聯(lián)合GPS與二元水聲定位系統(tǒng)的目標(biāo)定位方法
2019-07-18 05:58:14崔劍鋒祝令國張惠文
測試技術(shù)學(xué)報(bào) 2019年4期
崔劍鋒,劉 洋,祝令國,徐 翔,張惠文
(1.山西汾西重工,山西 太原 030000;2.大連測控技術(shù)研究所,大連 116013)
0 引 言
聲波是水下信息傳播的有效載體,也是目前實(shí)現(xiàn)水下目標(biāo)定位最有效的手段.GPS利用電磁波進(jìn)行定位,精度高,但對于水下目標(biāo)無能為力.將GPS和水聲定位系統(tǒng)結(jié)合起來,即可以確定水下目標(biāo)的絕對位置.
1 二元式水聲定位系統(tǒng)
二元式水聲定位系統(tǒng)模型簡單有效,是科研活動(dòng)及工程實(shí)際中較為常用的一種定位合作式定位方法.
設(shè)兩陣元的陣元位置為(L/2,0)與(-L/2,0),L為基陣長度,坐標(biāo)系正向指向船艏方向,則可以推知合作式目標(biāo)的平面坐標(biāo)為
(1)
進(jìn)而可以求得目標(biāo)距離陣中心的距離和目標(biāo)相對于船艏方向的方位角(即目標(biāo)方向向量與船艏方向向量的夾角)
(2)
式中:d1,d2為目標(biāo)到陣元的距離,由發(fā)射時(shí)間及檢波時(shí)延可以求出.平面波情況下的算式可以得到進(jìn)一步簡化[1].
二元式水聲定位系統(tǒng)應(yīng)特別注意兩點(diǎn):① 方位模糊.直觀的以式(1)為例,方位模糊指二元式定位系統(tǒng)解出的y實(shí)際是絕對值,真實(shí)的y坐標(biāo)可以為負(fù),因此此處的方位模糊也稱為左右舷模糊.工程實(shí)際中,目標(biāo)位于船的左舷或右舷通常是先驗(yàn)信息,由此唯一地確定y坐標(biāo).② 求解方位角.求解方位角可以利用反三角函數(shù)進(jìn)行求解,因此可以有多種選擇,但應(yīng)注意這類函數(shù)具有不同的值域,如函數(shù)選擇不當(dāng)會(huì)造成求解結(jié)果錯(cuò)誤,上述二元式水聲定位系統(tǒng)的輸出方位角范圍為[0,π],據(jù)此選用反余弦函數(shù)進(jìn)行計(jì)算.
2 水下目標(biāo)的聯(lián)合定位
要確定水下目標(biāo)的絕對位置,需要以下輸入?yún)?shù):船的絕對位置(即水聲定位系統(tǒng)的絕對位置),船艏向(設(shè)定水聲定位系統(tǒng)坐標(biāo)系x正向與船艏向一致),水聲定位系統(tǒng)給出的目標(biāo)相對方位、目標(biāo)相對距離;另外需要已知試驗(yàn)海區(qū)位置的地球半徑.
船的絕對位置可由船載GPS給出,船艏向可由羅經(jīng)給出,目標(biāo)相對方位、相對距離由水聲定位系統(tǒng)給出,地球半徑可代入平均值計(jì)算.
計(jì)算目標(biāo)的絕對位置首先應(yīng)理順坐標(biāo)方向與方位.船艏向是以正北為零度,順時(shí)針旋轉(zhuǎn)增加到360°.同樣定義船坐標(biāo)系下,艏向?yàn)橄鄬α愣龋槙r(shí)針(即右舷)為正增加到180°,逆時(shí)針為負(fù)(即左舷)減小到-180°;據(jù)此,當(dāng)目標(biāo)位于右舷時(shí),相對方位角為正值,位于左舷時(shí),相對方位角為負(fù)值.
