基于FPGA的車載光電系統瞄準控制與實現
2019-06-14 09:26:22李寶珺茹志兵郭新勝
火力與指揮控制 2019年4期
關鍵詞:系統
李寶珺,茹志兵,郭新勝,黨 力,韓 偉
(西安應用光學研究所,西安 710065)
0 引言
在現代軍事作戰中,對全天候、多功能光電火控系統的戰場感知能力和目標精確打擊的軍事需求進一步增加[1]。但搭載系統的坦克、裝甲偵察車等地面作戰車輛在運動中總是處于搖擺、顛簸狀態,為提高系統目標精確打擊能力,要求光電觀瞄系統不論在手動操控模式還是自動跟蹤模式下,能保證觀察者清楚地觀察、瞄準,精確打擊戰場目標。為此,光電觀瞄系統通常與穩定轉塔、控制手柄組合,形成具有穩像功能的、可操控的光電觀瞄裝置。裝置中具有較高獨立穩定精度的轉塔消除了車體橫搖、縱顛、側傾等對瞄準線的擾動,保持系統圖像穩定,以保證瞄準線穩定性。而操控手柄通過對慣性傳感器速率閉環控制,可快速、精確地跟蹤、瞄準打擊目標。
當車輛快速機動時,其搭載的某型光電觀瞄系統的控制手柄輸出的驅動信號在不經過任何電路處理送給系統時,小角速率(小于0.15 mil/s)精確控制的能力是非常差的,會造成射擊命中率不高。嚴重時,甚至出現無法準確進行瞄準控制的情況。因此,一定要通過必要的輸出特性曲線修正電路改進小角速率操控使用性能。
1 光電瞄準控制曲線修正方法
根據光電觀瞄系統構成及工作原理,系統瞄準線移動角速率控制曲線(瞄準控制特性曲線)的提取、修正主要有兩種方法:
1)當系統姿態發生變化,作為姿態量反饋器件的慣性傳感器(系統采用光纖陀螺)會有相應角速率輸出,形成與輸出角速率有關的瞄準線移動角速率控制曲線,通過修正此曲線完成瞄準控制特性的修正。
2)光電觀瞄系統瞄準線移動角度與控制手柄的輸出電壓有關。當控制手柄輸出一定大小的電壓驅動穩定轉塔時,轉塔的陀螺轉子會以一定角速率偏轉,形成與控制手柄輸出電壓有關的瞄準線移動角速率控制曲線,通過修正此曲線完成瞄準控制特性的修正。
1.1 基于光纖陀螺的光電瞄準控制特性修正
