北斗中長基線三頻模糊度解算的自適應抗差濾波算法
2019-04-11 02:30:36高揚駿呂志偉周朋進賈錚洋張倫東叢佃偉
測繪學報 2019年3期
高揚駿,呂志偉,周朋進,賈錚洋,張倫東,叢佃偉
信息工程大學地理空間信息學院,河南 鄭州 450001
在中長基線GNSS相對定位中,如何正確固定模糊度是眾多相關領域學者研究的熱點問題。我國北斗衛星導航系統BDS(BeiDou navigation satellite system)于2012年底正式提供服務以來,運行穩定[1]。目前北斗系統已進入全球組網新階段,其在軌衛星均可播發三頻信號,可為地面用戶提供更多的組合觀測量,有助于正確固定模糊度。
經典TCAR算法將原始觀測量進行線性組合,經逐級取整固定模糊度參數,但當基線長度達到十幾千米甚至幾百千米以上時,受電離層延遲和測量噪聲的影響,模糊度難以正確固定。因此,如何有效地減小電離層延遲以及測量噪聲對模糊度固定的不利影響,是正確固定模糊度需要著重解決的問題。
文獻[2]通過構建最優觀測量,分3步固定模糊度。文獻[3]將經典TCAR模型擴展為幾何模型和無幾何模型兩類。文獻[4]通過兩個GF和IF組合觀測量僅對第3個線性無關的組合觀測量進行了研究分析。文獻[5]證明基于三頻的BDS單歷元模糊度解算方法相對于基于雙頻的模糊度解算方法,模糊度固定正確率有大幅提高。文獻[6]對LAMBDA方法、幾何TCAR算法、無幾何TCAR算法及無幾何無電離層TCAR算法進行了實測數據的對比分析。文獻[7—8]提出的新算法分別降低了運算量和縮短了窄巷組合的收斂時間,但模糊度固定正確率與傳統方法相當。文獻[9—10]提出的方法提高了浮點解的精度,但未對固定解作研究分析。文獻[11—13]提出的算法提高了中短基線模糊度固定正確率,但對算法在中長基線下的效果未作研究分析。文獻[14]提出一種削弱電離層延遲影響的改進TCAR算法,但對窄巷模糊度固定正確率提高有限。文獻[15]利用Kalman濾波對BDS多頻數據進行處理。文獻[16]提出的自適應抗差濾波理論適用于動態導航定位,對于中長基線相對定位具有一定的應用價值。
