基于遺傳算法的變幅液壓系統(tǒng)動態(tài)特性優(yōu)化
2019-04-08 02:14:04王志紅盧夢成尹冬冬
數(shù)字制造科學(xué) 2019年1期
王志紅,盧夢成,尹冬冬,秦 可
(1.武漢理工大學(xué) 現(xiàn)代汽車零部件技術(shù)湖北省重點實驗室,湖北 武漢 430070;2.武漢理工大學(xué) 汽車零部件技術(shù)湖北省協(xié)同創(chuàng)新中心,湖北 武漢 430070)
高空作業(yè)車是運送工作人員和使用器材到現(xiàn)場并進行空中作業(yè)的專用車輛[1]。高空作業(yè)車變幅動作的平穩(wěn)性直接影響高空作業(yè)車工作時的安全性以及相關(guān)液壓元件的使用壽命,并且變幅液壓系統(tǒng)中的平衡閥是影響系統(tǒng)平穩(wěn)性的一個重要液壓元件[2]。新開發(fā)的一款伸縮臂式高空作業(yè)車,其結(jié)構(gòu)簡圖如圖1所示。以變幅液壓系統(tǒng)為研究對象,基于AMESim系統(tǒng)建模和仿真軟件建立了變幅液壓系統(tǒng)仿真模型,通過仿真方法研究系統(tǒng)相關(guān)參數(shù)對變幅液壓系統(tǒng)動態(tài)特性的影響,并對系統(tǒng)進行優(yōu)化。
