有界變化時(shí)滯和聯(lián)合連通拓?fù)錀l件下的分布式無人機(jī)編隊(duì)飛行控制策略
2019-08-06 01:49:10李小民毛瓊甘勤濤杜占龍
兵工學(xué)報(bào) 2019年6期
關(guān)鍵詞:控制策略
李小民, 毛瓊, 甘勤濤, 杜占龍
(1.石家莊鐵道大學(xué) 電氣與電子工程學(xué)院,河北 石家莊 050043;2.陸軍工程大學(xué)石家莊校區(qū) 無人機(jī)工程系,河北 石家莊 050003;3.63850部隊(duì)總體研究所,吉林 白城 137001)
0 引言
近年來,無人機(jī)編隊(duì)協(xié)同控制在執(zhí)行戰(zhàn)場(chǎng)目標(biāo)偵查、多目標(biāo)攻擊、跟蹤監(jiān)視、實(shí)施電磁干擾和低空突防等方面以其執(zhí)行效率高、效果好以及靈活性和魯棒性強(qiáng)等特點(diǎn),逐漸成為當(dāng)前無人機(jī)領(lǐng)域的研究熱點(diǎn)之一。相應(yīng)的研究方法有領(lǐng)航跟隨法、虛擬結(jié)構(gòu)法以及基于行為的方法,這些方法各有優(yōu)勢(shì),但分別存在誤差積累、結(jié)構(gòu)不靈活、魯棒性差以及難以用數(shù)學(xué)方法分析群體行為等問題[1-2]。近幾年發(fā)展起來的一致性方法是一種靈活性好、魯棒性強(qiáng)的分布式編隊(duì)控制方法,它強(qiáng)調(diào)智能體通過獲取鄰居智能體的狀態(tài)信息來控制自身的狀態(tài),從而實(shí)現(xiàn)對(duì)整體行為的控制,使編隊(duì)趨于期望狀態(tài)。眾多學(xué)者對(duì)一致性理論展開了研究,研究對(duì)象的系統(tǒng)模型從1階和2階積分系統(tǒng)[3-5]到高階系統(tǒng)[6-7]、從線性[8-9]到非線性[10-11]、從連續(xù)系統(tǒng)到離散系統(tǒng)[12-13]等。由于通信網(wǎng)絡(luò)的拓?fù)渥兓蜁r(shí)滯現(xiàn)象對(duì)編隊(duì)控制有著重要影響,很多文獻(xiàn)對(duì)此進(jìn)行了研究,但大多數(shù)文獻(xiàn)均假設(shè)通信拓?fù)涔潭╗14-17]。文獻(xiàn)[18-20]雖然同時(shí)考慮了時(shí)滯和網(wǎng)絡(luò)拓?fù)涞膭?dòng)態(tài)變化,但是分別針對(duì)慢變時(shí)滯、線性時(shí)滯和定常時(shí)滯,對(duì)時(shí)滯的考慮比較理想。由于受網(wǎng)絡(luò)帶寬、傳輸速率的限制以及傳輸可靠性的影響,網(wǎng)絡(luò)通信中時(shí)滯的非線性、快變以及跳變現(xiàn)象時(shí)常發(fā)生,成為制約多無人機(jī)協(xié)同控制效果的重要因素;且隨著多無人機(jī)的運(yùn)動(dòng),其位置的變化會(huì)引起編隊(duì)通信拓?fù)涞膭?dòng)態(tài)改變,因此研究通信拓?fù)淝袚Q和復(fù)雜時(shí)滯變化情況下的編隊(duì)控制問題更具有較強(qiáng)的現(xiàn)實(shí)意義。
雖然由多無人機(jī)組成的網(wǎng)絡(luò)通信時(shí)滯變化復(fù)雜,但它們一般在有界區(qū)間內(nèi)變化。因此,本文針對(duì)多無人機(jī)在網(wǎng)絡(luò)時(shí)滯有界和通信拓?fù)渎?lián)合連通情況下的編隊(duì)控制問題展開研究,通過設(shè)計(jì)基于一致性理論的編隊(duì)控制策略,采用Lyapunov穩(wěn)定理論將該策略下的編隊(duì)飛行控制問題轉(zhuǎn)化為系統(tǒng)穩(wěn)定性問題加以分析,從而得到實(shí)現(xiàn)編隊(duì)飛行的充分條件,即當(dāng)系統(tǒng)滿足某些線性矩陣不等式條件時(shí),該控制策略能指導(dǎo)無人機(jī)編隊(duì)以期望的目標(biāo)隊(duì)形和速度穩(wěn)定飛行。
1 無人機(jī)編隊(duì)系統(tǒng)動(dòng)力學(xué)建模
考慮由N架無人機(jī)組成的編隊(duì)在三維空間的協(xié)同編隊(duì)飛行控制問題。對(duì)編隊(duì)中第i架無人機(jī)進(jìn)行動(dòng)力學(xué)建模得到:
(1)