光纖陀螺是角速率光纖傳感器[2],在測量物體的姿態角和角速度上有著廣泛的應用。其工作原理是基于薩格奈克(Sagnac)效應,即同一光源在一個閉合光路中的任意一點發出兩束特征相同、傳播方向相反的光,匯合在同一點時產生干涉。若存在一個角速度,圍繞垂直于閉合光路所在平面的軸線轉動,則沿不同方向傳播的光束會產生一個光程差,該差值與角速度成正比,可根據相位差的大小以及它與光程差的關系,計算角速度并輸出[3]。相位差ΔΦs與光纖環圈的旋轉角速率Ω有如下關系[4]:

式(1)中,ΔΦs是Sagnac相位差,L是光纖長度,D是光纖環圈直徑,是光源平均波長,c是真空中光速。由式(1)可知,Sagnac相位差和光纖環圈旋轉角速率成正比,檢測相位差即可得到對應的輸出角速率。光電觀瞄系統正常工作時,安裝在系統中的光纖陀螺能夠實時感知穩定平臺相對于慣性空間的角位移。系統陀螺工作閉環控制方式來采集角速率,工作原理框圖見圖1。
當有外加擾動量時,系統穩定平臺內的框面與水平、俯仰面出現偏角,光纖陀螺中的轉子與殼體之間產生相對偏差,其敏感軸感應到有角速率變化,相應傳感器產生信號并輸出。校正電路接收后,將產生控制量補償擾動力矩,保持平臺的穩定,從而實現搭載其上的光學系統瞄線的穩定。因此,可對光電觀瞄系統瞄準線移動角速率與陀螺輸出角速率建立數學關系。通過修正角速率輸出特性,完成光電瞄準控制特性修正。
修正的原理就是減小光纖陀螺速率漂移和噪音對角速度估計誤差的影響。即通過與其他不受漂移影響,且準確度和可靠性較高的傳感器結合起來使用。在提供高精度的角速率信息同時,又可提高測量準確度,滿足高精度光電轉臺動態測角系統對測角準確度和測角精度的要求。
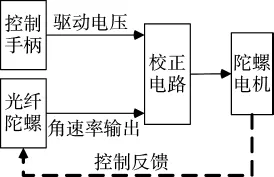
圖1 光纖陀螺閉環工作方式原理框圖
1.2 基于控制手柄的光電瞄準控制特性修正
控制手柄在車載光電觀瞄系統中是車輛乘員瞄準鎖定目標的關鍵部件,系統可通過控制手柄完成穩定平臺水平、俯仰向的轉動控制。當控制手柄的輸出電壓驅動陀螺做相應角度的偏轉時,光學系統的瞄準線會隨其做相應角度的轉動。因此,光電觀瞄系統瞄準線移動角速率與控制手柄的輸出電壓可建立一定的數學關系,即輸出一個固定電壓值,驅動穩定轉塔陀螺轉子偏轉360°,計量相應完成時間,兩者做除可計算出角速度值,完成相應驅動電壓值與角速率之間的數學模型,建立輸出特性曲線,通過修正此特性曲線完成光電瞄準控制特性修正。
2 光電瞄準控制特性修正方案選擇與修正模型
