基于GNSS與視覺融合的山地果園無人機(jī)航跡控制
2019-04-29 02:20:36范葉滿薛金儒沈楷程張海輝
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2019年4期
關(guān)鍵詞:作業(yè)
王 東 范葉滿 薛金儒 袁 端 沈楷程 張海輝,3
(1.西北農(nóng)林科技大學(xué)機(jī)械與電子工程學(xué)院, 陜西楊凌 712100; 2.農(nóng)業(yè)農(nóng)村部農(nóng)業(yè)物聯(lián)網(wǎng)重點(diǎn)實(shí)驗(yàn)室, 陜西楊凌 712100;3.陜西省農(nóng)業(yè)信息感知與智能服務(wù)重點(diǎn)實(shí)驗(yàn)室, 陜西楊凌 712100)
0 引言
無人機(jī)技術(shù)[1-2]已經(jīng)被廣泛應(yīng)用于農(nóng)情監(jiān)測、農(nóng)業(yè)植保等領(lǐng)域[3-11]。相關(guān)研究表明,無人機(jī)的飛行航跡、高度、速度等飛行參數(shù)對植保效果影響顯著[12-17]。
飛行航跡的控制是無人機(jī)航空作業(yè)的關(guān)鍵問題。由于人工控制無人機(jī)飛行航跡精度較差[18],為了提高無人機(jī)植保作業(yè)的效果,降低人為控制的誤差,無人機(jī)航跡自主控制技術(shù)是近年來無人機(jī)航空植保作業(yè)的研究熱點(diǎn)。FAICAL等[19]提出了結(jié)合作物特征和無人機(jī)結(jié)構(gòu)特征的微調(diào)設(shè)置以控制航跡;袁玉敏[20]設(shè)計(jì)的基于GPS(全球定位系統(tǒng))和GPRS(通用分組無線服務(wù)技術(shù))混合的定位算法,提高了農(nóng)業(yè)植保無人機(jī)的定位精度;盧璐等[21]基于實(shí)時(shí)動(dòng)態(tài)差分技術(shù)(Real-time kinematic,RTK)的北斗衛(wèi)星導(dǎo)航系統(tǒng)優(yōu)化了植保無人機(jī)飛控系統(tǒng),大幅度提高了作業(yè)航跡的精度。此外,也有將全球?qū)Ш叫l(wèi)星系統(tǒng)(Global navigation satellite system,GNSS)與慣性導(dǎo)航、視覺導(dǎo)航等技術(shù)相融合進(jìn)行無人機(jī)航跡控制的研究[22-25],但現(xiàn)有研究均是針對平原下大田塊作業(yè)開展的。
我國丘陵山地約占國土面積的70%。同平原相比,丘陵山地不僅地形起伏多變,且田塊碎小、形狀各異。丘陵山地多以經(jīng)濟(jì)林果為主栽對象,果樹沿坡地等高線種植,果樹行多為曲線,同大田作物相比覆蓋率較低,因此,對航跡控制精度要求更高。在GNSS導(dǎo)航過程中,如果以果樹行首尾位置的經(jīng)緯度為定位點(diǎn)導(dǎo)航,無人機(jī)以兩定位點(diǎn)之間的直線飛行,則會錯(cuò)過其中不在直線航跡上的果樹,無法實(shí)現(xiàn)植保作業(yè)的果樹遍歷飛行要求。相反,如果以單株果樹為定位點(diǎn),則定位點(diǎn)過密,同時(shí)受GNSS系統(tǒng)刷新頻率限制,以及無人機(jī)在飛行過程中受到的速度、側(cè)風(fēng)等因素的干擾,極容易錯(cuò)過當(dāng)前目標(biāo)點(diǎn),導(dǎo)致無人機(jī)需要反復(fù)移動(dòng)以到達(dá)目標(biāo)點(diǎn)。因此,該方式極易浪費(fèi)作業(yè)時(shí)間和能量,降低作業(yè)效率,同時(shí)對無人機(jī)飛行軌跡控制算法的要求過高,在控制率以及控制精度上具有較高的挑戰(zhàn)性。
