星間單程偽距聯合監測站數據確定北斗三號衛星軌道和鐘差
2019-04-11 02:30:24阮仁桂魏子卿賈小林
測繪學報 2019年3期
阮仁桂,魏子卿,賈小林
1. 西安測繪研究所,陜西 西安 710054; 2. 地理信息工程國家重點實驗室,陜西 西安 710054; 3. 信息工程大學,河南 鄭州 450052
基于星間鏈路,導航衛星星座可以實現自主導航,在地面站設施受損的情況下繼續提供服務。對于北斗衛星導航系統而言,星間鏈路的首要功能是確保系統在區域監測站條件下實現設計的定軌和時間同步指標。2015年以來,北斗三號系統(BDS-3)陸續發射了5顆試驗衛星[1],2017年11月至今已經陸續發射了18顆北斗工作衛星,這些衛星都搭載了星間鏈路設備。國內外許多學者開展了利用星間鏈路觀測數據進行星座自主導航或聯合地面錨固站或監測站觀測數據進行定軌和時間同步的仿真研究[2-8]。針對北斗系統星間鏈路實際應用的研究成果也非常令人鼓舞[9-14]。北斗三號試驗衛星發射之后,最新研究成果顯示,在星間測距數據的支持下,軌道徑向的精度達到10 cm[9]。
通常星間鏈路采用時分多址的運行模式,北斗系統的星間鏈路通過相控陣天線實現信號接收、發射和波束指向控制,提供Ka頻段單頻偽距觀測量[15-16]。在任一時刻(隙)一顆衛星只能按照預先確定的鏈路規劃與另外一顆衛星進行通信和測距。同一衛星對其他衛星的偽距觀測量是分別在不同時刻(隙)獲得的。已有的利用星間鏈路數據進行定軌和時間同步的方法[4-5,7-8,13,15-18],都首先將原始的單程測距觀測量進行歷元歸化,得到在指定時刻的虛擬觀測量(即歸化偽距),例如將同一時隙內一對衛星相向的兩個單程偽距歸算到最近的同一個整3 s時刻[9]。然后,進一步構造出無鐘差組和無幾何組合觀測量[5-7,8,13,15-18],分別用于軌道和鐘差確定,即定軌和時間同步是獨立進行的;或者,另一種方式,直接采用單程歸化偽距聯合地面監測站數據同時確定導航衛星軌道和鐘差[19-21]。后者的最大優勢是可以同時確定衛星軌道和鐘差,還可估計星間鏈路設備時延相對于導航信號設備的時延偏差,是進行星間鏈路設備時延在軌標定的有效方法[19,21],但還未見有用于BDS-3星間鏈路實際數據處理的報道。本文延續這一思路,但是更進一步地,無須進行歷元歸化,直接采用原始單程偽距觀測數據聯合地面監測站數據同時確定衛星軌道、鐘差及星間鏈路設備時延偏差。
1 觀測方程
1.1 星間偽距觀測方程