由圖1 所示,α為目標(biāo)與船艏夾角(右舷為正,左舷為負(fù));β為船艏向;d為目標(biāo)與船的相對距離.此試驗(yàn)海區(qū)位于北半球、東半球,虛線為緯度線與經(jīng)度線,則定義:θ=α+β,則將船坐標(biāo)系旋轉(zhuǎn)為平行于經(jīng)緯度線的坐標(biāo)系,計(jì)算得到新坐標(biāo)系下的目標(biāo)相對位置
(3)
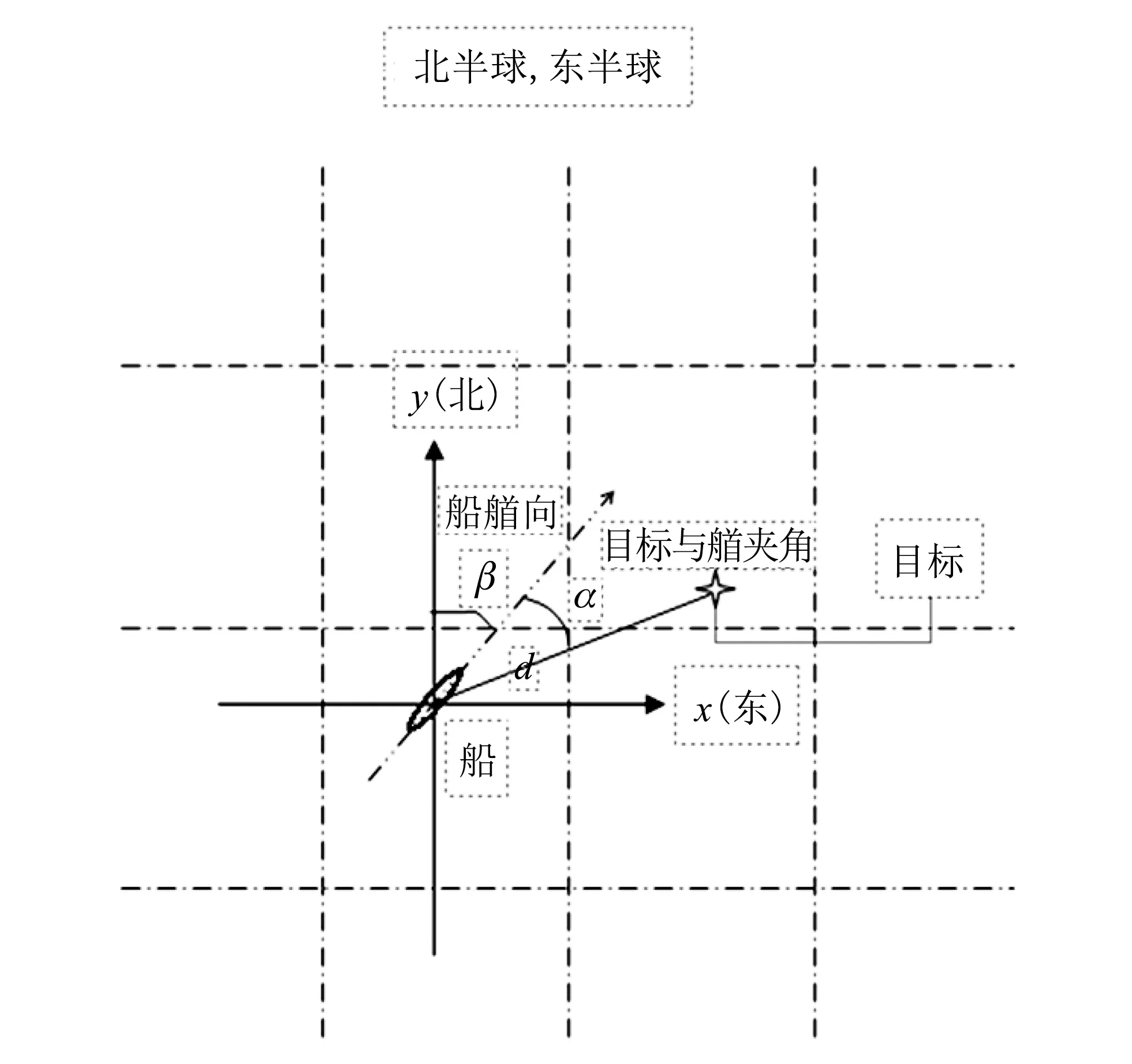
圖1 目標(biāo)與船艏夾角Fig.1 The angle of target and bow
當(dāng)θ順時(shí)針為正(即順時(shí)陣旋轉(zhuǎn)增加)時(shí),對4個(gè)象限(順時(shí)針依次定義4個(gè)象限,不同于通常的逆時(shí)針依次定義4個(gè)象限)驗(yàn)證,圖2 