基于先驗目標概略航向的雙機搜潛方法*
2019-06-14 09:25:56張天赫彭紹雄于志軍
火力與指揮控制 2019年4期
張天赫,彭紹雄,于志軍
(1.海軍航空大學,山東 煙臺 264001;2.解放軍91206部隊,山東 青島 266000)
0 引言
吊放聲納以及聲納浮標航空反潛直升機搜潛的重要搜索設備,具有體積小,質量輕、便于攜帶等優勢,其在現代的反潛作戰過程中發揮著不可替代的作用。由于各國爭先發展潛艇技術,尤其是著力增強潛艇的續航能力和隱蔽作戰能力,僅依靠某一種搜潛裝備來捕捉潛艇變得越來越難,通常的海戰場環境下,反潛直升機采取對潛搜索探查通常是采用雙機協同作戰[1],采用吊放聲納與聲納浮標組合起來的對潛搜索陣,不僅具有很強的理論意義,而且有很大的實用價值。
有關反潛直升機采用吊放聲納或聲納浮標對潛艇進行探測的技術,國內外已經進行了很多研究,例如文獻[2]提出扇形搜索、螺旋形搜索、方形搜索、鋸齒形搜索,文獻[3-4]提出兩架反潛直升機采用雙機螺旋形搜索、雙機方形搜索等。但針對兩架反潛直升機協同作戰,利用聲納浮標和吊放聲納兩種設備對潛艇進行探查的研究還比較少。到目前為止,國內的研究僅停留在反潛直升機利用聲納浮標或者吊放聲納單一搜潛設備對潛艇進行探測的階段,缺少設計到利用多種探測潛艇設備進行聯合作戰的相關研究,也缺乏相應的理論支持和研究。充分利用多種搜潛設備對潛艇進行搜索,有利于最大程度地發揮各搜潛設備的搜索效能,提高發現潛艇的概率。為此,結合實際海戰場環境中反潛直升機搜索潛艇的過程,建立兩架反潛直升機在已知潛艇的概略航向的情況下,一架反潛直升機在潛艇航行方向的遠界[5]利用聲納浮標搜索,另外一架反潛直升機沿潛艇航行的概略方向執行扇面搜索,并進行了相應的仿真驗證。
1 反潛雙機搜索方法
“前堵后追”搜索法[6]通常是應用于應召搜索情況下,反潛直升機已經丟失目標潛艇的位置,但仍可以確認潛艇航行的概略航向。“前堵后追”搜索法中的“前堵”是指兩架反潛直升機中的一架航行至目標潛艇逃離的遠界位置,并按照搜索陣形布設攔截線形聲納浮標陣。“前堵后追法”中的“后追”,是指另外一架反潛直升機從目標潛艇的最后丟失點位置開始沿潛艇航行的概略航向執行扇面搜索。