蘋果是我國北方地區(qū)的主要經(jīng)濟(jì)林作物,僅陜甘寧地區(qū)的種植面積就已超過100萬hm2。本文以自然場景下的山地蘋果園為研究對象,采用RTK-GNSS導(dǎo)航進(jìn)行作業(yè)行間切換引導(dǎo),使用機(jī)器視覺技術(shù)計(jì)算無人機(jī)與作業(yè)行中心線的偏航角,進(jìn)而結(jié)合PID控制算法調(diào)整無人機(jī)作業(yè)航跡,以實(shí)現(xiàn)山地果園無人機(jī)植保作業(yè)航跡的高精度控制。
1 控制系統(tǒng)設(shè)計(jì)
1.1 總體設(shè)計(jì)
基于GNSS與視覺融合的山地果園無人機(jī)植保航跡控制系統(tǒng)主要由無人機(jī)飛行平臺和地面控制站兩部分組成。其中無人機(jī)飛行平臺中,除飛行器外,搭載有GNSS移動(dòng)站、內(nèi)環(huán)飛控模塊、電子羅盤模塊、數(shù)傳模塊、云臺、RGB相機(jī)、無線視頻發(fā)射模塊和電源;地面控制站包括GNSS基站、飛行控制模塊、便攜式計(jì)算機(jī)、無線視頻接收模塊以及視頻采集模塊。其系統(tǒng)整體結(jié)構(gòu)如圖1所示。

圖1 控制系統(tǒng)整體結(jié)構(gòu)圖Fig.1 Overall structure diagram of control system
整個(gè)控制系統(tǒng)是在無人機(jī)內(nèi)環(huán)飛控實(shí)現(xiàn)其自身的穩(wěn)定以及控制其俯仰、偏航、橫滾、升降等動(dòng)作的基礎(chǔ)上運(yùn)行的。GNSS移動(dòng)站同時(shí)接收基站和衛(wèi)星信號,實(shí)時(shí)解算定位信息,并通過數(shù)傳模塊2發(fā)送至地面控制站的飛行控制模塊。飛行控制模塊接收到無人機(jī)定位信息后計(jì)算并發(fā)送相應(yīng)的控制指令給無人機(jī)飛行平臺,實(shí)現(xiàn)無人機(jī)的GNSS導(dǎo)航。RGB相機(jī)采集視頻信息并通過無線視頻發(fā)射模塊實(shí)時(shí)發(fā)送,經(jīng)視頻采集模塊傳輸至便攜式計(jì)算機(jī)。由便攜式計(jì)算機(jī)對圖像進(jìn)行處理以得到作業(yè)果樹行趨勢線及偏航角,將偏航角信息發(fā)送給飛行控制模塊,飛行控制模塊計(jì)算并發(fā)出控制指令實(shí)現(xiàn)無人機(jī)的視覺導(dǎo)航。作業(yè)時(shí)由GNSS導(dǎo)航進(jìn)行果園作業(yè)行間切換,視覺導(dǎo)航進(jìn)行行內(nèi)無人機(jī)航跡控制,從而實(shí)現(xiàn)無人機(jī)山地果園作業(yè)時(shí)的航跡控制。
1.2 無人機(jī)飛行平臺及地面控制站的搭建
本文使用四旋翼飛行器作為載體搭建無人機(jī)飛行平臺。搭建的四旋翼飛行器包括:朗宇X4108s-kv380型電機(jī)、好盈Platinum-30A-Pro OPTO型電子調(diào)速器、1555型碳纖螺旋槳、Tarot 650型機(jī)架、DJI NAZA型內(nèi)環(huán)飛控、FS-R6B型控制信號接收機(jī),對角電機(jī)距離為650 mm。
