路口車輛沖突與碰撞的安全邊界條件模型
2019-04-29 08:04:30朱西產(chǎn)廖茂竹
武 彪,朱西產(chǎn),廖茂竹,劉 瑞
(同濟(jì)大學(xué) 汽車學(xué)院,上海 201804)
路口是多方向車輛行駛的交匯區(qū)域,其道路環(huán)境和交通情況非常復(fù)雜,因此路口區(qū)域內(nèi)交通事故頻發(fā)且后果也較嚴(yán)重.根據(jù)相關(guān)數(shù)據(jù)統(tǒng)計(jì),路口發(fā)生的交通事故占交通事故總數(shù)的30%以上.因此,研究路口車輛軌跡交匯問(wèn)題,并基于危險(xiǎn)程度建立安全邊界條件模型,對(duì)提高路口區(qū)域安全性和通過(guò)效率具有重要意義.文獻(xiàn)[1]基于自然駕駛數(shù)據(jù),利用DREAM(Driving reliability and error analysis method)方法分析了典型路口危險(xiǎn)場(chǎng)景的誘導(dǎo)因素.文獻(xiàn)[2]分析了城市路口的諸多安全因素,通過(guò)模型擬合對(duì)路口的通行風(fēng)險(xiǎn)進(jìn)行了評(píng)價(jià),并結(jié)合安全系數(shù)對(duì)車輛進(jìn)行導(dǎo)航.文獻(xiàn)[3]利用試車跑道試驗(yàn)對(duì)本車左轉(zhuǎn)、對(duì)車左轉(zhuǎn)場(chǎng)景的駕駛員行為進(jìn)行了分析,劃分出了駕駛員的緊張域和舒適域.文獻(xiàn)[4]利用場(chǎng)地測(cè)試的數(shù)據(jù)分析了駕駛員對(duì)兩車交匯的不同時(shí)間間隙的接受程度.本文采用車輛碰撞剩余時(shí)間(Time to collision,TTC)和預(yù)估通行侵入?yún)^(qū)域時(shí)間差(Estimating post encroachment time,EPET)對(duì)不同類型的路口碰撞場(chǎng)景進(jìn)行了動(dòng)態(tài)特性分析,借助危險(xiǎn)等級(jí)評(píng)價(jià)模型,利用邏輯回歸方法,建立路口安全邊界條件模型.針對(duì)本車直行、對(duì)車左側(cè)直行(Across path across path/Left side direction,APAP/LSD)和本車左轉(zhuǎn)、對(duì)車左側(cè)直行(Left turn across path/Left side direction,LTAP/LSD)2種路口場(chǎng)景,具體計(jì)算出路口場(chǎng)景安全邊界條件.通過(guò)仿真實(shí)驗(yàn)驗(yàn)證了模型的有效性.
1 路口場(chǎng)景安全邊界條件模型
1.1 車輛動(dòng)力學(xué)參數(shù)TTC和EPET
對(duì)于直行車輛駕駛狀態(tài)的危險(xiǎn)等級(jí),一般使用碰撞剩余時(shí)間(TTC)和距離前車時(shí)間(Timeheadway,THW)2個(gè)參數(shù)進(jìn)行評(píng)估[5].TTC和THW的計(jì)算公式見(jiàn)式(1)

其中:Δd表示2車之間的距離;v1表示本車速度;v2表示目標(biāo)車輛速度.
隨著TTC和THW數(shù)值的降低,車輛行駛狀態(tài)的危險(xiǎn)等級(jí)上升,當(dāng)TTC和THW數(shù)值為0時(shí),碰撞事故發(fā)生.
路口區(qū)域存在車輛軌跡的交匯地帶(稱之為侵入?yún)^(qū)域(Encroachment zone,EZ)),如圖1所示,此時(shí)TTC和THW無(wú)法直接使用,需要使用預(yù)估通行侵入?yún)^(qū)域時(shí)間差(Estimating post encroachment time,EPET)[6]對(duì)路口交通碰撞場(chǎng)景進(jìn)行評(píng)估.