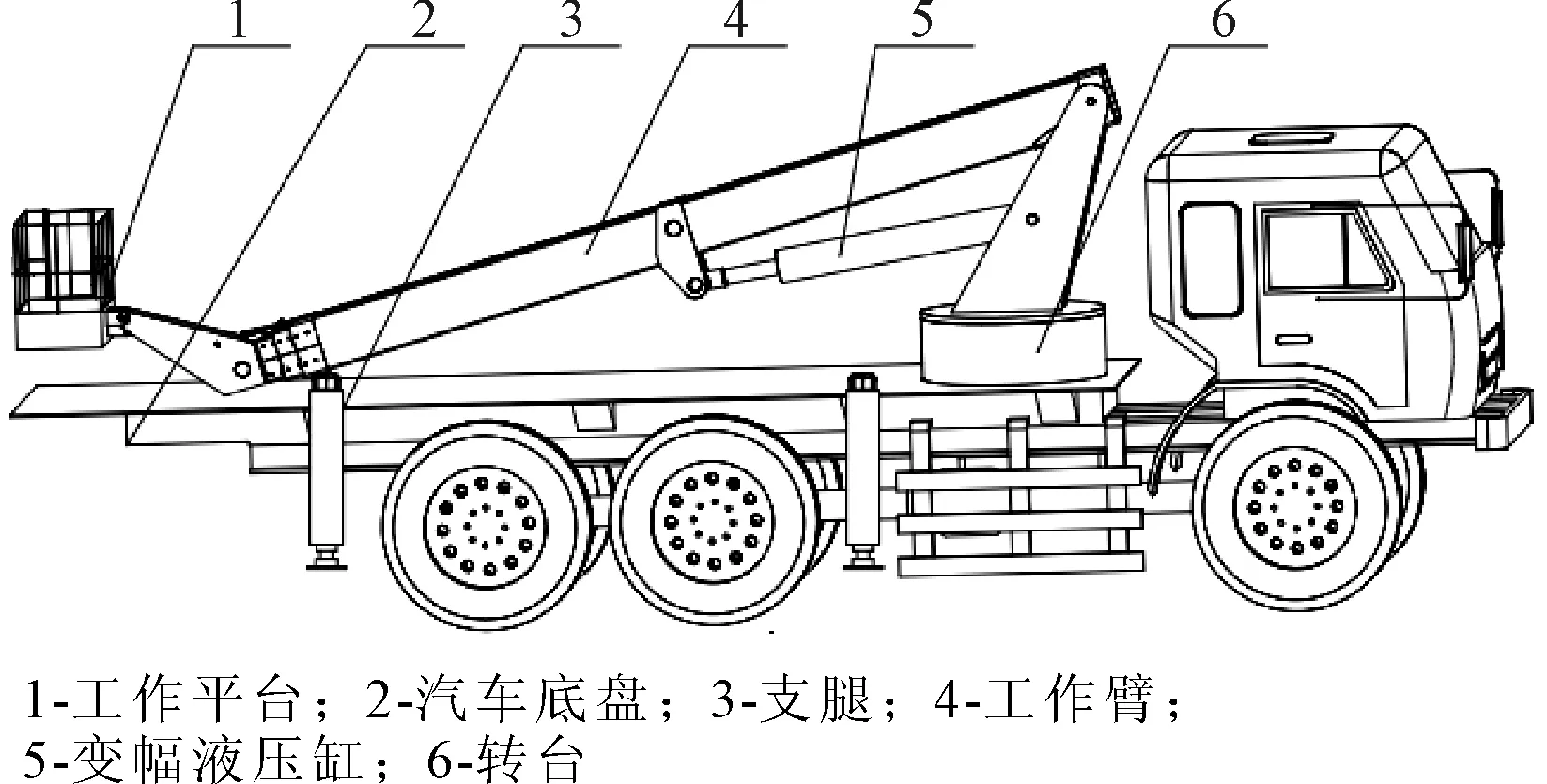
圖1 高空作業(yè)車結(jié)構(gòu)簡圖
1 高空作業(yè)車變幅液壓系統(tǒng)
高空作業(yè)車的變幅液壓系統(tǒng)主要由變幅液壓缸、平衡閥、電磁換向閥等組成。由于高空作業(yè)車對安全性以及穩(wěn)定性要求較高,因此液壓回路中采用雙向平衡閥,以提高高空作業(yè)車工作臂變幅動作的可靠性,同時提高變幅液壓缸運動的穩(wěn)定性;電磁換向閥中位采取Y型,在變幅液壓系統(tǒng)不工作時,使變幅液壓缸驅(qū)動腔卸荷,避免平衡閥被驅(qū)動腔中封閉的壓力開啟,從而導(dǎo)致變幅液壓缸回縮的現(xiàn)象,變幅液壓系統(tǒng)原理如圖2所示。
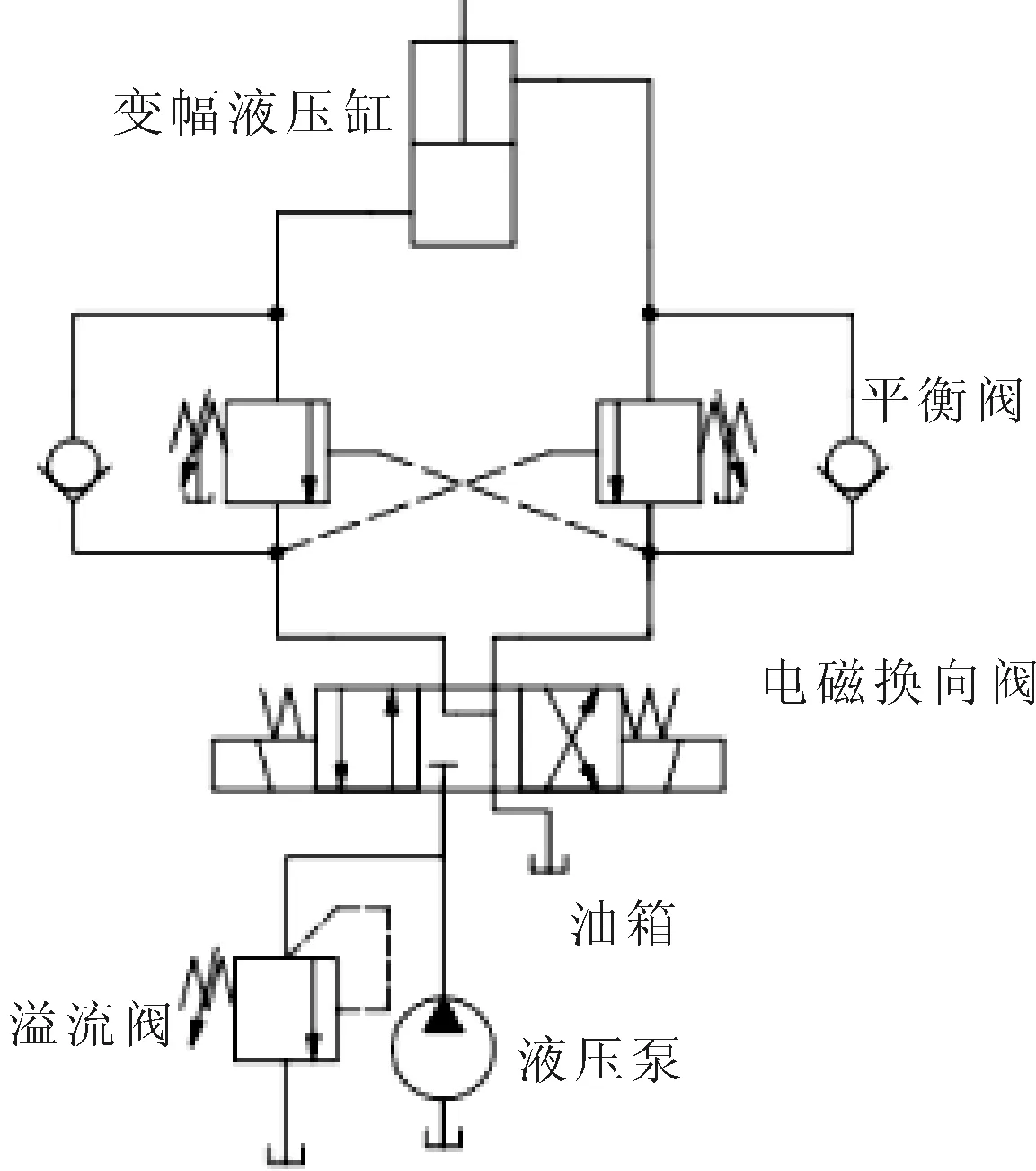
圖2 變幅液壓系統(tǒng)
2 平衡閥工作原理
高空作業(yè)車變幅液壓系統(tǒng)平衡閥采用的是布赫Cindy系列平衡閥,該平衡閥常用于挖掘機、起重機等工程機械的動臂、多級缸的控制[3]。平衡閥結(jié)構(gòu)如圖3所示,其主要有負載保持功能、單向功能和液控節(jié)流等功能。