在無人機(jī)上搭建主要部件,并通過有機(jī)配合,組成無人機(jī)飛行平臺。主要部件是:RGB運(yùn)動(dòng)相機(jī)(HERO3+型,GoPro,美國)、TS351型無線視頻發(fā)射模塊(深圳市創(chuàng)興科電子科技有限公司)、T-2D型兩軸云臺(溫州飛越航模有限公司)、AS62-T20型無線數(shù)傳模塊(成都澤耀科技有限公司)和SCM345型電子羅盤(無錫邁科傳感科技有限公司)。搭建的無人機(jī)飛行平臺實(shí)物如圖2所示。

圖2 無人機(jī)飛行平臺實(shí)物圖Fig.2 Photo of UAV flight platform 1.控制信號接收機(jī) 2.內(nèi)環(huán)飛控 3.數(shù)傳模塊2 4.相機(jī) 5.云臺 6.無線視頻發(fā)射模塊 7.數(shù)傳模塊1 8.電子羅盤 9.GNSS模塊 10.GNSS天線
地面控制站完成飛行平臺定位、航向、視頻等信息的收集,對圖像進(jìn)行處理解算得到偏航角信息,進(jìn)而采用PID控制算法完成無人機(jī)的飛行控制。主要部件有:以STM32F103微處理器為主控制器的飛行控制模塊(內(nèi)嵌PID控制算法),RC305無線視頻接收模塊(深圳市創(chuàng)興科電子科技有限公司),視頻采集模塊為AV信號的USB視頻采集卡,以及便攜式計(jì)算機(jī)(型號G7,處理器i7 8750H,顯卡GTX1060,內(nèi)存16 GB,戴爾)。
其中飛行控制模塊由FS-T6型遙控器(深圳市富斯遙控模型技術(shù)有限公司)改裝完成,模塊由STM32微處理器驅(qū)動(dòng)數(shù)模轉(zhuǎn)換TLC5615芯片產(chǎn)生4路模擬電壓信號,經(jīng)遙控器轉(zhuǎn)換后完成4個(gè)控制通道(偏航、俯仰、橫滾、升降)動(dòng)作的產(chǎn)生,從而實(shí)現(xiàn)對無人機(jī)飛行動(dòng)作的穩(wěn)定控制。搭建完成的地面控制站實(shí)物如圖3所示。
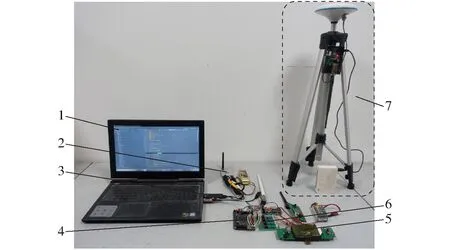
圖3 地面控制站實(shí)物圖Fig.3 Photo of ground control station 1.計(jì)算機(jī) 2.無線視頻接收模塊 3.視頻采集卡 4.STM32微處理器 5.FS-T6型遙控器 6.TLC5615芯片 7.GNSS基站
1.3 RTK-GNSS定位裝置設(shè)計(jì)
為保證定位精度,本系統(tǒng)采用RTK-GNSS裝置進(jìn)行經(jīng)緯度信息獲取,基于瑞士U-blox公司的NEO-M8P-2芯片設(shè)計(jì)該裝置。該芯片可兼容北斗、GPS、Galileo以及GLONASS 4種定位系統(tǒng)信號,并可通過配置成為基站或移動(dòng)站使用。
系統(tǒng)中,配置基站的輸出格式為RTCM3.2,輸出頻率為1 Hz。移動(dòng)站輸出格式為NMEA0183協(xié)議,主要使用經(jīng)緯度信息為無人機(jī)提供定位及導(dǎo)航,其信息輸出頻率為1 Hz。
1.4 控制系統(tǒng)的工作流程
系統(tǒng)作業(yè)前將果樹行起點(diǎn)和終點(diǎn)的經(jīng)緯度坐標(biāo)及作業(yè)航向參數(shù)輸入至控制系統(tǒng)。系統(tǒng)作業(yè)航跡控制過程由GNSS導(dǎo)航和視覺導(dǎo)航控制兩個(gè)階段組成。無人機(jī)從起飛點(diǎn)至作業(yè)行起始點(diǎn)的飛行過程由GNSS導(dǎo)航控制,到達(dá)作業(yè)行起始點(diǎn)后由視覺導(dǎo)航控制無人機(jī)沿果樹行的中線飛行。當(dāng)檢測到作業(yè)行終點(diǎn)時(shí),再由GNSS導(dǎo)航至下一行起點(diǎn),重復(fù)上述工作直至整個(gè)作業(yè)完成。系統(tǒng)控制流程如圖4所示。