針對TCAR算法在BDS中長基線下模糊度固定正確率不高的問題,對BDS三頻相對定位的解算模型進行了研究并改進。提出一種能減小電離層延遲影響,具有良好自適應抗差特性的BDS改進TCAR算法。在無幾何TCAR模型的基礎上,通過對模糊度固定的超寬巷進行線性組合得到電離層延遲和寬巷模糊度,再通過構造最優觀測量,用自適應抗差濾波求解窄巷模糊度,有效地提高了寬窄巷模糊度的固定正確率。
1 經典TCAR算法
1.1 基本觀測量
BDS采用雙差觀測量實現中長基線相對定位,雙差偽距和載波相位觀測方程表達式為[2]
(1)

(2)

三頻雙差組合觀測量表達式為
(3)
(4)
式中,i、j、k分別為對應頻點f1、f2、f3的組合整數系數。
1.2 計算步驟
經典TCAR算法通過對原始偽距和載波相位觀測量進行線性組合,可得到最優觀測量。按波長由長到短,依次固定超寬巷、寬巷和窄巷模糊度。BDS常用最優載波相位組合觀測量見表1。其中,整數i、j、k分別表示組合觀測量的組合系數;λ(i,j,k)表示相應的組合波長;μ(i,j,k)表示以m為單位的觀測噪聲放大因子;β(i,j,k)為組合觀測量一階電離層延遲系數。
基于無幾何模型的TCAR算法分3步對模糊度浮點解進行取整固定。通過對偽距觀測量和載波觀測量進行線性組合,以消除站星幾何距離、對流層延遲及衛星軌道誤差等幾何相關項。具體步驟如下:
(1) 超寬巷模糊度解算
(5)
式中,int[·]表示取整算子。
(2) 寬巷模糊度解算
(6)
(3) 窄巷模糊度解算
(7)
式中
(8)
(9)
根據線性關系,可得到其他原始頻點的模糊度
(10)
(11)
2 改進TCAR算法
2.1 超寬巷模糊度解算
電離層延遲是限制中長基線下基于無幾何模型的TCAR算法模糊度固定正確率的重要因素。利用兩個易于正確固定的超寬巷模糊度求解電離層延遲。根據電離層延遲的大小,調整下述第2步中自適應權因子的大小,固定寬巷模糊度。具體過程如下:
基于無幾何模型固定兩個超寬巷模糊度分別為[19]
(12)
(13)
根據得到的超寬巷組合觀測量求解電離層延遲及對應精度為
(14)
2.2 寬巷模糊度解算
構造最優組合觀測量求解寬巷模糊度為
(15)
式中,實數b1、b2、b3及a1為組合觀測量的權因子,應滿足以下約束條件
(16)
式(16)中組合系數應滿足3個條件:無幾何條件、無電離層或削弱電離層,以及最小方差條件。為避免將未模型化的誤差(如對流層延遲誤差、軌道誤差等)放大,使幾何相關項對應系數之和為1,在消除電離層延遲的情況下得到組合噪聲最小的觀測量,分別得到約束條件式(16)包含的3個等式。式中,根據經驗值,取σφ=0.004 m,σP=0.6 m,αk為自適應權因子,αk取值滿足以下函數[14]
