自主回收UUV水聲定位與遙測遙控導引技術研究
2019-06-28 07:55:30付傳寶段文海張先奎宋文生童賽美
數字海洋與水下攻防 2019年2期
付傳寶,段文海,張先奎,宋文生,童賽美
(1.昆明船舶設備研究試驗中心,云南 昆明650051;2.中國電子科技集團公司第三十四研究所,廣西桂林541004)
0 引言
近年來,無人水下航行器(Unmanned Underwater Vehicle,UUV)相關的各項技術發展迅猛(包括UUV回收技術),UUV已經成功應用于海底地形探測,海域監視、偵查和警戒,情報搜集,掃雷,海底管道故障檢測,以及油田勘探等商業領域。同時,UUV在各國軍事力量中扮演著越來越重要的角色,在現實海戰中正發揮著不可替代的作用,UUV已被應用于情報偵察、反水雷、輔助通信、后勤支援和補給等軍事領域[1-3]。
由于UUV 執行水下任務時的能源通常需要自帶,所以有限的自帶能源就限制了UUV的航行距離和工作時間,因此,需要在UUV 任務結束或能源不足時對其進行回收,來下載任務數據或補充能源。布放和回收對于UUV的水下作戰能力和續航能力等是至關重要的。通常將UUV回收方式分為2種:水面回收和水下回收。水面回收易受海情的影響,而且在執行軍事任務時易暴露,而水下回收不影響母船的運動狀態,效率更高,隱蔽性更好。但水下環境復雜,以及水壓和碰撞對其帶來的破壞,要求母船精準地掌握UUV的航行軌跡等參數才能完成對接,從而順利地回收。
UUV水下回收時近端一般采用高頻圖像聲吶、光學導引捕獲、管道爬行輔助裝置等設備聯合回收UUV,但UUV中近程的航行軌跡等參數也是對接成功的關鍵數據,因此,母船必須配備可獲取UUV航行軌跡、姿態等參數的水聲定位與遙測遙控導引設備[4]。
課題組對水聲定位與遙測遙控導引技術進行了深入的研究,完成了水聲定位與遙測遙控導引系統方案,設計了一種水聲定位與遙測遙控互相兼容的信標體制。課題組重點研究了MFSK、OFDM、擴頻等水聲遙測遙控調制方式,通過分析和對比,設計了一種正交混合擴頻調制方式,并采用相干二維搜索技術,提高擴頻技術多普勒補償能力。
1 水聲定位與遙測遙控導引技術系統組成與技術方案
1.1 系統工作原理
