降低受信儀行程開關(guān)返程誤差方法的分析
2019-06-28 07:55:48吳建萍
數(shù)字海洋與水下攻防 2019年2期
劉 威,吳建萍
(中國(guó)船舶重工集團(tuán)有限公司第七一〇研究所,湖北宜昌443003)
0 引言
火箭發(fā)射裝置是彈藥發(fā)射平臺(tái),屬于海軍重要裝艦設(shè)備。由于該裝備具有旋回、俯仰等功能,并配有控制設(shè)備,隨時(shí)根據(jù)戰(zhàn)術(shù)要求調(diào)轉(zhuǎn)發(fā)射裝置。受信儀作為發(fā)射裝置的傳感設(shè)備,具有反饋裝置運(yùn)行位置和控制裝置運(yùn)行、射界范圍的功能[1-2]。為了控制發(fā)射裝置在一定范圍內(nèi)工作,受信儀設(shè)計(jì)采用了凸輪條和微動(dòng)開關(guān)滾輪的相對(duì)運(yùn)動(dòng)來(lái)控制微動(dòng)開關(guān)通斷,實(shí)現(xiàn)對(duì)裝置運(yùn)行、射界的控制。在實(shí)際工作中,受信儀的行程開關(guān)返程誤差較大,一般在1.0°~1.5°之間波動(dòng),影響了運(yùn)行、射界范圍的控制精度。
本文主要圍繞如何降低凸輪行程開關(guān)返程誤差展開研究,針對(duì)影響行程因素多,各因素存在交叉影響的實(shí)際問(wèn)題。主要采用PDCA程序,應(yīng)用了因果圖分析方法,將凸輪行程開關(guān)的返程誤差減小到0.5°以下,提高發(fā)射裝置運(yùn)行、射界范圍的定位精度,達(dá)到了預(yù)期的目標(biāo)。
1 工作原理
1.1 工作過(guò)程數(shù)學(xué)模型
根據(jù)受信儀結(jié)構(gòu)特點(diǎn),建立工作過(guò)程的數(shù)學(xué)模型。將凸輪往返的2個(gè)過(guò)程分解開,2個(gè)過(guò)程凸輪運(yùn)行角度差為凸輪的返程誤差。
1)當(dāng)微動(dòng)開關(guān)由松弛到壓緊的過(guò)程。
此過(guò)程主要是凸輪盤帶動(dòng)凸輪條繞凸輪盤定軸作圓周運(yùn)動(dòng),微動(dòng)開關(guān)位置相對(duì)于凸輪盤定軸位置固定,微動(dòng)開關(guān)處于松弛狀態(tài);凸輪條圓周運(yùn)動(dòng)過(guò)程中,凸輪條一邊接觸微動(dòng)開關(guān)滾輪,滾輪向上抬起,微動(dòng)開關(guān)被壓縮實(shí)現(xiàn)接通或切斷控制電路,從而控制運(yùn)行、射界范圍。工作原理圖見圖1。