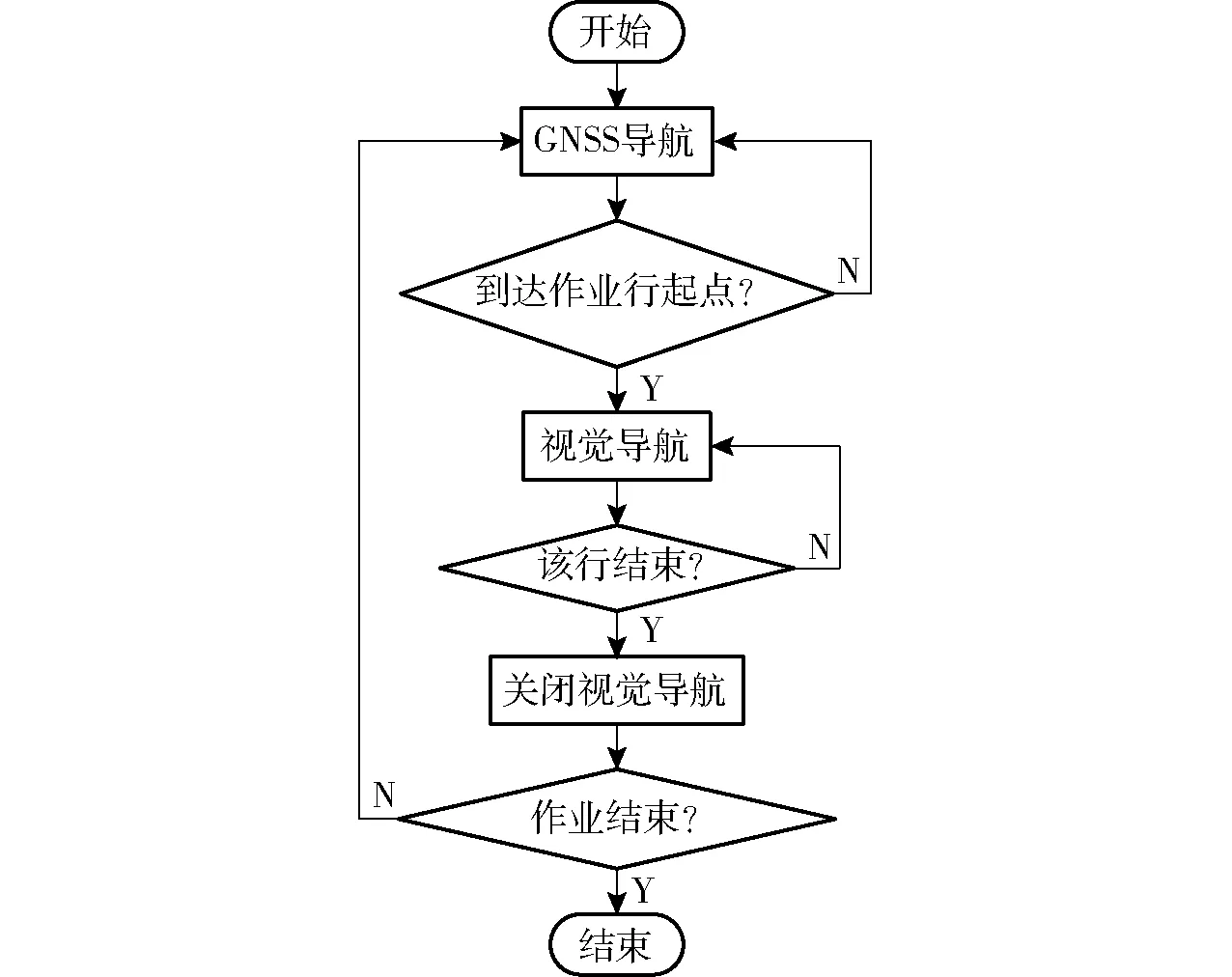
圖4 系統(tǒng)控制流程圖Fig.4 Flow chart of system control
2 主要參數(shù)確定及算法設(shè)計(jì)
2.1 主要參數(shù)確定
2.1.1相機(jī)傾角
當(dāng)無人機(jī)在果樹行上空飛行時(shí),若能實(shí)時(shí)得到當(dāng)前航向與果樹行趨勢線之間的偏航角,即可以控制無人機(jī)按偏航角進(jìn)行轉(zhuǎn)向操作,從而保證無人機(jī)按果樹行的位置飛行。由于在果樹行上空飛行時(shí)相機(jī)視野內(nèi)近距離樹冠面積占比較大,遠(yuǎn)距離果樹行趨勢線更明顯,控制目標(biāo)位置應(yīng)為下一個(gè)控制指令發(fā)出時(shí)所在位置,而圖像邊緣區(qū)域畸變較大。因此,圖像中最遠(yuǎn)距離應(yīng)足夠大,且控制目標(biāo)點(diǎn)不宜距圖像邊緣較近。綜合考慮相機(jī)參數(shù)和飛行參數(shù),選擇圖像垂直寬度的1/4位置作為偏航角的獲取目標(biāo)位置。

圖5 視野及目標(biāo)點(diǎn)示意圖Fig.5 Diagram of visual field and target point
無人機(jī)在果樹行上飛行時(shí)其飛行高度可由內(nèi)環(huán)飛控保持穩(wěn)定,當(dāng)RGB相機(jī)與垂直方向角度一定時(shí),即可得到目標(biāo)位置與無人機(jī)當(dāng)前位置的水平距離。在無人機(jī)飛行時(shí),其視野與目標(biāo)位置間的關(guān)系如圖5所示。圖中,L為無人機(jī)與目標(biāo)果樹的水平相對距離,m。H為無人機(jī)與果樹冠層間的相對高度,m。θ為相機(jī)軸線與重垂線的夾角,(°),即相機(jī)傾角。β為相機(jī)垂直方向的視場角,(°)。h為果樹平均高度,m。P為當(dāng)前相機(jī)在果樹冠層高度上的水平視野寬度,m。
由圖5相機(jī)自身參數(shù)關(guān)系及三角函數(shù)關(guān)系可得
(1)
(2)
為了保證圖5所示的對應(yīng)關(guān)系成立,相機(jī)傾角應(yīng)滿足
(3)
2.1.2相機(jī)視場角
由于GoPro HERO3+相機(jī)的鏡頭帶有超廣角,其視頻畸變比較嚴(yán)重。為了盡可能減小視頻畸變帶來的影響,采用720p下的Medium模式進(jìn)行實(shí)時(shí)拍攝,此時(shí)圖像畸變最小。因無線視頻傳輸模塊會對傳輸?shù)囊曨l進(jìn)行壓縮處理,在Python軟件中實(shí)時(shí)讀取到的圖像會有黑邊,需要基于Python軟件對實(shí)時(shí)讀取的視頻進(jìn)行實(shí)際視場角度計(jì)算。圖6是用相機(jī)獲取的AFT-MCT-OV430型視覺標(biāo)定板(維視數(shù)字圖像技術(shù)有限公司)圖像。根據(jù)該圖像,可求得相機(jī)垂直方向的視場角β=76°,相機(jī)焦距f=8.1 mm,水平方向上圖像的總像素?cái)?shù)D=640像素。
根據(jù)式(3)可得,相機(jī)傾角應(yīng)滿足38°≤θ<52°。
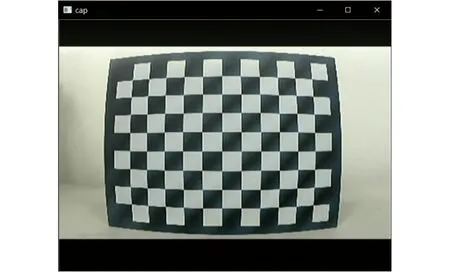
圖6 視覺標(biāo)定板圖像Fig.6 Image of visual calibration board
