無人機(jī)自力起飛方式研究
2019-06-14 09:25:48葉帥辰姚曉先
火力與指揮控制 2019年4期
葉帥辰,姚曉先
(北京理工大學(xué)宇航學(xué)院,北京 100081)
0 引言
無人機(jī)的概念是美國在20世紀(jì)20年代提出的,世界上第一架無人機(jī)“Kettering Bug”由美國陸軍通訊部隊(Army Signal Corps)于1918年研制成功,最初無人機(jī)的作用較為單一,常被作為航空炸彈使用。在第二次世界大戰(zhàn)期間,無人機(jī)又被作為試射靶機(jī)。直到20世紀(jì)70年代,偵查無人機(jī)和通訊無人機(jī)的概念才被逐漸提出[1]。
經(jīng)過數(shù)十年的發(fā)展,無人機(jī)已經(jīng)成為現(xiàn)代戰(zhàn)爭中不可或缺的一部分,越來越多的國家開始將其投入戰(zhàn)場,利用無人機(jī)開展攻擊、偵查等作戰(zhàn)任務(wù)。除了軍用之外,無人機(jī)近幾年在民用領(lǐng)域,如運輸、災(zāi)害預(yù)測及監(jiān)控、建筑物維護(hù)、地形測繪等,也得到了迅猛的發(fā)展[2]。
在無人機(jī)的實際應(yīng)用中,起飛和著陸兩個階段尤為重要,特別是無人機(jī)起飛方式的選擇,因為它直接決定了無人機(jī)系統(tǒng)的機(jī)動性、重復(fù)使用性、環(huán)境條件適應(yīng)性及使用成本[3]。無人機(jī)具有多種起飛方式,如手拋、彈射、火箭助推和潛射等,一般來講可按照無人機(jī)起飛升空時是否需要外部設(shè)備提供動力,將無人機(jī)的起飛方式分為自力起飛和他力起飛兩大部分。本文側(cè)重于介紹無人機(jī)的自力起飛方式。
自力起飛是指無人機(jī)在起飛時所需的動力由機(jī)上攜帶的設(shè)備提供,如發(fā)動機(jī)、旋翼或助推火箭等。對于外部供能設(shè)備的依賴性較小,大多情況只需外部設(shè)備提供支撐。自力起飛主要包括火箭助推發(fā)射,滑跑起飛和垂直起飛等幾種類型。
1 火箭助推發(fā)射(零長發(fā)射)
火箭助推發(fā)射是指將無人機(jī)放置在零程或短程導(dǎo)軌上,在1臺或多臺火箭發(fā)動機(jī)的推力作用下短時間內(nèi)加速升空,當(dāng)飛機(jī)起飛后拋掉助推火箭外殼,由無人機(jī)的自身主發(fā)動機(jī)(通常為渦噴發(fā)動機(jī))產(chǎn)生的推進(jìn)力完成后續(xù)的偵查或打擊任務(wù)。這種發(fā)射方式可以發(fā)射大、中型無人機(jī)(質(zhì)量100 kg~500 kg)并且占地面積小,可以滿足戰(zhàn)場上的機(jī)動性、快速性需求。但由于其火控發(fā)射的特點,在發(fā)射時必然會產(chǎn)生大量火光及煙塵,容易對操縱人員產(chǎn)生傷害并暴露目標(biāo)。另外,在每次發(fā)射時都會拋落1~2枚火箭推力器,使得制作成本大幅增加。此種發(fā)射方式較為成熟,多種型號的無人機(jī)都在采用。如德國/加拿大的CL-289型單助推火箭式無人機(jī),英國的“小獵鷹”雙助推火箭式無人機(jī),以色列的“哈比”型號無人機(jī)及和南非的“百靈鳥”反輻射無人機(jī)等。2010年,以色列在“哈比”無人機(jī)的基礎(chǔ)之上研發(fā)了新式自殺無人機(jī)“哈洛普”(如圖 1)[4],其可攜帶 23 kg高爆破片戰(zhàn)斗部,巡航時間可達(dá)6 h之久,從圖中的發(fā)射過程可以看出,當(dāng)飛機(jī)發(fā)射升空后兩側(cè)的助推火箭發(fā)動機(jī)外殼隨即脫落。