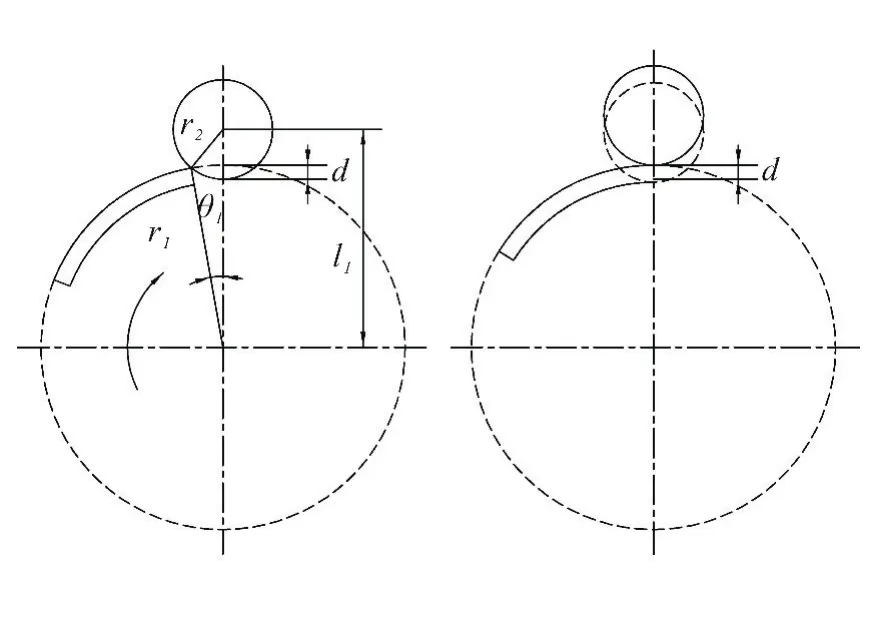
圖1 凸輪行程開關(guān)工作原理圖(一)Fig.1 Working principle diagram of cam liMit sWitch(1)
圖1中:r1表示凸輪條的外徑;r2表示微動(dòng)開關(guān)滾輪的外徑;d表示微動(dòng)開關(guān)的壓縮量;θ1為當(dāng)微動(dòng)開關(guān)由松弛到壓緊過(guò)程中凸輪的轉(zhuǎn)動(dòng)角度;l1表示微動(dòng)開關(guān)在松弛狀態(tài)時(shí)凸輪圓心與滾輪圓心的距離,此時(shí)由松弛要進(jìn)入壓縮狀態(tài):

由三角形余弦定理,可得

2)當(dāng)微動(dòng)開關(guān)由壓緊到松弛的過(guò)程。
此過(guò)程主要是凸輪盤帶動(dòng)凸輪條繞凸輪盤定軸作圓周運(yùn)動(dòng),微動(dòng)開關(guān)位置相對(duì)于凸輪定軸位置固定,微動(dòng)開關(guān)處于被壓縮狀態(tài);凸輪條圓周運(yùn)動(dòng)過(guò)程中,凸輪條一邊離開微動(dòng)開關(guān)滾輪,滾輪向下運(yùn)動(dòng),微動(dòng)開關(guān)被釋放實(shí)現(xiàn)接通或切斷控制電路,從而控制運(yùn)行、射界范圍。工作原理圖見圖2。

圖2 凸輪行程開關(guān)工作原理圖(二)Fig.2 Working principle diagram of cam liMit sWitch(2)
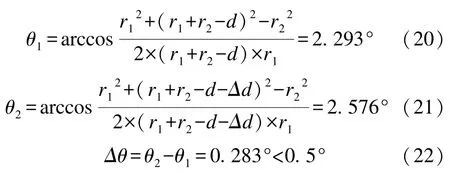
圖2中:Δd表示微動(dòng)開關(guān)的差動(dòng)量;l2表示微動(dòng)開關(guān)在松弛狀態(tài)時(shí)凸輪圓心與滾輪圓心的距離,此時(shí)從壓縮回到松弛狀態(tài):

由三角形余弦定理,可得

式中Δθ表示凸輪往返過(guò)程的回程差,可得:
1.2 仿真計(jì)算
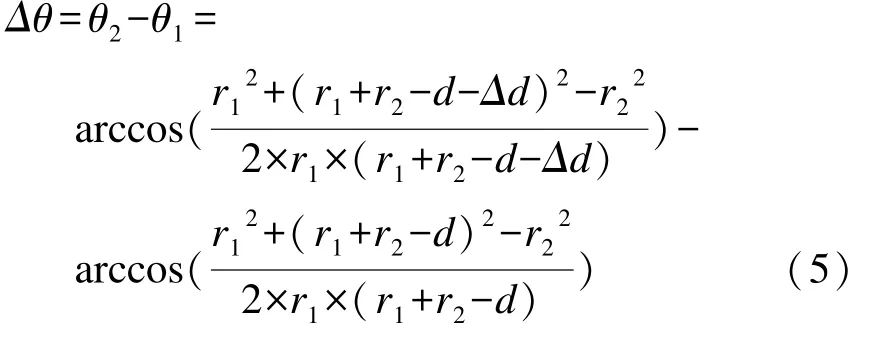