由于采用時分多址測量體制,一顆衛星對其他可測衛星的星間測距被分配在不同的時隙進行,假設在ti,j時刻衛星i獲得對衛星j的星間測距觀測量為Pi,j,觀測方程可表示如下[9,21]
Pi,j(ti,j)=|Ri(ti,j)-Rj(ti,j-τi,j)|+δi(ti,j)-
δj(ti,j-τi,j)+Δj+βi+ω
(1)
式中,τi,j為星間鏈路信號在空間傳播的時間;Ri和Rj分別為衛星i和j在信號接收和發射時刻的位置;δi和δj為以距離表示的衛星i和j的時鐘偏差;Δj和βi分別為星間鏈路設備發射和接收的硬件時延,在一段時間內通常可視為穩定不變量;ω為測量噪聲。式(1)省略了信號傳播的相對論延遲、衛星天線相位中心偏差等改正項。
1.2 地面接收機偽距和相位觀測方程
(2)
1.3 聯合觀測方程
不同測站的接收機通過鎖定導航信號進行時鐘同步(同步時間差常小于1 us,一般不超過1 ms),因此同一采樣歷元不同測站對同一衛星的觀測量所對應的信號發射時刻的差異也很微小(遠小于1 s)。而導航衛星配置了高精度的原子鐘,在如此短的時間內衛星鐘差的變化可以忽略。因此在處理地面監測站數據時,將同一歷元不同觀測量對應同一衛星的鐘差視為同一個值。
BDS-3衛星為每條鏈路分配的測量和通信時隙寬度為3 s[9],用于接收和發射信號的時間分別為1.5 s,每顆衛星獲得的星間偽距觀測量以約3 s的(整數倍)間隔分布在時間軸上,因此每個觀測量對應不同時刻的衛星鐘差。假設一顆衛星可以對10顆衛星進行星間測距,則該星對第一顆和最后一顆衛星進行觀測的時間差可達到30 s。對于高精度的定軌和時間同步,這兩個觀測量包含的鐘差應該視為不同的值。因此,每個星間單程偽距觀測量包含獨有的兩個鐘差參數,沒有多余觀測,不能通過平差以改進軌道和鐘差。為此,已有的方法都需要對星間鏈路數據進行歷元歸化,得到(至少兩個)同時觀測的歸化偽距觀測數據,以便分離軌道和鐘差信息[5,9,10,15]。
本文將直接處理原始星間單程偽距數據。為了能夠直接對原始的單程偽距觀測量進行平差解算,首先需要解決原始觀測數據的非同時觀測問題。為此,將連續的時間軸劃分為離散的互不重疊的時間窗,每個時間窗的寬度為w。在時間窗內,任意時刻t的衛星鐘差用多項式表示為
(3)

對鐘速進行改正,并忽略高次項,則單程星間偽距觀測方程可以表示如下

(4)

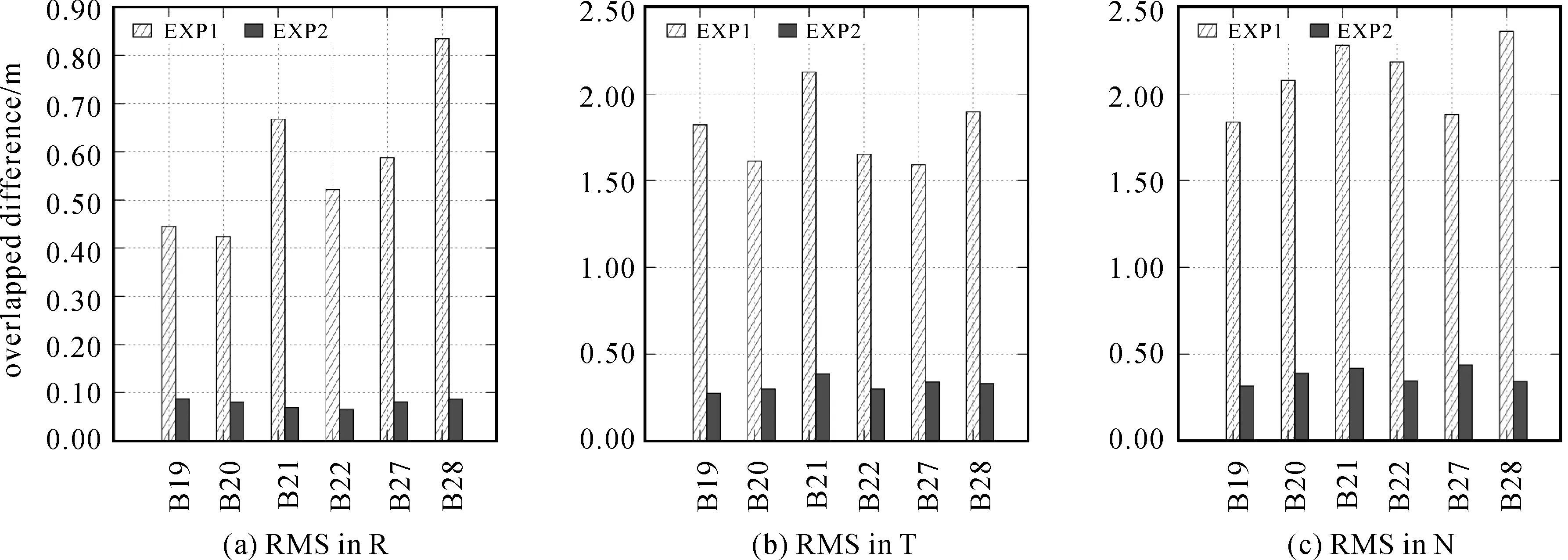
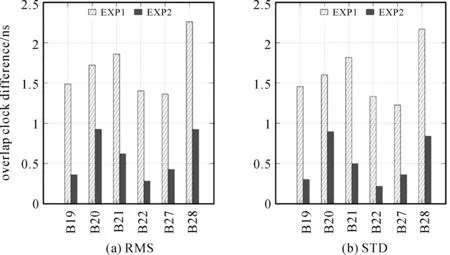
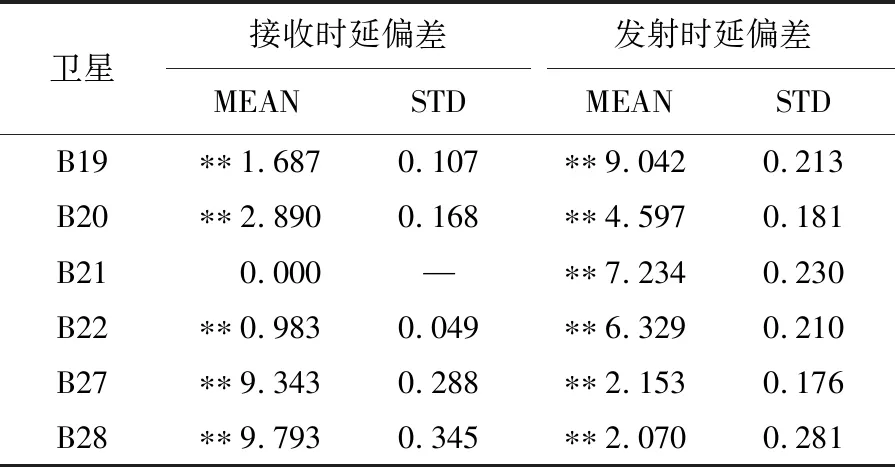