由于一般植保作業(yè)時(shí)要求無人機(jī)距離果樹冠層的高度為1~3 m[26],為了獲取較好的導(dǎo)航視野及合適的目標(biāo)間距,由式(1)、(2)可得不同飛行高度下相機(jī)傾角θ與無人機(jī)到目標(biāo)果樹的水平相對距離L及相機(jī)在果樹冠層高度上的水平視野寬度P之間的實(shí)際關(guān)系。無人機(jī)的飛行高度越高、相機(jī)的傾角越大,則無人機(jī)與目標(biāo)果樹的水平相對距離L就越大,相機(jī)在果樹冠層高度上的水平視野寬度P也就越大。為了使L適合無人機(jī)轉(zhuǎn)向的控制周期,且保證無人機(jī)在視覺導(dǎo)航時(shí)視野中的果樹冠層面積所占比例較大,最終選擇飛行高度為2 m,相機(jī)傾角為46°。此時(shí),L=1.0 m,P=18.7 m。
2.2 主要算法設(shè)計(jì)
2.2.1GNSS導(dǎo)航方法

圖7 果樹行提取結(jié)果Fig.7 Results of tree row extraction
GNSS導(dǎo)航控制中,GNSS基準(zhǔn)站通過數(shù)傳模塊1將定位基準(zhǔn)信息發(fā)送至機(jī)載GNSS模塊。機(jī)載模塊解算獲得無人機(jī)定位信息,通過電子羅盤模塊讀取實(shí)時(shí)航向信息,并將位置信息和航向信息通過機(jī)載數(shù)傳模塊2發(fā)送至地面飛控模塊。地面飛控模塊將之與果樹行作業(yè)起點(diǎn)位置進(jìn)行比較,將比較結(jié)果作為PID控制算法的輸入,計(jì)算得到速度、航向等控制量,實(shí)現(xiàn)無人機(jī)的實(shí)時(shí)控制。重復(fù)上述控制過程,直至無人機(jī)飛行至作業(yè)果樹行起點(diǎn)位置后,調(diào)整無人機(jī)作業(yè)航向并切換至視覺導(dǎo)航控制。
2.2.2視覺導(dǎo)航方法
2.2.2.1作業(yè)行提取方法
遙控?zé)o人機(jī)在山地蘋果園上方飛行,使用GoPro HERO3+相機(jī)實(shí)時(shí)獲取視頻信息,并以PAL格式由無線視頻傳輸模塊上傳到計(jì)算機(jī)端實(shí)時(shí)存儲為圖像,由于實(shí)時(shí)拍攝時(shí)連續(xù)幀圖像間的區(qū)別不大,故計(jì)算機(jī)以jpg格式每秒存儲一幀圖像。由于視頻采集卡轉(zhuǎn)換的限制,最終存儲的圖像分辨率為640像素×480像素,實(shí)測圖像實(shí)時(shí)傳輸延時(shí)約為200 ms。無人機(jī)飛行時(shí),無人機(jī)距樹冠高度約2 m,相機(jī)傾角為46°,鏡頭垂直方向中線與航向保持一致。從獲取的圖像中隨機(jī)選取600幅用于果樹行提取算法中參數(shù)的確定。圖7a是任意選取的3幅圖像。
通常在RGB顏色空間上使用過綠特征(2G-R-B)[27-28]對綠色果樹目標(biāo)進(jìn)行識別,其中R、G、B為視頻圖像中紅、綠、藍(lán)顏色的分量。圖7a的過綠特征提取結(jié)果如圖7b所示。由于無人機(jī)拍攝到的圖像為高空俯視圖像,圖像中不僅有果樹,還有地表雜草、非作業(yè)果樹行等干擾,使得基于過綠特征二值化后的圖像存在較多的粘連區(qū)域,導(dǎo)致果樹行的分割效果差,無法滿足航跡控制要求。
有研究表明,最優(yōu)線性組合識別方法可對視頻進(jìn)行快速處理[29-30],因此,本文基于線性組合方法進(jìn)行果樹行提取,該線性組合式為
y=aR+bG+cB
(4)
式中a——R分量系數(shù)b——G分量系數(shù)
c——B分量系數(shù)
y——線性組合的結(jié)果