UUV自主回收系統工作原理示意圖如圖1所示,虛線框內非本文研究內容。安裝于UUV上的導引信標采用低功耗設計,在UUV執行任務時處于休眠狀態,當執行回收任務時才真正啟動,發出水聲定位與遙測信號;母船通過USBL基陣接收水聲信號,經信號處理器、解調解碼器等處理解算出UUV定位與航行參數信息,依據UUV定位與航行參數信息采用波束旋轉控制方式定向發送給UUV遙控指令,完成遠程導引控制。當UUV運動到母船近程時,啟動高頻圖像聲吶、虛擬3D光學成像及顯示系統等,精準導引、控制管道爬行輔助裝置完成UUV捕獲及回收。
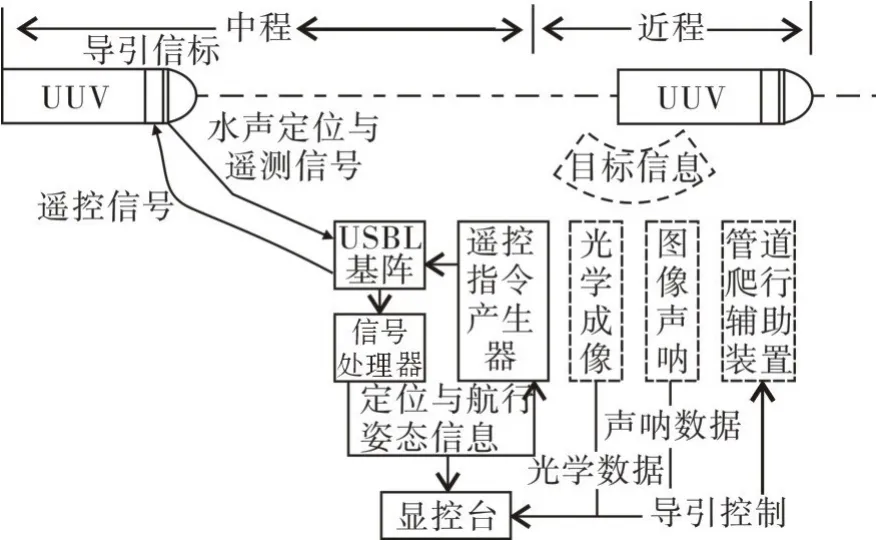
圖1 UUV自主回收系統工作原理示意圖Fig.1 Principle schematic diagram of UUV self-recovery system
1.2 系統組成與方案設計
1.2.1 系統組成
水聲定位與遙測遙控導引系統主要由艇端設備與UUV端設備組成,如圖2。艇端設備包括USBL基陣、信號預處理器、DSP處理器、顯控機、編碼調制器、功率放大器、發射換能器等;UUV端設備包括導引信標、信號預處理器、DSP處理器、編碼調制器、功率放大器、發射換能器等。

圖2 水聲定位與遙測遙控導引系統組成示意圖Fig.2 Composition schematic diagram of underwater acoustic location and telemetry and remote control guidance system
水聲定位與遙測遙控導引系統完成2個功能:1)完成母船對UUV定位及航行參數的實時聯合測量;2)完成母船對 UUV實時遙控。母船對UUV定位及航行參數的實時聯合測量時,UUV端經編碼調制器將遙測信息編碼調制,經功率放大器放大后由發射換能器發出;艇端通過聲學基陣接收定位與航行參數水聲信號,信號預處理器將接收的水聲信號經過放大、濾波、包絡檢波等處理后,送DSP處理器;DSP處理器完成信號檢測解調、單頻頻率判別、時延估計、增益控制及數據傳送等功能,并將解調信息、時差數據等通過RS422口傳送給顯控機;顯控機負責實現UUV軌跡解算與描繪、航行參數的解碼與UUV航行參數3D顯示等功能。母船對UUV實時遙控時,艇端經編碼調制器將遙控指令編碼調制,經功率放大器放大后由發射換能器發出;UUV端通過接收換能器接收遙控水聲信號,接收的水聲信號經信號預處理器、DSP處理器等組件解調解碼后,將遙控指令傳送到執行機構。聲學基陣采用超短基線陣,根據UUV定位與航行參數遙測的需求進行信標體制的設計。
