航行體近水面滑跳運動試驗研究
2019-06-28 07:55:52孫士明陳瑋琪王寶壽何振民季錦梁
數(shù)字海洋與水下攻防 2019年2期
關(guān)鍵詞:模型
孫士明,陳瑋琪,王寶壽,郁 偉,何振民,季錦梁
(中國船舶科學研究中心國防水動力學重點實驗室,江蘇無錫214082)
0 引言
水面滑跳是航行體近水面小角度撞水過程中所發(fā)生的一種特殊運動,人們常見的“打水漂”就是一種典型的滑跳現(xiàn)象。近年來不斷有學者提出利用這種滑跳運動來實現(xiàn)近水面高速機動飛行的新概念跨介質(zhì)飛行器[1-4],成為跨介質(zhì)航行體研究的熱點問題之一,其連續(xù)滑跳的關(guān)鍵在于如何保持撞水過程中的姿態(tài)穩(wěn)定。但是,跨介質(zhì)航行體近水面滑跳問題涉及到復雜的多相流動與航行體大幅運動的相互作用,尤其是航行體高速撞水過程中帶來的航行體受力的劇烈變化及自由液面的破碎與飛濺等問題,具有強烈的非線性。目前對于水面滑跳的研究多集中在物體運動過程的數(shù)值仿真[5-6],而實際情況中,滑跳運動是否可行則少有試驗研究涉及。本文通過開展近水面高速滑跳航行體試驗研究,探究航行體水面滑跳運動特性,為近水面跨介質(zhì)飛行器的研制提供技術(shù)基礎(chǔ)。
1 水面滑跳構(gòu)型設(shè)計
1.1 滑跳模型外形與尺度
自身平衡而穩(wěn)定的氣動布局可有2種選擇:一種是正常的飛機形式,一種是鴨式布局形式[7]。一般高速滑行艇采用的都是鴨式布局形式,為了能夠以較小的速度快速完成水面滑躍,本文試驗?zāi)P筒捎螟喪讲季帧?/p>
航行體總體布局如圖1所示,在彈體主體的中后部加裝楔形體滑行面,以實現(xiàn)航行體觸水滑跳過程減阻和降載,滑行面斜升角25°,并與航行體主體部分結(jié)合在一起,保證光滑過渡。航行體前部裝有小型翼,用于貼近水面時提供部分升力及保持模型平衡。模型總長為960 mm,滑行面寬度400 mm,模型設(shè)計為正浮力,總體重量9.6 kg,靜浮于水面時的狀態(tài)如圖2所示。
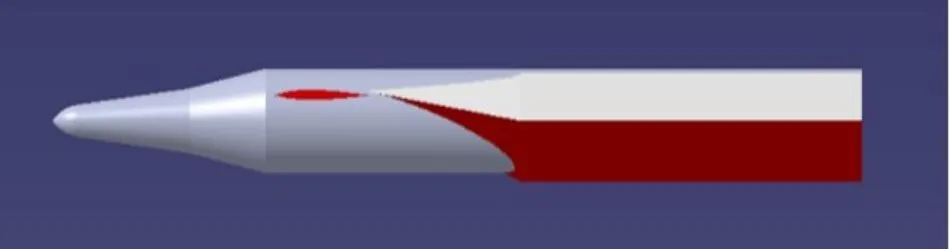
圖1 滑跳模型示意圖Fig.1 Schematic of skipping model

圖2 滑跳模型靜浮于水面時狀態(tài)Fig.2 Floating state of skipping model
1.2 模型重心參數(shù)影響計算與分析