當兩架反潛直升機執行應召搜索時,由于潛艇在航行的過程中受到海域或者航路的影響,只能向某一固定方向或一定范圍內的方向航行時,搜索遠界的反潛直升機通過布設弧形浮標攔截陣建立攔截巡邏線[7],在潛艇航行方向前方進行堵截,另外一架反潛直升機則沿著潛艇的概率航向執行扇面搜索,兩架反潛直升機的搜索示意圖如圖1所示。
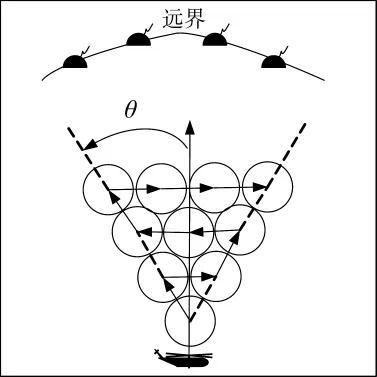
圖1 雙機前堵后追搜索示意圖
雙機反潛執行應召搜潛任務難點在于如何協同配合,發揮聲納浮標和吊放聲納搜潛優勢,充分利用有限的資源增大發現潛艇的概率,尤其是在遠界反潛直升機聲納浮標的投放位置、投放時機和陣型,近界反潛直升機吊放聲納的坐標位置及搜索時間方面。
2 反潛雙機搜索模型
現建立海戰場環境下的搜索模型,設潛艇丟失點的坐標為O(0,0);兩架反潛直升機的速度均為Vhs,在仿真狀態下的吊放聲納的作用距離為L,聲納浮標的作用距離為M,聲納浮標投放數量為K,以正東方向建立X軸,以正北方向建立Y軸。布放聲納浮標的反潛直升機投放點坐標為(Xr(i),Yr(i)),潛艇的規避逃離坐標為(Xq(i),Yq(i)),布放吊放聲納的反潛直升機投放點坐標為(Xp(i),Yp(i))。反潛直升機搜潛路線的數學推導模型[8]如下。
2.1 布設扇形浮標陣
兩架反潛直升機中的一架先飛往目標區域布設扇形浮標陣,令聲納浮標首次投放點的位置與原點的距離為R遠界,即該浮標陣的半徑長為R=R遠界。扇形浮標陣的圓心角范圍為其位置關系圖如下頁圖2所示。
搜索區遠界即反潛直升機投放聲納浮標的位置,R遠界主要由3個方面共同決定,由反潛直升機的延遲時間t延遲、在搜索區內搜索所用時間t搜索和潛艇航行的最大航行速度vmax共同決定。因此:

其中t延遲是指發現敵潛艇到反潛直升機到達目標海域進行搜索所延遲的時間[9],其主要由3部分組成:報告延遲時間t報告、反應延遲時間t反應和反潛直升機到達目標海域所需要的時間t飛行。