依據(jù)公式(5),往返過(guò)程的回程差Δθ影響因素主要包括凸輪條的外徑r1、微動(dòng)開關(guān)滾輪的外徑r2、微動(dòng)開關(guān)的壓縮量d、微動(dòng)開關(guān)的差動(dòng)量 Δd等。在MATLAB仿真軟件平臺(tái)中,計(jì)算出回程差Δθ與各參數(shù)之間關(guān)系。
r1與Δθ的關(guān)系曲線見圖3,其中;r2=4 mm,Δd=0.5 mm,d=2 mm;r2與 Δθ的關(guān)系曲線見圖4,其中 r1=62mm,Δd=0.5mm,d=2mm;d與Δθ的關(guān)系曲線見圖5,其中 r1=62 mm,r2=4 mm,Δd=0.5 mm;Δd與 Δθ的關(guān)系曲線見圖6,其中r1=62 mm,r2=4 mm,d=2 mm。
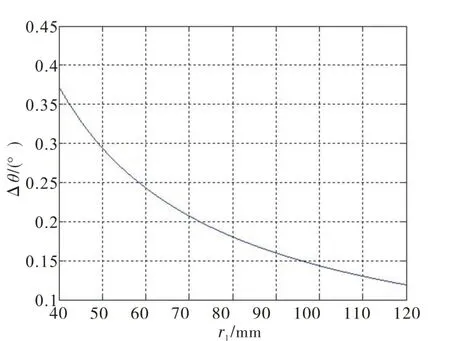
圖3 變化曲線圖(一)Fig.3 Change curve diagram(1)

圖4 變化曲線圖(二)Fig.4 Change curve diagram(2)
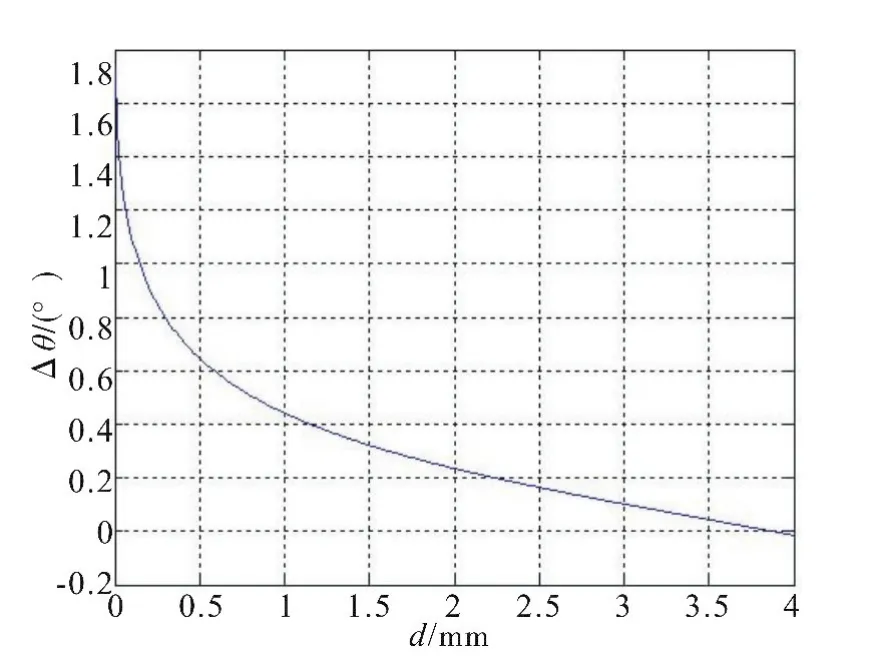
圖5 變化曲線圖(三)Fig.5 Change curve diagram(3)
由圖3-6可得:
1)r1變大時(shí),Δθ變小,即在其它條件不變的情況下,凸輪的外徑變大,凸輪條往返過(guò)程的回程差變小。
2)r2在(0 mm,2mm)區(qū)間上時(shí),r2≤d=2 mm,凸輪條上邊緣線直接壓在微動(dòng)開關(guān)滾輪軸線上,無(wú)法實(shí)現(xiàn)壓縮微動(dòng)開關(guān)滾輪,Δθ仿真計(jì)算數(shù)值無(wú)實(shí)際意義。依據(jù)經(jīng)驗(yàn),一般要求r2≥2d,保證凸輪條壓縮微動(dòng)開關(guān)滾輪的過(guò)程順利完成。當(dāng)d=2 mm,確立有效工作區(qū)間為(4 mm,6 mm),在此區(qū)間內(nèi),微動(dòng)開關(guān)滾輪變大時(shí),凸輪往返過(guò)程的回程差變大。
3)d變大時(shí),Δθ變小,即在其它條件不變的情況下,微動(dòng)開關(guān)的壓縮量變大,凸輪條往返過(guò)程的回程差變小。

圖6 變化曲線圖(四)Fig.6 Change curve diagram(4)
4)Δd變小時(shí),Δθ變小,即在其它條件不變的情況下,微動(dòng)開關(guān)的差動(dòng)量變小,凸輪條往返過(guò)程的回程差變小。