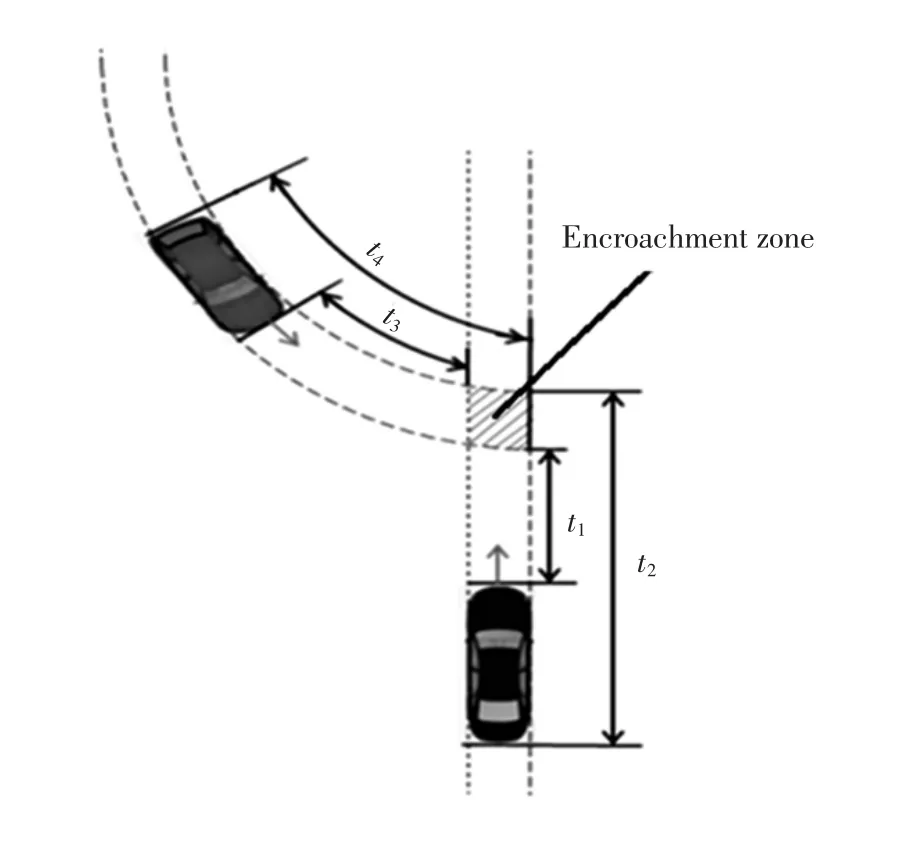
圖1 路口區(qū)域車輛軌跡交匯區(qū)域與時(shí)間差Fig.1 Trajectories and time of vehicles in intersection collision
EPET定義為前車離開(kāi)路口區(qū)域與后車進(jìn)入路口區(qū)域的時(shí)間差,其計(jì)算公式為

其中:t1和t2分別為本車進(jìn)入和駛離侵入?yún)^(qū)域的時(shí)刻;t3和t4分別為目標(biāo)車輛進(jìn)入和駛離侵入?yún)^(qū)域的時(shí)刻.在車輛未全部進(jìn)入侵入?yún)^(qū)域前,每個(gè)時(shí)間節(jié)點(diǎn)都對(duì)應(yīng)相應(yīng)的EPET參數(shù).碰撞發(fā)生前,如果本車先駛離侵入?yún)^(qū)域,則EPET=t3-t2,EPET>0;如果目標(biāo)車輛先駛離侵入?yún)^(qū)域,則EPET=t4-t1,EPET<0;當(dāng)EPET=0時(shí),則碰撞事故發(fā)生.侵入?yún)^(qū)域面積與沖突車輛的寬度相關(guān),為了精準(zhǔn)計(jì)算TTC和EPET參數(shù),模型計(jì)算過(guò)程中需要考慮車輛的長(zhǎng)度和寬度.
1.2 危險(xiǎn)等級(jí)評(píng)價(jià)模型
采用文獻(xiàn)[7]提出的駕駛員行為自動(dòng)檢測(cè)方法評(píng)價(jià)危險(xiǎn)等級(jí).該方法基于車輛的縱向加速度、橫向加速度以及橫擺加速度來(lái)表征車輛行駛狀態(tài)的危險(xiǎn)等級(jí),具體指標(biāo)見(jiàn)表1~表3[7].

