,洪成雨,2*,張孟喜,李 操
(1.上海大學(xué)土木工程系,上海 200444;2.深圳大學(xué)土木與交通工程學(xué)院,廣東 深圳 518061)
在巖土工程領(lǐng)域,為了確保巖土體和與其相依的建筑物的穩(wěn)定,建立起大規(guī)模、全方位、多維度及多場地的巖土工程監(jiān)測是十分必要的[1]。巖體和土體變形情況的監(jiān)測是建筑、交通、礦山、水利及邊坡等工程的一項重要研究課題[2]。因此,理論分析、室內(nèi)外測試和工程實踐是巖土工程分析三個重要的方面[3]。在室內(nèi)外測試中,首先,巖土工程要求測量設(shè)備可以進(jìn)行長期觀測且不影響其使用效果;其次,測量設(shè)備需承受各種惡劣的巖土環(huán)境,使其傳輸數(shù)據(jù)不受天氣影響;最后巖土工程一般測量值大、測點多,故要求測量設(shè)備量程大且可以大面積埋設(shè)[4]。
基于上述巖土工程獨有的特點,不少學(xué)者考慮將傳感器布設(shè)在巖土中以達(dá)到監(jiān)測土體的效果。傳感器是一種以一定的精確度把被測量轉(zhuǎn)化為與之有確定對應(yīng)關(guān)系的、便于應(yīng)用的某種物理量的測量裝置[5-7]。1988年,我國首次將無線電遙感技術(shù)與位移傳感器技術(shù)相結(jié)合用于邊坡監(jiān)測當(dāng)中[8]。90年代后期,SW型位移計作為機(jī)械位移計的一種,其安裝孔徑為45 mm~60 mm,錨頭抗震性能好,適合在軟弱或堅硬圍巖中安裝,被廣泛應(yīng)用于跨度小于10 m的巖土工程位移監(jiān)測當(dāng)中[9]。1998年德國慕尼黑水電站利用分布式光纖測溫系統(tǒng)證實引水渠保護(hù)層的滲漏是由河谷右坡增加的地表水流引起的,該傳感系統(tǒng)利用光纖的光時域反射(OTDR)技術(shù),具有自標(biāo)定、自校準(zhǔn)和自檢測功能,即使在光纖受損時也可繼續(xù)工作[10]。2011年,陳偉等基于電磁波時域反射原理的遠(yuǎn)程遙感測試技術(shù),設(shè)計出一套完備的時域反射測量(TDR)傳感器,通過大型模型試驗,驗證出該套傳感器可以有效地實時監(jiān)測土體質(zhì)量含水量和干密度的變化情況[11]。綜上所述,傳感器在巖土工程領(lǐng)域有著良好的應(yīng)用前景[12-14]。