由以上 4條結(jié)論,可知通過(guò)調(diào)節(jié)r1、r2、d、Δd等參數(shù)可以降低Δθ,使其滿足目標(biāo)要求。
1.3 優(yōu)化求解
復(fù)合形法是求解約束優(yōu)化問(wèn)題的一種重要的直接解法。它的基本思路是在可行域內(nèi)構(gòu)造一個(gè)具有個(gè)頂點(diǎn)的初始復(fù)合形。對(duì)該復(fù)合形各頂點(diǎn)的目標(biāo)函數(shù)值進(jìn)行比較找到目標(biāo)函數(shù)最大的頂點(diǎn)(稱最壞點(diǎn)),然后按一定的法則求出目標(biāo)函數(shù)有所下降的可行的新點(diǎn),并用此點(diǎn)代替最壞點(diǎn),構(gòu)成新的復(fù)合,復(fù)合形的形狀每改變一次,就向最優(yōu)點(diǎn)移動(dòng)一步,直至逼近最優(yōu)點(diǎn)[3-5]。
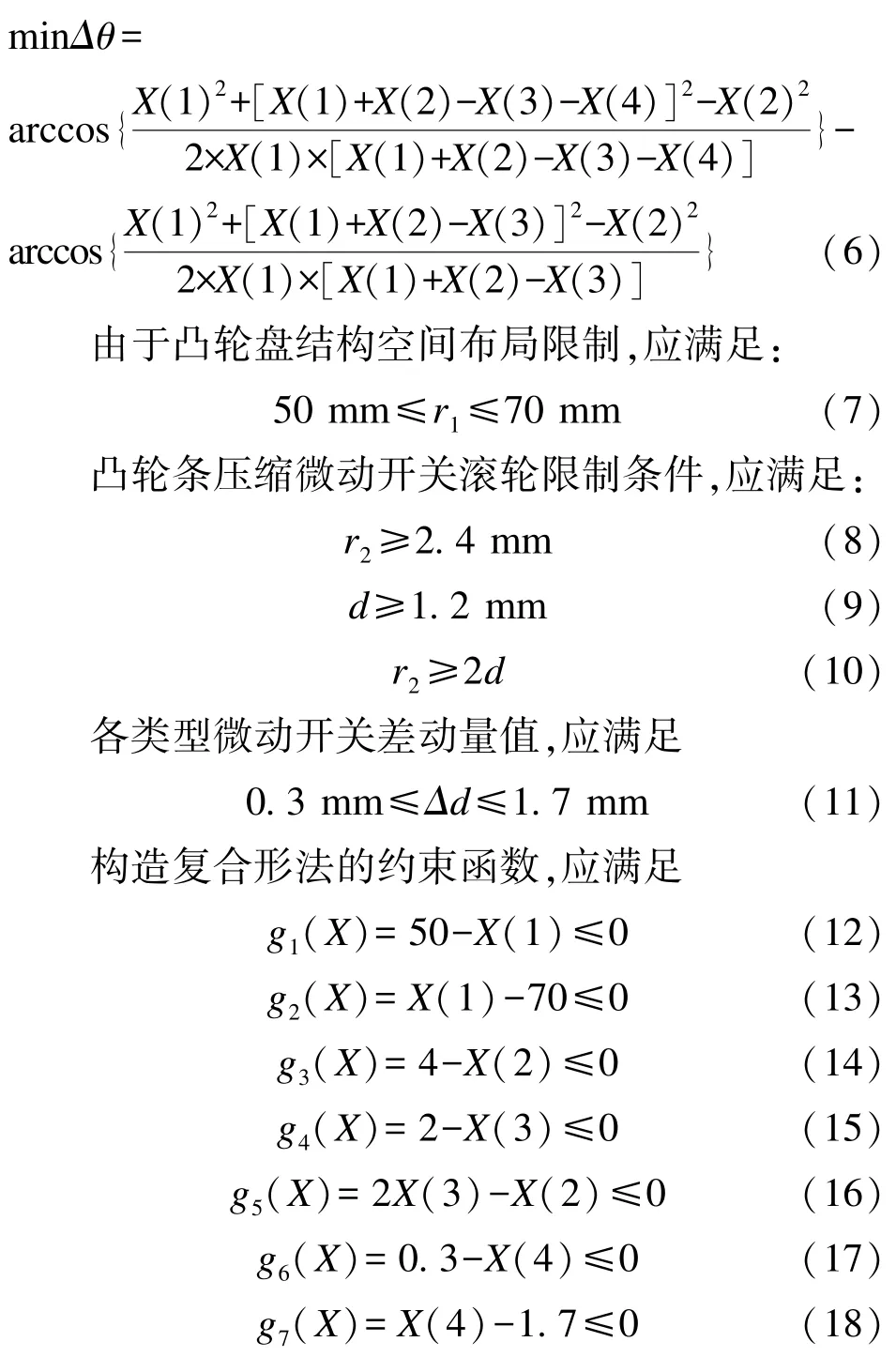
受信儀行程開關(guān)返程誤差優(yōu)化目標(biāo)是誤差值最小,同時(shí)保證r1、r2、d、Δd等參數(shù)滿足物理尺寸要求。 令r1=X(1)、r2=X(2)、d=X(3)、Δd=X(4),由公式(5)構(gòu)造復(fù)合形法的目標(biāo)函數(shù)為
獲得上述目標(biāo)函數(shù)和約束函數(shù)后,可按下述步驟開展復(fù)合形法迭代直接求解[6-7]。
1)根據(jù)作圖法給定搜索區(qū)間a和b,隨機(jī)產(chǎn)生K個(gè)隨機(jī)點(diǎn),然后將非可行點(diǎn)調(diào)入可行域內(nèi),構(gòu)成初始復(fù)合形;
2)計(jì)算各頂點(diǎn)的函數(shù)值,選出好點(diǎn)X(L)與壞點(diǎn)X(H);
3)計(jì)算除壞點(diǎn)外其余各頂點(diǎn)的中心點(diǎn)X0;
4)計(jì)算映射點(diǎn)X(R);
5)構(gòu)成新的復(fù)合形;
6)判斷終止條件,各頂點(diǎn)與好點(diǎn)的函數(shù)值之差的均方根值小于誤差值ε:

如不滿足迭代條件,則返回步驟2)繼續(xù)下一次迭代;否則,可將最后復(fù)合形的好點(diǎn)X(L)及其相應(yīng)的函數(shù)值T啟動(dòng)(X(L))作為最優(yōu)解輸出,并結(jié)束運(yùn)算。
