無人作戰分隊的不確定性作戰任務建模
2019-06-14 09:26:08武富春董祺寧何澤源
火力與指揮控制 2019年4期
張 澤,武富春,王 明,董祺寧,何澤源
(北方自動控制技術研究所,太原 030006)
0 引言
隨著信息化戰爭的不斷發展,無人武器在戰場中開始嶄露頭角,在作戰任務復雜、作戰環境惡劣的情況下,使用無人武器可以降低戰場損耗也提升了作戰效率。在基于無人武器的作戰背景下,以作戰任務為中心的特點越來越突出,在此環境下,無人分隊的任務規劃系統也變得格外重要,任務規劃的基礎是作戰任務的建模,如何用統一便捷的建模方式讓復雜多變的作戰任務變成通俗易懂、便于理解的作戰方案是本文的研究重點,為進一步轉換為計算機語言打下基礎。
國內外軍事專家在任務建模方面已經取得了一定的研究成果[1-2],文獻[3-4]對作戰任務的概念進行形式化描述,形成作戰任務的高層本體并對作戰任務的過程進行了分析與描述,能夠滿足各作戰指揮系統對任務的統一理解;文獻[5]依據作戰任務的特點,提出了一種作戰任務形式化描述的流程,采用IDEF3模型表示任務的執行過程;文獻[6]針對復雜戰場環境下作戰任務不可預知的特點,對不確定性任務形式化描述進行了進一步的研究,提出了不確定性任務形式化描述流程;文獻[7]為解決作戰任務的建模問題,提出了一種IDEF和UML建模語言相結合的建模方法。
查閱綜合的文獻,可以看出國內外專家對無人分隊的不確定性作戰任務建模方面鮮有研究。因此,本文為解決作戰任務的不確定性對無人作戰分隊在實際戰場中執行任務的影響,分析了作戰任務存在的不確定性因素,在經典的系統分析理論方法IDEF的基礎上,選擇其中符合需求的IDEF0和IDEF3作為本次研究的建模方法,加入了作戰任務的不確定性因素,提出了一種基于IDEF0和IDEF3的不確定性作戰任務建模方法。
1 作戰任務的不確定性分析
無人分隊的作戰任務是一個復雜的、多變的過程,在作戰過程中,由于戰場環境復雜多變、信息不準確等原因,會導致作戰任務遭到干擾甚至是失敗。因此,如何處理好作戰任務的不確定性因素是關鍵。本文主要考慮3個方面的不確定性:
1)作戰任務存在的不確定性。在無人分隊作戰中,總指揮員下達一個作戰命令,操作員將作戰任務輸入任務規劃系統,由系統對任務進行分解并分配給各個作戰單體,但由于情報、傳感器測量等因素的影響,任務可能是不存在的,因此,作戰任務是否存在具有不確定性。
2)任務之間的關系的不確定性。任務之間有著各類約束關系,如父任務對子任務有遞進關系,子任務與子任務之間存在順序關系,也有與關系和或關系。任務之間的各種關系是任務規劃系統根據傳感設備反饋回來的戰場態勢和情報信息進行判斷的,導致任務之間具有不確定性。