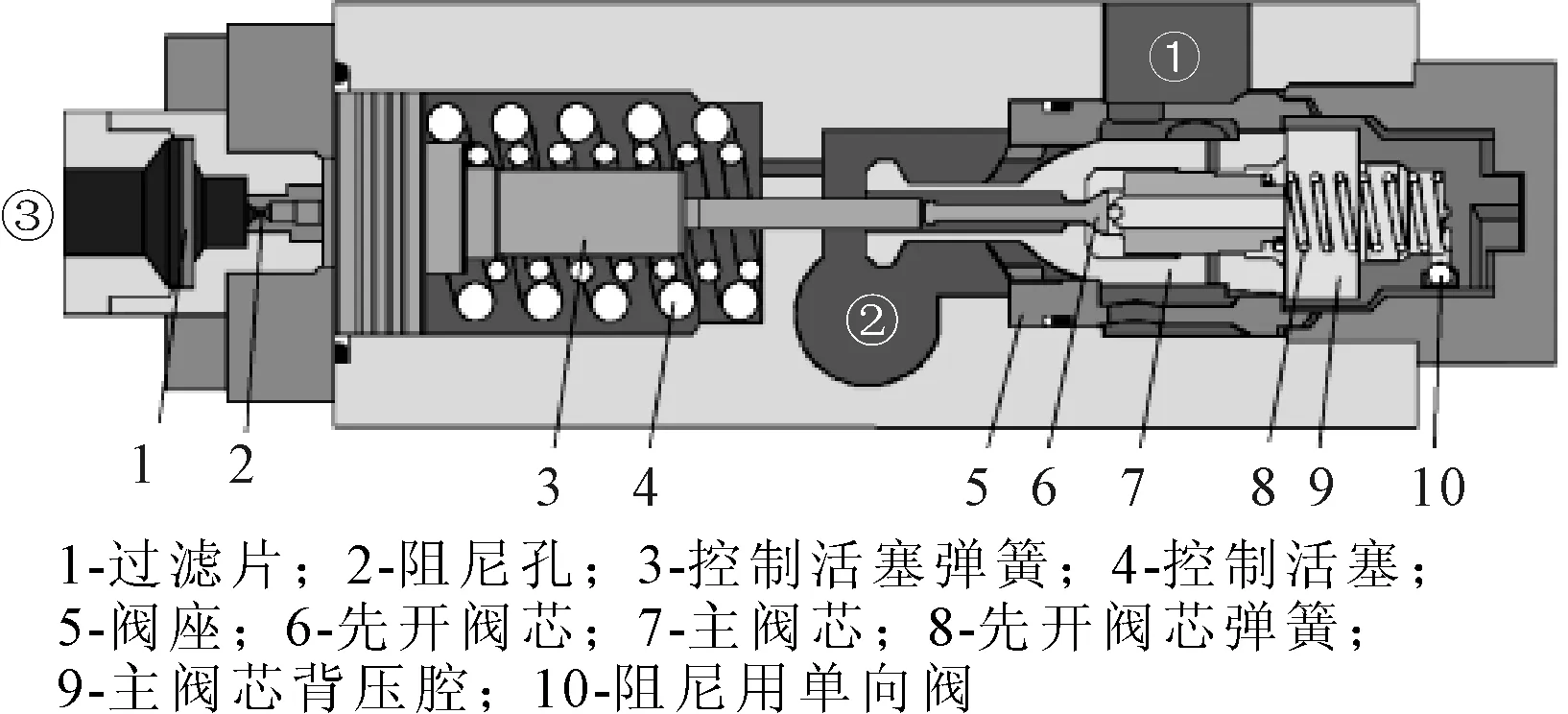
圖3 布赫平衡閥結(jié)構(gòu)圖
(1)負載保持功能。壓力油從口①流入主閥芯的背壓腔,主閥芯和先開閥芯一起向左移動并壓在閥座上。口①和口②沒有連通,因此口①和口②無壓力,此時具有負載保持功能。
(2)單向功能。壓力油從口②進入并作用于先開閥芯和主閥芯上,主閥芯和先開閥芯一起向右移動,當(dāng)其克服先開閥芯彈簧預(yù)緊力后離開閥座,因此壓力油從口②流向口①,通道2-1導(dǎo)通。
(3)液控節(jié)流功能。壓力油從口③進入,通過過濾片以及阻尼孔,并作用在控制活塞左端的大面積上。當(dāng)作用力克服彈簧的預(yù)緊力后,使得控制活塞向右移動。控制活塞帶動先開閥芯向右移動,從而克服控制活塞彈簧的預(yù)緊力。使得主閥芯背壓腔先后經(jīng)過先開閥芯中的小孔、先開閥芯與主閥芯之間的節(jié)流口,回油通道連通,因此壓力下降。主閥芯在壓差的作用下向右移動,通道1-2開口增大。
3 變幅系統(tǒng)動態(tài)特性仿真