在MATLAB環(huán)境下,編寫3個(gè)M函數(shù),分別為主函數(shù)、目標(biāo)函數(shù)和約束函數(shù)。經(jīng)過(guò)MATLAB程序運(yùn)行后,得到目標(biāo)函數(shù)值的收斂曲線如圖7。
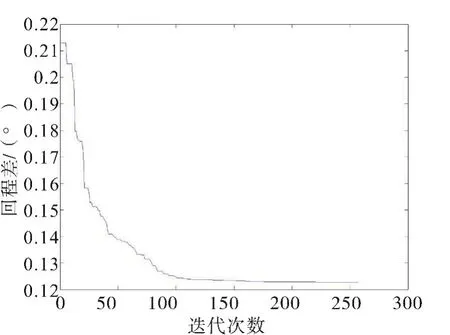
圖7 目標(biāo)函數(shù)值的收斂曲線圖Fig.7 Convergence curve diagram of objective function value
圖7可以看出,隨著迭代次數(shù)增加,誤差值逐漸減少,接近于最優(yōu)解,直到誤差小于規(guī)定值時(shí),程序結(jié)束。 迭代 180次后,X(1)、X(2)、X(3)、X(4)、Δθ(X)變化極小,確定獲得本次計(jì)算的最優(yōu)解:

獲得r1=70 mm,r2=2.4 mm,d=1.2 mm,Δd=0.3 mm受信儀的行程開關(guān)返程誤差最小。
2 影響因素分析
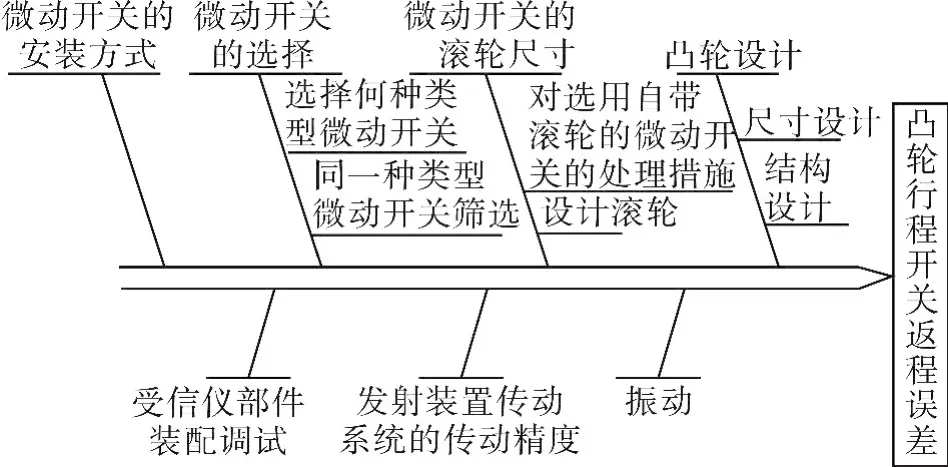
圖8 返程誤差影響因素因果圖Fig.8 Causality diagram of effect factors of return errors
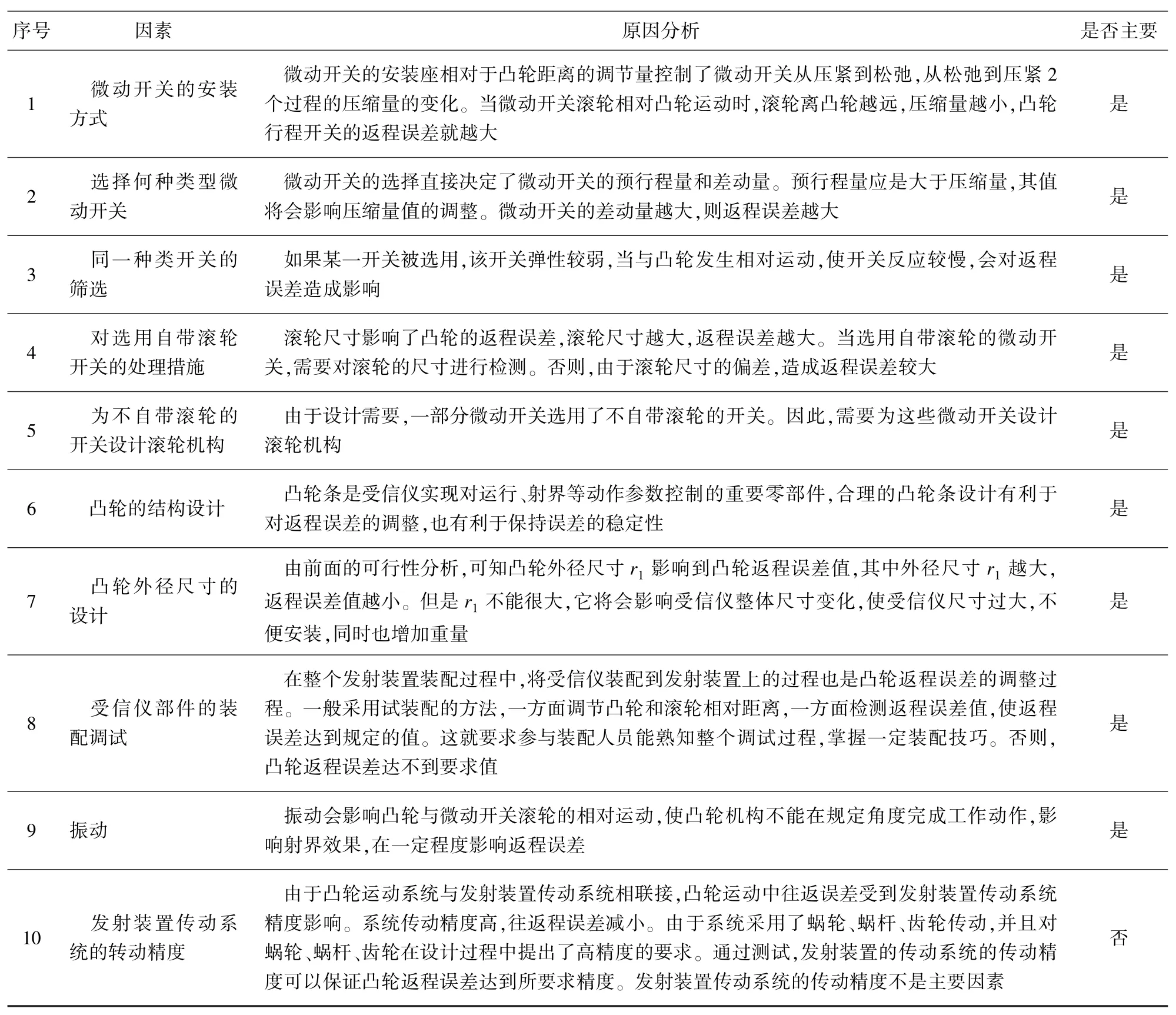
表1 影響因素分析說(shuō)明表Table 1 Analysis specification of influencing factors
經(jīng)上述分析,將凸輪行程開關(guān)的返程誤差減小到 0.5°以下,不僅要求合理確定d、Δd、r2、r1等參數(shù)值,還要開展結(jié)構(gòu)和機(jī)構(gòu)合理設(shè)計(jì),嚴(yán)控裝配環(huán)節(jié),從而消除各因素存在的交叉影響的實(shí)際問(wèn)題。依據(jù)PDCA管理程序,采用了因果圖分析方法,對(duì)影響凸輪行程開關(guān)返程誤差因素進(jìn)行綜合分析,共找出10項(xiàng)因素[8-9]。各因素分析經(jīng)歸納整理如圖8所示。10項(xiàng)因素中,9項(xiàng)可列為引起誤差的主要因素,1項(xiàng)作為非主要因素。見表1。
2.1 解決措施
措施一:改進(jìn)微動(dòng)開關(guān)的安裝座結(jié)構(gòu)設(shè)計(jì)。
將安裝座螺釘孔由圓孔改為一字孔,一字孔的長(zhǎng)方向應(yīng)保證調(diào)整微動(dòng)開關(guān)的滾輪與凸輪之間的相對(duì)距離,如圖9-10。