圖1 以色列“哈洛普”無人機(jī)
2 滑跑起飛
無人機(jī)的滑跑起飛方式與普通載人飛機(jī)類似。它是指將無人機(jī)安置在起落架(由于大部分情況下起飛后即將起落架拋棄,故又可稱為起飛車)上,利用無人機(jī)上主發(fā)動機(jī)產(chǎn)生的推力推動自身加速前進(jìn),當(dāng)達(dá)到一定速度時即可起飛。為了減小飛行時的載荷并且綜合飛機(jī)降落位置環(huán)境不確定等因素,飛機(jī)起飛后即拋下起落架,降落方式再作考慮。只有少數(shù)超大型運載無人機(jī)才會帶起落架飛行。這種起飛方式的優(yōu)點是:可以起飛大型甚至超大型無人機(jī),并且加速過程緩慢,飛機(jī)本身承受過載相對較小,可提高無人機(jī)的使用壽命,降低成本。但是其需要平整的跑道和良好的地面起飛環(huán)境,這會使得它的機(jī)動靈活性較差,不適合復(fù)雜多變的戰(zhàn)場環(huán)境。美國的“捕食者(Predator)”、“禿鷹”,以色列的“蒼鷺”,法國的“輕騎兵”,英國的“天眼”,巴西的BQM-1BR等型號的無人機(jī)都采用此種起飛方式。如圖2所示為美國部隊現(xiàn)役的“捕食者(Predator)”大型無人偵察機(jī),其機(jī)身長8.13 m,翼展14.85 m,起飛負(fù)載可達(dá)到952 kg,這種飛機(jī)與普通的載人運輸機(jī)類似,起落架固定于機(jī)身底部,當(dāng)飛機(jī)起飛后并不將起落架拋棄。

圖2 美國“捕食者”無人機(jī)
此外,為減小起飛時所需場地面積,也通常采用圓周跑道滑跑起飛。即將起飛車與一高強(qiáng)度長連桿固連,連桿另一端與固定于地面的基座通過軸承連接,使得連桿可繞基座軸線相對轉(zhuǎn)動。當(dāng)將無人機(jī)置于起飛車上時,機(jī)上主發(fā)動機(jī)產(chǎn)生的推力推動起飛車沿以基座為圓心、連桿為半徑的圓做圓周運動。起飛車達(dá)到一定的滑行速度時,機(jī)翼產(chǎn)生的升力便可使無人機(jī)沿圓周切線方向起飛。
3 垂直起飛
垂直起飛是無人機(jī)眾多發(fā)射方式中比較特殊的一種,甚至可以作為無人機(jī)研究領(lǐng)域中一個獨立的分支。這是由于在其他無人機(jī)的發(fā)射方式設(shè)計過程中,并未考慮無人機(jī)的降落方式,而以垂直起飛方式發(fā)射的無人機(jī)絕大部分也以垂直方式降落。所以垂直起飛方式的無人機(jī)又可稱為“垂直起降飛行器”。
