某型艦船電力監(jiān)控系統(tǒng)設(shè)計(jì)缺陷與排除
2019-08-05 09:39:52郭征征
艦船電子工程 2019年7期
劉 鏑 郭征征
(91404部隊(duì) 秦皇島 066000)
1 引言
艦船電力系統(tǒng)是一個(gè)規(guī)模較小,但又十分復(fù)雜的系統(tǒng),其為艦船推進(jìn)系統(tǒng)、作業(yè)系統(tǒng)、航行設(shè)備等提供電力。電站系統(tǒng)作為艦船電力系統(tǒng)的核心,由發(fā)電機(jī)組、主配電板及電站監(jiān)控裝置等組成。在全系統(tǒng)運(yùn)行過程難免會(huì)出現(xiàn)各種故障,為確保電力系統(tǒng)的安全、穩(wěn)定運(yùn)行,確保供電連續(xù)性,提高電力系統(tǒng)的供電生命力[1],電力監(jiān)控系統(tǒng)應(yīng)運(yùn)而生。電力監(jiān)控系統(tǒng),即通過計(jì)算機(jī)或者其他通訊設(shè)備,實(shí)時(shí)監(jiān)控系統(tǒng)的運(yùn)行情況、工作狀態(tài)以及各方面的信息等。電力監(jiān)控系統(tǒng)具備多種功能,能實(shí)現(xiàn)數(shù)據(jù)的分析、處理和儲(chǔ)存,在供電配電設(shè)計(jì)中使用電力監(jiān)控系統(tǒng),可以大大地提高系統(tǒng)的工作效率、節(jié)約電力資源和消費(fèi)成本,它是供配電系統(tǒng)中十分重要的一部分[2]。艦船電力監(jiān)控系統(tǒng)更注重電力資源調(diào)配、電網(wǎng)安全保護(hù)以及監(jiān)測故障報(bào)警等,是艦船操作人員實(shí)時(shí)掌握艦船電力信息、控制電力資源提供最重要的渠道。
2 某型艦船電力系統(tǒng)
2.1 電力系統(tǒng)組成
某型艦船電力系統(tǒng)由前后2個(gè)電站,每個(gè)電站2臺(tái)柴油機(jī)發(fā)電機(jī)組成,滿足艦船進(jìn)出港、停泊、應(yīng)急、戰(zhàn)斗等各種工況下的用電需求。電站由4臺(tái)P額kW柴油發(fā)電機(jī)組,并配備有交流主配電網(wǎng)絡(luò)、事故電力網(wǎng)、蓄電池組等輔助電力設(shè)備。如圖1所示,DG1-DG4為4臺(tái)柴油發(fā)電機(jī)組,通過QF1-QF4隔離斷路器與電網(wǎng)系統(tǒng)連接,QF1具有對主干線路的保護(hù)功能。當(dāng)線路出現(xiàn)故障,能夠檢測到的兩個(gè)變化量分別是突變電流和電流方向,通過這兩個(gè)量的變化來制定相應(yīng)的判據(jù),以實(shí)現(xiàn)對主干線路的保護(hù)[3]。QF5-QF8為跨接斷路器,用于電力網(wǎng)絡(luò)組網(wǎng)和隔離。跨接斷路器的目的是為了實(shí)現(xiàn)環(huán)網(wǎng)的重構(gòu),在分組并聯(lián)的兩個(gè)發(fā)電機(jī)都故障的情況下需要通過環(huán)網(wǎng)重構(gòu)來對該組負(fù)載進(jìn)行供電,跨接斷路器能實(shí)現(xiàn)無電壓時(shí)自動(dòng)重構(gòu)和地面通電檢查完畢后的自動(dòng)斷開,整個(gè)過程實(shí)現(xiàn)了自動(dòng)化[4]。QF9為岸電斷路器,用于連接岸電的主要開關(guān)。岸電是在停泊港口或電力應(yīng)急等情況下使用,通過岸電斷路器QF9與岸上電源連接。