1.2.2 定位與遙測信標體制設計
在滿足UUV航行姿態數據遙測功能的同時要求調制信號需具備較好的抗反射與疊加的能力,遙測周期為1 s,定位周期為0.2s。
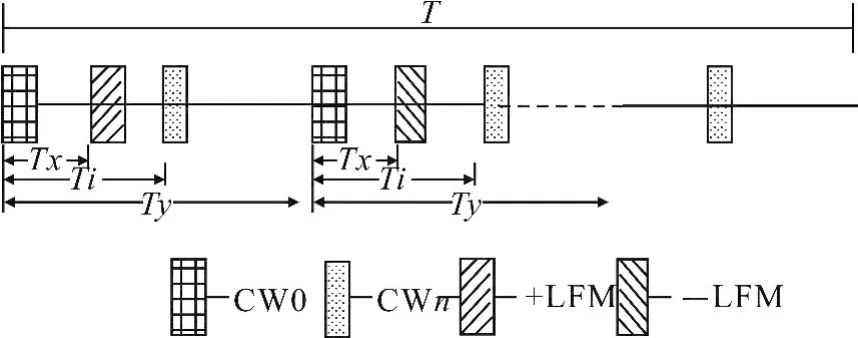
圖3 定位與遙測聯合測量信標體制示意圖Fig.3 Signal system schematic diagram for location and telemetry
遙測信標體制示意圖如圖3所示,采取1幀3行的形式,幀同步周期為T=1 s,行同步周期為Ty=0.2 s,同步保護間隔Tx=50 ms,Ti(i=1,2,3,4)為遙測信息的時延粗調值。CW 0為脈寬4 ms頻率為f0的單頻脈沖;+LFM代表幀識別脈沖,為脈寬5 ms線性正調頻,以f0為中心頻率,帶寬為6 kHz;-LFM代表行識別脈沖,為脈寬5 ms線性負調頻,以f0為中心頻率,帶寬為6 kHz;CW n(n=1,2,3,4)代表遙測信息的頻率細調脈沖,為4 ms的單頻信號。定位信息通過對CW 0脈沖的時延估計,結合USBL定位解算算法得出。遙測信息包括航向、深度、橫滾角度和縱傾角度等,其粗調值由Ti值解算出,細調值由CW n載波頻率解算出。
1.2.3 遙控信標體制設計
遙控信號調制方式采用正交多載波擴頻調制方式,此調制方式由于子載波間的正交性,保證了載波間的互不干擾,由于子載波間的相互重疊,保證了最優的頻譜利用率,另外此方式引入了擴頻機制,有效地提高了遙控信號的傳輸隱蔽性[5-6]。
體制初步設計分為地址碼、指令信息碼和信息確認碼3部分,可以滿足識別多個以上目標要求、多條指令要求,減少誤碼率。其中地址碼用于識別需要遙控的目標,指令信息碼用于識別同一目標的指令,地址碼和指令信息碼通過正交混合擴頻調制方式調制發出。如圖4所示,t為地址碼和指令信息碼之間的保護間隔,為抵消碼間干擾,地址碼和指令信息碼里面的頻率脈沖也會采用適當的保護間隔,同時為了加強系統可靠性,在信標體制中加入信息確認碼。
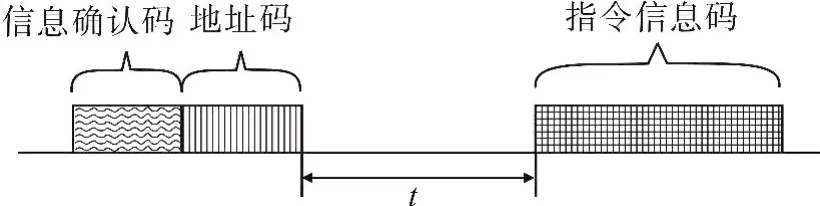