表1 根據(jù)縱向加速度定義危險(xiǎn)等級(jí)Tab.1 Risk level determ ined by longitudinal acceleration
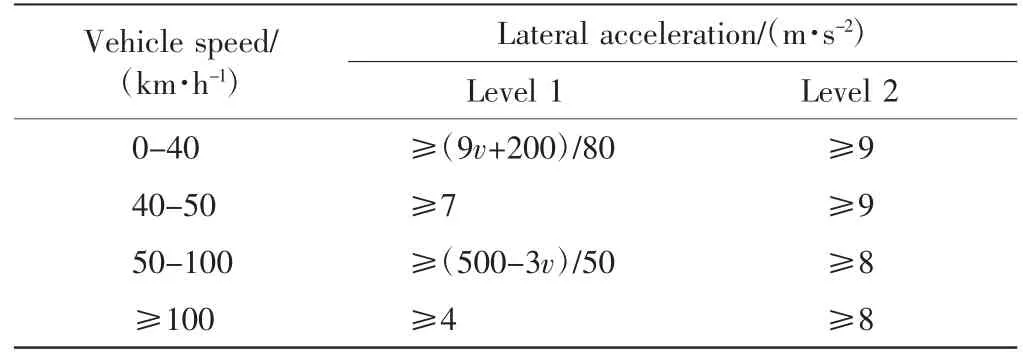
表2 根據(jù)橫向加速度定義危險(xiǎn)等級(jí)Tab.2 Risk level determ ined by lateral acceleration
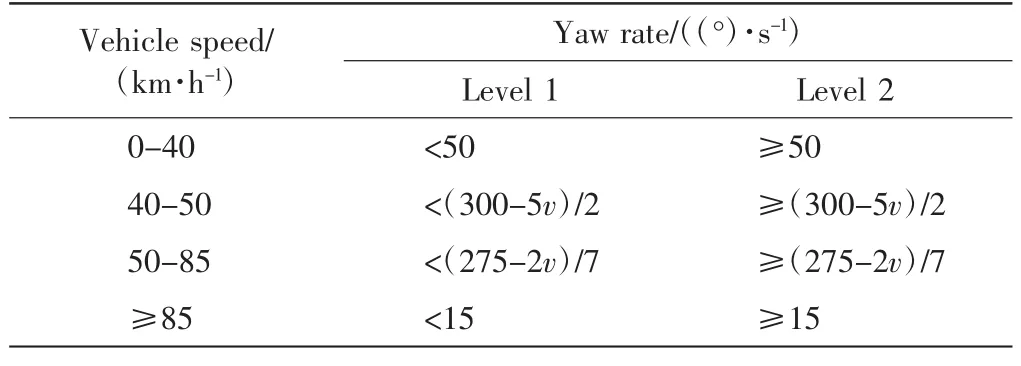
表3 根據(jù)橫擺角速度定義危險(xiǎn)等級(jí)Tab.3 Risk level determ ined by yaw rate
1.3 邏輯回歸預(yù)測(cè)模型的建立
根據(jù)駕駛員在行車過(guò)程中的心理狀態(tài)和實(shí)際安全狀況,可將以碰撞點(diǎn)為終點(diǎn)的駕駛員的正常行車過(guò)程劃分為4個(gè)區(qū)域:舒適域、非舒適域、危險(xiǎn)域和碰撞緩解域[8],如圖2所示.
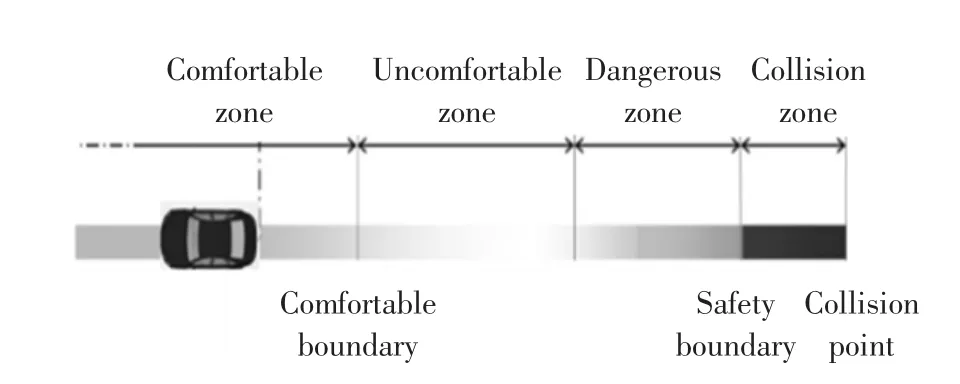
圖2 駕駛員行車過(guò)程的安全狀態(tài)圖Fig.2 Driving safety situation progress
在大多數(shù)情況下,駕駛員都處于舒適域,行車的安全程度很高.但在某些情況下,行車過(guò)程會(huì)進(jìn)入非舒適域,此類工況定義為沖突類工況,其危險(xiǎn)程度較低,出現(xiàn)頻率高,一般通過(guò)自然駕駛數(shù)據(jù)庫(kù)進(jìn)行采集和分析.危險(xiǎn)域的危險(xiǎn)程度更高,一般駕駛員不會(huì)主動(dòng)進(jìn)入這一區(qū)域,當(dāng)意外進(jìn)入這一區(qū)域后,都會(huì)主動(dòng)通過(guò)制動(dòng)減速等措施返回到更安全的區(qū)域.危險(xiǎn)域的右側(cè)邊界為安全域邊界,越過(guò)這一邊界后,行車狀態(tài)的危險(xiǎn)程度將非常高,碰撞將不可避免,只能緩解碰撞帶來(lái)的后果,所以安全域邊界到碰撞點(diǎn)的區(qū)域稱為碰撞緩解域,此類工況定義為碰撞類工況,此類工況危險(xiǎn)程度高,出現(xiàn)頻率低,需要專業(yè)的團(tuán)隊(duì)對(duì)交通事故現(xiàn)場(chǎng)進(jìn)行勘察鑒定,從而整理復(fù)現(xiàn)交通事故場(chǎng)景.
