導(dǎo)彈數(shù)字化對(duì)接系統(tǒng)動(dòng)態(tài)測(cè)量算法設(shè)計(jì)及對(duì)接試驗(yàn)研究*
2019-05-22 01:26:24霍明英陳紫軒齊乃明姚蔚然馬劍鋒
飛控與探測(cè) 2019年2期
霍明英,張 軼,賀 龍,陳紫軒,劉 峰,白 雪,齊乃明,姚蔚然,馬劍鋒
(1.哈爾濱工業(yè)大學(xué) 航空宇航與力學(xué)工程系·哈爾濱·150001;2.北京星航機(jī)電裝備有限公司·北京·100074;3.復(fù)雜產(chǎn)品智能制造系統(tǒng)技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室·北京·100854)
0 引 言
傳統(tǒng)的導(dǎo)彈艙段對(duì)接裝配多采用剛性工裝定位和手工制孔連接的手工式裝配,這種裝配方式效率低、一致性差,且難以應(yīng)用于大型導(dǎo)彈艙段的對(duì)接裝配,不能滿足我國(guó)導(dǎo)彈高精度、高效率和高可靠性生產(chǎn)的需要。自20世紀(jì)80年代以來(lái),計(jì)算機(jī)技術(shù)和各種新的裝配工藝技術(shù)的飛躍發(fā)展使得數(shù)字化柔性對(duì)接的實(shí)現(xiàn)具備了必要的技術(shù)基礎(chǔ)。導(dǎo)彈數(shù)字化柔性對(duì)接技術(shù)的研究對(duì)我國(guó)導(dǎo)彈生產(chǎn)具有重大意義,不但能夠提高導(dǎo)彈裝配的精度和一致性,還能極大地提高裝配效率,解決大型導(dǎo)彈艙段對(duì)接裝配困難的問(wèn)題。
數(shù)字化裝配生產(chǎn)線最早出現(xiàn)在民機(jī)產(chǎn)品的裝配中。波音公司借鑒汽車工業(yè)中的洗車概念,建立了第一條飛機(jī)數(shù)字化裝配生產(chǎn)線[1]。在軍機(jī)方面,數(shù)字化裝配生產(chǎn)線已比較成熟。通過(guò)采用一種U型裝配生產(chǎn)線,使得美國(guó)F-22的裝配周期由16個(gè)月縮短為12個(gè)月[2-3]。Olsen H B[4-5]等對(duì)空客飛機(jī)部段的數(shù)字化對(duì)接裝配系統(tǒng)進(jìn)行了設(shè)計(jì)及理論研究。在國(guó)內(nèi),郭洪杰[6-7]對(duì)大型飛機(jī)數(shù)字化裝配技術(shù)進(jìn)行了綜述,并對(duì)飛機(jī)數(shù)字化裝配生產(chǎn)線的關(guān)鍵技術(shù)進(jìn)行了研究。梅中義[8]對(duì)飛機(jī)數(shù)字化裝配中的數(shù)字測(cè)量技術(shù)進(jìn)行了研究,并對(duì)目前常用的先進(jìn)數(shù)字化設(shè)備在使用條件、測(cè)量精度和優(yōu)劣勢(shì)方面進(jìn)行了比較。
在導(dǎo)彈生產(chǎn)領(lǐng)域,數(shù)字化柔性對(duì)接技術(shù)才剛剛起步,目前只有部分國(guó)外頂級(jí)導(dǎo)彈裝配單位配備了導(dǎo)彈數(shù)字化柔性對(duì)接系統(tǒng)。美國(guó)波音公司配備的導(dǎo)彈柔性對(duì)接系統(tǒng)采用了激光跟蹤儀作為對(duì)接測(cè)量系統(tǒng)實(shí)時(shí)監(jiān)測(cè)對(duì)接偏差,數(shù)字化管理系統(tǒng)根據(jù)偏差信息驅(qū)動(dòng)導(dǎo)軌式數(shù)控對(duì)接平臺(tái)完成導(dǎo)彈的艙段對(duì)接,如圖1所示。美國(guó)雷聲公司配備的導(dǎo)彈柔性對(duì)接系統(tǒng)采用了直線導(dǎo)軌式數(shù)控對(duì)接平臺(tái)作為對(duì)接執(zhí)行機(jī)構(gòu),其在六個(gè)自由度上均具有一定的調(diào)整能力,并配備了全自動(dòng)導(dǎo)彈艙段轉(zhuǎn)場(chǎng)車和自動(dòng)吊裝系統(tǒng),將整個(gè)導(dǎo)彈裝配過(guò)程中的人為影響降到了最低,確保裝配過(guò)程具有較高一致性,如圖2所示。國(guó)內(nèi)關(guān)于導(dǎo)彈數(shù)字化柔性對(duì)接技術(shù)的研究尚主要集中于理論研究。高超[9]提出采用4-ppps并聯(lián)機(jī)構(gòu)作為艙段調(diào)姿機(jī)構(gòu)進(jìn)行導(dǎo)彈數(shù)字化裝配,但未對(duì)數(shù)字化測(cè)量系統(tǒng)進(jìn)行設(shè)計(jì),也未開展艙段對(duì)接試驗(yàn)研究。王丙戌[10]等提出采用激光測(cè)距傳感器進(jìn)行位姿測(cè)量,采用串聯(lián)式艙段調(diào)整機(jī)構(gòu)實(shí)現(xiàn)艙段的六自由度調(diào)整,通過(guò)數(shù)學(xué)仿真對(duì)所提出方案的有效性進(jìn)行了驗(yàn)證,未見(jiàn)其相關(guān)對(duì)接試驗(yàn)報(bào)道。隨著高精度測(cè)量技術(shù)的發(fā)展[11-12],高精度航天系統(tǒng)裝備自動(dòng)化裝配實(shí)現(xiàn)了快速發(fā)展。