本研究提出了一種新的基于Flex傳感技術(shù)的無線位移監(jiān)測系統(tǒng),該系統(tǒng)可對邊坡位移進(jìn)行無線實時監(jiān)測,有著良好的精度和準(zhǔn)確性。
1 Flex傳感器技術(shù)
1.1 Flex傳感器原理
Flex彎曲傳感器是一種將具有波狀紋理的導(dǎo)電油墨或者其他金屬/半導(dǎo)體粒子混合到一種彈性體中,并在通道里嵌入離子液體(IL)作為可變導(dǎo)體的設(shè)備。該傳感器由于應(yīng)用電路簡單,輸出信號易于處理,已廣泛應(yīng)用于農(nóng)業(yè)、醫(yī)療器械、樂器和機(jī)器人等領(lǐng)域[15-17]。其工作原理是Flex傳感器的輸出電阻隨彎曲角度的變化而變化,即將物理量轉(zhuǎn)化為電阻值。
通過Flex彎曲傳感器測得的角度變化,利用簡單的幾何公式,我們可得到不同深度處的水平位移。
(1)
式中:θi為第i個彎曲點處的角度變化,主要通過Flex彎曲傳感器測得;Si為第i+1個彎曲點處的總水平位移,h為彎曲長度,即轉(zhuǎn)軸一側(cè)保護(hù)殼的長度。
1.2 Flex傳感器設(shè)計
本實驗使用的Flex傳感器形狀可以定制,型號為Flex sensor 4.5″,長約為112.24 mm(可測長度為95.25 mm),寬6.35 mm;厚有0.43 mm;電阻公差為±30%;工作溫度在-35 ℃~80 ℃;工作濕度在10%~90%之間,無凝結(jié)。不發(fā)生彎曲時,電阻為25 kΩ;發(fā)生彎曲時,電阻變化范圍為45 kΩ~125 kΩ。該傳感器有著超薄的封裝,可以將它固定在被測曲面上,配合模擬輸出,方便采集處理彎曲信息。其結(jié)構(gòu)系統(tǒng)示意如圖1所示,包括電池、藍(lán)牙采集板以及Flex彎曲傳感器。
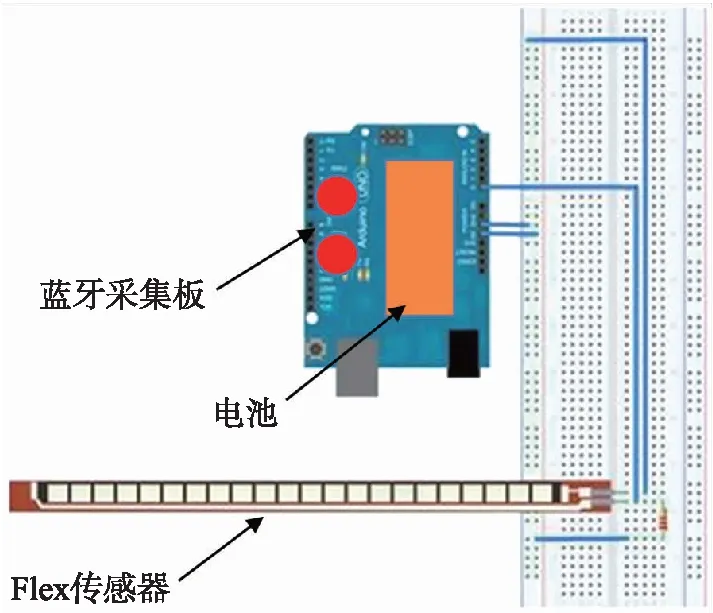
圖1 Flex傳感系統(tǒng)結(jié)構(gòu)圖
由于傳感器的整體彎曲都會給電阻帶來變化,故為了限制、集中傳感器的彎曲點,提高傳感器的測量精度,我們用3D打印制作一個卯榫組合的外殼,選擇日本精工株式會社(NSK)的軸承,將傳感器的彎曲點控制在NSK軸承處,其設(shè)計結(jié)構(gòu)和組合原理如圖2、圖3所示。