圖4 遙控信標體制示意圖Fig.4 Signal system schematic diagram for remote control
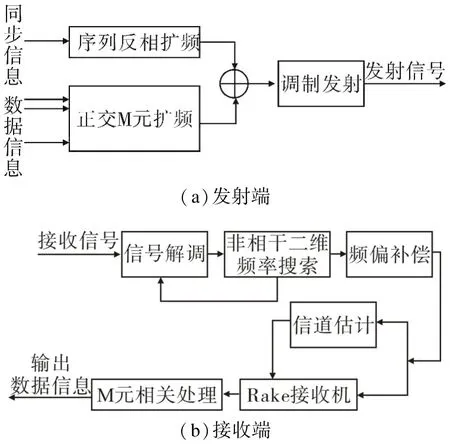
圖5 水聲遙控系統原理框圖Fig.5 Principle block diagram of underwater acoustic remote control system
UUV水聲遙控技術主要解決的問題是如何實現多普勒跟蹤和補償,如何克服多途衰落信道。針對這2個問題,系統采用擴頻通信技術。為實現多普勒的實時跟蹤與補償,我們提出非相干二維搜索技術;為克服多途衰落信道,我們提出改進的Rake接收技術。系統框圖如圖5所示,圖5(a)為系統發射原理框圖,圖5(b)為接收原理框圖。
2 關鍵技術及突破途徑
2.1 低信噪比弱信號檢測技術研究
課題組著重研究了時延頻率估計、噪聲抑制、信號幅度自動均衡等接收端數字信號檢測處理方法。
時延估計利用自適應更新樣本相關的方法,提高時延估計精度,再進行時延值精密內插,從而保證時延估計精度。頻率估計采用基于FFT的插值頻率估計算法,插值采用拉格朗日與最小二乘擬合算法。
采用小波變換消除噪聲,小波降噪的方法主要有模極大值去噪法、相關性去噪法和閾值去噪法。閾值去噪法是常用的一種小波降噪方法,其基本原理:小波的多分辨率時頻局部化分析特性可以在多個尺度下把信號中不同頻率的成分分解到不同的子空間中去,如果對分解得到的小波系數作用閥值,將低于閥值的噪聲成分所在頻道的小波變換系數置零,保留我們關心的頻帶的小波變換系數,然后重新合成信號,就可以得到消除噪聲的信號。
軟件部分采用Hilbert變換與相關算法實現幅度自動均衡,在水聲信號中對起伏大和強噪聲干擾信號進行抑制。基于HHT的分析主要由2個步驟組成:首先對時間序列進行經驗模式分解(Empirical Mode Decomposition,EMD)得到本征模態函數組,然后對每個本征模態函數進行希爾伯特變換,再組成時頻譜圖進行分析。其中最為關鍵的是經驗模式分解,該方法從本質上講是將信號進行平穩化的過程,其結果是將信號中不同尺度的波動或趨勢逐級分解開來,產生一系列具有不同特征尺度的數據序列,每1個序列即為1個本征模態函數分量。對這些本征模態函數進行希爾伯特變換便可得到信號的時頻譜圖,由此得到的譜圖能夠準確地反映出系統原有的特性。經驗模式分解的最大優點是使希爾伯特變換后的瞬時頻率具有物理意義,避免了傅立葉變換中需使用許多諧波分量表達非線性、非平穩信號的不足。