(2)
ui(t)與vdi、φdi、χdi之間的關(guān)系為
(3)
無人機(jī)的性能約束為對(duì)狀態(tài)量Xi以及vdi、φdi、χdi的限定,具體可參考文獻(xiàn)[21]中的方法進(jìn)行處理。
2 圖論基礎(chǔ)知識(shí)


1)Z<0;

引理2[23]對(duì)于任意矩陣W∈Rn×n,0≤τm≤τ1(t)≤τ2(t)≤τM以及向量值函數(shù)ω(s),以下積分不等式成立:
3 控制策略設(shè)計(jì)與穩(wěn)定性證明
3.1 基于一致性理論的控制策略設(shè)計(jì)
對(duì)于由N個(gè)成員構(gòu)成的無人機(jī)編隊(duì),其每個(gè)成員在任意時(shí)刻需要根據(jù)鄰居無人機(jī)的狀態(tài)信息來控制和更新自己的當(dāng)前運(yùn)動(dòng)狀態(tài)。若用無向圖描述編隊(duì)內(nèi)部各架無人機(jī)之間的通信拓?fù)潢P(guān)系,則由于系統(tǒng)內(nèi)部的無人機(jī)成員在與鄰近無人機(jī)進(jìn)行無線通信交換彼此的狀態(tài)信息(位置、速度)時(shí),受通信帶寬、傳播速率、通信距離的限制以及外界干擾和環(huán)境的影響,其時(shí)滯會(huì)發(fā)生復(fù)雜變化,通信拓?fù)鋾?huì)隨著無人機(jī)的運(yùn)動(dòng)不斷切換,在此引進(jìn)一個(gè)分段連續(xù)的常值切換函數(shù)l(t):[0,∞)|→p={1,2,…,Λ},簡(jiǎn)記為l,其中Λ為所有可能的無向通信拓?fù)淇倲?shù)。
由(2)式可得第i架無人機(jī)的動(dòng)態(tài)方程為
(4)
式中:ζi(t)∈R3表示第i架無人機(jī)的速度;控制輸入量ui(t)設(shè)計(jì)為

(5)
式中:ζd(t)∈R3表示編隊(duì)的期望運(yùn)動(dòng)速度(根據(jù)vdi、φdi和χdi進(jìn)行解算);k1、k2、k3為各個(gè)分量的控制權(quán)重,且k1>0、k2>0、k3>0;τ(t)>0代表t時(shí)刻第j架無人機(jī)向第i架無人機(jī)傳遞信息時(shí)的網(wǎng)絡(luò)時(shí)滯,意味著第i架無人機(jī)在t時(shí)刻接收到的第j架無人機(jī)的狀態(tài)信息為ξj(t-τ(t))和ζj(t-τ(t))。
多架無人機(jī)要形成一定的隊(duì)形,需要個(gè)體在運(yùn)動(dòng)時(shí)相互之間形成并保持某種相對(duì)幾何位置關(guān)系。為方便描述,設(shè)定目標(biāo)隊(duì)形中心為編隊(duì)中心,如圖1所示。