液壓系統(tǒng)的動態(tài)特性是指液壓系統(tǒng)由失去原來的平衡狀態(tài)達到新的平衡狀態(tài)過程中所表現(xiàn)出來的特性。液壓系統(tǒng)達到新的平衡狀態(tài)時,各參數(shù)量的變化速率是衡量液壓系統(tǒng)穩(wěn)定性的重要指標(biāo)。筆者主要以變幅液壓缸活塞桿加速度的變化評價變幅液壓系統(tǒng)穩(wěn)定性。
AMESim是法國IMAGINE公司推出的一款可用于流體動力、機械、熱流體和控制系統(tǒng)仿真分析的軟件。AMESim采用基于物理模型的圖形化建模方式,為用戶提供了豐富的元件應(yīng)用庫[4]。通過AMESim軟件進行建模時,可根據(jù)變幅液壓系統(tǒng)原理圖,在保證性能要求的情況下能夠適當(dāng)簡化建模,在 AMESim 的液壓、機械、信號庫中通過選擇相應(yīng)的元件模型構(gòu)建出變幅液壓系統(tǒng)回路的仿真模型,并對每個元件選取子模型[5]。AMESim 液壓中的電磁閥可以作為伺服閥、比例閥和換向閥用,根據(jù)液壓系統(tǒng)實際情況本仿真模型中需要一個電磁換向閥。模型中的電磁換向閥都是通過輸入的控制信號改變液壓油流向,信號為階躍信號[6]。