圖2 結(jié)合3D打印技術(shù)制作的新型無線彎曲傳感器

圖3 Flex彎曲傳感器組合原理圖
本試驗設(shè)計使用的Flex位移傳感器有一種,是由三個Flex傳感器、三個NSK軸承和三個3D打印的外殼組成的一根傳感器,總長度為295 mm。
1.3 Flex傳感器的標(biāo)定
Flex彎曲傳感器的阻值并非線性變化的,但是由于該傳感器是用來測量小范圍內(nèi)的彎曲角度變化,于是可近似地認(rèn)為電阻與彎曲角度呈線性正比關(guān)系[18]。
標(biāo)定前,將Flex彎曲傳感器嵌入3D打印制作的封裝外殼中,利用數(shù)顯角度尺對其進(jìn)行標(biāo)定,具體操作過程如圖4所示,將嵌入好的Flex傳感器兩邊邊緣緊貼著角度支架兩邊,使其彎曲程度與數(shù)顯角度尺一致,改變數(shù)顯尺的彎曲角度,每變化5°記錄一次Flex彎曲傳感器的示數(shù),最大彎曲到60°。

圖4 標(biāo)定中的彎曲傳感器
實驗使用了三根Flex彎曲傳感器,分別對它們進(jìn)行了標(biāo)定,其結(jié)果如圖5所示,顯示了傳感器信號隨彎曲角度的變化規(guī)律。根據(jù)圖5可以得到,Flex彎曲傳感器在0°~60°范圍內(nèi)輸出的電阻信號與彎曲角度呈線性關(guān)系,且經(jīng)計算可得傳感器信號每變化一個單位,角度變化0.3°~0.4°,即Flex傳感器的測量分辨率為0.3°~0.4°,所以可將其用于邊坡位移監(jiān)測。

圖5 Flex傳感器標(biāo)定結(jié)果
2 基于Flex傳感器的邊坡模型
2.1 邊坡模型
試驗?zāi)P拖錇殚L方體,尺寸(長×寬×高)為600 mm×280 mm×400 mm。其中箱底采用10 mm厚的鋼板,箱壁4個側(cè)面均采用標(biāo)有刻度線的有機(jī)玻璃。
模型箱中填入高130 mm的標(biāo)準(zhǔn)砂,壓實作為土坡的基層,其中標(biāo)準(zhǔn)砂的參數(shù)如表1。接著每填入50 mm高的土層,就壓實一次,直至填至試驗預(yù)定高度330 mm。土坡的傾斜角度為35°。

表1 試驗用標(biāo)準(zhǔn)砂土體參數(shù)
2.2 傳感器的布置
Flex傳感器在邊坡模型中豎直布置一列,這列傳感器是將Flex傳感器插入圖2所示的外殼中,通過卯榫和NSK軸承所連接的。NSK軸承所在位置即監(jiān)測點,在距模型箱左側(cè)360 mm處,布置A3、A4、A5號Flex傳感器組合的長295 mm的傳感器,其具體埋設(shè)尺寸見圖6。同時,我們使用了兩根LVDT位移傳感器,將其垂直邊坡放置,高度分別是270 mm、195 mm。試驗邊坡中的加載主要是通過電子萬能材料試驗機(jī)來施加的,最終的試驗裝置如圖7所示,以及加載原理與邊坡位移的力學(xué)模型如圖8所示,其中均布荷載是通過坡頂?shù)挠材緣K均勻傳遞的,Flex傳感器的傾斜變化量代表邊坡位移的大小。
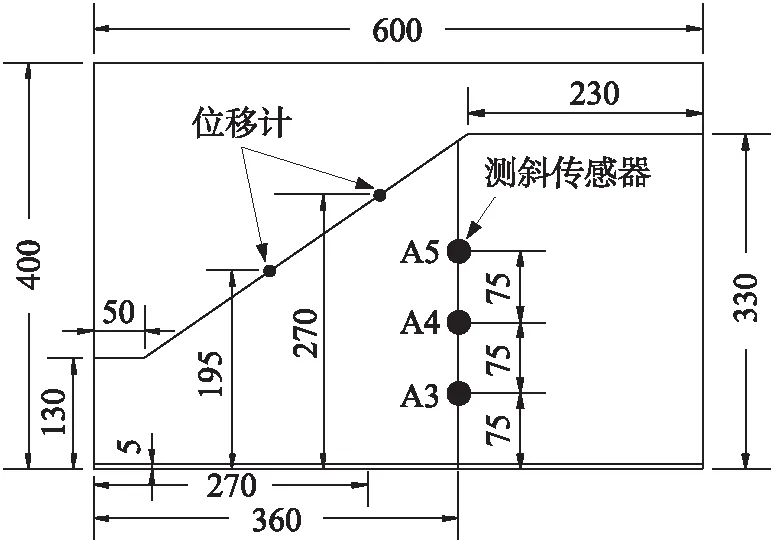
圖6 Flex傳感器布置圖(單位:mm)
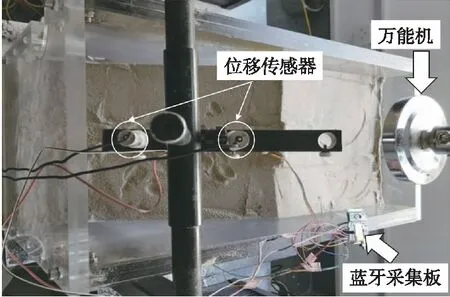
圖7 安裝無線Flex傳感器的邊坡模型