2.2 基于正交多載波擴頻的水聲通信技術研究[7-8]
首先通過串并轉換將串行的原始數據轉換成P路并行的數據流,對每一路數據流我們進行S次重復發送,同時對多路數據進行交織處理,后對多組數據進行短碼擴頻,最后進行正交載波調制,并行發送。由于每個子載波采用低速的碼序列,降低了ICI干擾,同時串并轉換后,數據符號周期延長,降低了(Inter-symbol-interference)ISI干擾。本系統可以提高擴頻處理增益,降低多途干擾影響,且可以同時取得時間域和頻率域的分集效果。
發射結構框圖和頻譜結構示意圖如圖6和圖7所示。
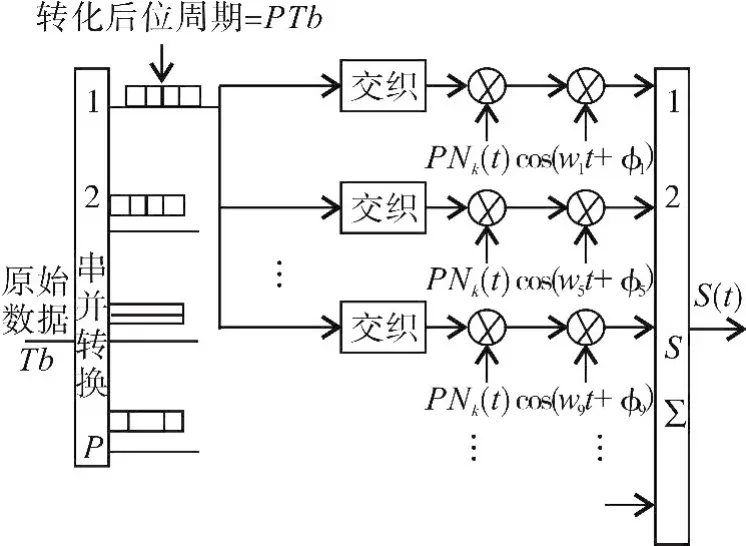
圖6 時頻域分集的正交多載信號發射結構框圖Fig.6 Orthogonalmulticast signal transMitting structural block diagram with time-frequency diversity
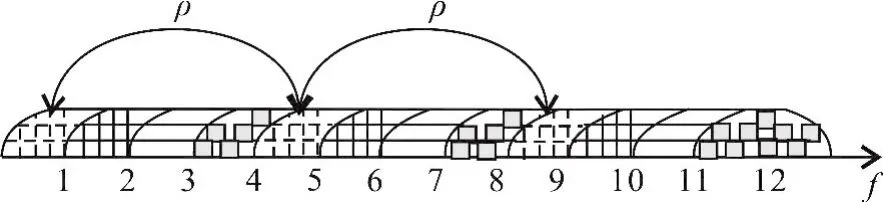
圖7 時頻域分集的正交多載信號頻譜結構示意圖Fig.7 Orthogonalmulticast signal spectrum structural block diagram With time-frequency diversity
3 湖上試驗結果分析
為驗證自主回收UUV水聲定位與遙測遙控導引系統關鍵組件的性能,開展了湖上靜態與動態跑船試驗。試驗過程:試驗船A(攜帶系統發射設備)在距工作母船B(攜帶系統接收設備)的半徑2 km范圍不同距離點進行靜態拉距試驗,在距母船半徑2 km范圍內以不同航行速度進行動態跑船試驗。攜帶系統發射設備的試驗船A可模擬發射UUV水聲定位與遙測信標及遙控信標;攜帶系統接收設備的工作母船B接收試驗船A發出的水聲信號,進行信號調理、數據記錄與處理等,從而分析試驗效果。
3.1 試驗水域水文條件