針對該模型,本文進行了初步數(shù)值仿真。因為數(shù)值計算不是本文研究的重點,故對計算方法僅作簡單介紹。本文計算采用基于求解RANS方程的CFD方法[8],湍流模型選取標準模型,采用VOF多相流模型進行自由界面捕捉,使用六自由度求解器結(jié)合重疊網(wǎng)格方法實現(xiàn)模型的大自由度運動。采用有限體積法對控制方程進行離散,壓力場求解采用SIMPLE算法。計算域總網(wǎng)格數(shù)約240萬。
計算工況為模型以30 m/s速度從距水面0.1 m高度位置釋放,模型受到150 N恒定推力,作用位置在航行體尾部截面中心位置。計算中變化的參數(shù)為模型重心的縱向和垂向位置。圖3顯示了不同推力矩條件下模型滑跳過程傾角變化規(guī)律,推力矩主要反映了模型垂向重心位置的影響規(guī)律,可看出推力矩對模型運動的影響顯著,甚至完全改變模型撞水后的姿態(tài)變化方向。通過綜合比較,本文選取模型撞水后可以保持姿態(tài)相對穩(wěn)定的參數(shù),即推力矩為1 N力矩時的重心垂向位置參數(shù)。
圖4顯示了模型不同重心縱向位置對滑跳過程的影響。重心位置一般應(yīng)靠后布置,本文計算了模型重心在中后部距柱段前緣288 mm、338 mm和388 mm三個位置參數(shù)。通過計算發(fā)現(xiàn),模型實現(xiàn)穩(wěn)定滑跳過程存在一個最佳重心范圍,最終本文選定重心縱向位置距柱段前緣338 mm位置參數(shù)。
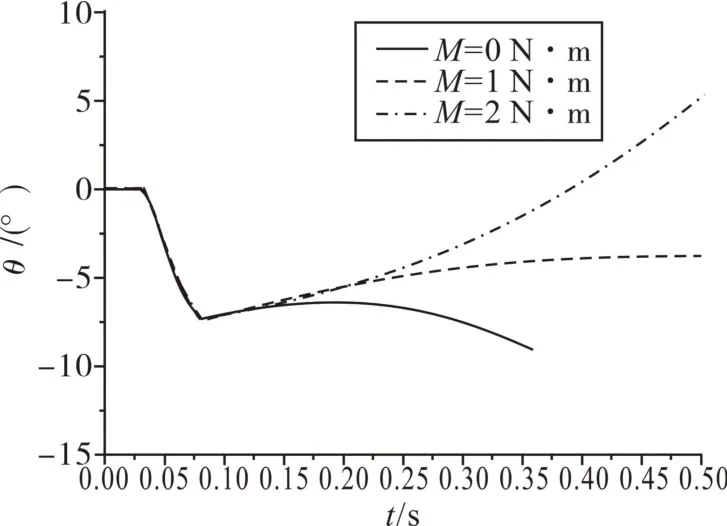
圖3 不同推力矩條件下模型滑跳過程傾角變化Fig.3 Variations of trim angle under different thrust moments
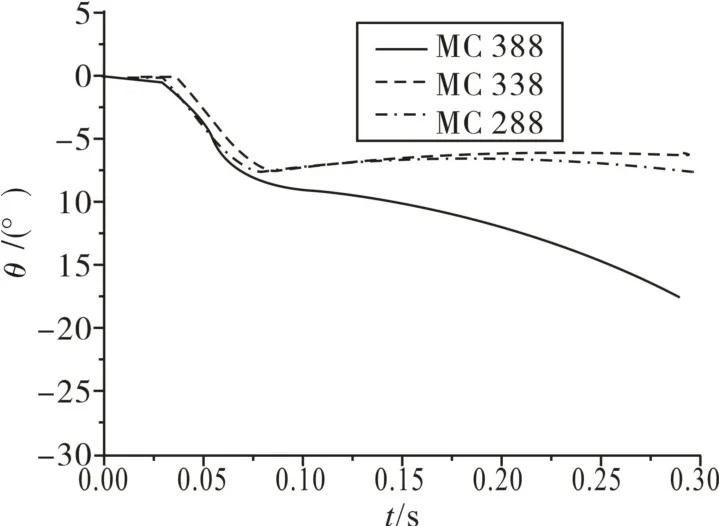
圖4 不同重心縱向位置模型滑跳過程傾角變化Fig.4 Variations of trim angle under different longitudinal positions ofmass center
從以上計算結(jié)果中可以看出,滑跳模型對于重心位置的布置非常敏感,因此在模型設(shè)計時應(yīng)加以重點考慮。圖5顯示了通過計算分析選取合適參數(shù)后的模型觸水滑跳過程,可以看出,滑跳過程模型傾角變化很小,不會對下一次滑跳過程的初始姿態(tài)參數(shù)產(chǎn)生很大變化,即可以保持相對穩(wěn)定的滑跳過程。

圖5 模型水面滑跳過程仿真結(jié)果Fig.5 Simulation results of skipping process ofmodel
2 水面滑跳試驗
2.1 滑跳運動方式可行性驗證
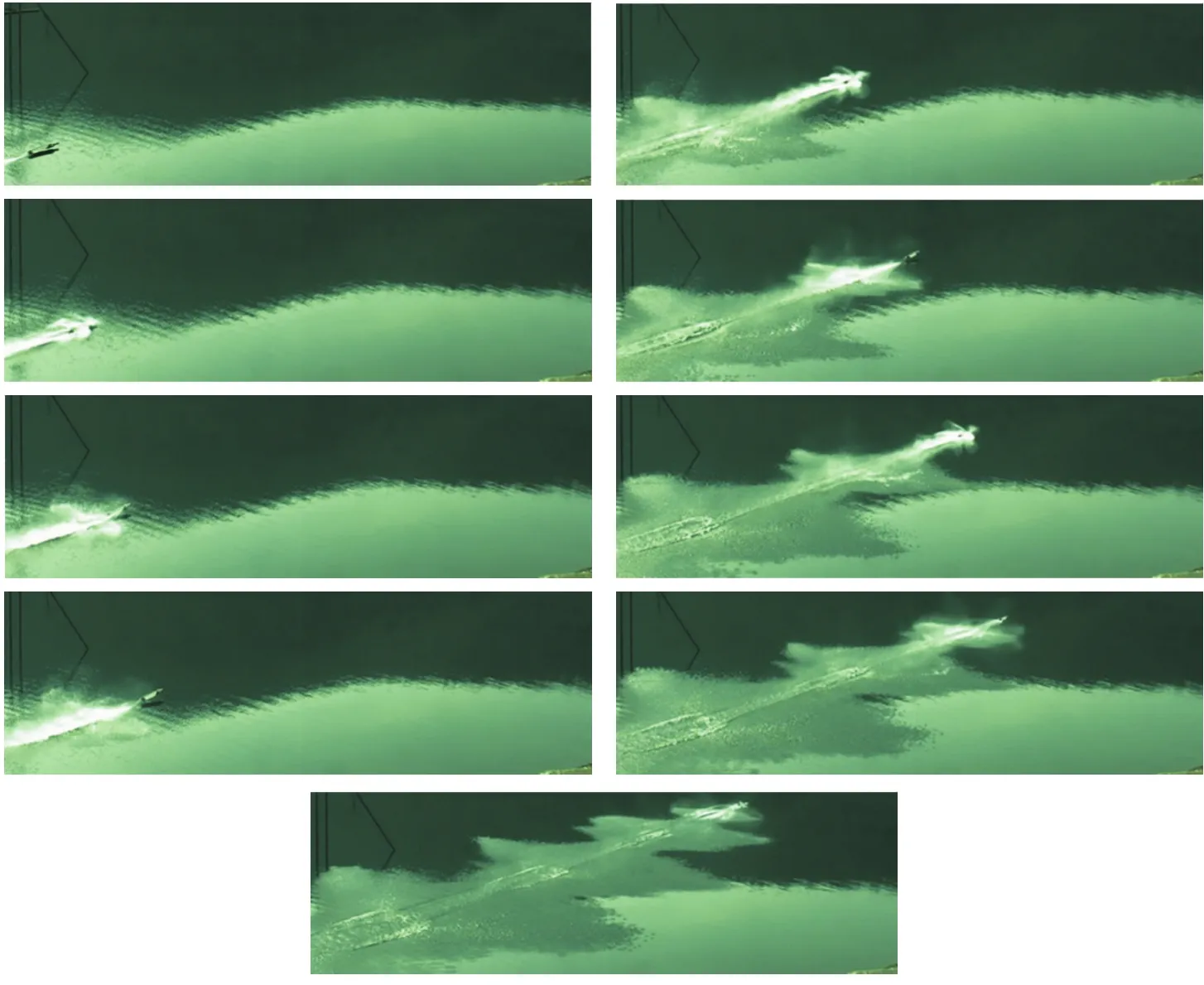