圖1 某型艦船電力系統(tǒng)結(jié)構(gòu)示意圖
2.2 電力系統(tǒng)運(yùn)行
任意兩臺(tái)或三臺(tái)發(fā)電機(jī)組可長期并聯(lián)運(yùn)行或轉(zhuǎn)移負(fù)荷。每臺(tái)發(fā)電機(jī)組可單獨(dú)運(yùn)行。任一臺(tái)發(fā)電機(jī)與岸電間可短期并聯(lián)帶電轉(zhuǎn)移負(fù)荷。電站采取機(jī)電集控室(通用監(jiān)控管理臺(tái))、主配電板室(機(jī)組控制器)和機(jī)旁(機(jī)旁控制箱)三級(jí)監(jiān)控。同時(shí)采取分級(jí)保護(hù)措施,使系統(tǒng)故障時(shí)將其影響限制在最小范圍。電機(jī)增減順序按照預(yù)先設(shè)定的優(yōu)先級(jí),優(yōu)先級(jí)高的電機(jī)優(yōu)先并入或減退,優(yōu)先級(jí)低的電機(jī)在優(yōu)先級(jí)增減后或因故障無法增減的情況下逐級(jí)增減。電站控制方式根據(jù)自動(dòng)化控制程度分為手動(dòng)、半自動(dòng)、自動(dòng)和集控。QF1-QF4隔離斷路器是電站并網(wǎng)或隔離的控制開關(guān),決定了電力系統(tǒng)的供電電機(jī),也對電力系統(tǒng)網(wǎng)能夠起到保護(hù)作用;QF5-QF8跨接斷路器,用于前后電站的并網(wǎng)重構(gòu)或者隔離,對電力體統(tǒng)網(wǎng)絡(luò)具有保護(hù)作用。
3 問題的提出
3.1 試驗(yàn)現(xiàn)象
在自動(dòng)控制模式下,進(jìn)行1號(hào)機(jī)組的逆功保護(hù)試驗(yàn),當(dāng)時(shí)的在網(wǎng)機(jī)組為1、2、3號(hào)機(jī)組,備用機(jī)組優(yōu)先順序設(shè)置為1、3、2、4。在機(jī)組控制器上,通過手動(dòng)調(diào)節(jié)1號(hào)機(jī)組轉(zhuǎn)速,使得1號(hào)機(jī)組出現(xiàn)逆功保護(hù)。在試驗(yàn)進(jìn)行時(shí),出現(xiàn)了全艦失電,引起部分電子儀器儀表設(shè)備等出現(xiàn)故障,其他相關(guān)試驗(yàn)無法繼續(xù)進(jìn)行。
3.2 故障分析
當(dāng)時(shí)由于試驗(yàn)任務(wù)的需要,艦上部分設(shè)備關(guān)機(jī),使得艦上負(fù)載保持在700kW左右。按照電力監(jiān)控自動(dòng)減機(jī)程序判斷準(zhǔn)則,此時(shí)在網(wǎng)負(fù)載已經(jīng)低于兩機(jī)自動(dòng)減機(jī)規(guī)定負(fù)載750kW,更遠(yuǎn)遠(yuǎn)低于三機(jī)并網(wǎng)條件。在電力監(jiān)控系統(tǒng)的自動(dòng)控制下,2號(hào)機(jī)組由于優(yōu)先級(jí)別低,率先進(jìn)入減機(jī)程序,減速退出;在網(wǎng)機(jī)組變?yōu)?