3)任務執行時間的不確定性。包括任務開始、結束時間以及任務持續時間。不同任務對執行時間有著不一樣的約束,而執行時間受到很多因素的干擾,如戰場態勢、作戰環境、各單元作戰能力、協同作戰能力等,具有很強的不確定性。
當然,在任務執行過程中也會存在一些不確定性,如機械誤差、操作員失誤等,這些屬于不可避免的,在這里不作過多的研究。
2 不確定性作戰任務建模
2.1 作戰任務建模方法分析
IDEF是美國空軍在結構化分析和設計方法基礎上發展的一套系統分析和設計方法,是比較經典的系統分析理論與方法。從IDEF0到IDEF14共有16套方法,每套方法都是通過建模程序來獲得某個特定類型的信息。
其中,IDEF0模型的基本思路是結構化分析法,它能同時表達系統的活動(用盒子表示)和數據流(用箭頭表示)以及它們的聯系,按照自頂向下,逐層分解的結構化分析描述和建立系統的功能模型。而IDEF3建模方法則適用于并行工程中的過程描述和表示。
為滿足作戰需求,作戰任務建模需要滿足幾個要求:1)自上而下的分解功能;2)任務和任務之間的邏輯時序關系;3)作戰任務本身的屬性刻畫。
而IDEF0和IDEF3兩種建模方法可以滿足以上需求,因此,選用兩者相結合的建模法來進行建模,組成如圖1所示的任務分解模型。為下一步開發人員將模型轉化為數學模型奠定基礎。
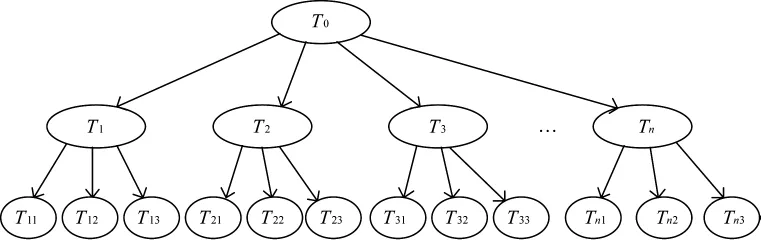
圖1 任務分解模型
2.2 作戰任務屬性描述
作戰任務的形式化描述不僅要讓任務規劃系統識別并仿真,還要使作戰人員能夠理解使用。作戰任務是對作戰使命的細化,涉及的主要因素包括:1)作戰單元的作戰環境;2)作戰目的;3)作戰關系;4)作戰時間。
在對作戰任務分析的基礎上,對其進行形式化描述,將其定義為由以下九元組組成:Task=<Name,ID,Obejct,Type,Line,Number,Operation,Δt,Time>。其中,Name表示任務名稱;ID表示作戰任務編號,是該作戰任務在任務庫的唯一標識;Object表示作戰任務目標對象;Type表示執行作戰任務的單體類型,分為兩種:無人坦克和無人裝甲車;Line表示作戰任務的隊形選擇,比如:線性隊形、三角隊形、梯形隊形;Number表示作戰任務所需要的作戰單體的個數;Operation表示執行任務所需要的能力;在任務分解的過程中,可能由于情報的不準確而導致子任務不存在,因此,定義1:Δt=p(Tj/Ti),表示上層任務Ti存在的情況下子任務Tj存在的概率;Time表示 作 戰 任 務 時 間 Time=<Time_Begin,Time_Last,Time_End>,其中Time_Begin表示任務開始的時間,Time_End表示任務結束的時間,Time_Last表示執行任務持續的時間。
2.3 基于IDEF0的作戰任務功能建模