垂直起降飛行器(VTOL)的準(zhǔn)確定義為:飛行器能以零初速度起飛或著陸,可以在空中懸停,并且具有類似固定翼飛機(jī)的水平飛行能力。這種垂直起降的方式具有初速度小、安全系數(shù)高、對起飛或著陸場地要求較低等特點,所以除軍用外,它還被大量地應(yīng)用于運輸、通信等民用領(lǐng)域。目前,90%以上的民用無人機(jī)都采用這種起降方式[5-6]。但是,正是由于這種垂直起降的特點,其在起飛的初始段或降落的末段易受到氣流擾動的影響,進(jìn)而出現(xiàn)翻機(jī)、摔機(jī)等現(xiàn)象,這就對其控制精度和氣動力的計算提出了很高的要求。目前,有大批國內(nèi)外學(xué)者正在對相應(yīng)的控制律進(jìn)行研究[7-12]。
垂直起飛方式種類很多,但大體可以分為兩種:帶有旋翼的垂直起飛和固定翼垂直起飛。
3.1 帶有旋翼的垂直起飛
這種起飛方式是利用旋翼高速旋轉(zhuǎn)時產(chǎn)生的升力使無人機(jī)豎直向上加速升起。在民用領(lǐng)域中多數(shù)無人機(jī)為此種類型。這其中,根據(jù)翼片起到的作用不同又可大致分為4種類型:
1)單一旋翼式:這種無人機(jī)只有旋翼,而無固定翼,旋翼數(shù)量可以為一至多個。其飛行過程中的機(jī)動性較好,高度調(diào)整方便,但由于缺少固定翼,會使巡航能力降低。典型的有美國的“火力偵察兵(RQ-8A 和 MQ-8B(圖 3))”、俄羅斯的 ka-137無人機(jī),以及近幾年研發(fā)的加拿大CL-227“哨兵”無人機(jī)和德國希摩斯(Seamos)無人機(jī)等。

圖3 美國“火力偵察兵”無人機(jī)
2)旋翼-固定翼復(fù)合式:該種無人機(jī)同時具有旋翼和固定翼及水平推力裝置,在單一旋翼式的基礎(chǔ)上大大提高了其水平巡航性能。典型代表為美國“龍勇士”無人機(jī)。
3)翼片轉(zhuǎn)換式:圖4為采用這種結(jié)構(gòu)形式的美國波音 X-50A“蜻蜓(Dragonfly)”無人機(jī),其典型特點是翼片較大,固定于飛機(jī)頂部,當(dāng)旋轉(zhuǎn)時可作為旋翼提供升力,而將其鎖死后又可當(dāng)作固定機(jī)翼以確保飛機(jī)進(jìn)行有效的巡航。這種翼型由于其體積、質(zhì)量較大,會導(dǎo)致轉(zhuǎn)動慣量大,效率降低,故在現(xiàn)役的無人機(jī)型號當(dāng)中所見不多。
4)升力換向式:這種形式的無人機(jī)使用較多,可以使升力和推力相互轉(zhuǎn)換,其特點是在豎直上升階段,旋翼產(chǎn)生的力用作升力,而在達(dá)到一定高度后可通過偏轉(zhuǎn)機(jī)身的某些部位,使豎直方向的升力一部分轉(zhuǎn)化為水平方向的推力。按照偏轉(zhuǎn)部位不同又可分為:偏轉(zhuǎn)旋翼式(Tilt Rotor)、偏轉(zhuǎn)機(jī)翼式(Tilt Wing)、偏轉(zhuǎn)涵道式(Tilt Ducted Fan)、偏轉(zhuǎn)機(jī)身式(Tilt Body)和尾坐式(Tail Sitter)等。美國的“鷹眼”無人機(jī)(圖5)就是利用的偏轉(zhuǎn)旋翼式結(jié)構(gòu),這種無人機(jī)機(jī)長5.18 m,翼展4.6 m,最大起飛重量136 kg。采用中單翼布局,雙垂尾內(nèi)傾,左右翼尖裝有可偏轉(zhuǎn)的旋翼來實現(xiàn)推力換向,兩副旋翼由布置在機(jī)身內(nèi)的一臺渦輪軸發(fā)動機(jī)驅(qū)動。