圖1 無人機(jī)編隊(duì)平面圖Fig.1 Plane graph of UAV formation
在圖1中,目標(biāo)編隊(duì)隊(duì)形為楔形,Or為其編隊(duì)中心,O代表笛卡爾坐標(biāo)系的原點(diǎn),第i架無人機(jī)、第j架無人機(jī)和編隊(duì)中心Or在笛卡爾坐標(biāo)系中的位置分別為ξi(t)、ξj(t)和ξr(t),第i架無人機(jī)、第j架無人機(jī)與Or的距離分別為ri和rj,二者之間的期望位置差值矢量rji=rj-ri,因此rij=-rji.
若第i架無人機(jī)在控制量ui(t)作用下其狀態(tài)[ξi(t)-ξj(t)]→rij且ζi(t)→ζj(t)→ζd(t),則意味著無人機(jī)編隊(duì)形成期望的目標(biāo)隊(duì)形,并以期望的運(yùn)動(dòng)速度保持飛行。

(6)

(7)
3.2 系統(tǒng)穩(wěn)定性分析

(8)
(9)

(10)


在定理1中,ΞI為對(duì)稱矩陣,
(11)
式中:*表示ΞI矩陣的對(duì)稱部分。
令δ=(τh-τl)/2,τa=(τh+τl)/2,則ΞI的其他項(xiàng)表達(dá)式如下:


(12)
對(duì)(12)式求導(dǎo),得
(13)
由牛頓- 萊布尼茲公式,
(14)
可將(10)式轉(zhuǎn)化為
(15)
利用引理2,得
(16)
又由于
(17)
式中:-1≤(τa-τ(t))/δ≤1,則
(18)
(16)式和(18)式代入(13)式,得
(19)
再將(15)式代入(19)式并化簡(jiǎn)為
(20)

下面討論對(duì)于編隊(duì)內(nèi)部的所有個(gè)體,該恒定值是否為rij. 先假設(shè)一個(gè)簡(jiǎn)單情況,編隊(duì)內(nèi)部有N-1個(gè)個(gè)體之間達(dá)成了期望的幾何位置關(guān)系,僅有個(gè)體g偏離了期望位置,由于嚴(yán)格受目標(biāo)編隊(duì)隊(duì)形幾何關(guān)系的約束,導(dǎo)致個(gè)體g與其他N-1個(gè)個(gè)體之間的距離恒定值不等于rgk(k∈(1,2,…,N-1))。根據(jù)前面的推導(dǎo)過程可知,個(gè)體g在每個(gè)重復(fù)切換通信拓?fù)涞臅r(shí)間序列內(nèi)未與其他N-1個(gè)個(gè)體中的任何一個(gè)構(gòu)成連通關(guān)系,這與定理1中的通信拓?fù)浼下?lián)合連通的假設(shè)條件是矛盾的,因此該恒定值只能為rgk. 同理,假設(shè)個(gè)體i與j之間的位置差矢量最終收斂至r且r≠rij,意味著個(gè)體i在每個(gè)重復(fù)切換通信拓?fù)涞臅r(shí)間序列[tk,tk+1)內(nèi),未與個(gè)體j以及和個(gè)體j有連通關(guān)系的所有其他個(gè)體中的任何一個(gè)體構(gòu)成連通關(guān)系;進(jìn)一步,與個(gè)體i有連通關(guān)系的任何一個(gè)體也未與個(gè)體j以及和個(gè)體j有連通關(guān)系的所有其他個(gè)體中的任何一個(gè)構(gòu)成連通關(guān)系,即與個(gè)體i有連通關(guān)系的個(gè)體部分和與個(gè)體j有連通關(guān)系的個(gè)體部分不連通,這與定理1中的通信拓?fù)浼下?lián)合連通的假設(shè)條件是矛盾的。充分性證明完畢。
4 仿真分析

表1 無人機(jī)平臺(tái)的主要性能參數(shù)

表2 無人機(jī)編隊(duì)成員的初始狀態(tài)
4.1 快變時(shí)滯條件下的編隊(duì)控制實(shí)現(xiàn)

圖2 無人機(jī)編隊(duì)的通信拓?fù)鋱DFig.2 Communication topology of UAV formation
圖2為5架無人機(jī)之間的通信拓?fù)鋱D,圖2(a)和圖2(b)均不連通,但其聯(lián)合圖連通。5架無人機(jī)的通信拓?fù)湓诟鱾€(gè)時(shí)間子區(qū)間按著(G1,G2)的順序重復(fù)切換,每個(gè)拓?fù)鋱D的駐留時(shí)間為2 s,每條邊權(quán)重為1.