圖8 加載原理與邊坡位移的力學(xué)模型(mm)
2.3 試驗過程
打開萬能機(jī)、位移傳感器的監(jiān)測軟件和Flex傳感器的藍(lán)牙設(shè)備,設(shè)置萬能機(jī)以0.2 mm/s的速度給坡頂施加荷載,待加載曲線圖出現(xiàn)瞬時下降趨勢時,表明邊坡已經(jīng)失穩(wěn),停止加載,記錄萬能機(jī)、位移傳感器和Flex傳感器的數(shù)據(jù)。
3 試驗結(jié)果與分析
3.1 無線Flex傳感器結(jié)果
由上述的Flex傳感器邊坡加載試驗,我們對A3,A4,A5這三個Flex傳感器的數(shù)據(jù)進(jìn)行計算分析。
圖9為A3、A4、A5三個Flex傳感器的示數(shù)隨時間變化圖。從圖7中可以看出,A3、A4兩個Flex傳感器的信號隨時間在逐漸減小,最終破壞時,分別達(dá)到627和585;A5傳感器與其余兩個信號走勢相反,最終達(dá)到597。圖10為A3、A4、A5三個Flex傳感器彎曲角度隨時間變化規(guī)律,該圖是將Flex傳感器的實測數(shù)據(jù)代入標(biāo)定試驗的公式中求得監(jiān)測點的角度變化。從圖中我們可以看出,三個傳感器彎曲角度的范圍都在-10°~10°之間;(由標(biāo)定試驗知道,該傳感器的測量分辨率為0.3°~0.4°,對于該邊坡模型中的小角度變化,我們通過標(biāo)定試驗計算的結(jié)果是有效的。)A3和A4傳感器向內(nèi)彎曲,邊坡破壞時角度分別達(dá)到7.15°和3.06°,而A5傳感器向外彎曲,最終角度變化了4.23°。
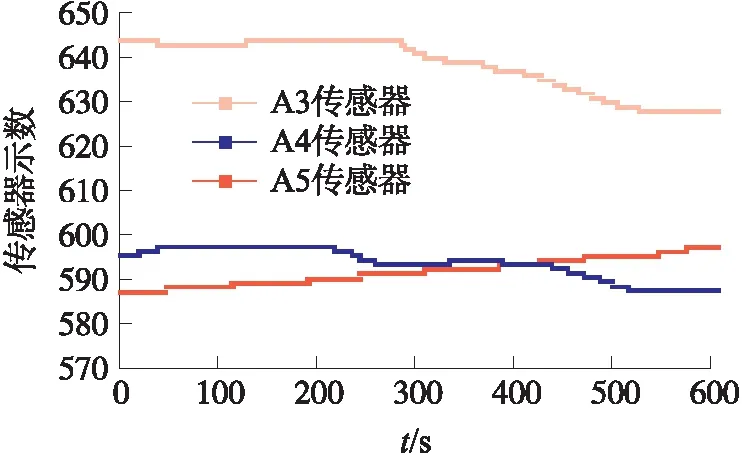
圖9 Flex傳感器示數(shù)時程曲線
3.2 邊坡水平位移分析
將A3傳感器轉(zhuǎn)軸下部的封裝外殼設(shè)計成直角,在模型箱底端將其固定作為固定端,由于邊坡底部位移很小可忽略,我們由圖10 Flex彎曲傳感器在轉(zhuǎn)軸處的角度變化數(shù)據(jù)結(jié)果,通過式(1)計算作出A3、A4、A5三個傳感器在轉(zhuǎn)軸處發(fā)生總水平位移(即相對于原傳感器的位置)的時程曲線,如圖11所示。從圖中我們可以看出,時間一定,Flex傳感器對應(yīng)轉(zhuǎn)軸頂端發(fā)生的水平位移隨著高度的增加而增大;A3、A4和A5傳感器上部轉(zhuǎn)軸發(fā)生的總水平位移最終分別達(dá)到了10 mm,23 mm和33 mm。
通過位移傳感器采集的數(shù)據(jù),我們可以得到邊坡上的傾斜位移隨時間變化的規(guī)律,如圖12所示。從圖中我們可以看出,在200 s前,270 mm高度處位移計測出的傾斜位移值小于195 mm高度處測出的傾斜位移值;在200 s以后,270 mm處測出的傾斜位移值大于195 mm高度處測出的傾斜位移值;最終放置在270 mm處的位移傳感器測出的土體位移為25.324 mm,放置在195 mm處的位移傳感器測出的位移為19.234 mm。