圖1 美國(guó)波音公司導(dǎo)彈柔性對(duì)接系統(tǒng)Fig.1 US Boeing missile flexible docking system

圖2 美國(guó)雷聲公司導(dǎo)彈柔性對(duì)接系統(tǒng)Fig.2 American Raytheon missile flexible docking system
針對(duì)我國(guó)導(dǎo)彈在生產(chǎn)過(guò)程中艙段對(duì)接精度差、效率低且一致性差的問(wèn)題,本文提出了一種結(jié)合激光跟蹤儀及Stewart平臺(tái)的導(dǎo)彈數(shù)字化對(duì)接系統(tǒng),對(duì)基于激光跟蹤儀的動(dòng)態(tài)測(cè)量算法進(jìn)行了設(shè)計(jì)(將高精度靜態(tài)測(cè)量與較低精度動(dòng)態(tài)測(cè)量相結(jié)合),并通過(guò)對(duì)接試驗(yàn)驗(yàn)證了所提出對(duì)接系統(tǒng)及動(dòng)態(tài)測(cè)量方法的有效性。
1 導(dǎo)彈數(shù)字化對(duì)接系統(tǒng)的組成
導(dǎo)彈數(shù)字化對(duì)接系統(tǒng)主要由對(duì)接測(cè)量系統(tǒng)、對(duì)接主控系統(tǒng)和運(yùn)動(dòng)控制系統(tǒng)所組成,如圖3所示。對(duì)接測(cè)量系統(tǒng)由激光跟蹤儀、測(cè)量監(jiān)控下位機(jī)和對(duì)接測(cè)量軟件組成,其主要功能是對(duì)導(dǎo)彈艙段的位姿信息進(jìn)行動(dòng)態(tài)跟蹤測(cè)量,并通過(guò)對(duì)接測(cè)量軟件將導(dǎo)彈艙段的位姿信息發(fā)送至對(duì)接主控系統(tǒng);主控系統(tǒng)由主控計(jì)算機(jī)和對(duì)接主控軟件組成,其主要功能是控制對(duì)接測(cè)量系統(tǒng)和運(yùn)動(dòng)控制系統(tǒng)協(xié)同工作,根據(jù)對(duì)接測(cè)量系統(tǒng)提供的位姿信息生成控制指令和控制參數(shù),控制Stewart平臺(tái),并最終實(shí)現(xiàn)自動(dòng)對(duì)接裝配;運(yùn)動(dòng)控制系統(tǒng)由Stewart平臺(tái)、運(yùn)動(dòng)控制器和調(diào)姿控制軟件組成,其主要功能是根據(jù)對(duì)接主控系統(tǒng)的控制指令和控制參數(shù),對(duì)導(dǎo)彈長(zhǎng)度的位置和姿態(tài)進(jìn)行調(diào)整。測(cè)量及控制系統(tǒng)的軟件是基于Visual Studio 2010平臺(tái)、采用C++語(yǔ)言編寫而成的。
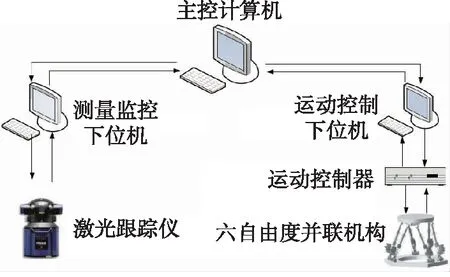