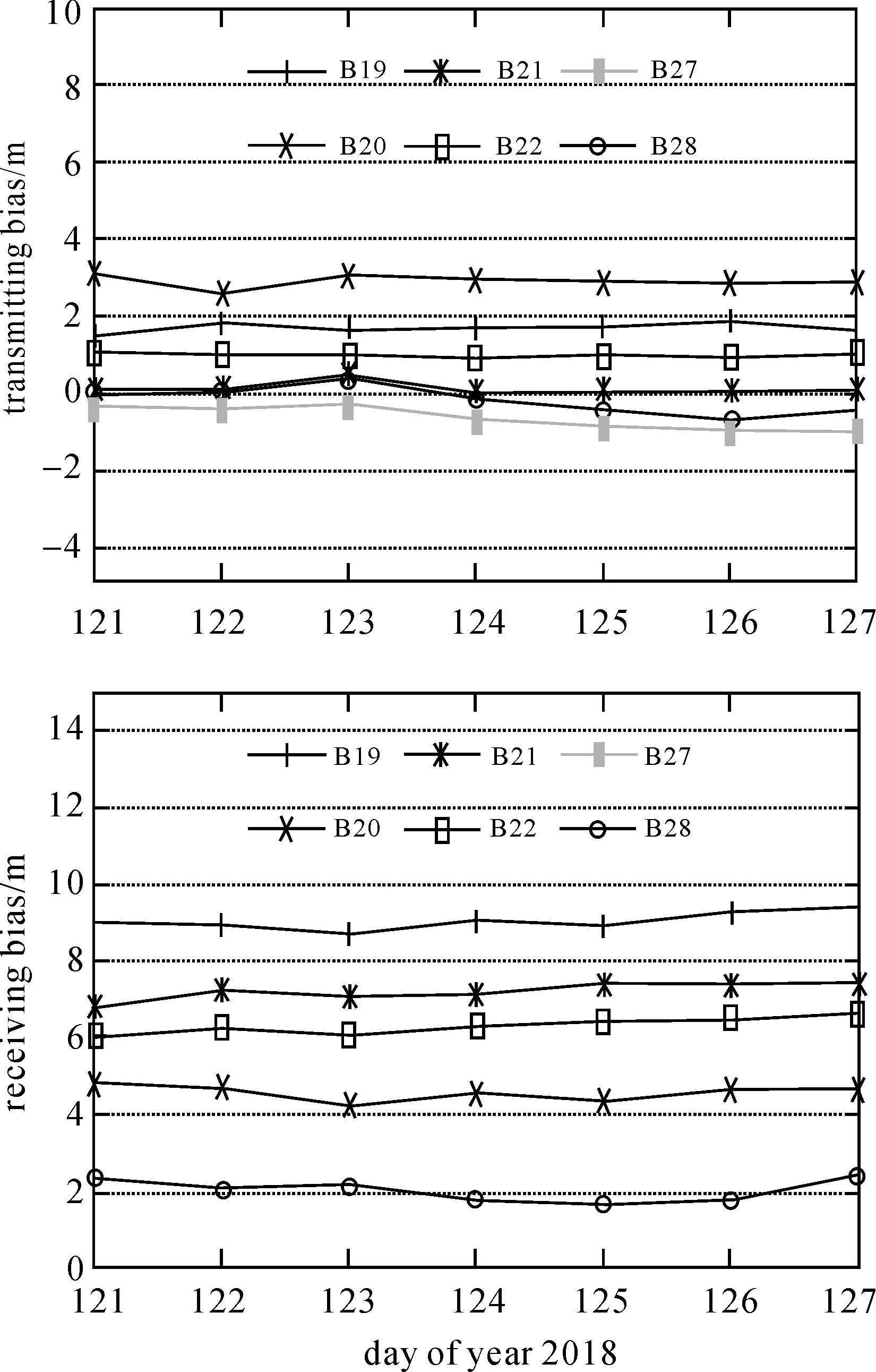
為了將星間測距數據與地面監測站數據構成聯合觀測方程,最簡單的方法是將地面監測站的觀測歷元時刻tk作為上述時間窗的參考時刻,即令tw,k=tk。這樣鐘差多項式的零次項系數就可用tk時刻的衛星鐘差替代。省去推導過程,直接給出第k個時間窗(0≤ti,j-tk (5) 利用觀測方程式(5)確定軌道和鐘差的數據處理過程與單獨處理地面觀測網數據的過程幾乎完全一致(用時間窗概念代替了歷元概念),只是星間偽距觀測量的函數模型與地面接收機數據不同。眾所周知的,在解算上述方程時,必須在每個時間窗(歷元)選擇一個鐘差參數作為鐘差基準。此外,由于時延偏差參數的絕對值也是不可測的,需要選擇一個時延偏差參數作為基準以消除方程的秩虧[21]。 為了驗證上述方法,收集2018年5月1—9日(DOY121—129) BDS-3的6顆MEO衛星(B19、B20、B21、B22、B27和B28)的星間偽距數據和國際GNSS監測評估系統(iGMAS)國內6個監測站(西安、武漢、北京、長春、烏魯木齊、拉薩)的觀測數據進行聯合定軌和鐘差確定試驗。為了考察星間鏈路數據的貢獻,進行了以下兩組試驗: 試驗1(EXP1):僅用地面監測站數據。 試驗2(EXP2):同時利用地面監測站和星間鏈路數據。 采用SPODS軟件[22]進行解算,定軌弧長為3 d。其中地面接收機數據采用B1I和B3I雙頻數據,采樣間隔為5 min,按照2 m和0.02 m的先驗精度對偽距和載波相位進行定權,并根據高度角按照函數sin2e進行降權,截至高度角取10°。測站坐標和地球自轉參數固定于已知值,衛星軌道參數包括初始狀態矢量和ECOM模型的5個參數(D0,Y0,B0,Bc&Bs),對流層天頂延遲的初值采用Saastamoinen模型計算,采用GMF作為映射函數,對每一個測站,每2 h估計一個天頂對流層延遲參數,每24 h估計一組水平方向的梯度參數。將監測站數據采樣時刻作為星間鏈路各時間窗的參考時刻和中心點,時間窗寬度取為1 min,星間單程偽距數據按照0.1 m精度定權。未知參數還包括每個歷元的衛星和接收機鐘差、每個無周跳弧段的消電離層組合非差模糊度參數,每顆衛星的星間鏈路接收和發射時延偏差參數。采用相鄰兩個處理弧段的重疊段互差來評估軌道和鐘差的確定精度,重疊弧長為2 d。 圖1顯示了兩組試驗中各顆衛星軌道重疊段互差在R、T和N方向的RMS。可以看出,試驗1中,R方向的RMS都超過0.5 m,T方向的RMS超過了1.5 m,N方向的RMS在2 m左右。