圖10 Flex傳感器彎曲角度隨時間變化關(guān)系

圖11 不同深度點處的水平位移時程曲線

圖12 位移計得到的傾斜位移時程曲線
我們利用圖10中Flex傳感器的最終彎曲角度和式(1)推算出195 mm和270 mm處Flex傳感器所測得的土體水平位移,再利用式(2)計算出位移傳感器所測得的水平位移;比較兩者的位移,結(jié)果如表2所示。
Sh=Sv×cosα
(2)
式中:α為位移傳感器與水平面的夾角,在邊坡最終破壞時195 mm處的α角度約為35°,270 mm處的α角度約為20°。Sh為h高度處的水平位移,Sv為h高度處的傾斜位移。
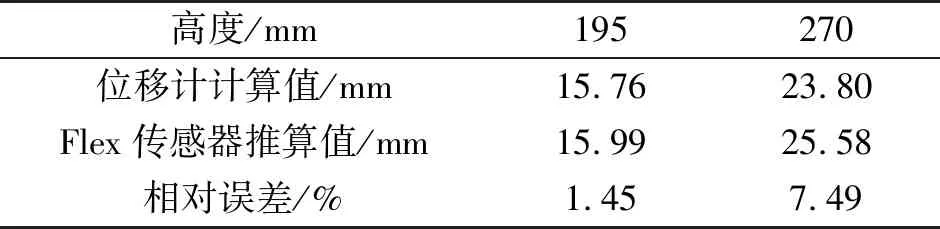
表2 位移傳感器與Flex傳感器對比
注:相對誤差=|Flex傳感器推算值-位移計測出值|/位移計測出值
4 結(jié)論
本研究研發(fā)了一種新的基于Flex傳感技術(shù)的無線位移監(jiān)測系統(tǒng),通過將其應(yīng)用到邊坡模型監(jiān)測之中,得到如下結(jié)論:①將3D打印和Flex彎曲傳感技術(shù)相結(jié)合,開發(fā)出一種新型的無線傳感器,通過該傳感器可測得邊坡的角度變化,從而反推邊坡位移。②通過標(biāo)定試驗,我們得出Flex彎曲傳感器在0°~60°范圍內(nèi)彎曲角度與其信號有著良好的線性關(guān)系,且其測量靈敏度可達(dá)到0.3°~0.4°。③將該傳感器應(yīng)用于邊坡位移監(jiān)測中,監(jiān)測結(jié)果與傳統(tǒng)傳感器監(jiān)測結(jié)果吻合良好。
考慮到目前我們的工況有限,未來會在更大的模型或現(xiàn)場試驗中做進(jìn)一步的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