圖4 美國波音公司的“X-50A蜻蜓”無人機(jī)

圖5 美國貝爾公司的“鷹眼”無人機(jī)
利用升力換向式起飛的無人機(jī)種類還有很多,如近期研發(fā)的以色列“美洲豹(RQ-20A)”偏轉(zhuǎn)旋翼無人機(jī),英國“阿古斯塔AW609”無人機(jī),美國貝爾和波音公司的“空中提包”尾坐式無人機(jī)等。近年來,美國阿古斯塔-韋斯特蘭公司開發(fā)了一種Project Zero偏轉(zhuǎn)旋翼-涵道風(fēng)扇飛行器(下頁圖6),它在兩個機(jī)翼上嵌入一組大型三葉旋翼,并直接以電機(jī)驅(qū)動。同時兼具起飛(降落)和巡航兩種飛行模式,當(dāng)其處于起飛(降落)飛行模式時,涵道風(fēng)扇處于水平位置,可以提供垂直方向的升力,而處于巡航飛行模式時涵道偏轉(zhuǎn)至豎直位置,可以提供前進(jìn)推力。這種新概念飛行器全程僅以電力驅(qū)動,不需要其他任何發(fā)射裝置,整體性強(qiáng),操縱簡單,為未來旋翼垂直起飛無人機(jī)提供了研究思路[13]。

圖6 Project Zero偏轉(zhuǎn)旋翼-涵道風(fēng)扇飛行器
3.2 固定翼垂直起飛
帶有固定翼的垂直起飛無人機(jī)是固定翼飛機(jī)中比較特殊的一類,其按照起飛時無人機(jī)的擺放方式又可分為兩種。一種是在無人機(jī)起飛時,機(jī)身豎立,以垂直姿態(tài)放置于發(fā)射場上,由尾座支撐。典型的如以涵道式風(fēng)扇發(fā)動機(jī)為動力源垂直起飛的美國“金眼”無人機(jī)和保留起落架、兼具滑跑起飛和垂直起飛能力的美國“XBQM-108A”無人機(jī)(圖7)。
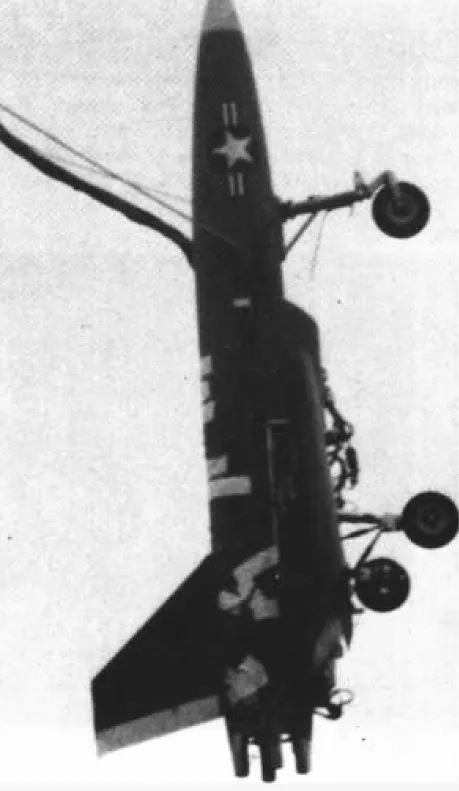
圖7 美國“XBQM-108A”無人機(jī)
另外一種是無人機(jī)在起飛時水平放置,其機(jī)身下方裝有渦噴發(fā)動機(jī),借助推力矢量技術(shù),在發(fā)動機(jī)的推力作用下實施起飛或降落。美國的OVA型、754型無人機(jī),英國的“狼蛛-鷹Tarantula-Hawk”無人機(jī)及俄羅斯近些年研制的無風(fēng)-3隱身無人機(jī)都屬于此類。
4 基于作戰(zhàn)平臺的無人機(jī)自力起飛
除前文所述的無人機(jī)陸基自力起飛方式外,無人機(jī)還可搭載于某些作戰(zhàn)平臺上進(jìn)行自力起飛,如航空母艦、運輸機(jī)、潛艇等。
4.1 無人機(jī)的空基自力起飛
無人機(jī)的空基起飛是指通過載機(jī)攜帶無人機(jī)升空,再釋放無人機(jī)的起飛方式。這其中能夠?qū)崿F(xiàn)無人機(jī)自力起飛的主要有掛載式和背負(fù)式兩類。
掛載式是將無人機(jī)掛在載機(jī)的機(jī)翼下方,當(dāng)載機(jī)達(dá)到一定飛行高度后自由投放無人機(jī),之后無人機(jī)上的助推火箭點火,為無人機(jī)提供快速前進(jìn)的動力。這種無人機(jī)的結(jié)構(gòu)與前文介紹的火箭助推發(fā)射類似,都會產(chǎn)生大量的火光及煙塵,并且需要拋落助推火箭外殼。