中為θ以y軸為軸順時(shí)針旋轉(zhuǎn)所得角度,θ′是相應(yīng)的θ所在方向與y軸所夾的銳角:
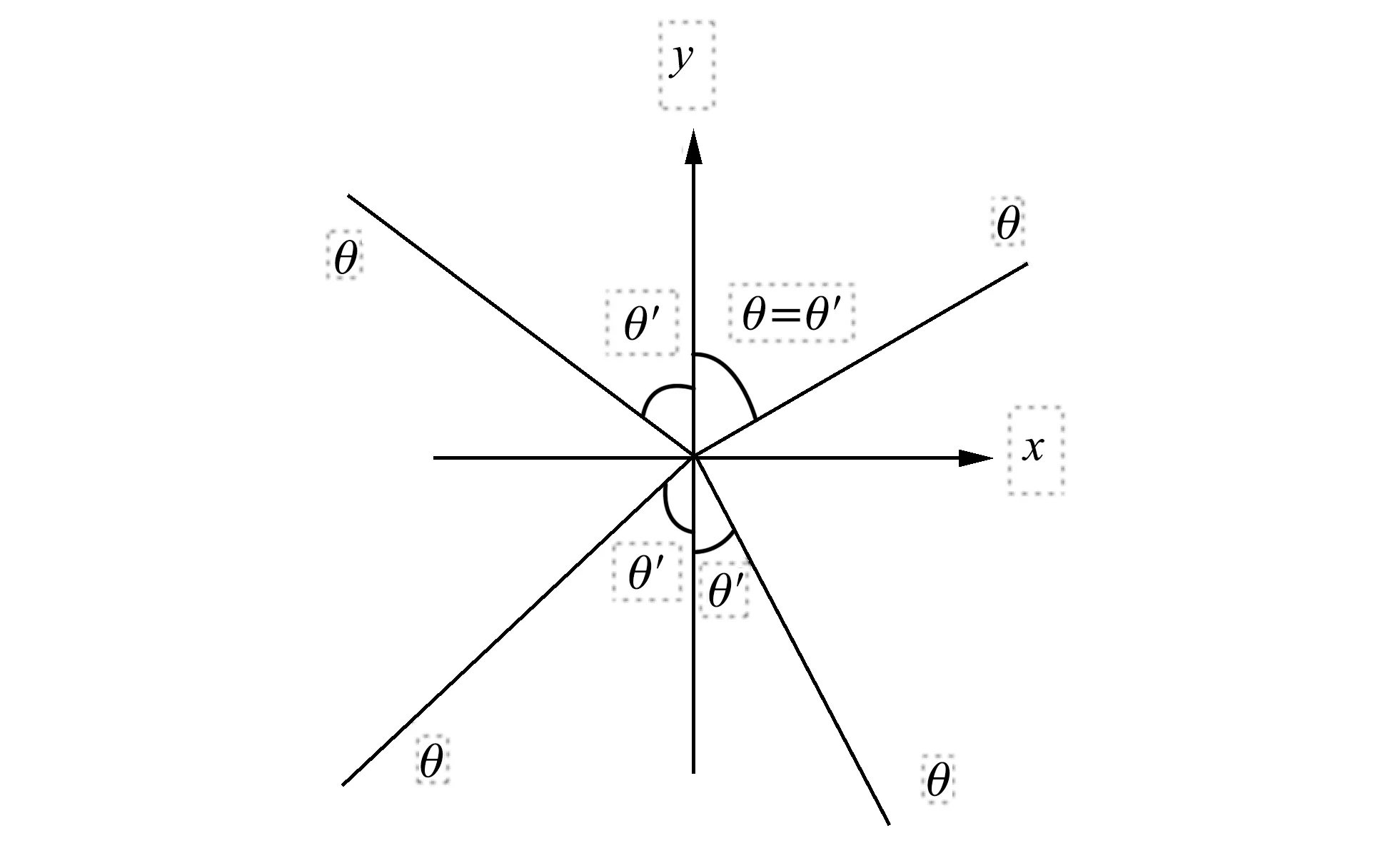
圖2 角度示意圖Fig.2 Sketch map of angle
一象限
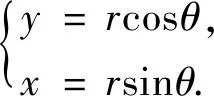
(4)
二象限
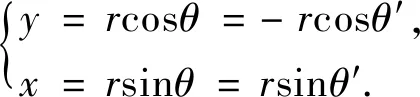
(5)
三象限
(6)
四象限
(7)
由上可知相對坐標(biāo)系與東、北半球經(jīng)緯度正方向一致,因此得到目標(biāo)的絕對位置為
(8)
(9)
式中:N1與E1為船的經(jīng)緯度;N2與E2為目標(biāo)經(jīng)緯度.