為構(gòu)建出比較完整的路口安全邊界條件模型,需要對(duì)包括車輛沖突類工況和碰撞類工況在內(nèi)的整個(gè)行駛?cè)^(guò)程進(jìn)行綜合考慮和分析.
邏輯回歸預(yù)測(cè)基于一個(gè)或多個(gè)變量(數(shù)值或分類)進(jìn)行預(yù)測(cè)分析.本文采用參數(shù)TTC和EPET作為變量構(gòu)建車輛行駛狀態(tài)危險(xiǎn)等級(jí)的邊界條件模型,具體模型為

其中:x1為T(mén)TC參數(shù);x2為EPET參數(shù);θ0、θ1、θ2為線性回歸系數(shù);hθ(z)為邏輯回歸輸出.以hθ(z)=0.5作為判斷標(biāo)準(zhǔn),當(dāng)hθ(z)<0.5時(shí),表明車輛當(dāng)前狀態(tài)為沖突狀態(tài),駕駛員可采取相對(duì)柔和的制動(dòng)減速操作避免碰撞事故;當(dāng)hθ(z)>0.5時(shí),表明車輛當(dāng)前狀態(tài)為碰撞狀態(tài),處于圖2的碰撞區(qū)域,駕駛員必須采取緊急的制動(dòng)減速操作,以降低碰撞損傷.
2 路口安全場(chǎng)景邊界條件模型構(gòu)建
2.1 數(shù)據(jù)庫(kù)與典型場(chǎng)景的選擇
本文采用的自然駕駛數(shù)據(jù)來(lái)源于中國(guó)實(shí)地運(yùn)行試驗(yàn)數(shù)據(jù)庫(kù)(The China field operation test,China-FOT),China-FOT主要收集了上海地區(qū)車輛行駛數(shù)據(jù)(包括道路環(huán)境數(shù)據(jù)),其中:64%來(lái)源于城區(qū)、30%來(lái)源于郊區(qū)、6%來(lái)自農(nóng)村地區(qū).China-FOT包含車輛的動(dòng)力學(xué)參數(shù)(如速度與偏轉(zhuǎn)角)、駕駛員控制輸入(如制動(dòng)踏板位置和方向盤(pán)轉(zhuǎn)角)以及視頻數(shù)據(jù).
本文采用的交通事故數(shù)據(jù)來(lái)源于中國(guó)交通事故深入研究數(shù)據(jù)庫(kù)(China in depth accident study,CIDAS).CIDAS中每個(gè)碰撞事故包含2 000多項(xiàng)數(shù)據(jù),如道路環(huán)境數(shù)據(jù)、車輛數(shù)據(jù)、受傷治療藥物數(shù)據(jù)、事故調(diào)查與復(fù)現(xiàn)數(shù)據(jù)等.該數(shù)據(jù)庫(kù)覆蓋國(guó)內(nèi)不同經(jīng)濟(jì)發(fā)展水平的城市,覆蓋所有路況條件和地形.
對(duì)China-FOT采集的數(shù)據(jù)進(jìn)行分段標(biāo)簽處理,通過(guò)危險(xiǎn)等級(jí)評(píng)價(jià)模型篩選提取共得到778例沖突工況,其中40例發(fā)生在路口區(qū)域.在40例路口沖突工況中,本車直行、對(duì)車對(duì)向直行(Across path across path/Opposite direction,APAP/OD)占42%;本車直行、對(duì)車左側(cè)直行(APAP/LSD)占34%;本車左轉(zhuǎn)、對(duì)車左側(cè)直行(LTAP/LSD)占15%;本車左轉(zhuǎn)、對(duì)車對(duì)向直行(Left turn across path/Opposite direction,LTAP/OD)占5%.
在CIDAS數(shù)據(jù)庫(kù)的1 200例碰撞事故中,路口事故為313例,占碰撞事故總數(shù)的26%.在128例路口左側(cè)路權(quán)碰撞場(chǎng)景中,APAP/LSD占據(jù)最高比例49%,LTAP/LSD比例為29%,本車右轉(zhuǎn)、對(duì)車左側(cè)直行(Right turn across path/Left side direction,RTAP/LSD)比例為14%.在185例路口右側(cè)路權(quán)碰撞場(chǎng)景中,本車直行、對(duì)車右側(cè)直行(APAP/RSD)占據(jù)最高比例67%,本車左轉(zhuǎn)、對(duì)車右側(cè)直行(LTAP/RSD)比例為14%,本車右轉(zhuǎn)、對(duì)車右側(cè)直行(RTAP/RSD)比例為13%.
基于數(shù)據(jù)的質(zhì)量和數(shù)量,本文選擇APAP/LSD和LTAP/LSD 2種典型的路口場(chǎng)景,基于上述已構(gòu)建的路口場(chǎng)景安全邊界條件模型,通過(guò)分析計(jì)算確定上述2種場(chǎng)景的邊界條件模型.