(17)

(18)
2.3 窄巷模糊度解算
由于窄巷觀測量波長相對較短,窄巷模糊度對電離層延遲、測量噪聲等影響更為敏感,因此窄巷模糊度固定更為困難,而提高窄巷模糊度固定的正確率是提高最終定位精度的關鍵。模糊度已固定的寬巷可看作是精度優于超寬巷的偽距觀測量,可用于窄巷模糊度解算[17]。因此,為了提高窄巷模糊度固定正確率,通過構建最優觀測量的方式來降低電離層殘差和觀測噪聲對窄巷模糊度解算造成的不利影響[18]。
將模糊度已固定的超寬巷、寬巷與原始偽距觀測量及窄巷觀測量經過線性組合,并賦予最優的權重比,得到消電離層、低噪聲的最優觀測量,用于窄巷模糊度的解算,以提高窄巷模糊度解算的正確率。構建的觀測量表達式如下
(19)
式中,組合系數hi和ki(i=1,2,3)的選取條件應滿足下式所述關系
h1+h2+h3+k1+k2+k3=1
(20)
h1β(1,0,0)+h2β(0,-1,1)+h3β(1,-1,0)+k1β(1,0,0)+k2β(0,1,0)+k3β(0,0,1)=0
(21)
(22)
為避免將未模型化的誤差(如對流層延遲誤差、軌道誤差等)放大,使幾何相關項對應系數之和為1,得到約束條件式(20);在消除電離層延遲的情況下得到組合噪聲最小的觀測量,分別得到約束條件式(21)和式(22)。對式(22)求極值可得最小噪聲,由式(20)、式(21)、式(22)確定的約束關系存在唯一解。

表2 最優組合系數
由表2可得,因偽距P1和P2的噪聲遠大于載波噪聲,因此賦予k1和k2較小權值。下面用自適應抗差濾波求解窄巷模糊度,過程如下:
(1) 基本模型
窄巷模糊度解算采用優化后的觀測量,其載波雙差觀測方程如下
(23)
式中,a為流動站位置坐標參數(Xr,Yr,Zr);B為基線位置向量a的設計矩陣;b1為雙差窄巷模糊度在頻點f1上的模糊度參數;v1、vLC1、vLC2表示對應觀測量的殘差向量;l1、lLC1、lLC2表示對應觀測量;wLC1和wLC2分別對應h1不同的取值。求解窄巷模糊度浮點解后經直接取整固定獲得窄巷模糊度整數解,以保持窄巷模糊度整數特性。