對定位系統(tǒng)基線與船艏向存在夾角的情況進(jìn)行補(bǔ)充說明:一般而言,二元式水聲定位系統(tǒng)的基線正向與船艏向平行,但也可能存在特殊安裝或安裝誤差導(dǎo)致基線正向與船艏向也存在一個(gè)夾角,此時(shí)圖2 中標(biāo)記“目標(biāo)與艏向夾角”即分解成兩個(gè)部分:基線與船艏向的夾角加上目標(biāo)與基線的夾角.需要說明的是:此時(shí),基線與船艏向的夾角需人為判定,基線位于船的右舷為正、左舷為負(fù);目標(biāo)方向與基線的夾角也需要人為判定,目標(biāo)方向位于基線右側(cè)為正、左側(cè)為負(fù).依此規(guī)律將目標(biāo)與艏向的夾角分解加和即可.
3 誤差分析
在上述聯(lián)合定位方法中,影響目標(biāo)絕對位置定位精度的因素包括GPS定位誤差和水聲定位系統(tǒng)誤差兩個(gè)基本誤差輸入源[2-3].
3.1 二元水聲定位系統(tǒng)的誤差空間分布特性
對于二元水聲定位系統(tǒng),存在一種觀點(diǎn),即在基陣的小角度方位角上,由于基陣投影孔徑變小,目標(biāo)的定位精度可能會(huì)比較低.可以基于數(shù)值統(tǒng)計(jì)的方法求出定位系統(tǒng)的誤差空間分布特性,從而對這一問題進(jìn)行說明.
輸入誤差項(xiàng)包括兩項(xiàng):一是基陣位置標(biāo)定誤差,一是時(shí)延測量誤差.基陣位置誤差又包括陣元間距誤差和陣軸、船軸夾角誤差.時(shí)延測量誤差又包括同步時(shí)鐘誤差和檢波誤差.
陣元間距誤差、時(shí)延測量誤差通過解算方程間接影響目標(biāo)的距離、方位角,陣軸、船軸夾角誤差則直接影響目標(biāo)方位角.
設(shè)定時(shí)延測量誤差和基陣測量誤差,誤差空間分布特性如圖3~圖6 所示.時(shí)延測量誤差為(-1,1)m,基陣長測量誤差為(-0.05,0.05)m.x軸方向?yàn)榛囕S所在方向,二元陣解算結(jié)果包括目標(biāo)的直角坐標(biāo)值、目標(biāo)方位角、目標(biāo)絕對距離4個(gè)值,各自的誤差空間分布特性都不相同.在綜合測量誤差的影響下,x坐標(biāo)的誤差值呈同心圓擴(kuò)大;y坐標(biāo)值具有明顯的指向性,在方位角小角度方向上測量誤差較大;方位角測量值與y坐標(biāo)有相同的趨勢,在小角度方位角上測量誤差大,不同于y坐標(biāo)誤差的是在同一個(gè)方位角上測量誤差是一致的,空間分布特性呈現(xiàn)放射狀;距離誤差是幾項(xiàng)計(jì)算值中最穩(wěn)定、最小的,在相同的綜合誤差下,距離誤差在全空間具有誤差一致性.