為獲取果樹行信息,需要將y映射至0~255范圍內(nèi),處理為灰度圖后以127為閾值進(jìn)行二值化處理。將果樹行區(qū)域設(shè)置為白色,其他區(qū)域設(shè)置為黑色。其映射關(guān)系式為
(5)
式中y*——圖像映射結(jié)果
ymin——線性組合處理結(jié)果的最小值
ymax——線性組合處理結(jié)果的最大值
在參數(shù)選取試驗(yàn)中,發(fā)現(xiàn)B分量對果樹目標(biāo)行的識別效果影響不大。為了減小程序運(yùn)算量,確定B分量系數(shù)c=0。通過對600幅圖像的R和G分量進(jìn)行分析,確定最佳參數(shù)為a=1.95,b=2.00。圖7a進(jìn)行最優(yōu)線性組合識別后處理結(jié)果如圖7c所示。圖中,白色部分為識別后的果樹區(qū)域。可見圖中存在多行果樹,雖然仍有部分區(qū)域存在粘連現(xiàn)象,但從圖7c可以看出,水平方向中心線附近的待作業(yè)果樹行分割效果較好,果樹行趨勢明顯。
以上果樹行識別算法是基于Python3.5平臺,利用OpenCV庫和NumPy庫文件編程實(shí)現(xiàn)的,其算法流程如圖8所示。
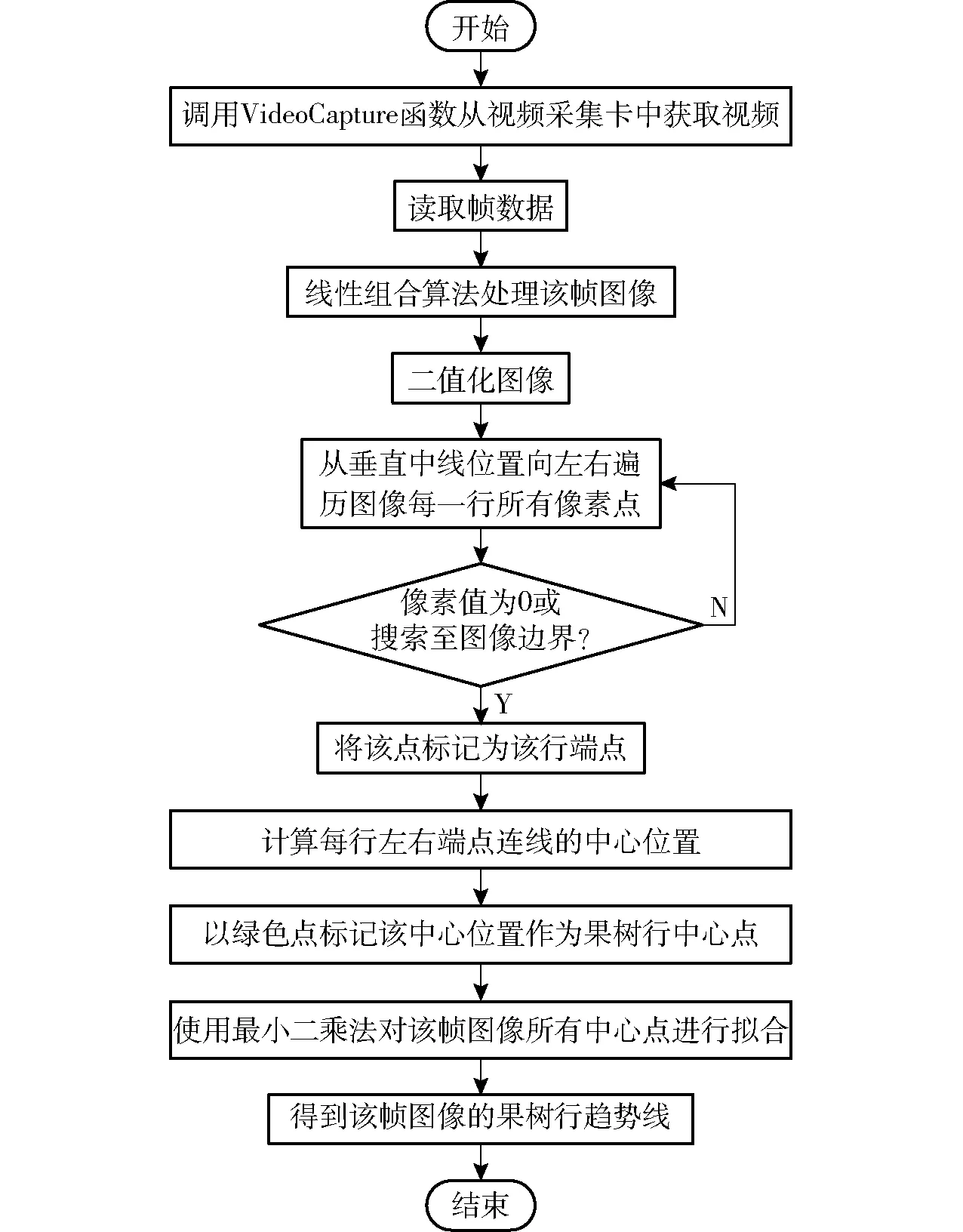
圖8 果樹行提取算法Fig.8 Flow chart of fruit tree row extraction algorithm
視覺導(dǎo)航時(shí),無人機(jī)已由GNSS導(dǎo)航引導(dǎo)至待作業(yè)果樹行正上方且航向已調(diào)整至作業(yè)方向,默認(rèn)圖像中心區(qū)域?yàn)榇鳂I(yè)行。為了提取當(dāng)前作業(yè)行,以圖像垂直中線為起始位置,分別向左右像素位置進(jìn)行遍歷,直到遇見黑色的果樹行邊緣或者圖像邊界位置時(shí)終止,然后將每像素行左右識別到的端點(diǎn)取其中心位置作為該像素行的果樹中心位置,其結(jié)果如圖7d中綠色點(diǎn)所示。獲取中心位置后,為了獲取與實(shí)際果樹行趨勢線一致的擬合線,采用最小二乘法對圖像上所有綠色點(diǎn)進(jìn)行擬合得到表示實(shí)際的果樹行的趨勢線,其結(jié)果如圖7d中藍(lán)色曲線所示。從圖中可以看出,在距無人機(jī)較近區(qū)域擬合得到的趨勢線與實(shí)際果樹行趨勢線基本一致。
2.2.2.2偏航角獲取算法設(shè)計(jì)
為了從圖像中獲得當(dāng)前的偏航角信息,以圖像1/4處水平線與擬合線的交點(diǎn)為當(dāng)前目標(biāo)點(diǎn),即可保證目標(biāo)點(diǎn)實(shí)際位置與無人機(jī)距離較近,且選取位置的圖像中果樹區(qū)域占比較大。通過將目標(biāo)點(diǎn)像素坐標(biāo)與垂直中線像素坐標(biāo)作差,即可獲得目標(biāo)點(diǎn)距離中線的像素差。
設(shè)圖像目標(biāo)點(diǎn)的像素位置與垂直中線的像素差為d,根據(jù)相機(jī)關(guān)系可得
(6)
式中X——相機(jī)成像傳感器水平方向長度,mm
δ——無人機(jī)偏航角,(°)
參數(shù)X由相機(jī)傳感器尺寸決定,本文使用相機(jī)X=8.83 mm。
當(dāng)目標(biāo)點(diǎn)在中線左邊時(shí),此時(shí)像素差為負(fù)值,無人機(jī)需要左轉(zhuǎn)δ;相反當(dāng)目標(biāo)點(diǎn)在中線右邊時(shí),此時(shí)像素差為正值,無人機(jī)需要右轉(zhuǎn)δ。
將圖7d中目標(biāo)點(diǎn)距離中線的像素差代入式(6),即可得到無人機(jī)的偏航角。