2.2 APAP/LSD路口場(chǎng)景
基于63個(gè)CIDAS碰撞類工況和14個(gè)China-FOT沖突類工況,得到APAP/LSD路口場(chǎng)景中TTC和EPET分布,如圖3所示.
利用機(jī)器學(xué)習(xí)算法,對(duì)圖3中77個(gè)數(shù)據(jù)點(diǎn)進(jìn)行邏輯回歸,得到各項(xiàng)回歸系數(shù)分別為θ0=3.543,θ1=-1.879,θ2=0.635,由此得到APAP/LSD的安全邊界條件模型為

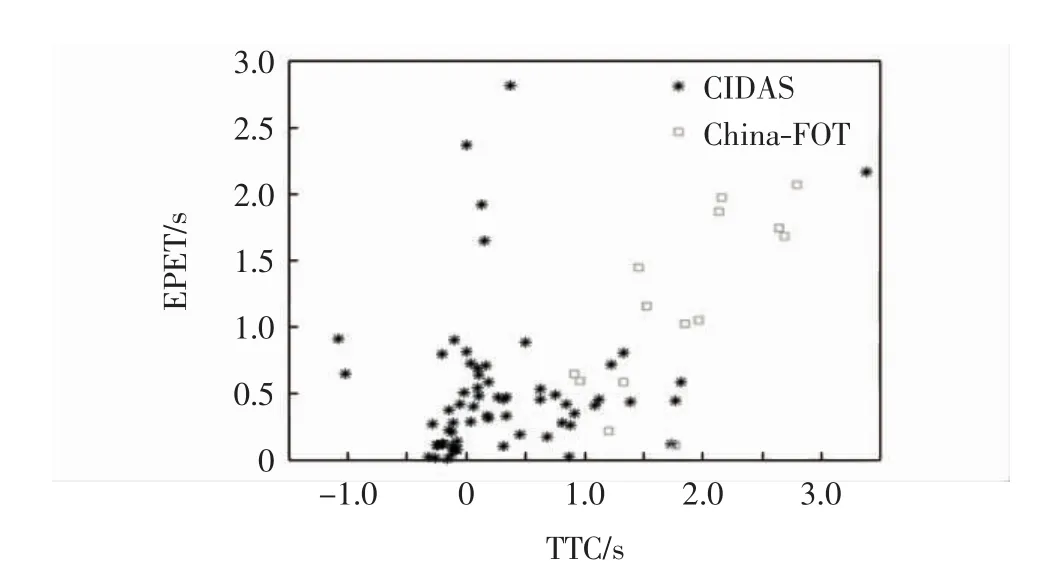
圖3 APAP/LSD路口場(chǎng)景TTC參數(shù)與EPET參數(shù)分布Fig.3 EPET and TTC for APAP/LSD intersection scenario
2.3 LTAP/LSD路口場(chǎng)景
基于37個(gè)CIDAS碰撞類工況和7個(gè)China-FOT沖突類工況,得到LTAP/LSD路口場(chǎng)景中TTC和EPET分布,如圖4所示.
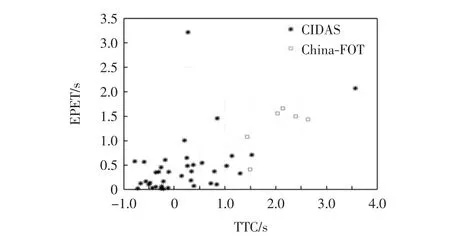
圖4 LTAP/LSD路口場(chǎng)景TTC參數(shù)與EPET參數(shù)分布Fig.4 EPET and TTC for LTAP/LSD intersection scenario
利用機(jī)器學(xué)習(xí)算法,對(duì)圖4中44個(gè)數(shù)據(jù)點(diǎn)進(jìn)行邏輯回歸,得到各項(xiàng)回歸系數(shù)分別為θ0=3.597,θ1=-0.596,θ2=2.212,由此得到LTAP/LSD的安全邊界條件模型為

3 路口安全場(chǎng)景邊界條件模型驗(yàn)證
基于路口車輛沖突的危險(xiǎn)性,本研究采用模擬仿真方法對(duì)路口碰撞場(chǎng)景進(jìn)行真實(shí)復(fù)現(xiàn),進(jìn)而針對(duì)路口安全場(chǎng)景邊界條件模型進(jìn)行驗(yàn)證分析.