2.1 光電瞄準控制特性修正方案選擇
光纖陀螺是一種高精度角速率陀螺儀,用于穩定平臺直接進行高精度的角速率測量,是很有吸引力的[5-6]。其具有很高的帶寬和角速度測量精度,以輕易達到極高的角分辨率。然而,也存在明顯缺點,其輸出不僅受到不相關隨機噪音的影響,還受到時變擾動(隨機漂移)的影響。當利用光纖陀螺的輸出角速率進行轉角控制時,隨機速率漂移在積分中會造成角度誤差隨時間積累,不利于長時間的測角應用[7-8]及高精度轉角控制。
但控制手柄輸出電壓——角速率數學模型不存在其上述影響。先修正控制手柄電壓輸入/輸出特性,再通過一定算法疊加至陀螺輸出角速率特性,進行控制反饋,形成光電觀瞄系統瞄準控制可行性方案。因此,采用此方案以達到系統技術要求。系統瞄準控制特性修正工作原理框圖見圖2。
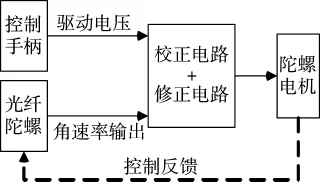
圖2 基于控制手柄的控制特性修正原理框圖
2.2 瞄準控制特性修正模型
根據系統所用控制手柄的工作原理,其輸出電壓是一個連續的、模擬的電壓信號,其與光學系統瞄準線的轉動角速度構成斜率為1的線性關系,見圖3中“實線”。在實際應用中發現,雖然控制手柄輸出一個較小電壓來驅動光學系統瞄準線轉動,但瞄準線會產生較大角速度的移動,不利于車輛靜止或運動狀態下控制瞄準線對移動目標進行瞄準。
因此,根據操控需要,對不同的角速度下的輸出特性要滿足圖3中“虛線”(預期值),曲線斜率是分段不同,當驅動電壓在(0 V,5 V]內,斜率值在(0,0.5]內;當驅動電壓在(5 V,10 V]內,斜率值在(0.5,1]內;當驅動電壓在(10 V,15 V]內,斜率值在(1,1.5]內;根據操控指標要求完成參數設置。

圖3 控制手柄的輸出特性曲線修正前后(預期)
圖3“虛線”的數學模型建立如下:
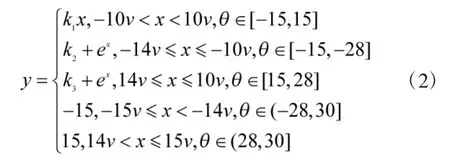
式(2)中,y是經過修正后的輸出特性,x是控制手柄的輸出電壓,θ是控制手柄的扭轉角度,k1,k2,k3是特性修正的系數。
2.3 瞄準控制特性修正電路工作原理