圖3 導(dǎo)彈數(shù)字化對(duì)接系統(tǒng)組成示意圖Fig.3 Schematic diagram of the missile digital docking system
在對(duì)接測(cè)量方面,激光跟蹤儀通過(guò)順序測(cè)量多個(gè)陣列靶球的位置,可以解算出目標(biāo)的位置和姿態(tài)。一定的基線長(zhǎng)度便能保證測(cè)量的精度,但是這種測(cè)量方法的缺點(diǎn)是不能進(jìn)行動(dòng)態(tài)六自由度跟蹤測(cè)量。T-Probe可以解決動(dòng)態(tài)六自由度測(cè)量問(wèn)題,但是其初始測(cè)量精度無(wú)法保證。因此,結(jié)合陣列靶球和T-Probe的優(yōu)勢(shì),通過(guò)對(duì)陣列靶球的測(cè)量進(jìn)行初始標(biāo)定及測(cè)量校正,通過(guò)T-Probe實(shí)現(xiàn)導(dǎo)彈對(duì)接艙段的動(dòng)態(tài)測(cè)量,以滿足導(dǎo)彈自動(dòng)對(duì)接裝配的需要。
T-Probe動(dòng)態(tài)姿態(tài)測(cè)量系統(tǒng)的基本工作原理是在目標(biāo)上安裝T-Probe(如圖4所示),并結(jié)合主機(jī)上的T-Cam進(jìn)行測(cè)量(如圖5所示)。T-Cam產(chǎn)品是一個(gè)基于CMOS 數(shù)字照相機(jī)的測(cè)量系統(tǒng),利用近紅外線的可見(jiàn)光工作,它的一個(gè)光學(xué)變焦系統(tǒng)和一個(gè)電機(jī)可帶動(dòng)鏡頭做豎直方向上的圓周運(yùn)動(dòng)。在被安裝在激光跟蹤儀上后,T-Cam 時(shí)刻跟蹤目標(biāo)設(shè)備,并捕捉導(dǎo)彈艙段上T-Probe紅外發(fā)光二極管的圖像。T-Cam 的角度編碼器基于跟蹤儀來(lái)控制角度,以支持T-Cam在豎直方向上的圓周運(yùn)動(dòng)。反射球集成在目標(biāo)設(shè)備中,結(jié)合導(dǎo)彈艙段上T-Probe中的一組10個(gè)紅外發(fā)光二極管,能夠?qū)-Probe相對(duì)T-Cam的3個(gè)位置參數(shù)(x、y、z)和3個(gè)姿態(tài)參數(shù)(俯仰、滾轉(zhuǎn)、偏航)進(jìn)行動(dòng)態(tài)跟蹤測(cè)量。

圖4 T-Probe動(dòng)態(tài)測(cè)量系統(tǒng)Fig.4 T-Probe dynamic measurement system

圖5 T-Cam安裝位置示意圖Fig.5 T-Cam installation location diagram
2 基于靶球的靜態(tài)高精度測(cè)量
激光跟蹤儀的測(cè)量坐標(biāo)系如圖6所示,激光跟蹤儀通過(guò)測(cè)量目標(biāo)的水平角α、垂直角β及斜距S,建立以激光跟蹤儀為中心的極坐標(biāo)系,然后根據(jù)需要將其轉(zhuǎn)換到相應(yīng)的坐標(biāo)系類型中。