背負(fù)式是將帶有水平巡航翼片的無人機(jī)以一定仰角固定于載機(jī)機(jī)身上方,當(dāng)載機(jī)以一定速度向前飛行時,無人機(jī)機(jī)翼產(chǎn)生的升力可自動將其與載機(jī)分離。這種起飛方式的優(yōu)點是,無人機(jī)機(jī)身上不需要攜帶動力設(shè)備,可以使無人機(jī)的有效載荷重量最大化。但同時也會導(dǎo)致其缺乏機(jī)動性,可控性較差。
4.2 無人機(jī)的海基自力起飛
無人機(jī)的海基發(fā)射包括基于水面作戰(zhàn)平臺的艦載發(fā)射和基于深水作戰(zhàn)平臺的潛射。
基于水面作戰(zhàn)平臺的艦載發(fā)射可以選擇多種自力起飛方式,如火箭助推發(fā)射,滑跑起飛和垂直起降等。這是由于水上艦船具有寬大平整的甲板,能夠提供類似于陸基發(fā)射的良好起飛環(huán)境。但由于艦船的體積有所差別,可選擇的自力起飛方式也會受到一些局限,如帶有長直跑道的航母作戰(zhàn)平臺上多采用無人機(jī)的滑跑起飛,而中小型艦艇上多采用垂直起降或火箭助推發(fā)射等起飛方式,以節(jié)約作戰(zhàn)空間。
無人機(jī)的潛射是一項比較特殊的發(fā)射技術(shù),其涉及到水彈道技術(shù)、輕型抗壓材料技術(shù),電子元器件密封及防水技術(shù)等許多方面。并且潛射是一種自力與他力相結(jié)合的發(fā)射方式,他力環(huán)節(jié)表現(xiàn)為:裝載無人機(jī)的密封運載器通過潛艇上自帶的魚雷發(fā)射管或?qū)棸l(fā)射管發(fā)射離艇;而自力環(huán)節(jié)表現(xiàn)為:密封運載器上浮至水面后,無人機(jī)通過機(jī)身上攜帶的小型噴氣發(fā)動機(jī)或旋翼提供的升力升空,實現(xiàn)后續(xù)作戰(zhàn)任務(wù)。典型代表為美國“探索者”潛射無人機(jī),其運載器通過553 mm魚雷發(fā)射管發(fā)射離艦,上浮至水面后無人機(jī)通過垂直起飛方式升空。
5 無人機(jī)自力起飛技術(shù)國內(nèi)外研究現(xiàn)狀
目前,許多國內(nèi)外學(xué)者對無人機(jī)自力起飛技術(shù)進(jìn)行了大量的研發(fā)及分析。其中包括機(jī)械結(jié)構(gòu)設(shè)計及仿真、動力學(xué)特性分析、控制律設(shè)計等多個方面。
2014年,烏克蘭軍隊科學(xué)研究院的Valeriy Silkov[14]對滑坡滑跑起飛的無人機(jī)起飛段進(jìn)行了動力學(xué)特性分析及優(yōu)化,以使得其具有最大的能源利用效率。2015年,西北工業(yè)大學(xué)的吳成富等[15]將模糊控制策略引入無人機(jī)的滑跑起飛段中,并設(shè)計了相應(yīng)的控制律。
2016年,南京理工大學(xué)的張俊等[16]借助ANSYS有限元分析軟件對一種于滑軌上起飛的火箭助推發(fā)射無人機(jī)進(jìn)行了動力學(xué)仿真分析,得到了其在整個起飛過程中的應(yīng)力分布及各節(jié)點的速度、加速度變化曲線。南京航空航天大學(xué)的夏曼[17]設(shè)計了一種帶有螺旋槳的無人機(jī)火箭助推發(fā)射裝置,并利用PID方法對其模型的控制律進(jìn)行了設(shè)計。