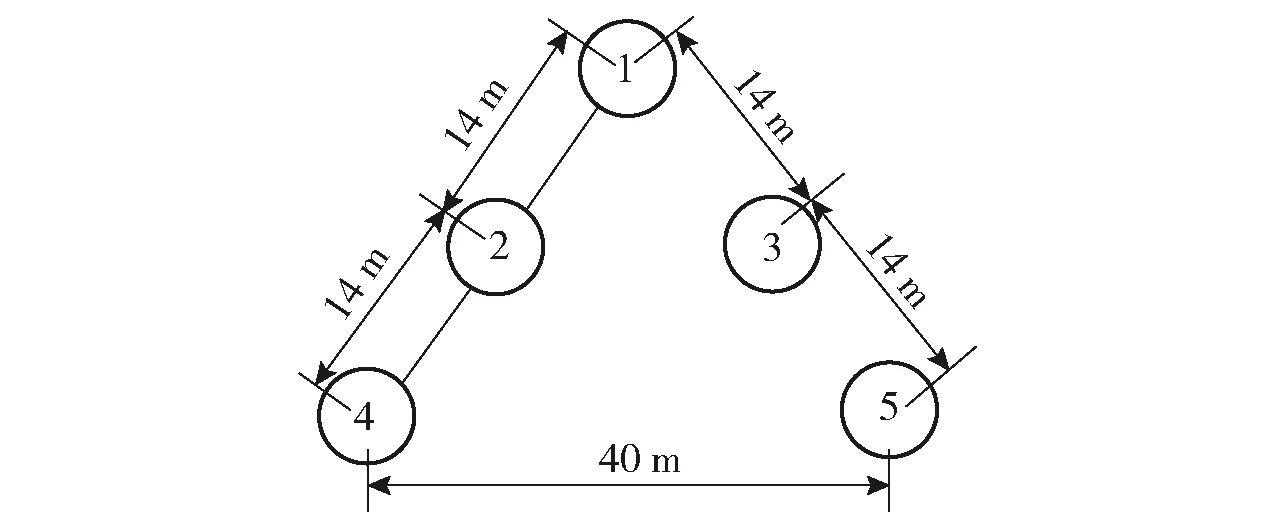
圖3 目標(biāo)編隊(duì)隊(duì)形Fig.3 UAV formation

圖4 隨時(shí)間變化的時(shí)滯曲線Fig.4 Time delay curve over time
無人機(jī)編隊(duì)成員在三維空間的飛行軌跡、各機(jī)的速度、航跡方位角和航跡傾角、各機(jī)之間的距離以及控制量隨時(shí)間變化情況分別如圖5~圖10所示。

圖5 無人機(jī)編隊(duì)在三維空間的軌跡Fig.5 Flight paths of UAV formation in three-dimensional space