利用自適應抗差濾波解算位置坐標參數及窄巷模糊度,目的是抵制觀測異常誤差的影響,構造自適應因子可控制動力學模型誤差的影響[19]。其中狀態向量為單歷元內位置坐標參數及窄巷模糊度,即

(24)

(2) 等價權計算
(25)

(26)
式中,k0=1.25;k1=3.75。
(3) 誤差判別統計量
采用的誤差判別統計量為預測殘差統計量
(27)

(4) 自適應因子
自適應因子仍采用IGG3方案。即當模型誤差統計量小于閾值時,αk等于1;當模型誤差大于閾值時,αk等于0;否則,αk大于0,小于1。函數形式為
(28)
式中,c0=1.25;c1=3.75。
改進TCAR算法總體流程如圖1所示。
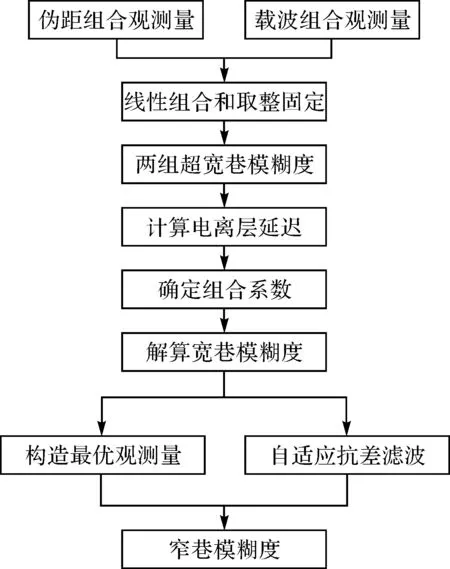
圖1 改進TCAR算法流程Fig.1 Flowchart of improved TCAR algorithm
3 試驗分析
為驗證改進TCAR算法的可行性和效果,利用多頻接收機采集了共3組不同長度的觀測數據。所采集數據信息見表3。
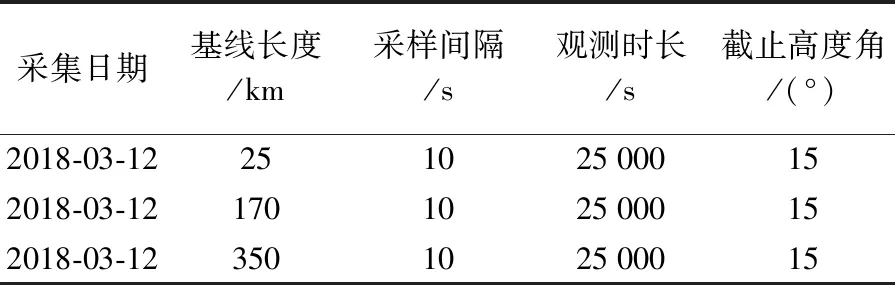
表3 采集數據信息
25 km長基線為滎陽—鄭州的基線;170 km長基線為平頂山—鄭州的基線;350 km長基線為隨州—鄭州的基線。
利用所采集的3組不同長度基線數據分別對改進TCAR算法進行試驗驗證。試驗采用后處理精密相對定位得到的模糊度固定解作為真值,將每個歷元解算得到的模糊度固定解與真值對比,以判斷模糊度是否正確固定。圖例中以MTCAR表示改進TCAR算法。
圖2是分別利用經典TCAR算法和改進TCAR算法解算25 km基線時,選取的C01—C10雙差衛星相應的寬巷模糊度估值誤差。圖3是對應的窄巷模糊度估值誤差。
(1) 25 km基線數據處理結果
由圖2和圖3可以看出,當基線長度為25 km時,采用經典TCAR算法解算模糊度時,寬巷模糊度估值誤差可達0.2~0.4周,窄巷模糊度估值誤差浮動較大,可達2~5周,窄巷模糊度無法直接取整固定;采用改進TCAR算法解算模糊度時,寬巷模糊度估值誤差基本保持在0.1周左右,小于0.2周,窄巷模糊度估值誤差基本小于0.4周,可以直接取整固定。
(2) 170 km基線數據處理結果
圖4是分別利用經典TCAR算法和改進TCAR算法解算170 km基線時,選取的C01—C10雙差衛星相應的寬巷模糊度估值誤差。圖5是相應的窄巷模糊度估值誤差。