IDEF0主要是通過簡單的圖形符號和自然語言清楚、全面地描述系統功能活動和數據流,以及各活動、數據流之間的關系。
IDEF0模型中方框表示的是一個任務的具體屬性,其中輸入可以分為3種:輸入、控制和機制,三者共同組成ICOM,IDEF0模型利用ICOM能同時表達作戰任務、作戰任務的輸入輸出信息、作戰任務的執行實體(用機制表示),以及作戰任務的控制條件(用控制表示),如圖2所示。作戰任務的輸入則為上一級任務的輸出,如果是頂層的作戰任務可以認為輸入為指揮員發出的作戰指令,以及偵察得到的情報信息。機制是對活動功能的制約和規定,在作戰任務中由裝備、隊形、數量組成,控制部分由作戰啟動時間、結束時間、執行規則和執行概率Δt組成,具體如圖3所示。
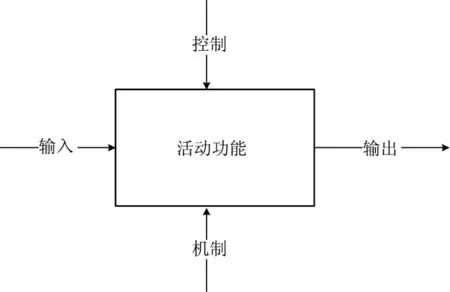
圖2 IDEF0模型示意圖
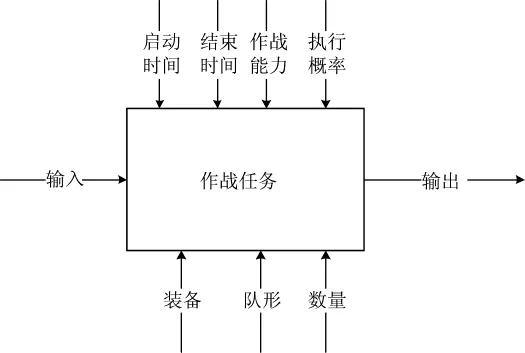
圖3 作戰任務的IDEF0模型
在對頂層任務進行逐層分解后最終得到若干個不可再分解的任務,這些任務是子任務也是無人作戰分隊最終執行的任務,子任務之間也存在一定的聯系和不確定性關系,利用IDEF0可以清楚地表示出作戰任務之間的關系以及數據流的走向。
2.4 基于IDEF3的作戰任務過程建模
IDEF3的特性在于可以通過過程流網來作為獲取、管理和顯示以過程為中心的知識的主要工具。在作戰任務中可以通過其來表示任務之間的邏輯時序關系,幫助細化作戰任務的屬性。
綜合之前學者們的研究,可以將作戰任務之間的關系歸納為4種邏輯關系,結合文獻[3]中提出的不確定性關系的描述方法,采用IDEF3提供的圖元可以準確地表達各種邏輯關系,具體映射關系如表1所示。
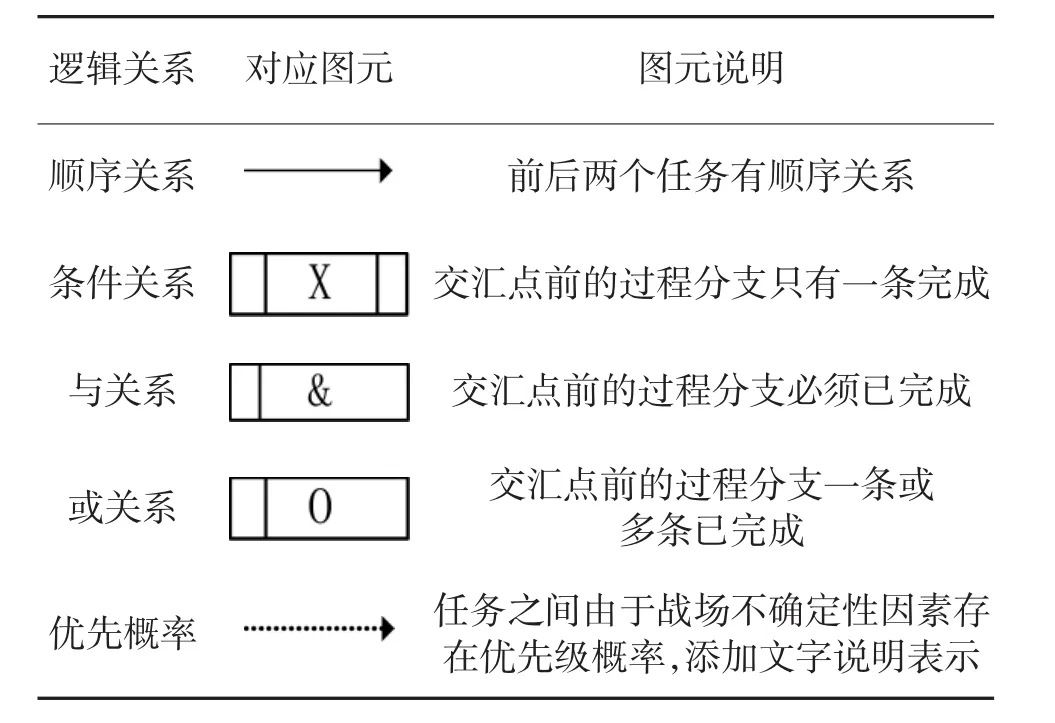
表1 任務邏輯關系映射表
在無人分隊作戰任務的分解過程中,用表1所對應的圖元建立不確定性任務分解模型,確定任務之間的邏輯時序關系。
3 不確定性作戰任務建模流程
本文首先歸納總結了作戰任務中存在的不確定性,然后介紹了IDEF0和IDEF3兩種建模方法,分析了如何用兩種方法對不確定性作戰任務進行建模,建模的流程如下:
1)對受領的總任務進行分解,得到下一層的子任務,并用IDEF0對頂層任務進行建模;
2)根據任務要求判斷是否需要進行下一步分解,若需要轉回步驟1),否則進行步驟3);
3)綜合獲取的情報資源計算分解后的子任務執行概率;
4)分析分解過程中總任務和子任務間以及子任務和子任務之間的邏輯關系,并用IDEF3對其進行建模;
5)每一次分解得到子任務,分析其間的邏輯關系,并用IDEF0對其進行建模。