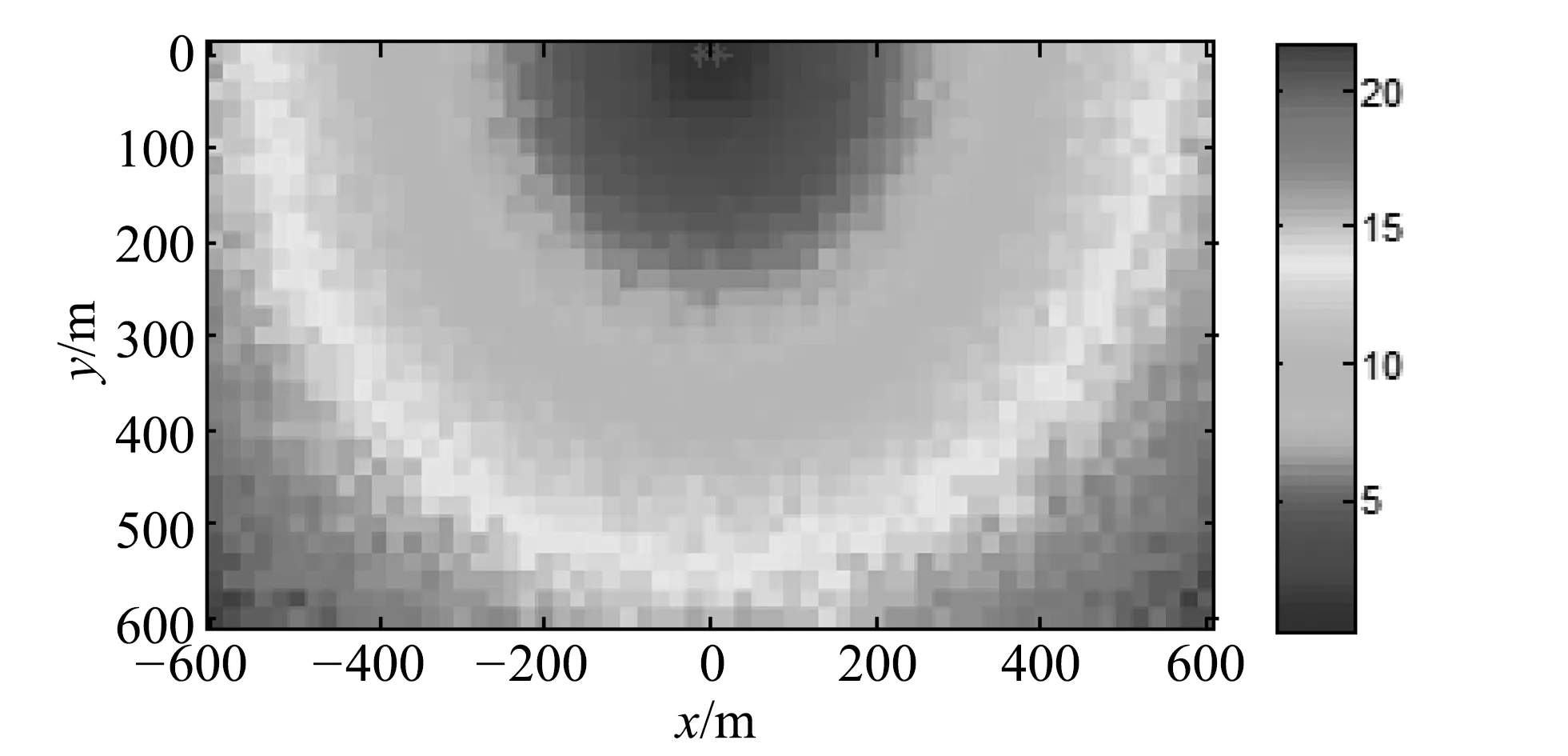
圖3 x坐標(biāo)誤差Fig.3 Error of x
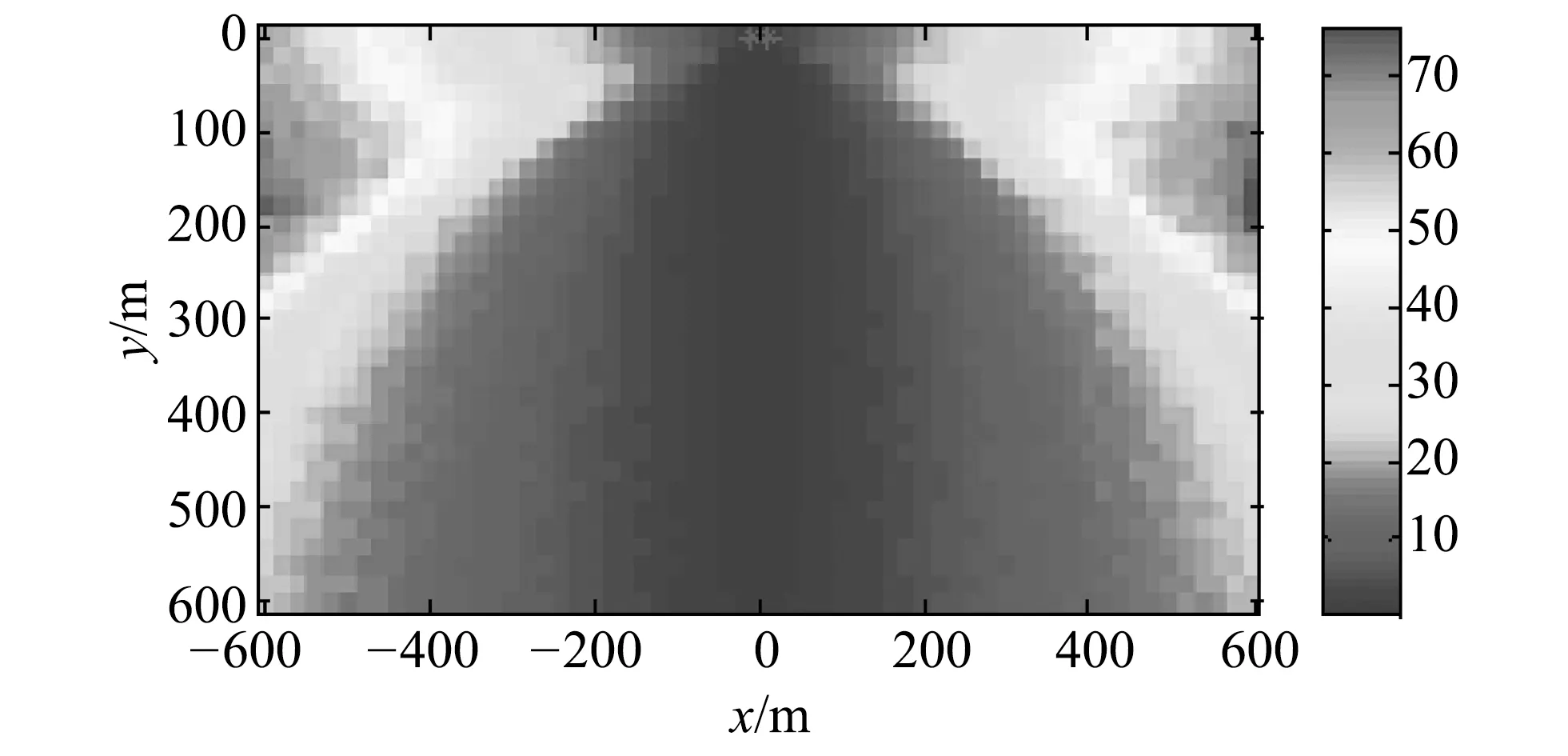