由圖4和圖5可以看出,當基線長度為170 km時,采用經典TCAR算法解算模糊度時,寬巷模糊度估值誤差可達到0.2~0.4周,窄巷模糊度估值誤差浮動較大,可達到2~5周,窄巷模糊度無法直接取整固定;采用改進TCAR算法解算模糊度時,寬巷模糊度估值誤差基本小于0.2周,窄巷模糊度估值誤差基本小于0.6周。
(3) 350 km基線數據處理結果
圖6是分別利用經典TCAR算法和改進TCAR算法解算350 km基線時,選取的C01—C06雙差衛星相應的寬巷模糊度估值誤差。圖7是相應的窄巷模糊度估值誤差。
由圖6和圖7可以看出,當基線長度為350 km時,采用經典TCAR算法解算模糊度時,寬巷模糊度估值誤差可達到0.2~0.4周,窄巷模糊度估值誤差浮動較大,可達到5~10周,窄巷模糊度無法直接取整固定;采用改進TCAR算法解算模糊度時,寬巷模糊度估值誤差基本小于0.2周,窄巷模糊度估值誤差小于1周。
對試驗結果進行統計,得到上述3種不同長度基線的模糊度固定正確率,統計結果見表4—表6。模糊度固定正確率指模糊度固定正確歷元數與總歷元數的百分比。
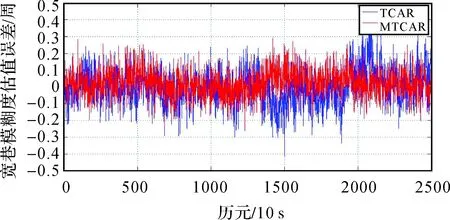
圖2 寬巷模糊度估值誤差(25 km,C01—C10)Fig.2 Wide-lane ambiguity estimation error(25 km,C01—C10)
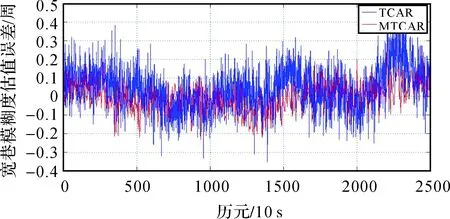
圖4 寬巷模糊度估值誤差(170 km,C01—C10)Fig.4 Wide-lane ambiguity estimation error(170 km,C01—C10)

圖5 窄巷模糊度估值誤差(170 km,C01—C10)Fig.5 Narrow-lane ambiguity estimation error(170 km,C01—C10)
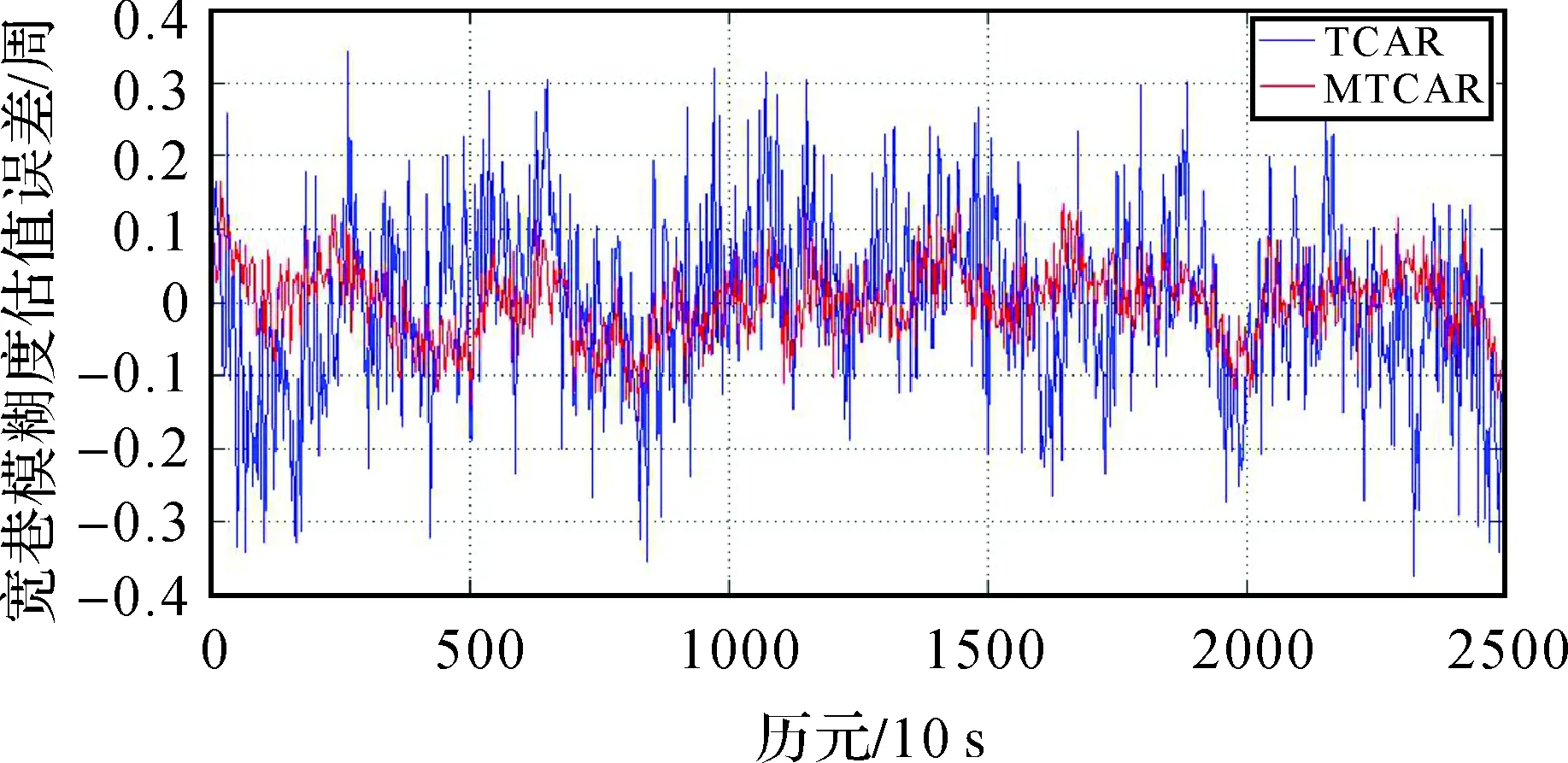
圖6 寬巷模糊度估值誤差(350 km,C01—C06)Fig.6 Wide-lane ambiguity estimation error(350 km,C01—C06)
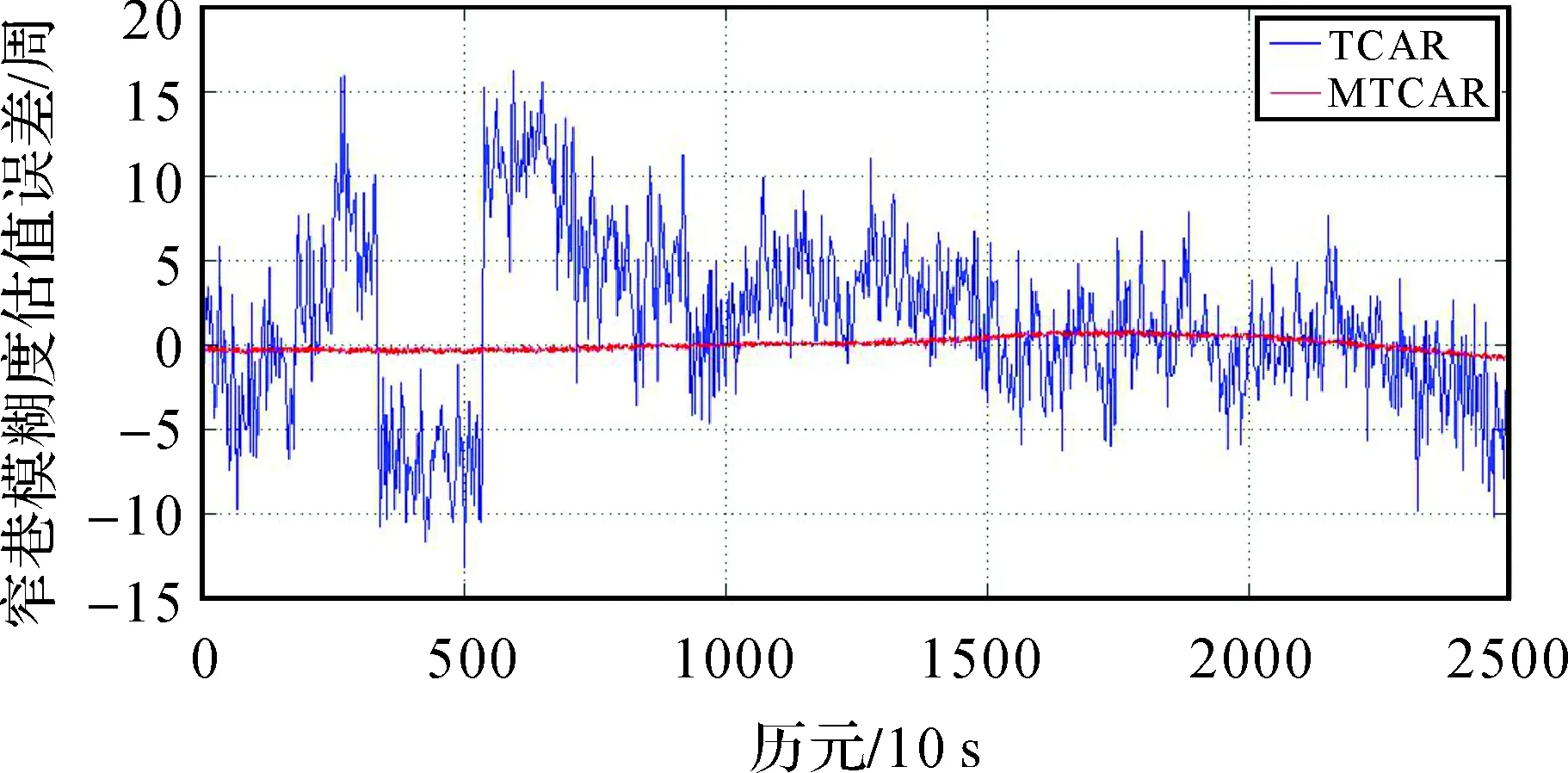