圖6 激光跟蹤儀點(diǎn)坐標(biāo)測(cè)量示意圖Fig.6 Laser tracker point coordinate measurement diagram
由圖6可以看出,激光跟蹤儀是通過(guò)測(cè)量目標(biāo)點(diǎn)水平夾角α、垂直夾角β及其到原點(diǎn)的距離S來(lái)測(cè)定其空間位置的,其球坐標(biāo)轉(zhuǎn)換為直角坐標(biāo)系三坐標(biāo)的表達(dá)式如式(1)所示

(1)
其中斜距S可由IFM(激光干涉儀)或ADM(絕對(duì)測(cè)距儀)實(shí)現(xiàn)測(cè)量,而水平角和垂直角可由角度編碼器測(cè)得。另外,激光跟蹤儀也會(huì)通過(guò)儀器自身的校準(zhǔn)參數(shù)和氣象補(bǔ)償參數(shù),對(duì)測(cè)量過(guò)程中產(chǎn)生的誤差進(jìn)行補(bǔ)償。


(2)

(3)

(4)
將3個(gè)位置矢量單位化,可寫作
(5)
Q=RLSP
(6)
可以求出固定艙段坐標(biāo)系到激光跟蹤儀坐標(biāo)系的轉(zhuǎn)換矩陣RLS。
然后,根據(jù)式(7)即可求出固定艙段坐標(biāo)系原點(diǎn)在激光跟蹤儀坐標(biāo)系下的坐標(biāo)值LS=(XS,YS,ZS)T。
(7)
對(duì)于移動(dòng)艙段坐標(biāo)系,令對(duì)接端面上固定的3個(gè)靶球分別為M1、M2和M3。其中,M1和M2連線在圓形端面的直徑上,具體方法與固定艙段靶球的方式一致。建立坐標(biāo)系原點(diǎn)為對(duì)接端面的圓心,X軸沿軸向方向,并與固定艙段坐標(biāo)系的X軸指向一致,Y軸垂直于M1和M2的連線,Z軸沿M2和M1的連線方向,M1在Z軸正方向,M2在Z軸負(fù)方向,坐標(biāo)系滿足右手定則。由于移動(dòng)艙段和固定艙段的靶球固定方式一致,在此不再累述推導(dǎo)過(guò)程。根據(jù)固定艙段的測(cè)量方法和推導(dǎo)過(guò)程,可以求出移動(dòng)艙段坐標(biāo)系相對(duì)于激光跟蹤儀坐標(biāo)系的轉(zhuǎn)換矩陣RLM和移動(dòng)艙段坐標(biāo)系原點(diǎn)在激光跟蹤儀坐標(biāo)系下的坐標(biāo)值LM=(XM,YM,ZM)T。
平臺(tái)坐標(biāo)系的X軸方向與固定艙段和移動(dòng)艙段的X方向基本一致,Y軸方向垂直于平臺(tái)上端面向上,Z軸由右手定則確定。根據(jù)相同測(cè)量手段,可以求出平臺(tái)坐標(biāo)系相對(duì)激光跟蹤儀坐標(biāo)系的轉(zhuǎn)換矩陣RLP,以及平臺(tái)坐標(biāo)系原點(diǎn)在激光跟蹤儀坐標(biāo)系下的坐標(biāo)值LP=(XP,YP,ZP)T。
根據(jù)坐標(biāo)變換關(guān)系,可以求出移動(dòng)艙段坐標(biāo)系相對(duì)于固定艙段坐標(biāo)系的轉(zhuǎn)換矩陣RSM,如式(8)所示。
(8)
(9)
可求出平臺(tái)從初始姿態(tài)到最終姿態(tài)的旋轉(zhuǎn)矩陣R。根據(jù)課題實(shí)際要求,移動(dòng)艙段應(yīng)先調(diào)整偏航,再調(diào)整俯仰,最終調(diào)整滾轉(zhuǎn),即平臺(tái)坐標(biāo)系按YZX順序旋轉(zhuǎn),其轉(zhuǎn)換矩陣如式(10)所示

(10)
其中,α為平臺(tái)X軸的滾轉(zhuǎn)角,β為沿Y軸的偏航角,γ為沿Z軸的俯仰角。由于R=T,所以根據(jù)求得的R矩陣,即可通過(guò)反三角函數(shù)解算出調(diào)姿平臺(tái)應(yīng)該轉(zhuǎn)動(dòng)的角度。