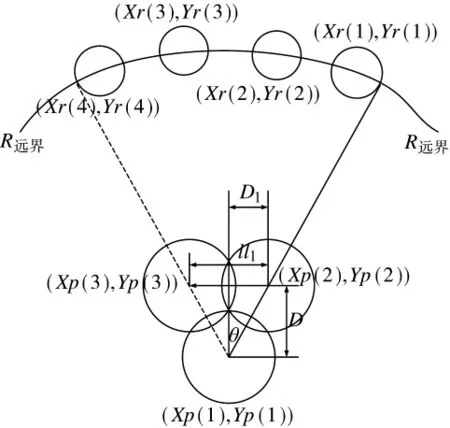
圖2 扇形搜索算法搜索點間位置關系圖

t搜索指反潛直升機投放聲納浮標一共使用的時間,通常是指從投放第1枚聲納浮標到投放完最后一枚聲納浮標所用時間。
令反潛直升機從初始位置到達扇形陣邊線兩端點的延遲時間最小的端點作為首次布放點,兩點坐標分別為:
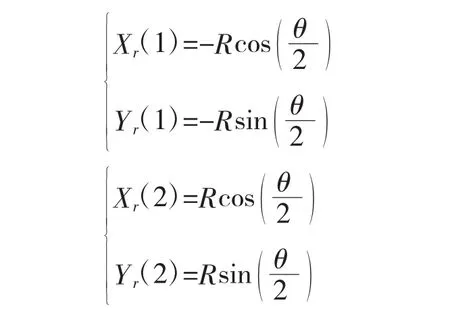
則最優的首次布放點為

Xr(i)表示第i個反潛直升機投放聲納浮標的橫坐標,Yr(i)表示第i個反潛直升機投放聲納浮標的縱坐標,將反潛直升機執行扇面搜索時的吊放聲納布放點位置進行重新排序得(Xr(1),Yr(1)),(Xr(2),Yr(2)),…,(Xr(m),Yr(m))。
2.2 使用吊放聲納進行扇面搜索
第1階段搜索路徑ll1,吊放點數N1,相鄰吊放點間的距離D1,反潛直升機在相鄰吊放點飛行時間為T1i,反潛直升機各吊放點的位置坐標及參數之間的關系如下所示。
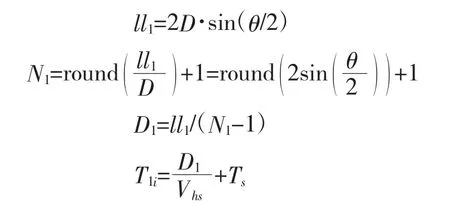
Ts是指反潛直升機在吊放點將吊放聲納下放到海水中的時間,反潛直升機在吊放點處探測、聽測目標潛艇的時間[9],反潛直升機在吊放點處將聲納從海水中收起的時間之和[10]。
同理,第j搜索階段內的參數為:
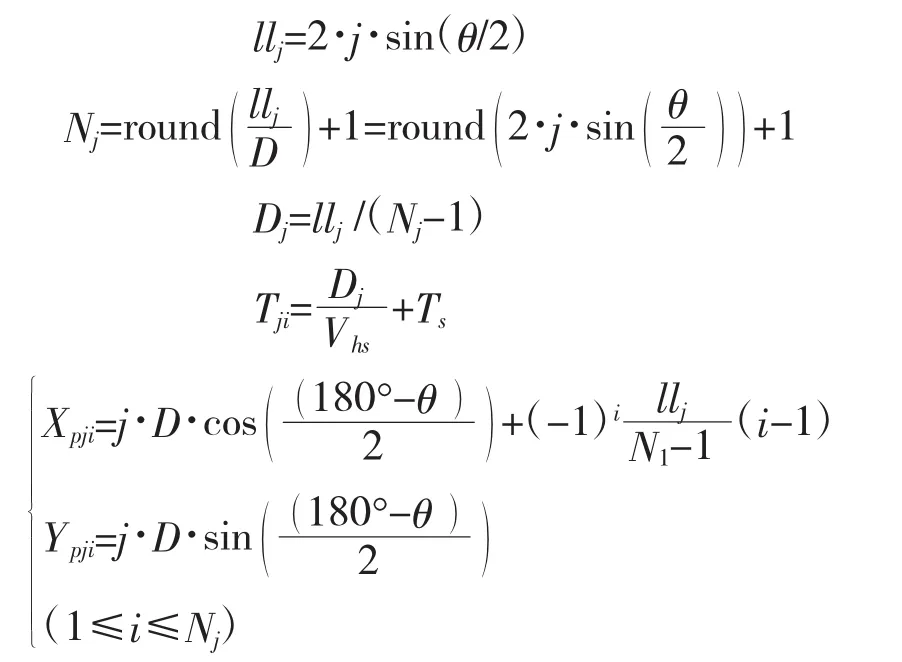
Xpji表示第j搜索階段的第i個反潛直升機吊放點的橫坐標,Ypji表示第j搜索階段的第i個反潛直升機吊放點的縱坐標,將反潛直升機各吊放點的坐標按順序重新排列分別表示為(Xp(1),Yp(1)),(Xp(2),Yp(2)),…,(Xp(m),Yp(m)),反潛直升機各吊放點的時間表示為(T(1),T(2),…,T(m))。
目標潛艇采用Vq(i)的速度航行,規避方向確定后始終保持不變(設初始航向角為β),則目標潛艇在各吊放點時刻所對應的坐標為:
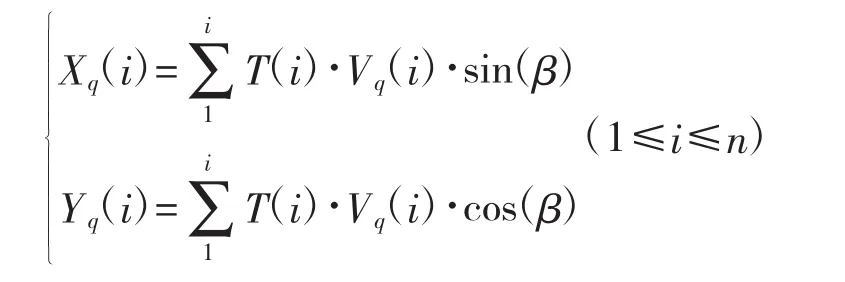