加入星間偽距數據后,R方向的RMS不超過0.1 m,T和N方向的不超過0.5 m。平均RMS分別為0.078、0.321和0.375 m,改進幅度分別為86.5%、82.0%和82.2%。 圖2統計了兩組試驗中各衛星鐘差重疊互差的RMS和STD。可以看出,試驗1中,各衛星的RMS和STD分別大于1.3和1.2 ns,平均分別為1.682和1.600 ns。試驗2中,各衛星的RMS和STD都顯著減小,平均值分別為0.589和0.519 ns,改進弧度分別達到65.0%和67.6%。由于每顆衛星的觀測鏈路數量還比較少,鐘差精度的改進很可能是直接得益于軌道精度的改進。但星間鏈路數據的加入使衛星鐘差的有效觀測(至少有兩個以上觀測數據)弧段顯著增加,例如在本次試驗中提高了85.7%。如果星座健全,則很容易實現全弧段跟蹤。 圖1 按衛星統計的衛星軌道重疊互差RMSFig.1 RMS of overlap orbit differences for each satellite 圖2 按衛星統計的衛星鐘差重疊互差的RMS和STDFig.2 RMS and STD of overlap clock differences for each satellite 圖3顯示了年積日121—124共計3 d弧段星間單程偽距觀測量的殘差序列。可以看出,絕大部分的殘差都小于0.2 m,統計得到RMS為0.082 m。統計7個定軌弧段,各顆衛星接收的星間偽距數據殘差的平均RMS分別為:0.067、0.071、0.064、0.067、0.082和0.145 m,其中衛星B28的偽距殘差明顯比其他衛星大得多,6顆衛星的RMS平均值為0.083 m。 圖4給出各顆衛星接收和發射時延偏差的估值序列(每顆衛星分別扣除一個值)。表1統計了各顆衛星發射和接收時延偏差的平均值(僅顯示個位數以下數值)和標準差。衛星B27和B28同類時延偏差參數的均值相差不超過0.5 m。從標準差來看,除了衛星B28的接收時延偏差之外,STD都小于0.3 m(合1 ns)。衛星B28的接收和發射時延偏差都是所有衛星中最大的,相應的星間單程偽距殘差的RMS值也是最大的。 表1發射和接收時延偏差均值和標準差 Tab.1 Mean value and standard deviation of the estimated ISL receiving and transmitting hardware delay biasm 圖4 星間鏈路接收和發射時延偏差估值序列Fig.4 Estimates of ISL receiving and transmitting hardware delay bias 由于星間鏈路采用時分多址的測量體制,同一衛星的每個觀測量都是在不同時刻測量獲得的,每個觀測量都包含兩個獨有的鐘差參數,所以沒有多余觀測,不能通過平差確定軌道和鐘差。