2017年,中國民航大學(xué)的陳昱瑋等[18]設(shè)計了一種便攜式零長發(fā)射小型無人機(jī)發(fā)射系統(tǒng)。南京航空航天大學(xué)的王程坤等[19]建立了帶起落架無人機(jī)的地面滑跑模型,并對其進(jìn)行了動力學(xué)建模與仿真分析。Yucel Orkut Aktas等[20]設(shè)計了一臺翼身融合式固定翼垂直起降飛行器原理樣機(jī),并進(jìn)行了結(jié)構(gòu)仿真及飛行測試[21-22]。
6 無人機(jī)自力起飛技術(shù)對比分析及技術(shù)展望
無人機(jī)自力起飛技術(shù)對比如表1所示。

表1 無人機(jī)自力起飛技術(shù)對比
就現(xiàn)存的無人機(jī)自力起飛方式而言,火箭助推發(fā)射及滑跑起飛技術(shù)已經(jīng)較為成熟,世界各國的關(guān)注焦點轉(zhuǎn)向了無人機(jī)的垂直發(fā)射領(lǐng)域。而在這其中,升力換向式飛行器可以作為未來的主要發(fā)展趨勢,這是由于它繼承了固定翼飛行器和旋翼飛行器的優(yōu)點,既具有良好的巡航能力,也可在空中長時間懸停。在相同條件下應(yīng)用領(lǐng)域更加廣泛[23]。
在開發(fā)新式自力起飛方式的基礎(chǔ)上,還應(yīng)對已有的起飛方式進(jìn)行專有技術(shù)上的優(yōu)化研究。目前,應(yīng)用于火箭助推發(fā)射的多級助推火箭時序脈沖點火控制技術(shù),針對垂直起降飛行器的發(fā)動機(jī)推力矢量控制技術(shù)和電驅(qū)動升力換向技術(shù)等都得到了較好的發(fā)展。另外,為實現(xiàn)多架無人機(jī)的同時發(fā)射,還需應(yīng)用采取“邏輯與”控制通道設(shè)計和冷/熱啟動控制的無人機(jī)高可靠性集群發(fā)射控制等技術(shù)。近年來,許多智能技術(shù)被整合到了無人機(jī)發(fā)射領(lǐng)域中,如在無人機(jī)起飛過程中加入基于大數(shù)據(jù)平臺的故障檢測及判斷環(huán)節(jié),或是將傳統(tǒng)的旋翼無人機(jī)PID控制技術(shù)替換為以人工神經(jīng)網(wǎng)絡(luò)、遺傳算法、粒子群算法等智能算法為基礎(chǔ)的新型控制策略,這大大提高了無人機(jī)起飛過程中的穩(wěn)定性和執(zhí)行作戰(zhàn)任務(wù)時的可靠性。
總之,無人機(jī)起飛技術(shù)必定會向著成本低、集成度高、機(jī)動性好、使用壽命長、具有可執(zhí)行多種復(fù)雜作戰(zhàn)任務(wù)能力的方向發(fā)展。
7 結(jié)論
無人機(jī)的自力起飛技術(shù)涉及到多個學(xué)科及研究領(lǐng)域,是一項復(fù)雜的綜合性技術(shù)。在未來戰(zhàn)爭中無人機(jī)要求機(jī)動性好、生存能力強(qiáng)、成本低,因而對其發(fā)射也提出了高可靠性、高集成度等要求。本文介紹了目前主流的無人機(jī)自力起飛方式、國內(nèi)外研究現(xiàn)狀、發(fā)展趨勢,以供參考。