將目標各吊放點時刻的坐標進行重新排列表示為:

設在第i個吊放點處反潛直升機與目標潛艇的距離為 d(i),則有:

3 仿真計算
反潛直升機使用吊放聲納搜索到潛艇的條件為:潛艇進入聲納(聲納浮標或吊放聲納)的有效探測距離,且總搜索時間不大于3 h。
搜索算法的流程[11]:
1)確定扇形搜索區域扇角θ的大小,通常情況下扇角的范圍為 30°~60°,其最大也不超過 180°,仿真中取 θ=60°。
2)根據吊放聲納的作用半徑L、聲納浮標的作用半徑M,兩架反潛直升機的飛行速度Vhs、潛艇的航行速度Vq、相鄰吊放點間的距離D確定反潛直升機在各吊放點處的坐標(Xp(i),Yp(i)),聲納浮標的坐標(Xr(i),Yr(i)),進而確定反潛直升機的搜索路徑。
3)在每個吊放點時刻,根據反潛直升機的規避策略確定目標潛艇的位置坐標:(Xq(i),Yq(i))。
4)在每個吊放點時刻,結合目標潛艇的規避策略判斷是否滿足吊放聲納探測到目標潛艇的條件,即目標潛艇和聲納(吊放聲納或聲納浮標)之間的距離是否小于聲納(吊放聲納或聲納浮標)的戰術作用距離,如果是,則停止探測,繼續下一次仿真;否則,反潛直升機飛向下一個吊放點探測,直到探測到目標潛艇為止,沒有探測到目標潛艇但是已經消耗完所規定的搜索時間,或者是直升機搜索已達到聲納浮標位置邊界,則停止探測,再繼續下一次仿真。
5)重復1)~4)仿真 5 000次,根據蒙特卡洛法計算搜潛概率P=n/N(式中n表示在仿真中探測到潛艇的次數,N表示整個仿真次數,仿真中為了避免隨機因素的干擾通常取5 000次)。
仿真流程圖如圖3所示。
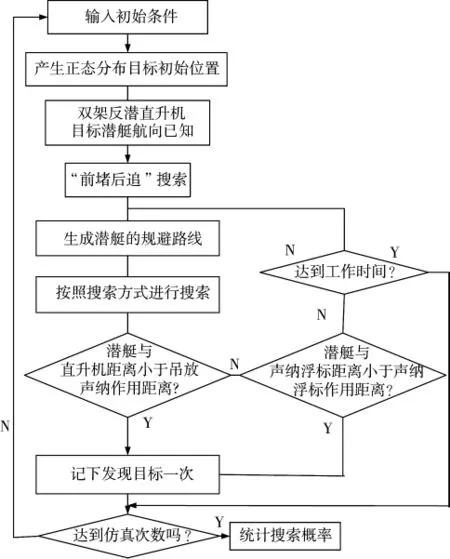
圖3 前堵后追算法仿真流程圖
設置仿真參數如下,反潛直升機距離目標潛艇丟失點位置距離[12-14]為80 n mile,取兩架反潛直升機的飛行速度為230 km/h,反潛直升機投放吊放聲納的高度為15 m,在懸停點下放吊放聲納的速度5 m/s,提升吊放聲納的速度為4 m/s,潛艇的速度在2 n mile~8 n