通過該建模方法得到的作戰方案,充分考慮了在實際作戰過程中存在的由不確定性因素引起的突發情況,并以概率的方式表達,提出了不確定性作戰任務建模方法。讓作戰人員直觀地、明確地理解復雜的作戰任務,提高了作戰人員的工作效率,也為進一步轉換為電腦語言奠定基礎。
4 案例分析
下面給出一個具體的例子,對不確定性作戰任務進行建模分析。
假設紅藍雙方在主要奪控點僵持不下,紅方部隊要奪取主要控制點贏得戰機。紅方部署支線部隊繞過主要奪控點西側山脈至旁側行軍,截斷藍方后方部隊,但西側山脈地勢復雜,有85%的概率存在雷區,途中可能有藍方部隊的威脅;若從主要奪控點右側平原進攻,雖然東側平原地勢較為明朗,但根據情報,有75%的概率存在雷區且確定有藍方導彈部隊在此設防;主戰場上,紅方部署主力部隊以防御藍方主力。因北面有藍方支援部隊正在前來,故紅方西側支線部隊需在6 h內突破地形,到達北側A大路截斷藍方支援部隊。東側支線部隊則需清除障礙物,突破藍方封鎖線,支援主力部隊;主力部隊則需在主戰場進行防御或者視情況進行進攻。
從總體上看,該任務的目標是突襲和防守反擊,首先建立整體任務的樹狀圖,對任務進行分解分析,如圖4所示。再根據IDEF0和IDEF3的特點,首先使用IDEF0建立頂層攻占主要奪控點任務模型,如圖5所示。因為往下層分解任務存在一個流程,所以使用IDEF3建立作戰任務模型,如圖6所示。
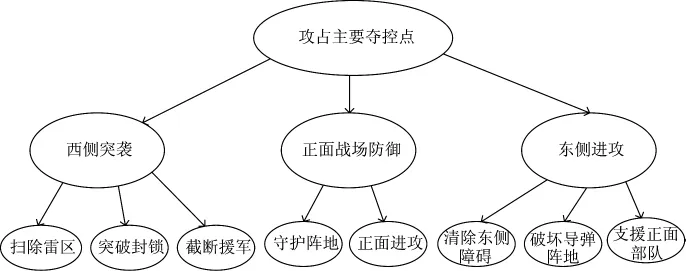
圖4 任務分解樹狀圖
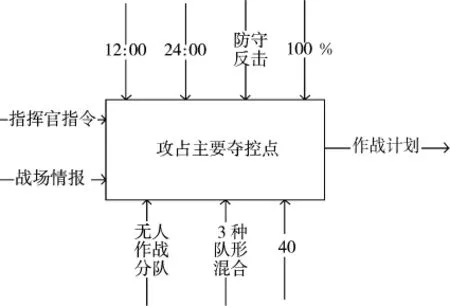
圖5 IDEF0建立頂層作戰模型
在用IDEF0建立頂層作戰模型后得到了下一步的作戰計劃,作戰計劃分為3個分支,有相互之間的關聯,因此,采用IDEF3建立分解任務模型。3個任務根據作戰需求均為必須完成的任務,執行概率為100%。
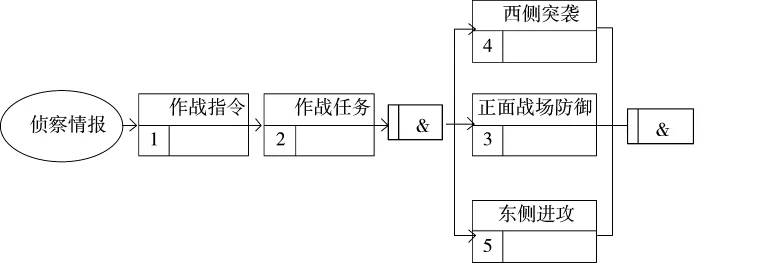
圖6 任務分解的IDEF3模型
以西側突襲任務為例,利用IDEF0的特點建立底層作戰任務的模型。西側突襲任務往下分解為3個子任務,且其相互之間有一定優先級的關聯,如圖7所示。
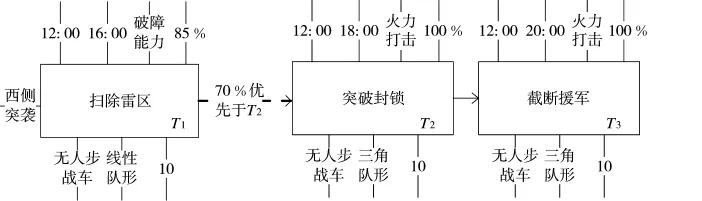
圖7 利用IDEF0為子任務建模
5 結論
本文以無人作戰分隊的不確定性任務建模作為研究目標,分析了作戰任務存在的3種不確定性。在經典的系統分析理論方法IDEF的基礎上,選擇其中符合需求的IDEF0和IDEF3作為本次研究的建模方法,加入了作戰任務的不確定性因素,給出了不確定性作戰任務建模方法。并選擇了一個紅藍雙方奪取主要控制點的案例,對其進行了不確定性作戰任務建模,證明它是一種可行、有效的建模方法。該建模方法具有一定的研究前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12