圖6 航行體模型水面滑跳過程Fig.6 Skipping process of vehiclemodel on water surface
基于本文設(shè)計的滑跳構(gòu)型,開展了開放水面自由滑跳試驗,模型整個運動過程如圖6所示。通過試驗錄像可以看出:模型可以保持連續(xù)滑跳的穩(wěn)定性,穩(wěn)定滑跳次數(shù)達到4次以上;模型整個運動過程基本保持直線運動,沒有發(fā)生明顯的側(cè)傾;運動速度達到預期目標,通過圖像判讀,模型速度在第二次與第三次撞水之間達到最大值,最大速度約為29.0 m/s,彈跳高度也在此段時間內(nèi)最大,距水面約0.3 m;滑跳過程中,模型撞水產(chǎn)生的飛濺比較明顯,模型失去動力后,速度降低,在第四次滑跳后降至可滑跳最小速度之下,未能繼續(xù)滑跳。該試驗基本驗證了本文設(shè)計的模型可以實現(xiàn)連續(xù)穩(wěn)定的滑跳運動。
2.2 滑跳運動穩(wěn)定性及液面飛濺分析

圖7 航行體滑跳傾覆過程Fig.7 Capsizing process of skipping
在滑跳模型設(shè)計過程中,通過計算發(fā)現(xiàn)模型重心會對滑跳過程產(chǎn)生明顯影響,試驗中亦同樣發(fā)現(xiàn)這一現(xiàn)象,當模型重心有所改變時,會影響滑跳過程模型觸水時刻的傾角,當傾角過大時,會引起滑跳的不穩(wěn)定性。如圖7所示,模型以較大傾角撞水時(圖中傾角為26°),尾部會先觸水產(chǎn)生很大的力矩,使模型姿態(tài)迅速變化,轉(zhuǎn)變?yōu)榈皖^再次撞水,這樣的2次連續(xù)擊水過程使模型失去滑跳穩(wěn)定性,甚至產(chǎn)生傾覆。本文由于試驗次數(shù)較少,不能定量提出傾角穩(wěn)定范圍,但從少數(shù)發(fā)生傾覆的試驗工況來看,初步認為撞水傾角超過25°會產(chǎn)生傾覆。因此,滑跳模型的設(shè)計應(yīng)仔細考慮模型重心位置,確保撞水過程不至產(chǎn)生很大的傾角。

圖8 未改進前航行體滑跳過程產(chǎn)生的液面飛濺Fig.8 Water splash of unmodified model in skipping process
橫向穩(wěn)定性同樣是滑跳穩(wěn)定的一個重要問題,本文試驗?zāi)P褪軜?gòu)型限制,橫滾方向轉(zhuǎn)動慣量較小。試驗中也發(fā)現(xiàn)外界擾動較小時,模型可以穩(wěn)定向前滑跳,而當運動過程受到明顯側(cè)風影響時,模型易受橫向擾動影響而產(chǎn)生側(cè)傾,進而影響滑跳穩(wěn)定。后期可通過加裝機翼來增加橫向穩(wěn)定性。