mile內服從均勻分布,潛艇的概略方向以正北方為基準[13-14],在 -30°~30°服從均勻分布,懸停探測點間距為吊放聲納作用半徑的1.8倍,吊放聲納戰術作用距離為2 n mile,聲納浮標的戰術作用距離3.8 n mile,反潛直升機的總搜索時間為3 h,反潛直升機使用吊放聲納時探測時間4.975 min。為了增強準確性,仿真總次數假設5 000次。
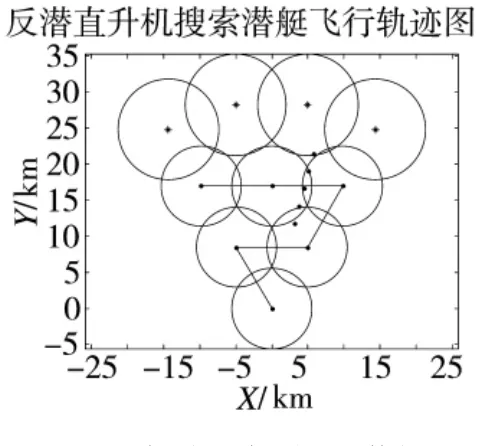
圖5 聲納浮標發現潛艇
圖4和圖5分別是仿真中由吊放聲納和聲納浮標發現目標潛艇時所獲得的仿真圖形,從圖形中可以看出雙機“前堵后追”搜潛仿真效果較好,能反映出模型的真實性。
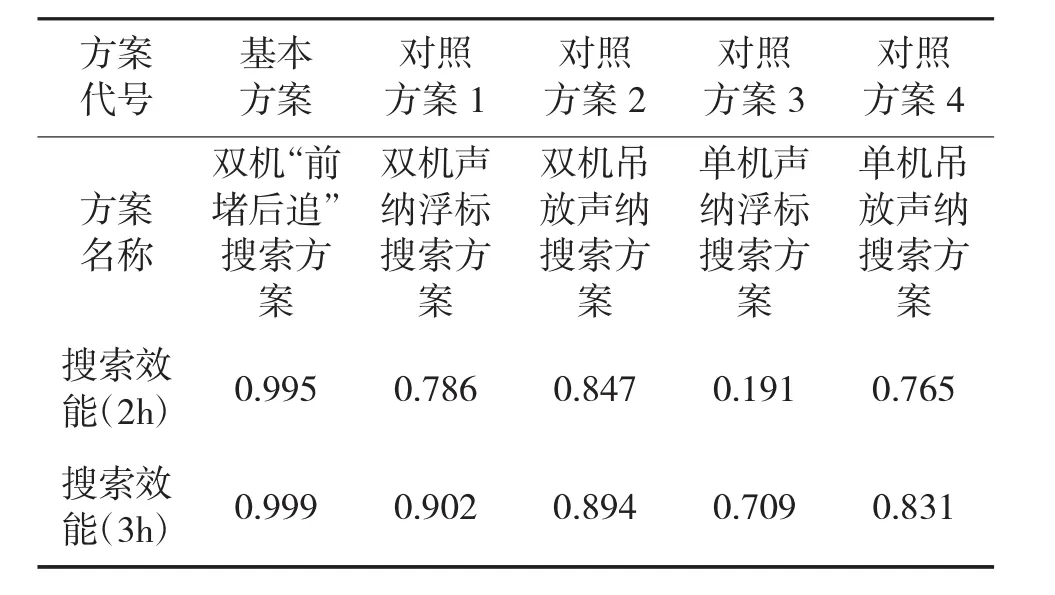
表1 各搜索方案搜索效能對照表
表1除雙機“前堵后追”搜索方案外,其他方案的搜索效能大小均取自參考文獻[6]。
從表中反映的仿真結果來看:
1)與兩架反潛直升機搜索方案相比較
兩架反潛直升機執行應召搜潛的情況下,單一地使用吊放聲納或者聲納浮標兩種搜潛方式,搜潛的效能均不如兩架反潛直升機執行“前堵后追”搜索效能高。
2)與單架反潛直升機搜索方案相比較
單架反潛直升機無論是使用聲納浮標還是使用吊放聲納,單架反潛直升機的搜潛效能均明顯不如相同情況下的兩架反潛直升機,更不如“前堵后追”搜索方案的搜索效能高。
3)仿真結果可信性分析
在實際的搜潛過程中,雙機執行應召搜潛發現潛艇的最佳時機是2 h之內[9],而從仿真的實際搜索效能可以看出2 h和3 h的搜索效能相差不大。
4 結論
本文提出了執行應召搜索時,兩架反潛直升機在已知潛艇逃離的概略航向的情況下,一架反潛直升機在潛艇逃離方向的遠界使用聲納浮標進行搜索,另一架反潛直升機從丟失點沿潛艇逃離方向進行扇形搜索,即“前堵后追”法,并通過建立基于蒙特卡洛法的搜索效能仿真模型,利用MATLAB對該搜索法的搜索效能進行了仿真。仿真結果表明,前堵后追搜索法相較于其他搜索方法的對潛發現概略有較明顯的改善,對反潛直升機搜索策略具有一定的借鑒意義。