(11)
3 基于T-Probe的動(dòng)態(tài)跟蹤測(cè)量
T-Probe主要用于固定艙段與移動(dòng)艙段開始對(duì)接后的動(dòng)態(tài)跟蹤測(cè)量。在對(duì)接開始前,仍然需要利用靶球測(cè)算出固定艙段、移動(dòng)艙段和平臺(tái)等的各自坐標(biāo)系相對(duì)于激光跟蹤儀坐標(biāo)系的轉(zhuǎn)換矩陣。對(duì)接開始后,通過(guò)連續(xù)測(cè)量T-Probe計(jì)算出平臺(tái)的運(yùn)動(dòng)量,用于反饋控制調(diào)姿平臺(tái)的運(yùn)動(dòng),從而完成閉環(huán)對(duì)接過(guò)程。
T-Probe自身的坐標(biāo)系及轉(zhuǎn)動(dòng)方向如圖7所示。其中定義繞X軸轉(zhuǎn)動(dòng)角為俯仰角θ,繞Y軸轉(zhuǎn)動(dòng)角為偏航角ψ,繞Z軸轉(zhuǎn)動(dòng)角為滾轉(zhuǎn)角φ。通過(guò)T-Probe上集成的反射球可以測(cè)出其雷尼紹探頭相對(duì)于激光跟蹤儀的位置;通過(guò)T-Probe上的10個(gè)LED燈陣,配合激光跟蹤儀的T-Cam,可以測(cè)出其滾轉(zhuǎn)角φ、偏航角ψ和俯仰角θ,由這3個(gè)角即可得出T-Probe坐標(biāo)系到激光跟蹤儀本體坐標(biāo)系的轉(zhuǎn)換矩陣。

圖7 T-Probe自身坐標(biāo)系及轉(zhuǎn)動(dòng)方向示意圖Fig.7 T-Probe coordinates and rotation direction diagram
根據(jù)T-Probe測(cè)得的3個(gè)歐拉角,利用激光跟蹤儀默認(rèn)的轉(zhuǎn)換順序,可以求出T-Probe坐標(biāo)系到激光跟蹤儀坐標(biāo)系的轉(zhuǎn)換矩陣Rcam,如式(12)所示
(12)
由于T-Probe被固定在運(yùn)動(dòng)控制平臺(tái)上,所以T-Probe與移動(dòng)艙段和平臺(tái)的關(guān)系是確定的,在對(duì)接過(guò)程中保持不變。因此,在對(duì)移動(dòng)艙段和平臺(tái)完成一次測(cè)量之后,便可得出三者之間的關(guān)系,從而根據(jù)T-Probe的位姿解算出平臺(tái)的運(yùn)動(dòng)量。假定由移動(dòng)艙段坐標(biāo)系到T-Probe坐標(biāo)系的轉(zhuǎn)換矩陣為RTM,則有
RTM=(Rcam)-1·RLM
(13)
T-Probe坐標(biāo)系相對(duì)于固定艙段坐標(biāo)系的轉(zhuǎn)換矩陣為
(14)

(15)
從而求得平臺(tái)的旋轉(zhuǎn)矩陣
(16)
根據(jù)此旋轉(zhuǎn)矩陣即可解算出所需要的姿態(tài)信息,進(jìn)而用來(lái)反饋控制平臺(tái)進(jìn)行運(yùn)動(dòng)。
4 導(dǎo)彈數(shù)字化對(duì)接試驗(yàn)流程
導(dǎo)彈兩艙段(模擬件)在進(jìn)行對(duì)接裝配時(shí),一般先固定一個(gè)艙段,然后移動(dòng)另外一個(gè)艙段,通過(guò)不斷地旋轉(zhuǎn)和移動(dòng)來(lái)實(shí)現(xiàn)艙段間的對(duì)接。固定艙段對(duì)接端面上設(shè)有定位銷或定位孔,移動(dòng)艙段對(duì)接端面上也會(huì)有相應(yīng)的定位孔或定位銷,這些定位銷或孔為對(duì)接端面的特征點(diǎn)。導(dǎo)彈數(shù)字化對(duì)接系統(tǒng)的對(duì)接流程為:
基于導(dǎo)彈艙段三維模型進(jìn)行測(cè)量方案規(guī)劃,確定測(cè)量系統(tǒng)配置形式和光學(xué)目標(biāo)點(diǎn)的布局;
將待裝導(dǎo)彈艙段吊裝放置在調(diào)姿平臺(tái)上,并夾持待裝導(dǎo)彈艙段,如圖8所示;