圖7 窄巷模糊度估值誤差(350 km,C01—C06)Fig.7 Narrow-lane ambiguity estimation error(350 km,C01—C06)
Tab.4Ambiguityfixedcorrectratestatisticalresult(25 km,C01—C10)
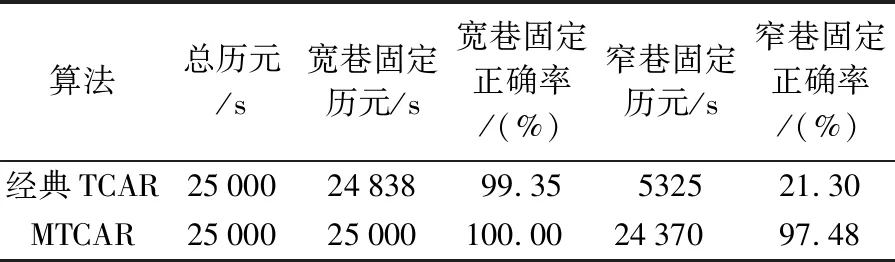
算法總歷元/s寬巷固定歷元/s寬巷固定正確率/(%)窄巷固定歷元/s窄巷固定正確率/(%)經典TCAR250002483899.35532521.30MTCAR2500025000100.002437097.48
表5模糊度固定正確率統計結果(170 km,C01—C10)
Tab.5Ambiguityfixedcorrectratestatisticalresult(170 km,C01—C10)
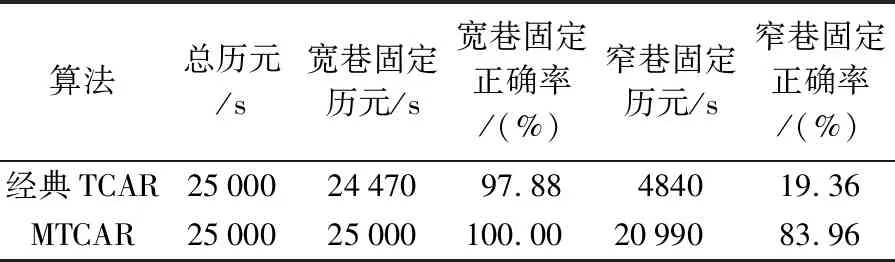
算法總歷元/s寬巷固定歷元/s寬巷固定正確率/(%)窄巷固定歷元/s窄巷固定正確率/(%)經典TCAR250002447097.88484019.36MTCAR2500025000100.002099083.96
表6模糊度固定正確率統計結果(350 km,C01—C06)
Tab.6Ambiguityfixedcorrectratestatisticalresult(350 km,C01—C06)
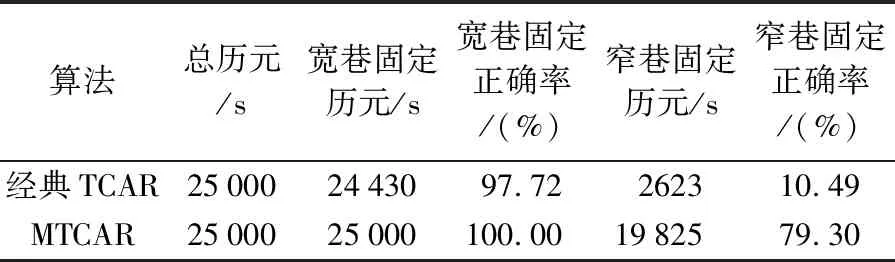
算法總歷元/s寬巷固定歷元/s寬巷固定正確率/(%)窄巷固定歷元/s窄巷固定正確率/(%)經典TCAR250002443097.72262310.49MTCAR2500025000100.001982579.30
本文利用經典TCAR算法解算長度為25 km基線時,寬巷的模糊度固定正確率統計結果是97.72%,窄巷的模糊度固定正確率統計結果是21.3%;文獻[11]利用經典TCAR算法解算長度為23 km基線,寬巷模糊度固定率為98.39%,窄巷模糊度固定率為88.17%。本文試驗結果與文獻[11]相比,寬巷的模糊度固定正確率基本持平,窄巷的模糊度固定正確率偏低。