圖6 編隊(duì)成員的速度隨時(shí)間變化曲線Fig.6 Speed-time curves of formation members

圖7 航跡方位角隨時(shí)間變化曲線Fig.7 Flight-path azimuth angle versus time
從圖5可知,雖然各架無人機(jī)的初始狀態(tài)不相同,但在控制策略(5)式作用下逐漸靠攏和形成目標(biāo)楔隊(duì)形。本文中航跡方位角的定義為飛行速度矢量在地面上的投影與地面坐標(biāo)軸ogxg軸之間的夾角,以速度向地面的投影在ogxg軸之右時(shí)為正;航跡傾角定義為飛行速度矢量與地平面之間的夾角。各機(jī)速度(見圖6)、航跡方向角(見圖7)和航跡傾角(見圖8)在圖10所示的控制量作用下隨著時(shí)間的推移逐漸與期望值達(dá)成一致,且各機(jī)控制量隨著目標(biāo)的達(dá)成逐漸趨于0,系統(tǒng)進(jìn)入穩(wěn)定狀態(tài),即以目標(biāo)楔隊(duì)形保持編隊(duì)飛行。圖9進(jìn)一步表明:各機(jī)之間的距離逐漸趨于恒定值,且該恒定值與圖3所示目標(biāo)隊(duì)形中各成員之間的距離值一致。該實(shí)驗(yàn)由于引入了速度、加速度約束,控制量需要在有界區(qū)間內(nèi)作用更持久才能使各機(jī)狀態(tài)與期望值達(dá)成一致,它們與時(shí)滯一樣,不僅延緩了一致性的形成速度,而且使?fàn)顟B(tài)量出現(xiàn)了小范圍波動(dòng);此外,拓?fù)涞那袚Q會(huì)誘發(fā)控制量的振蕩行為,且切換越頻繁,帶來的高頻振蕩分量越多。
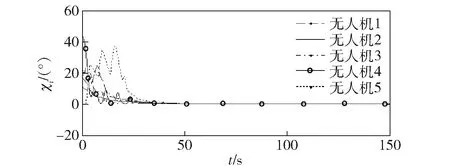
圖8 航跡傾角隨時(shí)間變化曲線Fig.8 Flight-path slant angle versus time