號(hào)和3號(hào)機(jī)組,在網(wǎng)負(fù)載達(dá)不到兩機(jī)并網(wǎng)條件,3號(hào)機(jī)組也自動(dòng)進(jìn)入減機(jī)程序,減速退出。此時(shí)1號(hào)機(jī)組逆功跳閘,3號(hào)機(jī)繼續(xù)執(zhí)行自動(dòng)減機(jī)程序,造成全船失電。根據(jù)故障現(xiàn)象,檢查電力監(jiān)控故障記錄信息,可以判定是由于電力監(jiān)控自動(dòng)減機(jī)程序判斷準(zhǔn)則設(shè)計(jì)存在一定缺陷,沒有充分考慮此等情況,將原有準(zhǔn)則上增加條件:當(dāng)雙機(jī)并網(wǎng)過程中,在網(wǎng)負(fù)載小于雙機(jī)并網(wǎng)規(guī)定功率,而優(yōu)先級(jí)別高的機(jī)組出現(xiàn)故障被隔離時(shí),另一機(jī)組應(yīng)立即停止減機(jī)程序,繼續(xù)在網(wǎng)供電。
4 仿真實(shí)驗(yàn)
4.1 模擬故障實(shí)驗(yàn)
基于Matlab軟件中Simulink仿真平臺(tái),利用SimPowerSystems庫中的電力、電子元器件建模,按照原有的電力監(jiān)控自動(dòng)減機(jī)程序判斷準(zhǔn)則,對逆功保護(hù)試驗(yàn)出現(xiàn)的逆功保護(hù)進(jìn)行模擬試驗(yàn),采集電網(wǎng)中的電壓、電流。如圖2所示,圖上部分為電壓變化情況,下部分為電流變化情況。根據(jù)判定準(zhǔn)則的規(guī)定,3號(hào)機(jī)組在2.8s左右執(zhí)行減機(jī)程序,并在1號(hào)機(jī)組逆功跳閘后未停止減機(jī),繼續(xù)執(zhí)行退出命令,從而整個(gè)電網(wǎng)中電壓、電流快速趨于零,造成全船失電。

圖2 模擬故障時(shí)電壓電流變化圖
全艦失電一定時(shí)間間隔后,電網(wǎng)將進(jìn)入失電自啟動(dòng)程序,優(yōu)先級(jí)高的機(jī)組將自動(dòng)啟動(dòng),并網(wǎng)運(yùn)行,電力系統(tǒng)將恢復(fù)供電,仿真實(shí)驗(yàn)中不作相關(guān)描述。
4.2 對比實(shí)驗(yàn)
根據(jù)前期的分析,修改相應(yīng)的自動(dòng)減機(jī)程序判斷準(zhǔn)則,并利用電力系統(tǒng)模型進(jìn)行修改準(zhǔn)則后的仿真實(shí)驗(yàn),同樣采集電網(wǎng)中的電壓、電流,觀察其變化情況。可以從圖3中看出,在1號(hào)機(jī)組逆功保護(hù)跳閘后,電網(wǎng)未出現(xiàn)全艦失電。由于全網(wǎng)負(fù)荷達(dá)不到兩機(jī)并網(wǎng)運(yùn)行,3號(hào)機(jī)組執(zhí)行減機(jī)程序,而在此時(shí),唯一在網(wǎng)供電的1號(hào)機(jī)組出現(xiàn)逆功跳閘,電網(wǎng)中電壓、電流出現(xiàn)短暫震蕩后,3號(hào)機(jī)組并未退出電網(wǎng),繼續(xù)為電網(wǎng)供電,整個(gè)過程中不會(huì)出現(xiàn)全船失電的類似情況。
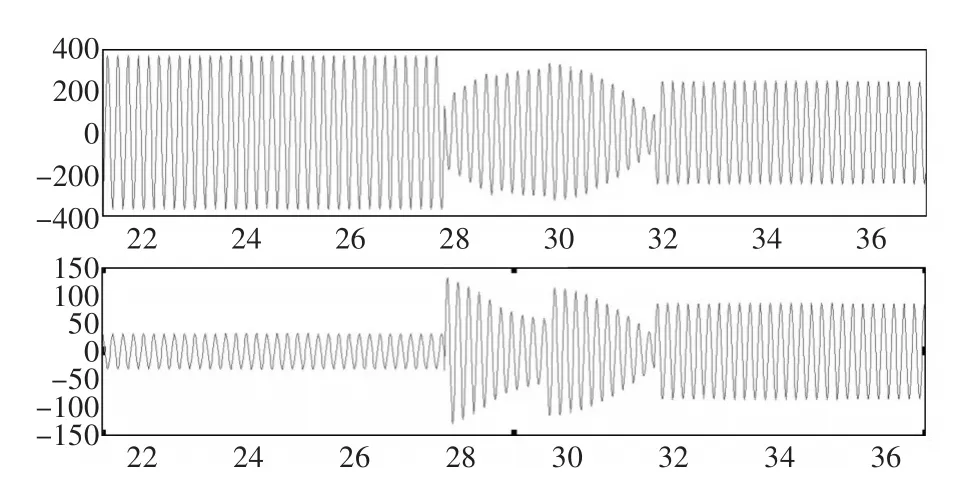
圖3 修改準(zhǔn)則后故障時(shí)電壓電流變化圖
5 缺陷排除