2.2.2.3視覺導(dǎo)航的控制流程
視覺導(dǎo)航控制中,由云臺搭載RGB相機(jī)以確保無人機(jī)飛行時(shí)圖像中心線與航向保持一致,以及RGB相機(jī)傾角固定不變。RGB相機(jī)拍攝視頻并通過無線視頻傳輸模塊傳送至地面接收模塊。接收模塊將接收到的視頻信息經(jīng)視頻采集模塊傳輸至便攜式計(jì)算機(jī)中,運(yùn)用圖像處理算法將接收到的圖像進(jìn)行分割得到作業(yè)行區(qū)域,在圖像中求取各像素行中作業(yè)行區(qū)域的中點(diǎn)坐標(biāo)并擬合得到果樹行趨勢線,該曲線為作業(yè)行分布趨勢。將作業(yè)行趨勢線與圖像中線比較計(jì)算無人機(jī)偏航角,并將偏航角傳送給地面飛行控制模塊。飛控模塊采用PID控制算法計(jì)算得到偏航控制量,實(shí)現(xiàn)對無人機(jī)作業(yè)中航向的調(diào)整。重復(fù)該過程直到檢測到該作業(yè)行結(jié)束后切換至GNSS導(dǎo)航控制。
3 控制系統(tǒng)性能測試與驗(yàn)證
3.1 GNSS裝置定位精度測量
在對GNSS裝置的定位精度進(jìn)行測量時(shí),將移動(dòng)站天線放置在距離地面1 m的水平紙板上,記錄其初始位置的經(jīng)緯度數(shù)據(jù)。然后將該點(diǎn)作為原點(diǎn),依次移動(dòng)天線位置使其距離原點(diǎn)位置為3、5、10、20 cm,記錄天線分別位于原點(diǎn)上、下、左、右4個(gè)方向不同位置的經(jīng)緯度數(shù)據(jù),每個(gè)位置記錄10個(gè)數(shù)據(jù)。根據(jù)測量得到的經(jīng)緯度數(shù)據(jù)和實(shí)際的距離,計(jì)算GNSS裝置的定位誤差,結(jié)果如表1所示。
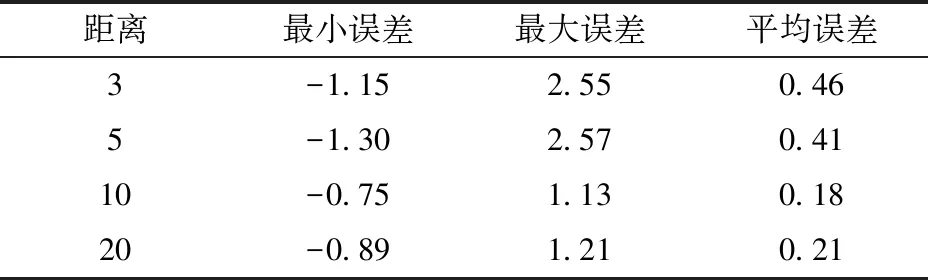
表1 GNSS的定位誤差Tab.1 Position errors of GNSS cm
由定位測試誤差可知,3 cm和5 cm間距時(shí)誤差基本一致,最大為2.57 cm。在10 cm和20 cm間距時(shí),誤差明顯減小,最大為1.21 cm。表明裝置定位精度為厘米級,可滿足無人機(jī)GNSS導(dǎo)航時(shí)精確定位的需求。
3.2 圖像處理速度測試
植保無人機(jī)的飛行速度一般小于3 m/s,本文選取飛行速度為2 m/s。使用本文提出的偏航角計(jì)算方法對視頻進(jìn)行處理,統(tǒng)計(jì)連續(xù)600幅圖像的處理速度,其中處理速度最快為15.05 f/s,最慢為2.35 f/s,平均處理速度為6.53 f/s,且70%以上處理速度都集中于3~5 f/s之間。因此,視覺導(dǎo)航控制率確定為2次/s,可確保每次控制都可完成偏航角的計(jì)算,從而保證航跡控制的準(zhǔn)確性。
3.3 導(dǎo)航控制性能測試
試驗(yàn)地點(diǎn)位于甘肅省平?jīng)鍪徐o寧縣山地蘋果園(35.16°N、105.77°E、海拔1 608 m)。該地區(qū)果園的地形為臺階狀,果樹沿等高線單行種植。以該地區(qū)任意3塊不同形狀、不同高度差的蘋果園為對象,對本文提出的GNSS與視覺融合導(dǎo)航試驗(yàn)方法進(jìn)行驗(yàn)證。試驗(yàn)時(shí)間為2018年10月4—6日10:00—14:00。天氣晴,光照充足,陣風(fēng),無固定風(fēng)速風(fēng)向。