圖9 無人機(jī)之間的距離隨時(shí)間變化曲線Fig.9 Distance among UAVs versus time

圖10 編隊(duì)成員的控制量隨時(shí)間變化曲線Fig.10 Control curves of formation members
4.2 跳變時(shí)滯條件下的編隊(duì)控制實(shí)現(xiàn)
5架飛行器的通信拓?fù)淙鐖D11所示,它們各自均不連通,但其聯(lián)合圖連通。各個(gè)通信拓?fù)鋱D的駐留時(shí)間為1.5 s,且在各個(gè)時(shí)間子區(qū)間按著(G1、G2、G3、G4)的順序重復(fù)切換,每條邊權(quán)重為1.
目標(biāo)隊(duì)形為圖12所示的梯形。5架無人機(jī)性能參數(shù)和初始狀態(tài)見表1和表2. 編隊(duì)成員的期望速度、期望航跡方位角和期望航跡傾角與4.1節(jié)相同。
時(shí)滯函數(shù)τ(t)(隨機(jī)矩形脈沖)隨時(shí)間變化的規(guī)律見圖13. 由于它在有界區(qū)間(0≤τ(t)≤2.5)內(nèi)變化,滿足定理1的使用條件,得到一組可行的控制參數(shù)k1=0.2,k2=0.6和k3=0.1,使多無人機(jī)在控制策略(5)式作用下實(shí)現(xiàn)了期望的編隊(duì)飛行。
無人機(jī)編隊(duì)成員在三維空間的飛行軌跡、各機(jī)的速度、航跡方位角和航跡傾角,各機(jī)之間的距離以及他們的控制量隨時(shí)間變化情況如圖14~圖19所示。
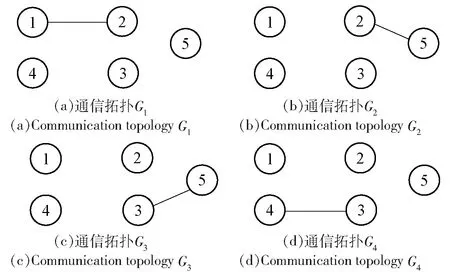
圖11 無人機(jī)編隊(duì)的通信拓?fù)銯ig.11 Communication topology of UAV formation
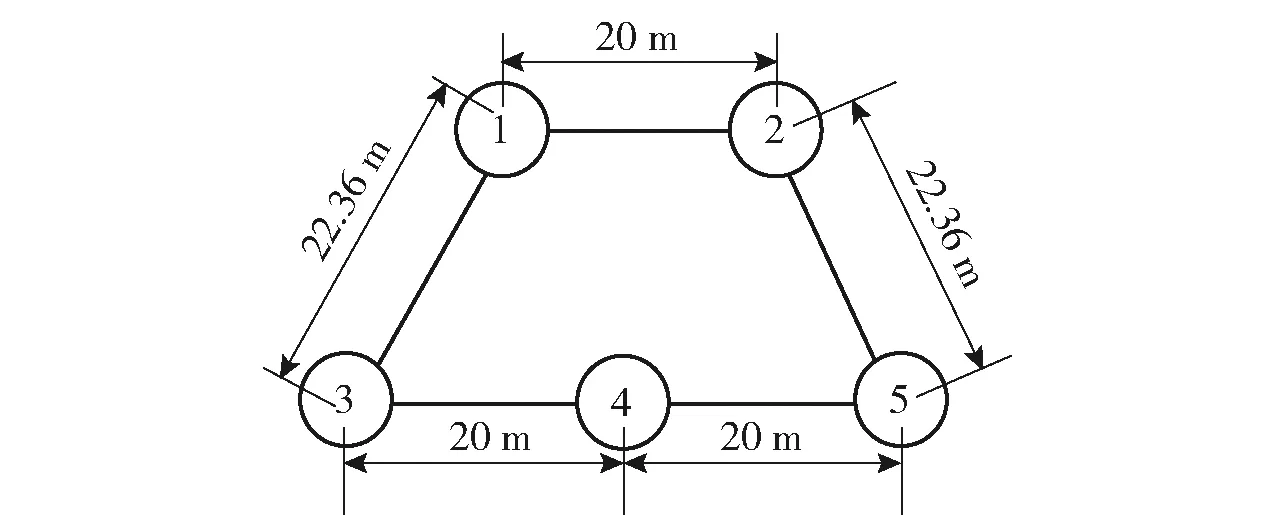
圖12 目標(biāo)編隊(duì)梯形Fig.12 Trapezoidal formation
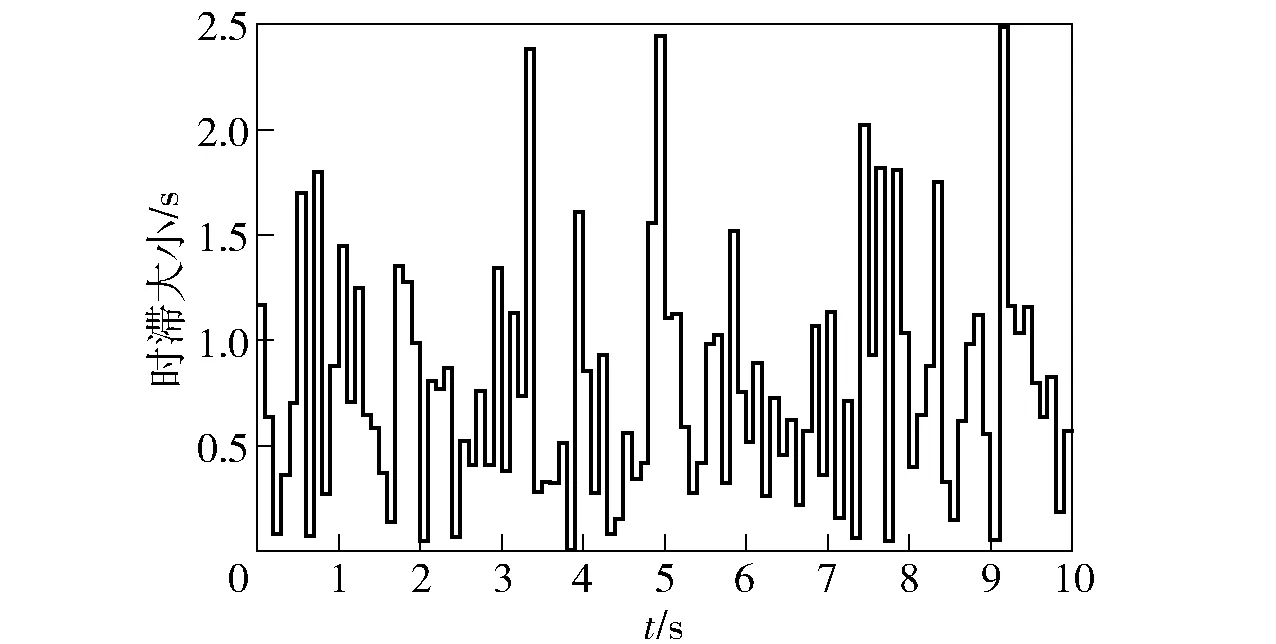
圖13 時(shí)滯隨時(shí)間變化曲線Fig.13 Time delay versus time