排除艦船硬件故障的方法很多,當(dāng)前基于人工神經(jīng)網(wǎng)絡(luò)、粗糙集理論、信息融合技術(shù)的智能故障診斷技術(shù)得到了飛速的發(fā)展和較好的應(yīng)用[5],然而在檢測艦船設(shè)計(jì)缺陷方面的方法、手段卻寥寥無幾。設(shè)計(jì)缺陷問題通常是事后發(fā)現(xiàn)、事后分析、事后解決,發(fā)生問題后可采用分析論證、形成解決方案、仿真試驗(yàn)、試驗(yàn)驗(yàn)證等幾個(gè)步驟,可參看圖4。在解決設(shè)計(jì)缺陷問題方面,應(yīng)當(dāng)著重注意以下幾個(gè)方面的內(nèi)容:1)設(shè)計(jì)之初充分論證。在設(shè)計(jì)之初,應(yīng)當(dāng)充分全面的考慮,對可能存在的問題提出相應(yīng)的應(yīng)對措施,減少出現(xiàn)設(shè)計(jì)缺陷問題后所帶來的風(fēng)險(xiǎn)性。2)試驗(yàn)檢驗(yàn)時(shí)切忌以偏概全。無論是陸上聯(lián)調(diào)試驗(yàn)、系泊航行試驗(yàn),還是鑒定定型試驗(yàn),都要充分考慮不同環(huán)境、不同條件下的試驗(yàn),本著發(fā)現(xiàn)、解決問題的態(tài)度做試驗(yàn),積極正視和勇于發(fā)現(xiàn)試驗(yàn)中的問題。3)分析問題時(shí)運(yùn)用科學(xué)方法。在解決分析問題中,科學(xué)合理地運(yùn)用分析方法,比如排除法、等效模型法等,排除無關(guān)緊要的干擾條件,尋找問題根本,經(jīng)過分析論證后形成解決方案。4)仿真實(shí)驗(yàn)反復(fù)驗(yàn)證。在初步判定設(shè)計(jì)缺陷問題后,不要急于解決問題,應(yīng)當(dāng)借助相應(yīng)的仿真工具,進(jìn)行充分、反復(fù)的實(shí)驗(yàn)驗(yàn)證。5)通過試驗(yàn)進(jìn)一步論證。經(jīng)過仿真實(shí)驗(yàn)充分驗(yàn)證后,再在艦船上試驗(yàn)驗(yàn)證,直到問題完全解決。

圖4 排除缺陷問題的方法步驟
6 結(jié)語
在技術(shù)廠家修改完善自動(dòng)減機(jī)程序判定準(zhǔn)則后,再次進(jìn)行了逆功保護(hù)試驗(yàn),經(jīng)過分析,當(dāng)時(shí)的2號(hào)機(jī)組為全船失電的干擾因素,故在后續(xù)試驗(yàn)中不考慮2號(hào)機(jī)組。1號(hào)、3號(hào)機(jī)組在網(wǎng),在3號(hào)機(jī)組減速過程中,調(diào)節(jié)1號(hào)機(jī)組轉(zhuǎn)速,直到其逆功保護(hù)跳閘,3號(hào)機(jī)組立即停止減速,繼續(xù)在網(wǎng)供電,未出現(xiàn)全艦失電,應(yīng)證了仿真試驗(yàn)的正確性。
通過判定準(zhǔn)則的修改,彌補(bǔ)了該型艦船電力監(jiān)控系統(tǒng)設(shè)計(jì)缺陷,減少了全艦失電的可能性,有效地保障了電力系統(tǒng)的可靠運(yùn)行,增強(qiáng)了該型號(hào)艦船戰(zhàn)斗力,同時(shí)為其他艦船電力監(jiān)控系統(tǒng)設(shè)計(jì)的全面性提供了相應(yīng)案例。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