路口車輛碰撞事故場(chǎng)景仿真模擬包括路口環(huán)境的真實(shí)復(fù)現(xiàn)和車輛動(dòng)力學(xué)模型精準(zhǔn)構(gòu)建.其中路口環(huán)境采用PreScan仿真軟件進(jìn)行復(fù)現(xiàn),場(chǎng)景覆蓋車輛類型、行駛軌跡、路口類型、車道數(shù)數(shù)目、交通信號(hào)燈、周邊建筑、天氣、光照等參數(shù).車輛動(dòng)力學(xué)模型通過(guò)CarSim仿真軟件進(jìn)行構(gòu)建,其中涵蓋車輛底盤(pán)、懸架、發(fā)動(dòng)機(jī)等系統(tǒng)模塊,其中本研究相關(guān)的制動(dòng)系統(tǒng)模塊需要基于不同的車輛類型進(jìn)行精準(zhǔn)構(gòu)建.
車輛整體控制策略通過(guò)Matlab Simulink進(jìn)行構(gòu)建,將路口安全場(chǎng)景邊界條件模型輸入到?jīng)Q策算法區(qū)域(Decision algorithm),從而確定車輛采取制動(dòng)操作的時(shí)間點(diǎn).將整車控制策略與PreScan軟件進(jìn)行耦合,配合CarSim軟件中的車輛動(dòng)力學(xué)模型,構(gòu)成系統(tǒng)性的閉環(huán)測(cè)試流程,對(duì)路口安全場(chǎng)景邊界條件模型進(jìn)行驗(yàn)證分析.
具體的仿真模擬流程為:(1)采用PreScan軟件真實(shí)還原事故發(fā)生前5 s本車和目標(biāo)車輛的運(yùn)動(dòng)狀態(tài)及道路環(huán)境.(2)在Matlab中采用20 Hz頻率實(shí)時(shí)計(jì)算本車和目標(biāo)車輛的TTC和EPET動(dòng)力學(xué)參數(shù),并將其作為輸入傳輸至車輛控制決策算法中.(3)基于路口安全邊界條件模型,車輛控制決策算法對(duì)本車運(yùn)動(dòng)狀態(tài)進(jìn)行實(shí)時(shí)判斷,當(dāng)判定本車運(yùn)行狀態(tài)為碰撞狀態(tài)時(shí),車輛控制決策算法發(fā)出緊急制動(dòng)指令.(4)基于CarSim軟件中車輛制動(dòng)模型,采用車輛真實(shí)的制動(dòng)壓力和路面附著系數(shù),計(jì)算本車制動(dòng)距離,判斷本車是否會(huì)與目標(biāo)車發(fā)生碰撞.該仿真模擬的基礎(chǔ)設(shè)定條件為:(1)真實(shí)復(fù)現(xiàn)事故參與車輛(本車以及目標(biāo)車)的初始狀態(tài),包括位置、速度、加速度.(2)通過(guò)安全邊界條件模型探測(cè)到路口碰撞危險(xiǎn)時(shí),本車采取制動(dòng)操作,目標(biāo)車輛無(wú)制動(dòng)或轉(zhuǎn)向操作.(3)基于安全冗余考慮,車輛制動(dòng)時(shí)采取最大制動(dòng)壓力作為輸入.