為了獲取各試驗(yàn)地點(diǎn)三維地形模型,使用大疆Phantom 3 Standard型無人機(jī)對果園進(jìn)行航拍獲取影像,并基于Agisoft PhotoScan軟件(Agisoft,俄羅斯)進(jìn)行三維地形建模,最終獲取高分辨率的正射影像。將正射影像導(dǎo)入ArcGIS軟件(Esri,美國),獲取每個(gè)作業(yè)行起點(diǎn)的經(jīng)緯度及航向角度,將作業(yè)行起點(diǎn)的信息預(yù)先導(dǎo)入控制系統(tǒng),并用GNSS系統(tǒng)實(shí)時(shí)記錄無人機(jī)的位置信息,作為飛行軌跡。
圖9a為其中一塊山地蘋果園的俯視圖。該圖中共有3行果樹。無人機(jī)飛行時(shí),以右上角為飛行起點(diǎn),左下角為終止點(diǎn)。從右上角到左下角共有48棵果樹。圖中綠色點(diǎn)為手動(dòng)標(biāo)注的果樹冠層中心點(diǎn),用于對導(dǎo)航路徑誤差的計(jì)算。獲取ArcGIS軟件中冠層中心點(diǎn)的經(jīng)緯度信息,計(jì)算冠層中心點(diǎn)到導(dǎo)航路徑的投影距離,即導(dǎo)航時(shí)無人機(jī)偏離果樹的誤差。定義航向右側(cè)誤差為正,左側(cè)誤差為負(fù)。則遍歷48棵果樹時(shí)的導(dǎo)航誤差如圖9b所示。
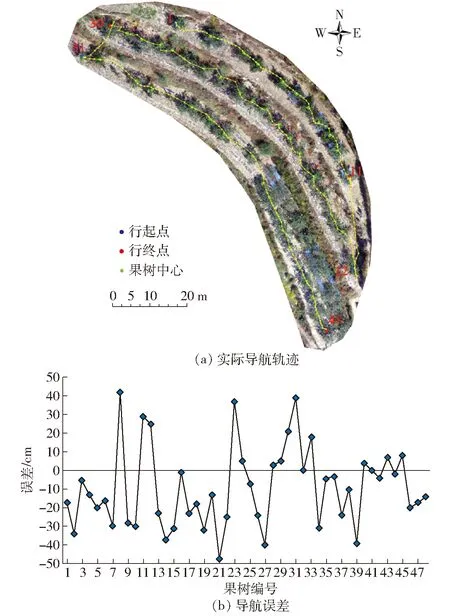
圖9 導(dǎo)航試驗(yàn)結(jié)果Fig.9 Results of navigation test
由圖9a可以看出,除個(gè)別點(diǎn)外,無人機(jī)飛行軌跡較平穩(wěn)。飛行中的誤差絕對值最大處發(fā)生在第2行的果樹上。其原因可能是由于第2行果樹冠層茂密,覆蓋率高,提取果樹行時(shí)近場位置所占區(qū)域過大,計(jì)算輸出偏航角過大,導(dǎo)致出現(xiàn)過控制;也可能是由于飛行過程中側(cè)風(fēng)對無人機(jī)的影響導(dǎo)致。通過對3塊果園的導(dǎo)航誤差進(jìn)行統(tǒng)計(jì),得出基于本文提出的GNSS與視覺融合的山地果園無人機(jī)航跡控制系統(tǒng)的誤差范圍為-47~42 cm,平均誤差為-9 cm。由于蘋果樹的冠層直徑為300 cm左右,因此,本文提出的航跡控制系統(tǒng)和方法的精度較好,能夠滿足無人機(jī)果樹植保作業(yè)的要求。
4 結(jié)論
(1)設(shè)計(jì)了GNSS與視覺融合的山地果園無人機(jī)航跡控制系統(tǒng),該系統(tǒng)由無人機(jī)飛行平臺和地面控制站兩部分組成。該無人機(jī)飛行平臺以四旋翼無人機(jī)為載體,整個(gè)平臺飛行穩(wěn)定,控制性能良好。設(shè)計(jì)并搭建了以NEO-M8P-2芯片為核心的RTK-GNSS定位裝置,試驗(yàn)結(jié)果表明,定位精度為厘米級,定位精度高。
(2)設(shè)計(jì)了視覺導(dǎo)航時(shí)偏航角獲取算法。采用線性組合方法提取果樹行信息,基于最小二乘法對果樹行進(jìn)行擬合,得到果樹行趨勢線,并通過果樹趨勢線獲取了視覺導(dǎo)航偏航角。
(3)山地蘋果園實(shí)地試驗(yàn)表明,設(shè)計(jì)的航跡控制系統(tǒng)可完成作業(yè)行間的GNSS導(dǎo)航控制及作業(yè)行中的視覺導(dǎo)航控制。在自然條件下,航跡控制系統(tǒng)的誤差范圍為-47~42 cm,平均誤差為-9 cm。系統(tǒng)控制精度較高,可滿足無人機(jī)山地果園植保作業(yè)時(shí)精準(zhǔn)控制要求。
猜你喜歡
小主人報(bào)(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