圖8 夾持待裝導(dǎo)彈艙段在等待對(duì)接Fig.8 Holding the missile segment to be docked and waiting for docking
在導(dǎo)彈艙段對(duì)接端面的定位基準(zhǔn)點(diǎn)上安裝光學(xué)靶球,確定裝配坐標(biāo)系,固定級(jí)段對(duì)接基準(zhǔn)測(cè)量圖如圖9所示,移動(dòng)艙段對(duì)接基準(zhǔn)測(cè)量如圖10所示;

圖9 固定級(jí)段對(duì)接基準(zhǔn)測(cè)量圖Fig.9 Fixed stage docking reference measurement chart

圖10 移動(dòng)級(jí)段對(duì)接基準(zhǔn)測(cè)量圖Fig.10 Mobile stage docking reference measurement chart
在位置姿態(tài)控制平臺(tái)上安裝靶球和T-Probe,如圖11所示,并用激光跟蹤儀測(cè)量運(yùn)動(dòng)控制平臺(tái)上測(cè)量標(biāo)志與對(duì)接基準(zhǔn)之間的關(guān)系,在測(cè)量完成后拆卸對(duì)接基準(zhǔn)上的靶球,準(zhǔn)備開始導(dǎo)彈艙段對(duì)接;
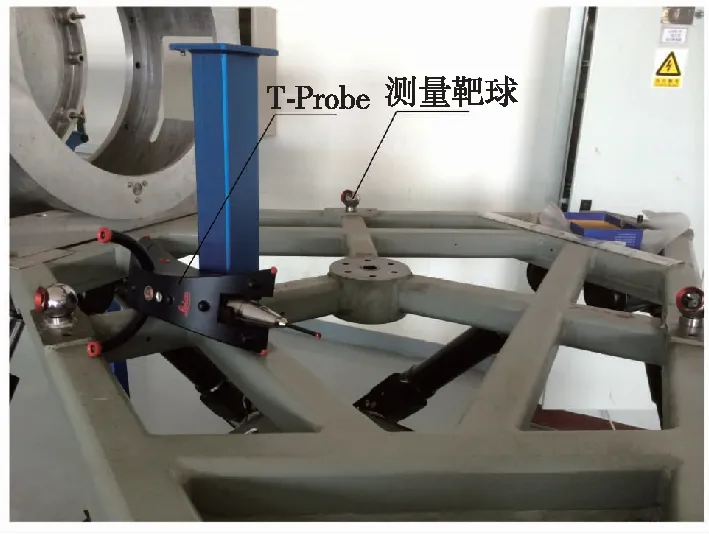
圖11 位置姿態(tài)控制平臺(tái)上的測(cè)量標(biāo)志Fig.11 Measuring marks on the position and attitude control platform
通過(guò)激光跟蹤儀測(cè)量系統(tǒng)進(jìn)行待裝導(dǎo)彈艙段的初始位姿測(cè)量,在對(duì)接主控軟件里將該位姿信息與導(dǎo)彈艙段工程數(shù)據(jù)集給出的基準(zhǔn)點(diǎn)目標(biāo)位姿進(jìn)行比對(duì)處理,得到待裝導(dǎo)彈艙段裝配位置的修正值;
將修正值傳遞給運(yùn)動(dòng)控制平臺(tái),驅(qū)動(dòng)運(yùn)動(dòng)控制平臺(tái)調(diào)整待裝導(dǎo)彈艙段的位姿;
直到導(dǎo)彈艙段的位姿達(dá)到公差允許范圍,進(jìn)而實(shí)現(xiàn)導(dǎo)彈艙段段間的精確定位;
在對(duì)接過(guò)程中,對(duì)接主控系統(tǒng)根據(jù)對(duì)接測(cè)量系統(tǒng)的測(cè)量信息實(shí)時(shí)解算執(zhí)行的效果,并進(jìn)行動(dòng)態(tài)的位姿調(diào)整,然后再進(jìn)行對(duì)接,最終自動(dòng)完成對(duì)接裝配操作,如圖12所示。