在建模時將液壓系統(tǒng)的管道假設(shè)為剛性,沒有考慮管道的長度[7]。液壓元件設(shè)計庫功能模塊可以根據(jù)幾何形狀以及物理特性詳細構(gòu)建各種液壓元件[8],在 AMESim 中運用液壓元件設(shè)計庫建立的變幅液壓系統(tǒng)仿真模型如圖4所示。
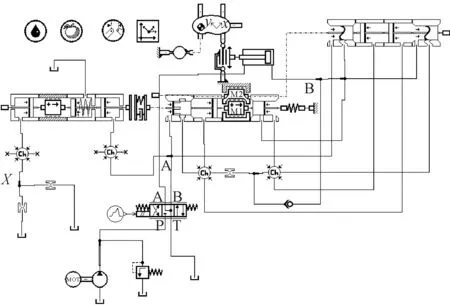
圖4 變幅液壓系統(tǒng)仿真模型
3.1 模型的參數(shù)設(shè)置
在AMESim參數(shù)模式中設(shè)置所有的液壓元件參數(shù),表1中列出了主要的液壓元件參數(shù)。
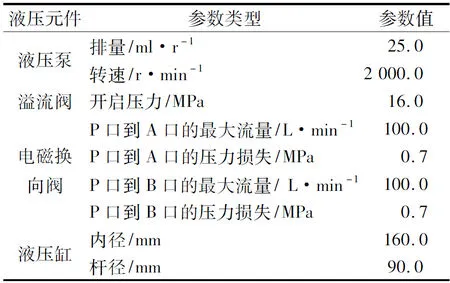
表1 主要液壓元件仿真參數(shù)
根據(jù)高空作業(yè)車工作裝置實際運動過程對變幅液壓系統(tǒng)進行信號源參數(shù)設(shè)置。假設(shè)變幅液壓缸活塞桿向外伸出10 s后停止;然后液壓缸保持靜止5 s;最后液壓缸活塞桿縮回10 s后停止。模擬高空作業(yè)車變幅起升,然后保持靜止,最后變幅下降的經(jīng)典工況。按照運動過程設(shè)置電磁換向閥的信號源如圖5所示。
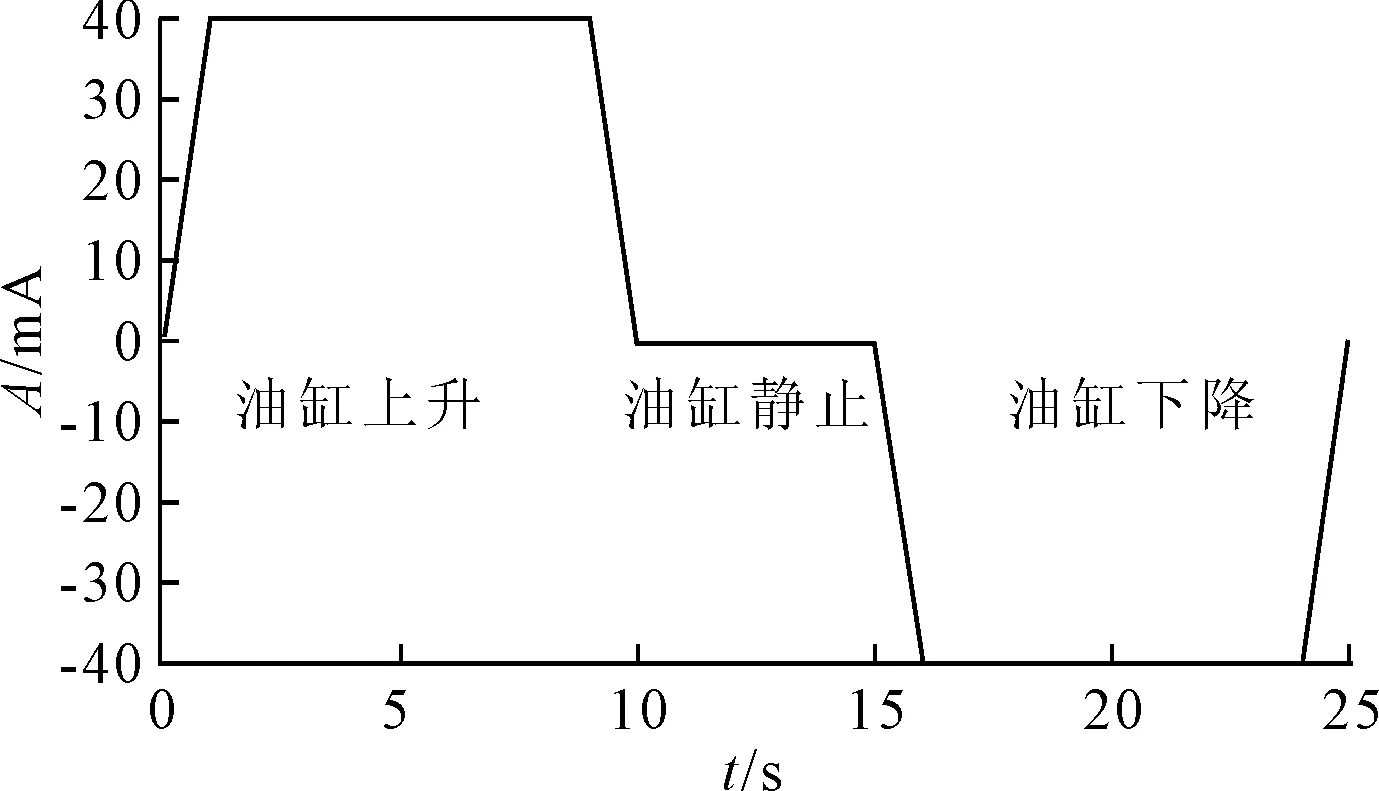
圖5 信號源參數(shù)
3.2 仿真結(jié)果分析