措施二:選擇適當(dāng)類型的微動(dòng)開關(guān)。
微動(dòng)開關(guān)存在多種型號(hào),微動(dòng)開關(guān)種類及參數(shù)見表2。選取按鈕和短轉(zhuǎn)子2種型式,表2數(shù)據(jù)表明按鈕和短轉(zhuǎn)子2種型式預(yù)行程和差動(dòng)量相對(duì)較小。
措施三:篩選開關(guān)。
對(duì)同一類型同批次開關(guān)篩選,因?yàn)槠渲锌赡苡幸徊糠珠_關(guān)彈性不足,可能會(huì)出現(xiàn)差動(dòng)較大,應(yīng)對(duì)開關(guān)進(jìn)行選擇。選出彈性有力開關(guān),并由專人負(fù)責(zé)篩選,保證所用的每一個(gè)開關(guān)能夠達(dá)到所需參數(shù)要求。
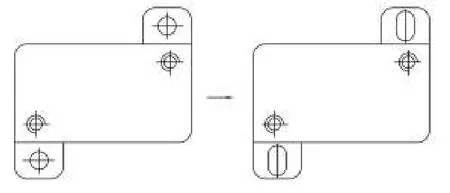
圖9 安裝座結(jié)構(gòu)改進(jìn)示意圖Fig.9 Schematic diagram of improved install seat structure

圖10 固定座工作示意圖Fig.10 Working schematic diagram of fixed seat
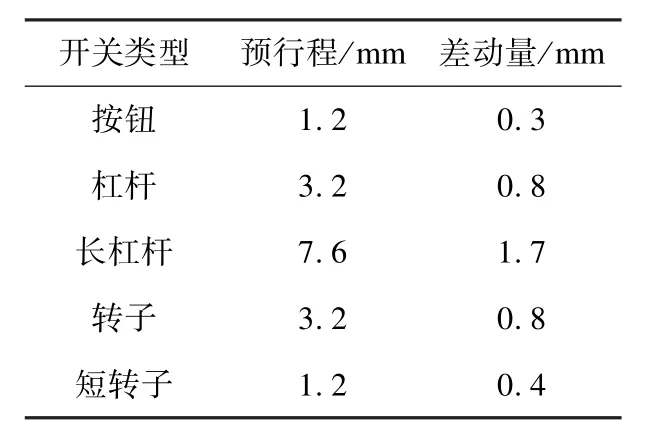
表2 微動(dòng)開關(guān)參數(shù)表Table 2 Parameter table ofMicro switch

表3 滾輪尺寸檢測(cè)數(shù)據(jù)表Table 3 Test data table of roller’s size
措施四:對(duì)選用自帶滾輪的微動(dòng)開關(guān)的處理措施。
當(dāng)微動(dòng)開關(guān)選擇自帶滾輪的微動(dòng)開關(guān),要對(duì)滾輪的外徑尺寸進(jìn)行測(cè)量,使被測(cè)滾輪外徑尺寸小于8 mm。測(cè)量結(jié)果見表3。
表3中可得,所選的8個(gè)滾輪外徑在4.8~5.2 mm之間,均小于8 mm,滿足要求。
措施五:滾輪機(jī)構(gòu)設(shè)計(jì)。
當(dāng)選擇不自帶滾輪的微動(dòng)開關(guān),應(yīng)對(duì)微動(dòng)開關(guān)設(shè)計(jì)一套滾輪機(jī)構(gòu),如圖11。