圖14 無人機(jī)編隊(duì)在三維空間的軌跡Fig.14 Flight path of UAV formation in three-dimensional space

圖15 編隊(duì)成員的速度隨時(shí)間變化曲線Fig.15 Formation members’ speed versus time
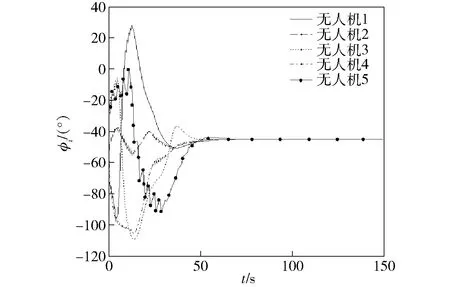
圖16 航跡方位角隨時(shí)間變化曲線Fig.16 Flight-path azimuth angle versus time

圖17 航跡傾角隨時(shí)間變化曲線Fig.17 Flight-path slant angle versus time
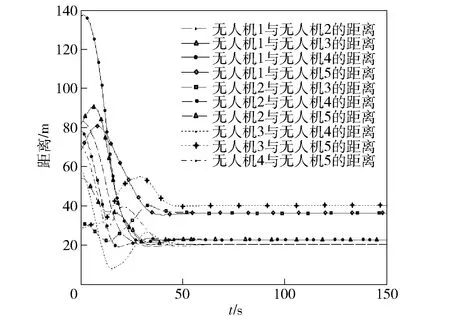
圖18 無人機(jī)之間的距離隨時(shí)間變化曲線Fig.18 Distance among UAVs versus time

圖19 無人機(jī)編隊(duì)成員的控制量隨時(shí)間變化曲線Fig.19 Control curves of formation members
由圖14~圖19可知,雖然網(wǎng)絡(luò)時(shí)滯處于隨機(jī)跳變狀態(tài),但由于其變化有界,編隊(duì)內(nèi)部各個(gè)成員仍可采用定理1中的方法設(shè)計(jì)控制策略,并在圖19所示的控制量作用下逐漸從初始位置收斂至期望的梯形隊(duì)形,目標(biāo)編隊(duì)形成,并以期望的狀態(tài)保持飛行,其他結(jié)論與4.1節(jié)相同。
5 結(jié)論
本文針對(duì)網(wǎng)絡(luò)時(shí)滯在有界區(qū)間變化和通信拓?fù)鋭?dòng)態(tài)切換環(huán)境下的無人機(jī)編隊(duì)控制問題,在已有控制策略基礎(chǔ)上研究了其在復(fù)雜環(huán)境中控制有效的充分條件。該條件僅需利用時(shí)滯變化的上界與下界,就可通過矩陣不等式求解相關(guān)控制參數(shù),使得復(fù)雜條件下的編隊(duì)控制成為可行,且具有較大的適用性。該條件僅需對(duì)時(shí)間子區(qū)間內(nèi)固定通信拓?fù)鋱D中的連通部分進(jìn)行計(jì)算,相當(dāng)于把高維數(shù)矩陣的求解問題轉(zhuǎn)化為若干個(gè)低維數(shù)矩陣的求解問題,大幅度減小了計(jì)算量,提高了實(shí)時(shí)性。在將某些物理量的約束(如飛行速度、加速度有界等)引入后,該策略仍然有效,并且可實(shí)現(xiàn)任意形狀(對(duì)稱或非對(duì)稱)的編隊(duì)構(gòu)型。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36