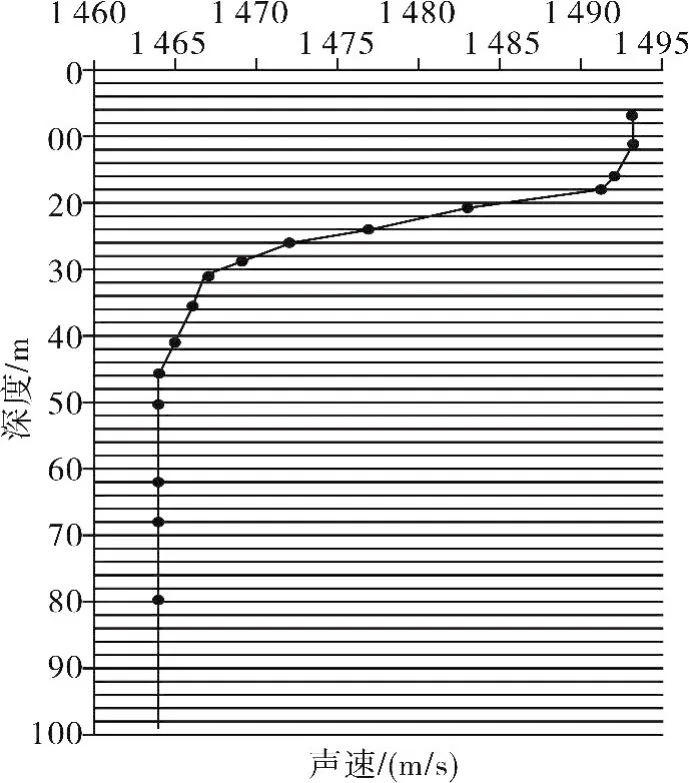
圖8 試驗水域聲速梯度實測結果Fig.8 Sound velocity gradient data on experiment lake
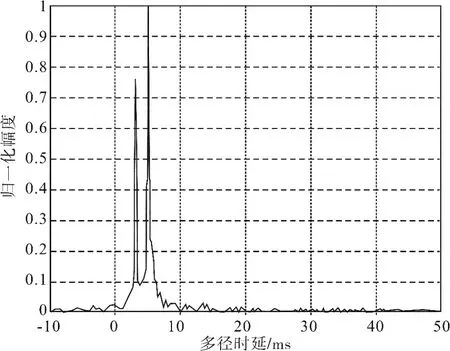
圖9 距離1 000 m時信道測量結果Fig.9 Underwater channel data at 1 000 m distance
圖8為試驗當天試驗水域聲速梯度實測結果。從圖中可以看出,該季節試驗水域聲速梯度呈明顯的負梯度現象,換能器吊放在不同水深處時的信道多徑情況以及接收信噪比均會有較大差別,試驗船A與工作母船B吊放的換能器應避免聲速梯度的影響。試驗船A與母船B的距離為1 000 m時,對信道情況進行了測試,從圖9可以看出大部分多途反射在5 ms左右。
3.2 試驗結果與分析
對靜態與動態跑船試驗數據進行分析,定位數據比對船載DGPS數據,通過多組數據比對,可得出水平定位精度優于0.5%。遙測遙控數據通過統計解調后得到的二進制數據流與模擬發射設備調制的二進制數據流的差異得到誤碼率,統計次數為靜態每個參數6 000次、動態跑船態每個參數9 000次。遙測遙控湖上試驗誤碼率結果如表1所示,從表1可以看出水聲遙測遙控系統解算誤碼率達到了10-3數量級,達到了項目的指標要求,可有效引導UUV回收作業。
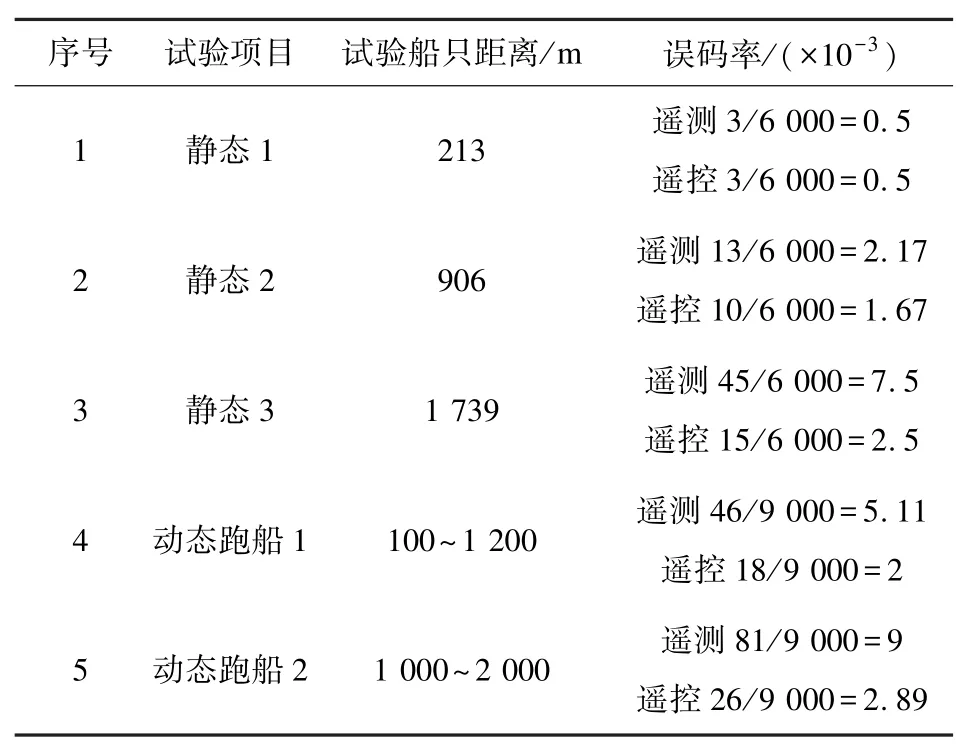
表1 遙測遙控湖上試驗誤碼率統計表Table 1 Experiment bit error rate statistics table on lake for telemetry and remote control system
4 結束語
本文突破了低信噪比弱信號檢測、基于正交多載波擴頻的水聲通信等關鍵技術的解決途徑,通過多種調制方式分析和比較,設計了一種正交混合擴頻調制方式,并采用相干二維搜索技術,提高擴頻技術多普勒補償能力。湖上靜態與動態跑船試驗結果表明:水聲水平定位精度優于0.5%,水聲遙測遙控系統解算誤碼率達到了10-3數量級,可有效引導UUV回收作業。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25