圖4 y坐標(biāo)誤差Fig.4 Error of y

圖5 角度測量誤差Fig.5 Error of angle
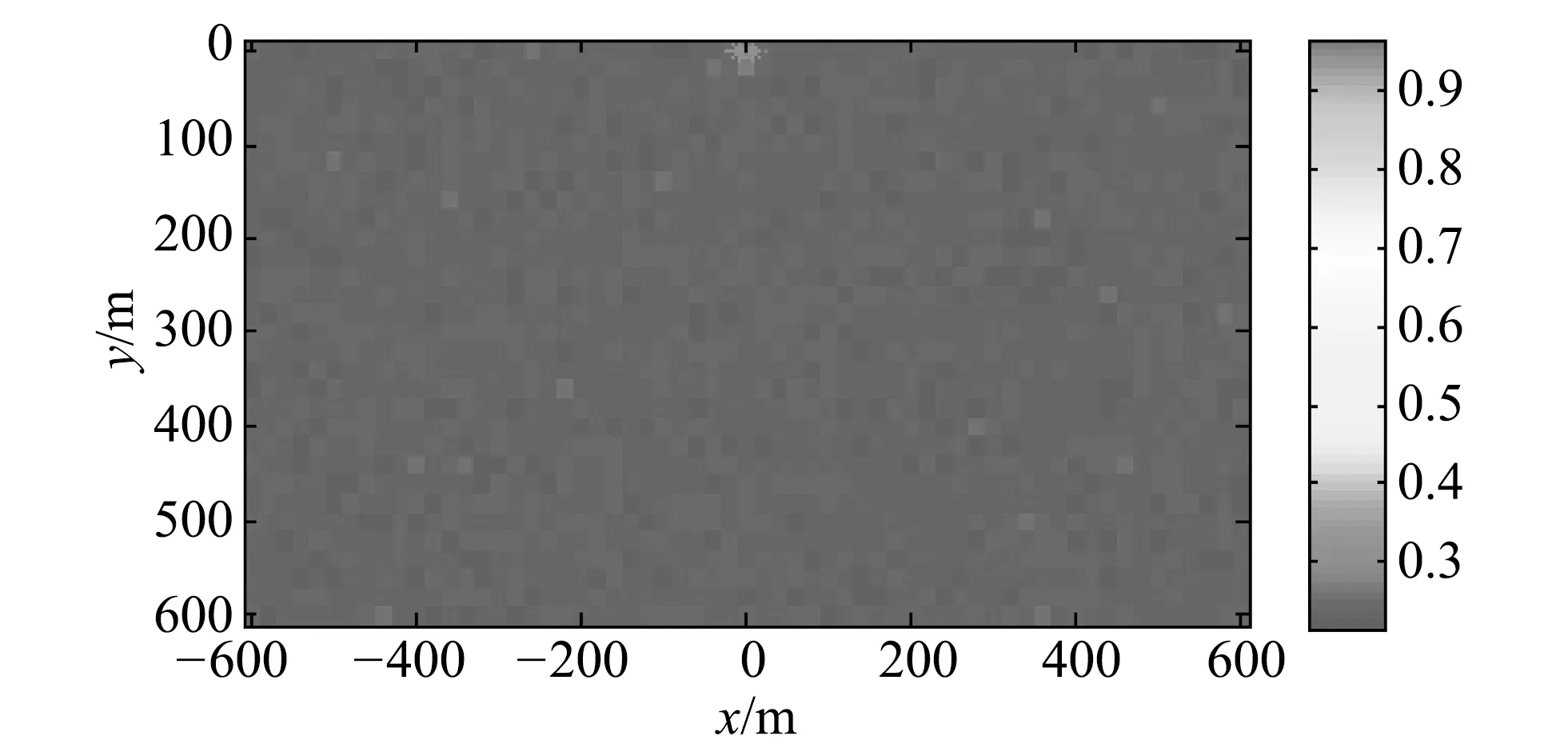
圖6 距離測量誤差Fig.6 Error of distance
因此,對方位角的測量值,前述觀點(diǎn)是正確的,在小角度方位角上,方位角測量精度低于正橫方向.其他的測量值則各有規(guī)律,不能一概而論.