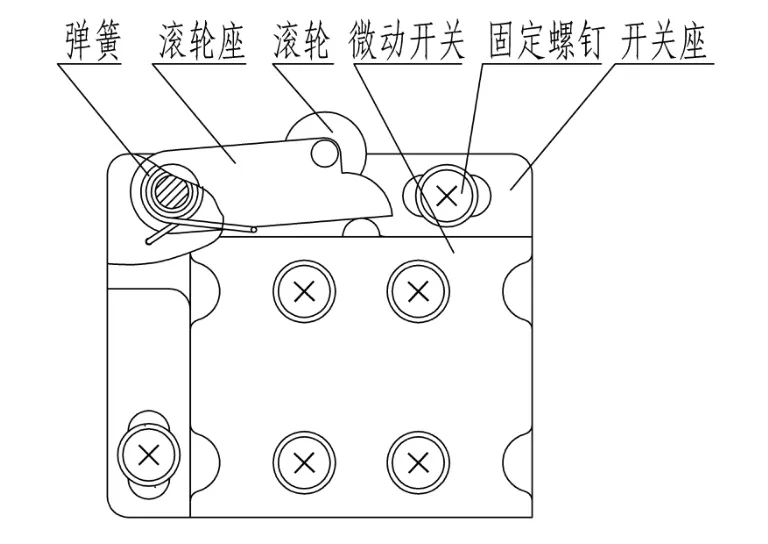
圖11 滾輪機(jī)構(gòu)示意圖Fig.11 Schematic diagram of roller mechanism
其中,滾輪半徑尺寸要小于或等于4 mm,使此機(jī)構(gòu)滿足設(shè)計(jì)要求。
措施六:凸輪結(jié)構(gòu)設(shè)計(jì)。
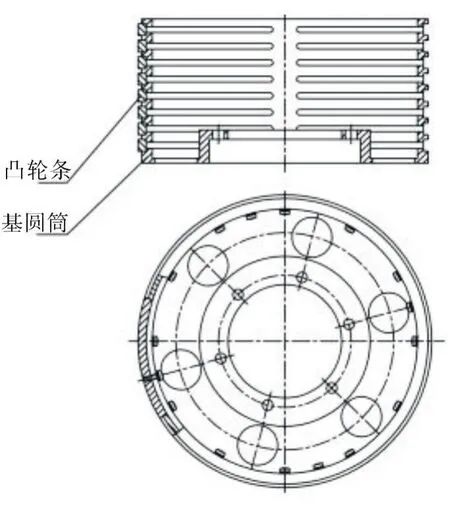
圖12 凸輪機(jī)構(gòu)示意圖Fig.12 Schematic diagram of cam mechanism
凸輪采用凸輪片與基圓筒相結(jié)合方式,如圖12。將凸輪片固定在基圓筒上,可以保證牢固可靠,防止凸輪條滑動(dòng)。采用該結(jié)構(gòu)一方面有利于調(diào)整,另一方面結(jié)構(gòu)簡(jiǎn)單,安裝方便。
措施七:凸輪條尺寸的設(shè)計(jì)。
某型發(fā)射裝置凸輪條外徑尺寸取62 mm,依據(jù)優(yōu)化設(shè)計(jì)結(jié)果,取外徑尺寸為 70 mm,則r1=70 mm;根據(jù)微動(dòng)開關(guān)的選擇,可得d=1.2 mm;Δd=0.4mm;滾輪外徑取上限植為r2=4mm,可得:
受信儀尺寸滿足要求,最終設(shè)計(jì)尺寸為r1=70 mm。
措施八:受信儀部件裝配調(diào)試。
在受信儀部件裝配時(shí)要求保證受信儀轉(zhuǎn)動(dòng)靈活,在與發(fā)射裝置裝配過(guò)程中,采用了試裝配法:不斷調(diào)整微動(dòng)開關(guān)的滾輪與凸輪片之間的距離,同時(shí)檢測(cè)返程誤差角度值。如表4。
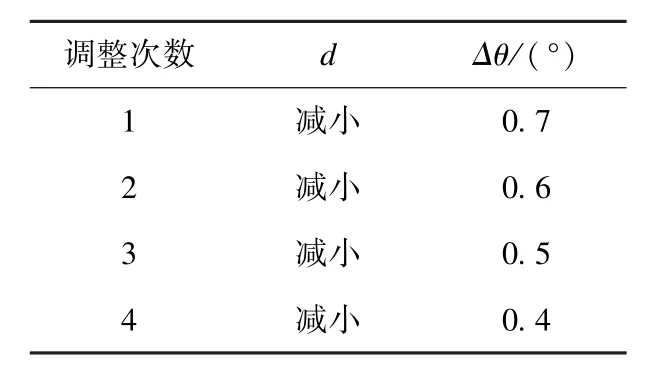
表4 安裝過(guò)程調(diào)整表Table 4 Installation process adjustment table
措施九:防振。
采取防振動(dòng)措施,主要從2個(gè)方面入手:一方面檢查所設(shè)計(jì)的結(jié)構(gòu)是否有防振動(dòng)措施。由于發(fā)射裝置具備運(yùn)轉(zhuǎn)過(guò)程中防振動(dòng)措施:如緩沖器等,使本裝置具備防振動(dòng)措施;另一方面在發(fā)射裝置運(yùn)輸過(guò)程中應(yīng)有防振動(dòng)措施。同時(shí)在裝配調(diào)試階段對(duì)微動(dòng)開關(guān)的安裝,微動(dòng)開關(guān)安裝座的固定,凸輪機(jī)構(gòu)的裝配進(jìn)行檢查,對(duì)裝配中所用的螺釘進(jìn)行擰緊檢查。