已有的方法都通過歷元歸化將(至少兩個)不同時刻獲得的星間鏈路數據歸算到指定的同一目標時刻,從而能夠進行平差處理[21]或者對軌道和鐘差信息進行解耦。這種思路最初可能由Ananda(1990)提出[15],被許多學者沿用至今[9-11,14]。 本文方法的巧妙之處在于:①采用多項式描述衛星鐘差,使原本非同時觀測的星間單程偽距數據對應于共同的鐘差參數——多項式系數,從而能夠直接進行平差;②通過合理設置時間窗,控制多項式模型誤差。實際上就是用分段多項式描述衛星鐘差。該方法無須對星間鏈路數據進行歷元歸化,也無需對兩顆衛星的相向測距數據進行匹配以分離軌道和鐘差信息。數據處理過程非常簡潔,與傳統地面監測站數據處理過程幾乎一致。與現有方法相比,該方法的優點還表現在可以同時解算出衛星軌道、鐘差和星間鏈路設備相對于導航設備的硬件時延偏差,軌道和鐘差更加自洽,獲得的時延偏差估計值可以用于修正星間鏈路觀測數據,并應用于自主導航。直接處理原始單程偽距數據的另一個好處是可以單獨分析每個星間鏈路發射或接收設備的數據質量或設備性能。 上述用分段多項式表示(衛星)鐘差的思想,還可以用于(聯合)其他同時或非同步觀測數據,如星地雙向時間比對數據或錨固站數據的定軌、時間同步及設備時延標定。 直接利用原始的單程星間偽距數據聯合地面監測站數據同時確定BDS-3衛星軌道、鐘差和星間鏈路設備時延偏差,方法相對簡單,所有單程星間觀測量都可以直接參與計算。利用北斗6顆組網衛星的星間偽距數據和6個iGMAS國內監測站數據進行了試驗驗證。結果表明,3 d定軌的重疊段互差在R、T和N方向的RMS分別為0.078、0.321和0.375 m;鐘差的重疊段互差RMS和STD分別達到0.589和0.519 ns。相比于僅用國內監測站的結果,軌道和鐘差的改進幅度分別超過80%和60%。星間鏈路單程偽距殘差的平均RMS為0.083 m,各顆衛星的設備時延偏差估值的穩定度普遍優于1 ns,發射和接收設備時延偏差估值的平均穩定度分別為0.53和0.72 ns。 由于目前掌握數據較少,該方法的穩定性還需要更多數據進行充分驗證。 致謝:感謝國際GNSS監測評估系統(iGMAS)和西安衛星測控中心提供試驗數據。
2 試驗及結果分析
2.1 試 驗
2.2 結果分析
3 討 論
4 結 論