在APAP/LSD場(chǎng)景中真實(shí)復(fù)現(xiàn)63個(gè)碰撞類工況,基于路口安全場(chǎng)景邊界條件模型的控制獲得車輛采取制動(dòng)時(shí)刻的TTC和EPET參數(shù)分布以及最終時(shí)刻的本車狀態(tài)(安全/碰撞),如圖5所示.
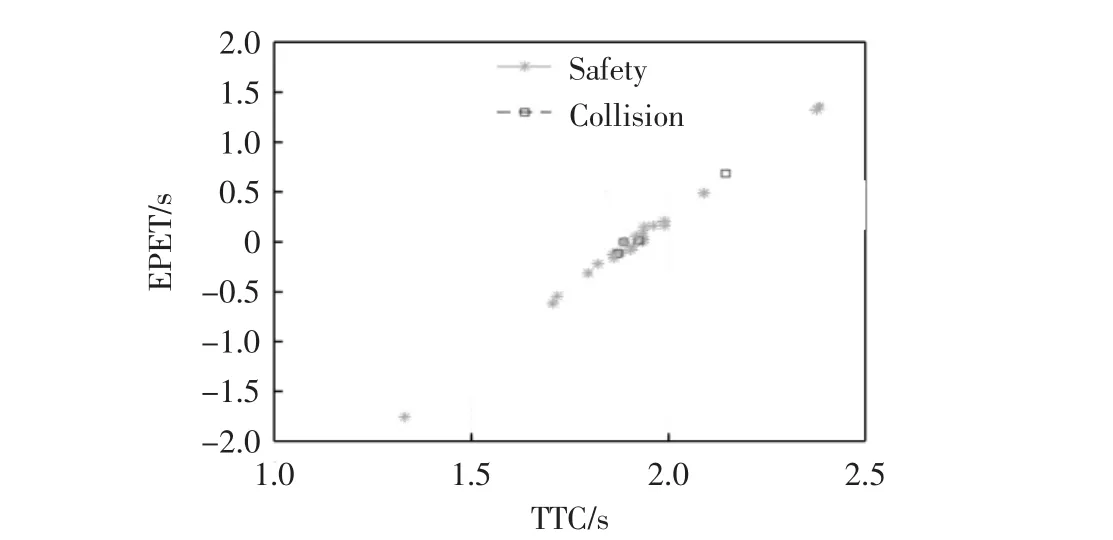
圖5 APAP/LSD仿真模擬參數(shù)分布及車輛狀態(tài)Fig.5 EPET,TTC and vehicle situation for APAP/LSD intersection scenario simulation
基于APAP/LSD路口安全場(chǎng)景邊界模型的控制,63個(gè)碰撞工況中本車制動(dòng)時(shí)刻的TTC參數(shù)分布在1.3~2.5 s的區(qū)間,與原碰撞工況相比,本車制動(dòng)時(shí)刻平均提前1.3 s,表明該路口安全場(chǎng)景邊界模型能夠提前預(yù)警.最終時(shí)刻車輛狀態(tài)結(jié)果表明,原63個(gè)碰撞工況中的59個(gè)避免了碰撞,路口碰撞事故率降低94%;對(duì)于無(wú)法避免的4個(gè)碰撞事故,本車碰撞時(shí)刻速度平均降低70%,真實(shí)碰撞速度和仿真碰撞速度對(duì)比見(jiàn)表4.
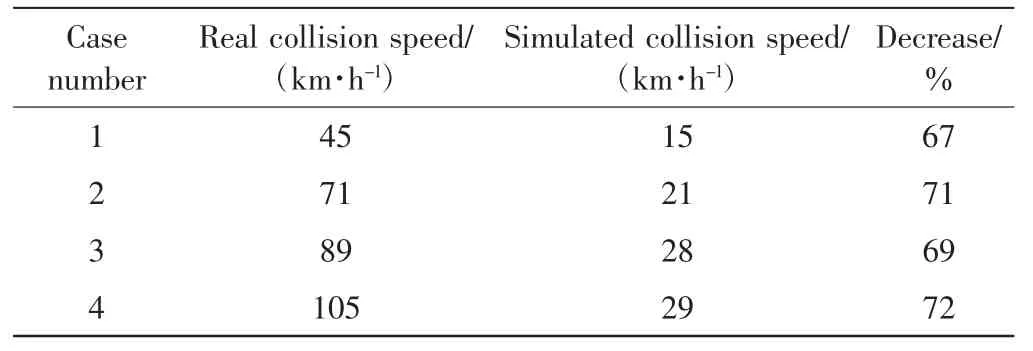
表4 APAP/LSD仿真碰撞速度分析Tab.4 Analysis of APAP/LSD simulated collision speed
在LTAP/LSD場(chǎng)景中真實(shí)復(fù)現(xiàn)37個(gè)碰撞類工況,基于路口安全場(chǎng)景邊界條件模型的控制獲得車輛采取制動(dòng)時(shí)刻的TTC和EPET參數(shù)分布以及最終時(shí)刻的本車狀態(tài)(安全/碰撞),如圖6所示.
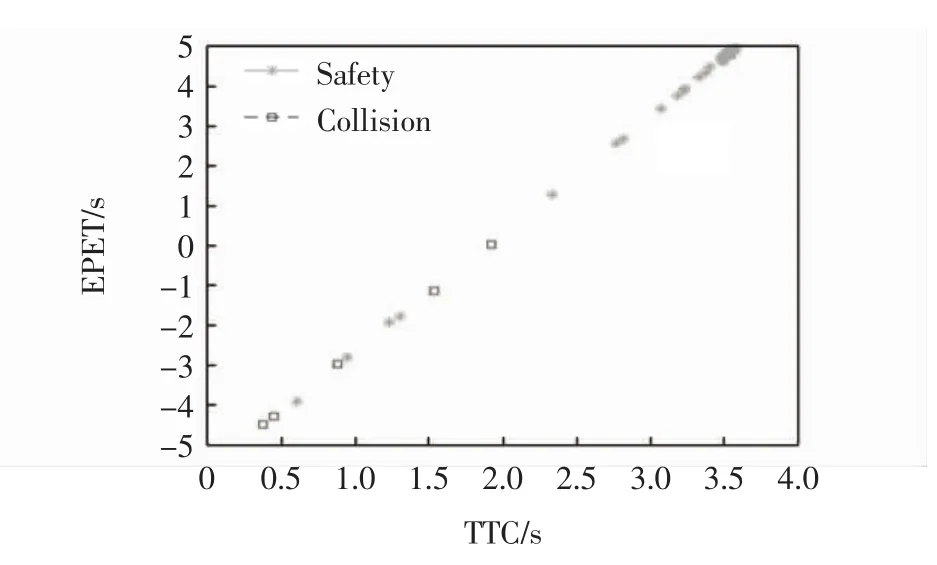
圖6 LTAP/LSD仿真模擬參數(shù)分布及車輛狀態(tài)Fig.6 EPET,TTC and vehicle situation for LTAP/LSD intersection scenario simulation
基于LTAP/LSD路口安全場(chǎng)景邊界模型的控制,車輛制動(dòng)時(shí)刻的TTC參數(shù)75%分布在2.0~3.7 s的區(qū)間,與原碰撞工況相比,本車制動(dòng)時(shí)刻平均提前1.7 s,表明該路口安全場(chǎng)景邊界模型能夠提前預(yù)警.最終時(shí)刻車輛狀態(tài)結(jié)果表明,原37個(gè)碰撞工況中的32個(gè)避免了碰撞,路口碰撞事故率降低86%;對(duì)于無(wú)法避免的5個(gè)碰撞事故,本車碰撞時(shí)刻的速度平均降低57%,真實(shí)碰撞速度和仿真碰撞速度對(duì)比見(jiàn)表5.