3.2 聯(lián)合定位解算的誤差影響因素
聯(lián)合定位解算程序中將地球簡化為正球體,需要分析由此造成的誤差影響有多大.以北緯30°附近為例進(jìn)行分析.地球半徑分別取6 400 km與6 371.393 km,計(jì)算兩點(diǎn)的距離誤差.
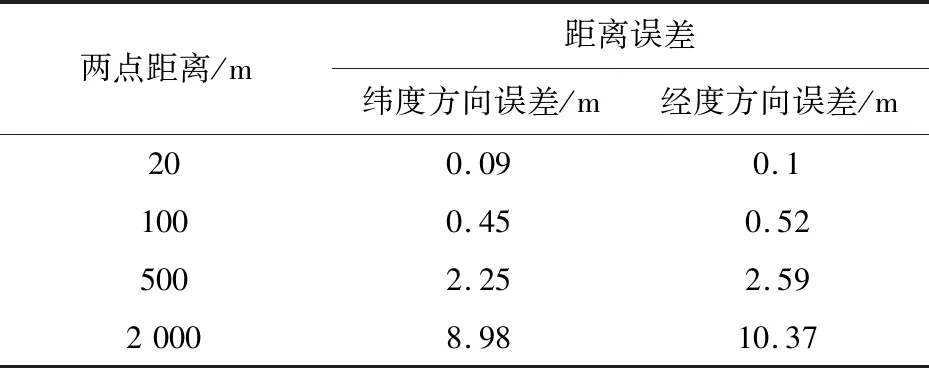
表1 地球半徑造成的兩點(diǎn)間距離解算誤差Tab.1 Distance error influenced by earth radius
分析表1 即可確定,在公里級以內(nèi)的聯(lián)合定位中,相較于一般的待測目標(biāo),地球半徑造成的解算誤差是比較微小、可以忽略的.
聯(lián)合解算程序中根據(jù)原點(diǎn)經(jīng)緯度、相對偏角、相對距離3類參量解算目標(biāo)經(jīng)緯度.由以上分析知道相對距離的誤差較小,而原點(diǎn)經(jīng)緯度由高精度差分GPS直接測得,因此主要誤差集中在相對偏角產(chǎn)生的誤差中.
相對偏角由測量船航向角和水聲測量系統(tǒng)測得的目標(biāo)方位角相加得到,根據(jù)弧長公式d=r·θ·π/180,以距離200 m的目標(biāo)為例分析誤差,如圖7所示.
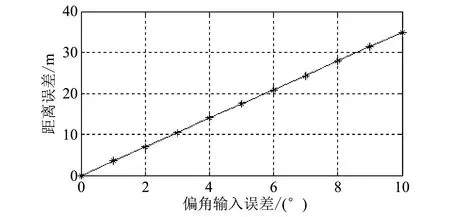
圖7 距離誤差與偏角的關(guān)系Fig.7 Distance error changes with angle departure
4 結(jié) 論
對于水下定位系統(tǒng):① 船載二元式水聲定位系統(tǒng)存在左右舷模糊的問題;② 解算適宜采用反余弦函數(shù).
在水下目標(biāo)的聯(lián)合定位解算中,須知:① 測量船的絕對位置(由GPS直接測量得知);測量船的船艏向(由船載羅盤等儀器測量得知);② 水下目標(biāo)相對于測量船的方位、距離(由二元式水下定位系統(tǒng)得知).在解算中需要理清船左右舷、聲學(xué)基陣左右側(cè)與解算程序輸入角度參數(shù)的關(guān)系.
二元式水下定位系統(tǒng)的誤差空間分布特性分析表明:基陣軸向坐標(biāo)測量誤差成同心圓規(guī)律;基陣法向坐標(biāo)測量誤差在小角度下測量比較大;目標(biāo)距離測量誤差在全空間呈現(xiàn)一致性;目標(biāo)方位角測量誤差在基線小角度下的誤差值較大、在空間上呈放射狀.
在聯(lián)合定位解算過程中,地球半徑的代入誤差對結(jié)果的影響較小,短距離內(nèi)可以忽略,偏角誤差對定位結(jié)果的影響呈線性,可認(rèn)為是主要的輸入誤差項(xiàng).