圖9 采用一體化構(gòu)型后航行體滑跳過程產(chǎn)生的液面飛濺Fig.9 Water splash of modified model in skipping process
下面對滑跳過程中的液面飛濺情況進行初步分析。圖8和圖9顯示了2個工況下模型一次滑跳過程中撞水及液面飛濺過程,2個工況使用的模型有所不同。圖8中模型楔形體滑行面與彈體之間通過一平面直接連接,而圖9中模型則將畫面與彈體之間通過光滑過渡面連接,使模型實現(xiàn)一體化構(gòu)型。從圖8中可以看出,由于尾噴流的作用,模型撞水產(chǎn)生的飛濺流場較為復雜,由于模型主體與滑行板連接過渡段不是光滑過渡,導致撞水過程中該處產(chǎn)生強烈的飛濺,并將其與模型主體產(chǎn)生的飛濺分割開來(如圖8中紅色圓圈位置所示)。因此,在后續(xù)滑跳模型的設(shè)計上,應(yīng)盡可能減少部件之間不光滑的連接過渡,以減小產(chǎn)生的飛濺尺度。從圖9(為了更清晰地看到整個液面的變化過程,高速錄像從模型運動路線的側(cè)后方拍攝)中可以看出,模型采用一體化構(gòu)型后,飛濺沒有了圖8中那樣被“割開”的現(xiàn)象。由于滑行面形狀為楔形體,尾部滑板撞水過程產(chǎn)生的飛濺主要向兩側(cè)發(fā)展,尾噴流會對滑跳產(chǎn)生的飛濺產(chǎn)生比較明顯的影響,形成復雜的多相流動。
3 結(jié)束語
本文針對航行體滑跳運動開展研究,設(shè)計了一種適宜滑跳的航行體構(gòu)型,對航行體的布局進行了初步探討,并開展水面自由滑跳試驗。試驗表明:①本文設(shè)計的滑跳模型能夠?qū)崿F(xiàn)水面連續(xù)穩(wěn)定滑跳,最高速度達到約29 m/s,最大彈跳高度約0.3m,證明了滑跳運動方式具有一定的可行性;②滑跳模型對重心位置變化非常敏感,滑跳運動過程中應(yīng)盡可能保持小傾角條件,并且模型整體應(yīng)該保持光滑過渡。本文的研究僅是對滑跳運動現(xiàn)象的初步探索,后續(xù)可在以下2個方面繼續(xù)深入開展相關(guān)研究工作:
1)滑跳模型的進一步改進。本次試驗受試驗條件限制,對設(shè)計的構(gòu)型進行了一定程度的簡化,試驗速度也并不很高,未來可繼續(xù)對構(gòu)型開展優(yōu)化,以降低滑跳過程液面飛濺帶來的能量損失,并不斷提高試驗速度以進一步驗證滑跳運動在更高速度條件下的可行性。
2)增加模型的主動控制手段。目前試驗條件下均采用無控模型,若能通過一些簡單有效的控制手段來調(diào)整模型撞水過程中的姿態(tài)變化,將更有利于模型多次滑跳過程的穩(wěn)定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19