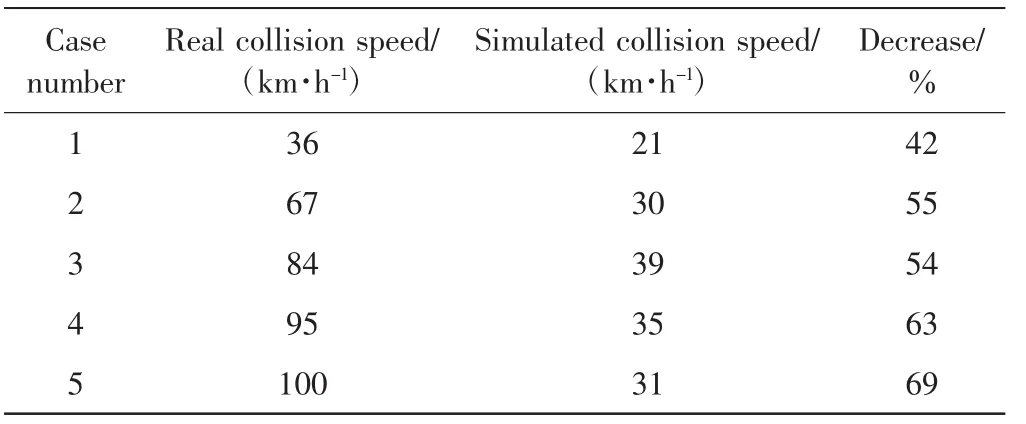
表5 LTAP/LSD仿真碰撞速度分析Tab.5 Analysis of LTAP/LSD simulated collision speed
4 結(jié)論
本文采用碰撞剩余時(shí)間TTC和預(yù)估通行侵入?yún)^(qū)域時(shí)間差EPET 2個(gè)動(dòng)態(tài)特性參數(shù),借助危險(xiǎn)等級(jí)評(píng)價(jià)模型,利用邏輯回歸方法,建立了基于車輛制動(dòng)時(shí)刻的TTC參數(shù)和EPET參數(shù)的路口場(chǎng)景安全邊界條件模型.使用China-FOT和CIDAS數(shù)據(jù)庫(kù),得到了本車直行、對(duì)車左側(cè)直行以及本車左轉(zhuǎn)、對(duì)車左側(cè)直行2種路口場(chǎng)景的具體安全邊界條件模型.通過(guò)仿真模擬對(duì)路口安全邊界條件模型進(jìn)行驗(yàn)證,分析評(píng)估其對(duì)于路口區(qū)域車輛行駛狀態(tài)的影響,結(jié)果表明所建立模型可以有效避免碰撞或減輕碰撞損傷.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
 天津師范大學(xué)學(xué)報(bào)(自然科學(xué)版)2019年2期
天津師范大學(xué)學(xué)報(bào)(自然科學(xué)版)2019年2期
- 天津師范大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 基于STM32的便攜式心電信號(hào)采集系統(tǒng)設(shè)計(jì)
- 西藏3個(gè)少數(shù)民族成人不同肥胖判定指標(biāo)與血壓的相關(guān)性
- 一種寬溫度范圍低溫度系數(shù)的CMOS帶隙基準(zhǔn)電路
- 天津?yàn)I海濕地堿地膚種子萌發(fā)和幼苗生長(zhǎng)對(duì)環(huán)境的適應(yīng)
- 寧夏哈巴湖國(guó)家級(jí)自然保護(hù)區(qū)濕地植物群落特征與生態(tài)需水量
- 白蛾周氏嚙小蜂氣味結(jié)合蛋白CcOBP3的生物信息學(xué)分析