圖12 導(dǎo)彈艙段對(duì)接完成Fig.12 Missile cabin docking completed
5 導(dǎo)彈數(shù)字化對(duì)接試驗(yàn)結(jié)果及分析
為了驗(yàn)證所設(shè)計(jì)的導(dǎo)彈數(shù)字化柔性對(duì)接系統(tǒng)能否滿足導(dǎo)彈艙段對(duì)接的精度及效率需求,根據(jù)上述對(duì)接流程開展了導(dǎo)彈艙段數(shù)字化對(duì)接,導(dǎo)彈艙段之間的相對(duì)位置及姿態(tài)曲線如圖13所示。由圖13可以看出,在完成準(zhǔn)備工作之后,導(dǎo)彈數(shù)字化柔性對(duì)接系統(tǒng)僅需約25秒即可完成導(dǎo)彈艙段之間的相對(duì)位姿調(diào)整,并完成最終的艙段對(duì)接。
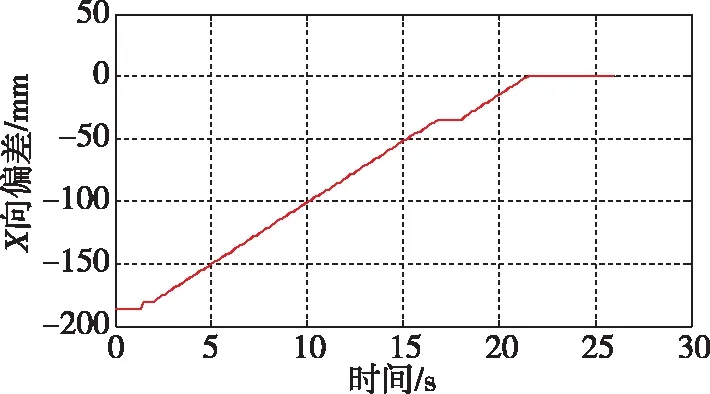
(a) X向相對(duì)偏差曲線(a) X-direction relative deviation curve