原因如下:①可能是受觀測條件的影響,觀測數據中包含較多的測量噪聲及測量粗差;②即使是等長度的基線,空間相關程度也可能并不相同,本試驗采集的數據可能基線間空間相關性較差,雙差難以較好消除公共誤差項,以上兩點導致利用經典TCAR算法解算窄巷模糊度時固定正確率較低。而使用改進的TCAR算法可使窄巷模糊度固定正確率達到83.96%,改進的TCAR算法采用自適應抗差濾波求解窄巷模糊度,因此也可以說明改進的TCAR算法較好地減小測量噪聲以及粗差帶來的影響。
總體上,隨著基線長度不斷增加,寬巷和窄巷的模糊度固定正確率均會下降。對于寬巷模糊度,當基線長度為25 km,采用經典TCAR算法時,模糊度固定正確率保持在99.35%,即使基線長度達到350 km,模糊度固定正確率也高達97.72%;采用改進TCAR算法時,模糊度固定正確率均為100%。針對長度分別為25、170、350 km的基線,采用改進TCAR算法相比于經典TCAR算法,寬巷模糊度固定正確率分別提高了0.65%、2.12%、2.28%。
對于窄巷模糊度,當基線長度為25 km,采用經典TCAR算法時,模糊度固定正確率為21.30%,當基線長度達到350 km,模糊度固定正確率僅為10.49%;當基線長度為25 km,采用改進TCAR算法時,模糊度固定正確率高達97.48%,當基線長度達到350 km,模糊度固定正確率為79.30%;針對長度分別為25、170、350 km的基線,采用改進TCAR算法相比于經典TCAR算法,窄巷模糊度固定正確率分別提高了76.18%、64.60%、68.81%。
因多基線數據處理的基礎也是單基線處理,對于多基線處理,本文的算法也同樣適用于多基線解算,即本文的結論也同樣適用。且多基線處理,還可以利用組網由網平差進一步提高基線解算精度。
試驗表明,隨著基線長度的不斷增加,相比于經典TCAR算法,改進TCAR算法能夠保持較高的寬巷模糊度固定正確率,且能明顯提高窄巷模糊度固定正確率。
4 結 論
中長基線下模糊度難以正確固定是經典TCAR算法的不足之處。基于自適應抗差濾波的BDS改進TCAR算法在減小電離層延遲的基礎上求解寬巷模糊度,在構建最優觀測量后,采用自適應抗差濾波求解窄巷模糊度,以提高模糊度固定成功率和可靠性。試驗表明,中長基線下窄巷模糊度更難以固定,提出的改進算法仍能保持較高的寬巷模糊度固定正確率,并能明顯提高窄巷模糊度固定正確率。