系統瞄準控制特性非線性修正電路對式(2)的復雜函數關系是不易實現的,但可利用存儲器函數變換技術。其基本原理是:將存儲器的地址A作為輸入量,與地址A相對應存儲單元內的數據作為輸出量D,輸入量A與輸出量D存在一一對應關系,這種關系構成一種函數關系。即在向各個存儲單元寫入數據時遵循D=F(A)映射關系,這樣可使一般的存儲器具有函數變換功能[9]。修正電路利用此技術原理將系統瞄準控制特性由線性轉換為非線性。系統瞄準控制特性修正電路設計方式是將系統可能得到的數據所對應的輸出數據事先存入存儲單元,使復雜函數關系運算變成一個查表操作,忽略復雜數學模型的估計不準確帶來的精度問題。
3 瞄準控制特性修正電路的硬件設計
修正電路的主控制器是Atmel公司的AT89C2051單片機。用于數據存儲處理的FPGA是Altera公司的CyclonII系列中的EP2C5T144。為提高轉換精度,A/D采用12 bit轉換芯片。修正電路使用運放進行A/D前級輸入電壓匹配,用以處理控制手柄輸出的模擬驅動電壓。A/D將處理后的驅動電壓轉化為數字信號,并將此作為FPGA中ROM的訪問地址。而ROM中各個地址對應的存儲單元里預先存入電壓伏值經圖3中“虛線”函數關系的反函數D(x)=Φ(V)(Φ代表斜率不同的各段函數的反函數)變換后的數字信號(即修正后的電壓值),通過訪問地址就可從對應的ROM存儲單元讀出修正后的數字信號,作為瞄準控制修正值。例如,控制手柄輸出7.5 V,經運放和A/D變換后為12位數據,再將這12位數據作為地址送入地址線,并在此地址對應的單元寫入1.2 V對應數字信號,那么只要控制手柄輸出電壓為7.5 V,就會自動從FPGA的數據線輸出1.2 V。修正后的數字特性疊加陀螺輸出角速率特性后,完成后級控制反饋。瞄準控制特性修正電路原理圖見下頁圖4。
4 瞄準控制特性修正電路軟件設計
控制系統軟件主要包括:時序控制程序、FPGA程序開發。時序控制程序主要負責系統任務進程與調度管理,完成A/D轉換、ROM讀取的時序控制。主控制器主程序工作流程如圖5所示。
FPGA實現控制核心處理電路工作。程序通過QuartusII軟件進行編寫,使用VHDL語言及利用器件內含的寄存器單元進行控制功能編寫,是整個修正電路設計的重點和難點。主要內容為選擇、設置數據寄存器、地址寄存器以及狀態寄存器。因A/D電壓轉換精度(12 bit),所以設計7FF的數據寄存器來保存相應的數據點,通過解析地址信息選擇寄存器,實現相應讀寄存器的操作。軟件設計見圖6。