2.2 驗(yàn)證效果
方向受信儀凸輪返程誤差檢測(cè)統(tǒng)計(jì)情況見表5,其中射界Ⅰ為射界范圍下限點(diǎn),射界Ⅱ?yàn)樯浣绶秶舷撄c(diǎn);運(yùn)行Ⅰ為運(yùn)行范圍下限點(diǎn),運(yùn)行Ⅱ?yàn)檫\(yùn)行范圍上限點(diǎn);限速Ⅰ為限速范圍下限點(diǎn),限速Ⅱ?yàn)橄匏俜秶舷撄c(diǎn)。
高低受信儀凸輪返程誤差檢測(cè)統(tǒng)計(jì)情況見表6,其中射界Ⅰ為射界范圍下限點(diǎn),射界Ⅱ?yàn)樯浣绶秶舷撄c(diǎn);運(yùn)行Ⅰ為運(yùn)行范圍下限點(diǎn),運(yùn)行Ⅱ?yàn)檫\(yùn)行范圍上限點(diǎn)。
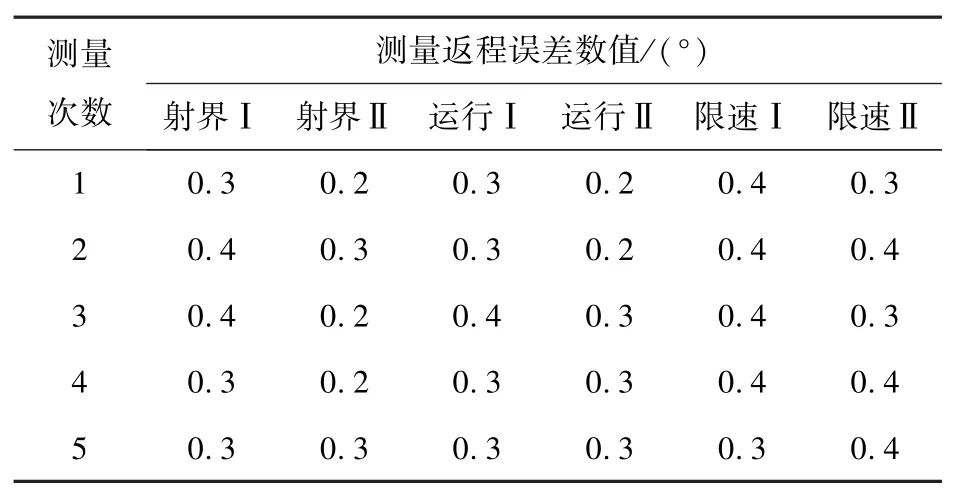
表5 方向旋回檢測(cè)結(jié)果表Table 5 Test result of direction turn process
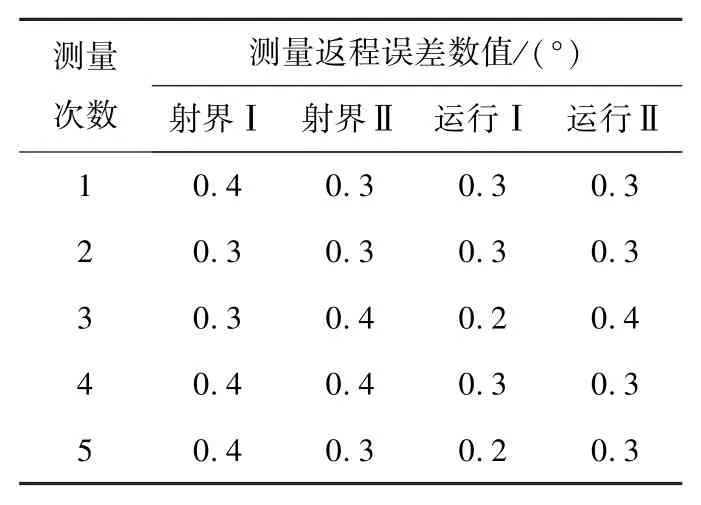
表6 高低俯仰檢測(cè)結(jié)果Table 6 Test result of pitch angle
措施實(shí)施后,凸輪返程誤差減小到0.5°以下。從表5、表6可以看出,方向旋回運(yùn)行在射界、運(yùn)行、限速等3種方式下和高低俯仰運(yùn)行在射界、運(yùn)行等2種方式下,經(jīng)過(guò)檢測(cè)凸輪返程誤差均減小到0.5°以下,達(dá)到目標(biāo)要求。
3 結(jié)束語(yǔ)
本文針對(duì)受信儀的行程開關(guān)返程誤差較大實(shí)際問(wèn)題,研究了受信儀的行程開關(guān)工作原理,建立了工作過(guò)程數(shù)學(xué)模型,采用復(fù)合形法開展了參數(shù)優(yōu)化設(shè)計(jì)。結(jié)合PDCA程序,應(yīng)用了因果圖等質(zhì)量管理工具獲得影響誤差主要因素,并逐一采取對(duì)應(yīng)措施,將凸輪行程開關(guān)的返程誤差減小到0.5°以下,提高發(fā)射裝置運(yùn)行、射界范圍的定位精度,達(dá)到了預(yù)期的目標(biāo)。