(b) Y向相對(duì)偏差曲線(b) Y-direction relative deviation curve

(c) Z向相對(duì)偏差曲線(c) Z-direction relative deviation curve

(d) 俯仰角相對(duì)偏差曲線(d) Pitch angle relative deviation curve

(e) 偏航角相對(duì)偏差曲線(e) Yaw angle relative deviation curve
(f) 滾轉(zhuǎn)角相對(duì)偏差曲線(f) Rolling angle relative deviation curve 圖13 導(dǎo)彈艙段相對(duì)位置及姿態(tài)變化曲線Fig.13 Relative position and attitude curve of missile bay
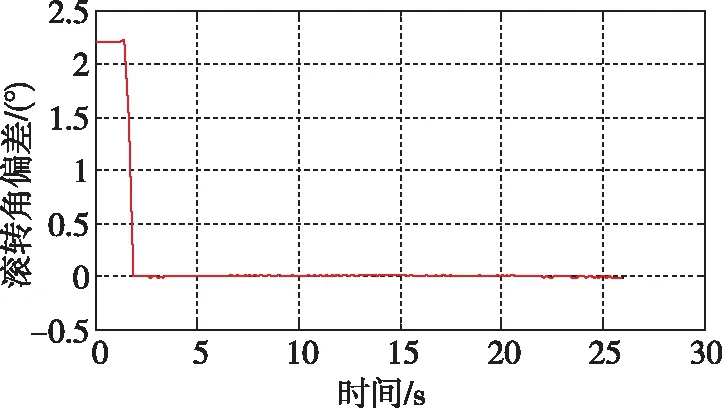
在導(dǎo)彈數(shù)字化柔性對(duì)接系統(tǒng)對(duì)接精度方面,本文主要考察了導(dǎo)向銷對(duì)接段導(dǎo)彈艙段間的相對(duì)位置及姿態(tài)偏差,過(guò)大的相對(duì)位姿偏差可導(dǎo)致無(wú)法完成對(duì)接,甚至造成對(duì)接導(dǎo)向銷的損傷。由圖14可以看出,在導(dǎo)向銷對(duì)接段導(dǎo)彈艙段間的徑向峰值偏差為0.26mm,姿態(tài)偏差為0.015°,滿足導(dǎo)彈對(duì)接導(dǎo)向銷的安全對(duì)接條件。綜上所述,所設(shè)計(jì)的導(dǎo)彈數(shù)字化柔性對(duì)接系統(tǒng)在對(duì)接精度上能夠滿足導(dǎo)彈對(duì)接的實(shí)際需要。另外,大量試驗(yàn)表明,測(cè)量系統(tǒng)誤差越大,對(duì)接控制精度越差。
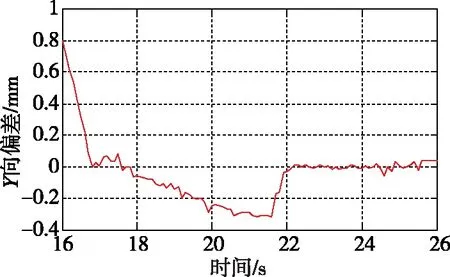
(a) Y向時(shí)間位置曲線(a) Y-direction time position curve
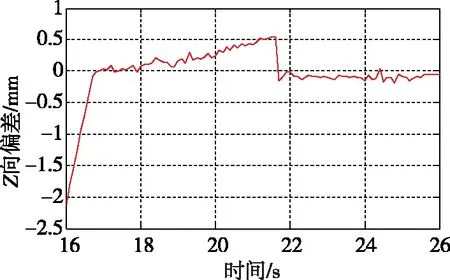
(b) Z向時(shí)間位置曲線(b) Z-direction time position curve
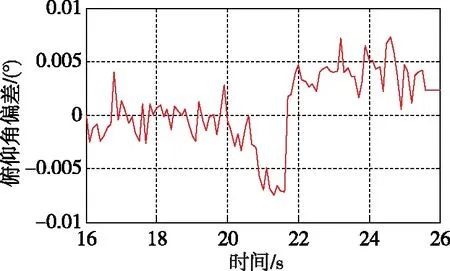
(c) 俯仰角偏差曲線(c) Pitch angle deviation curve

(d) 偏航角偏差曲線(d) Yaw angle deviation curve

(e) 滾轉(zhuǎn)角曲線(e) Rolling angle curve圖14 導(dǎo)彈艙段間相對(duì)位置及姿態(tài)變化曲線Fig.14 Relative position and attitude curve between missile bays
6 結(jié) 論
隨著航天器測(cè)量技術(shù)的發(fā)展[11-12],本文針對(duì)我國(guó)導(dǎo)彈在生產(chǎn)過(guò)程中艙段對(duì)接精度差、效率低且一致性差的問(wèn)題,提出了一種結(jié)合激光跟蹤儀及Stewart平臺(tái)的導(dǎo)彈數(shù)字化對(duì)接系統(tǒng)。在基于激光跟蹤儀的動(dòng)態(tài)測(cè)量方面,提出了將陣列靶球和T-Probe相結(jié)合的使用方法,通過(guò)對(duì)陣列靶球的測(cè)量獲得高精度基準(zhǔn),通過(guò)對(duì)T-Probe的測(cè)量實(shí)現(xiàn)動(dòng)態(tài)測(cè)量,并對(duì)陣列靶球靜態(tài)測(cè)量算法和T-Probe動(dòng)態(tài)測(cè)量算法進(jìn)行了設(shè)計(jì)。基于所提出的導(dǎo)彈數(shù)字化柔性對(duì)接系統(tǒng),進(jìn)行了導(dǎo)彈艙段數(shù)字化對(duì)接試驗(yàn)。對(duì)接試驗(yàn)的結(jié)果表明,導(dǎo)彈艙段間導(dǎo)向銷的徑向峰值偏差為0.26mm,姿態(tài)峰值偏差為0.015°,能夠滿足導(dǎo)彈對(duì)接導(dǎo)向銷的安全對(duì)接條件,且對(duì)接時(shí)間小于25s,提高了導(dǎo)彈艙段對(duì)接裝配的精度及效率。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