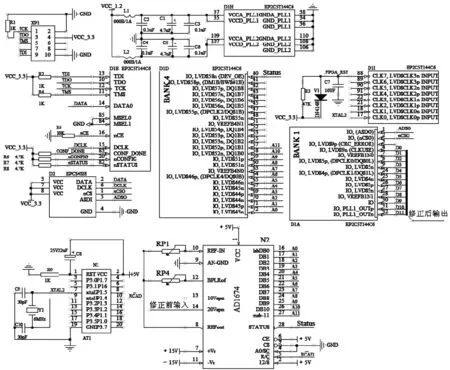
圖4 瞄準控制特性修正電路硬件原理圖
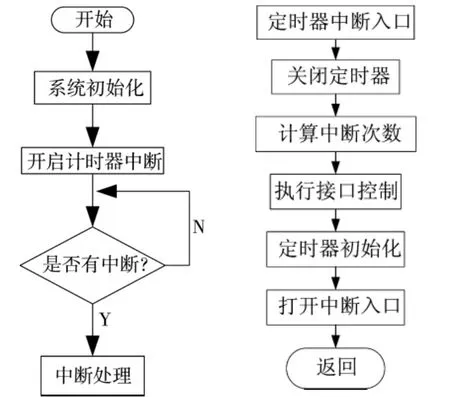
圖5 主控制器主程序工作流程圖(時序控制)
5 測試數據與分析
將瞄準控制特性修正電路用于某型光電觀瞄系統,采集控制手柄輸出電壓修正前、后的電壓值進行對比,數據見下頁表1、下頁圖7、圖8。
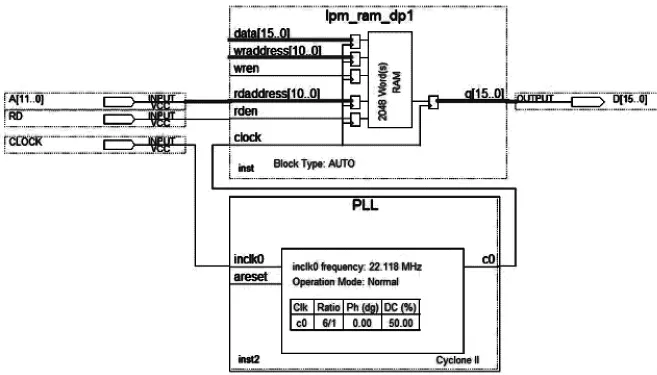
圖6 FPGA軟件設計原理圖
根據系統實測數據,描繪控制手柄輸出電壓與瞄準線跟蹤角速度的局部、低速狀態下的數學關系如圖9所示,修正值滿足系統操控要求的預期指標。
6 結論
在瞄線控制修正電路設計中利用存儲器函數變換技術,使瞄線控制特性的修正變得更加靈活,解決了以前必須先建立復雜數學模型、再使用高性能計算機才能解決的問題,提高了控制系統中數字電路的性價比。但需指出的是,上述修正方案是在逐點數據變換基礎上完成的,需要設置很多點來轉換,并在兩點之間采用數據平滑處理,使得輸出保證始終連續、不跳躍。
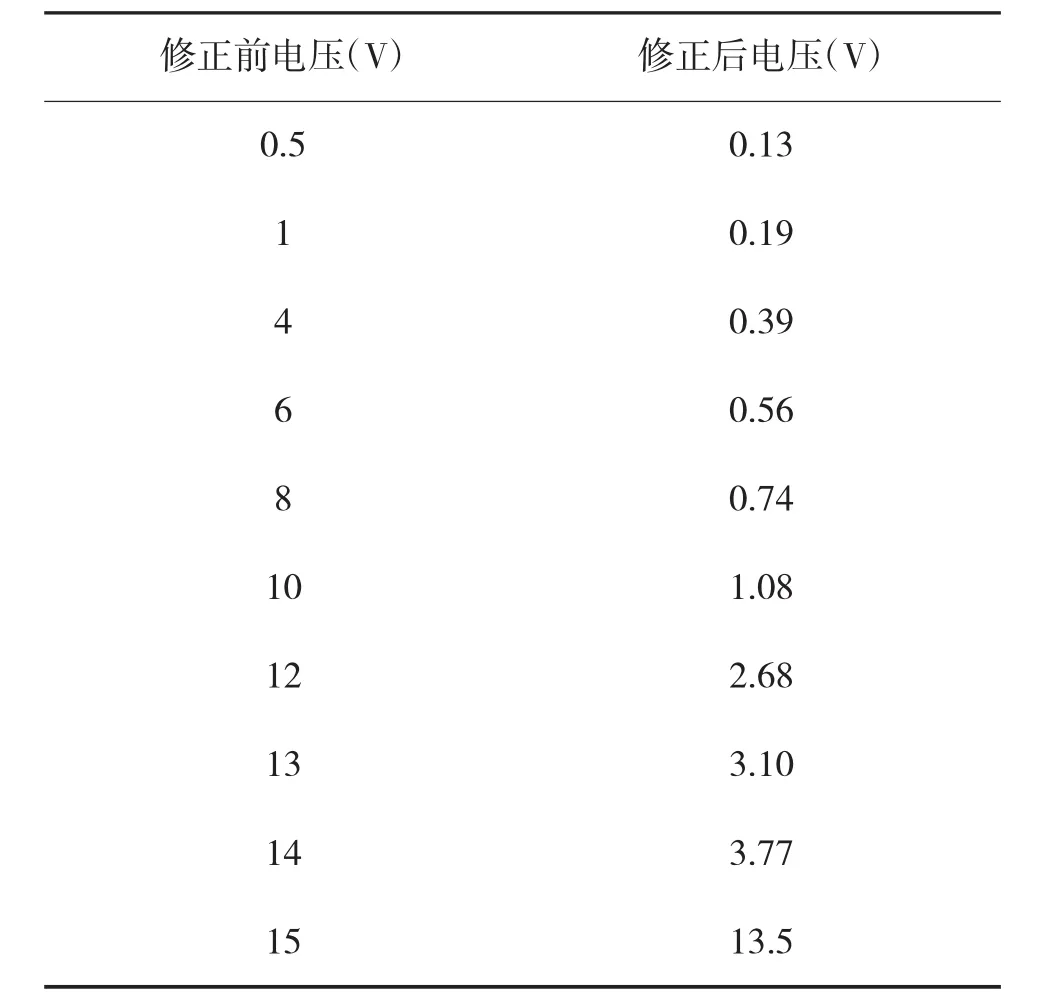
表1 控制手柄輸出電壓修正前后對比表
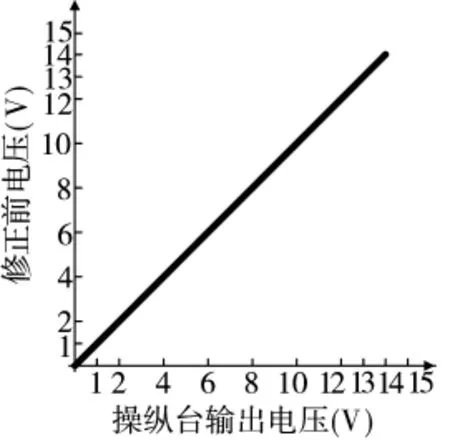
圖7 控制手柄輸出電壓修正前的輸出特性曲線
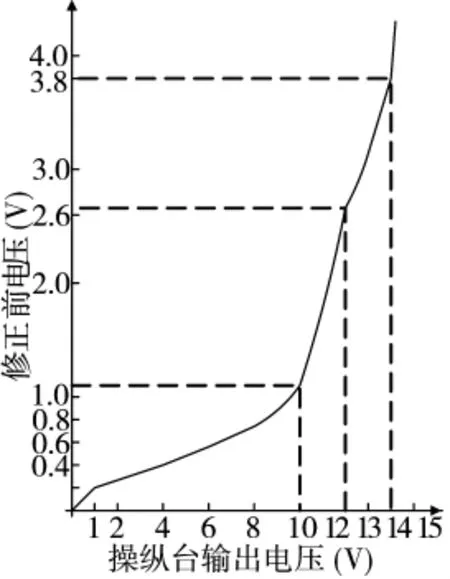
圖8 控制手柄輸出電壓修正后的輸出特性曲線
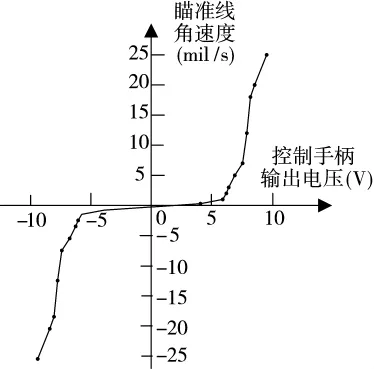
圖9 輸出電壓修正后與瞄準線角速度的曲線
此控制特性修正技術已在某型坦克的光電觀瞄系統上應用,通過改善系統穩定轉塔上姿態慣性器件角速率反饋控制量,完成瞄準精確控制。當坦克車輛快速機動時,車上光電觀瞄系統在手動操控模式下,瞄準線可以根據工況以小于0.15 mil/s的角速率精確控制,在實彈射擊試驗中得到非常滿意的人機交互體驗。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32