(1)泵轉(zhuǎn)速的影響。高空作業(yè)車變幅液壓系統(tǒng)是在恒定的泵轉(zhuǎn)速下工作,但是在變幅作業(yè)之前可以通過調(diào)節(jié)油門控制泵轉(zhuǎn)速。圖6是泵轉(zhuǎn)速為2 000 r/min、2 500 r/min以及3 000 r/min時變幅液壓缸活塞桿加速度響應(yīng)曲線, 由圖6可以看出,在變幅液壓缸活塞桿的伸出運動階段末期、靜止階段以及縮回運動階段末期時,變幅液壓缸活塞桿加速度的波動較大,并且隨著液壓泵轉(zhuǎn)速的增大,變幅液壓缸活塞桿的加速度波動呈現(xiàn)先增大后減小的趨勢。
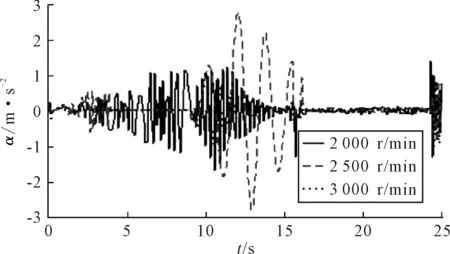
圖6 不同泵轉(zhuǎn)速時活塞桿加速度響應(yīng)曲線
(2)系統(tǒng)壓力的影響。圖7是系統(tǒng)壓力為16 MPa、19 MPa和21 MPa時系統(tǒng)壓力對活塞桿加速度的響應(yīng)曲線,由圖7可以看出,在變幅液壓缸活塞桿的伸出運動階段、靜止階段前期以及縮回運動階段末期時,變幅液壓缸活塞桿加速度的波動較大,并且系統(tǒng)壓力越大,變幅液壓缸活塞桿加速度波動越小,變幅液壓系統(tǒng)平穩(wěn)性越好。
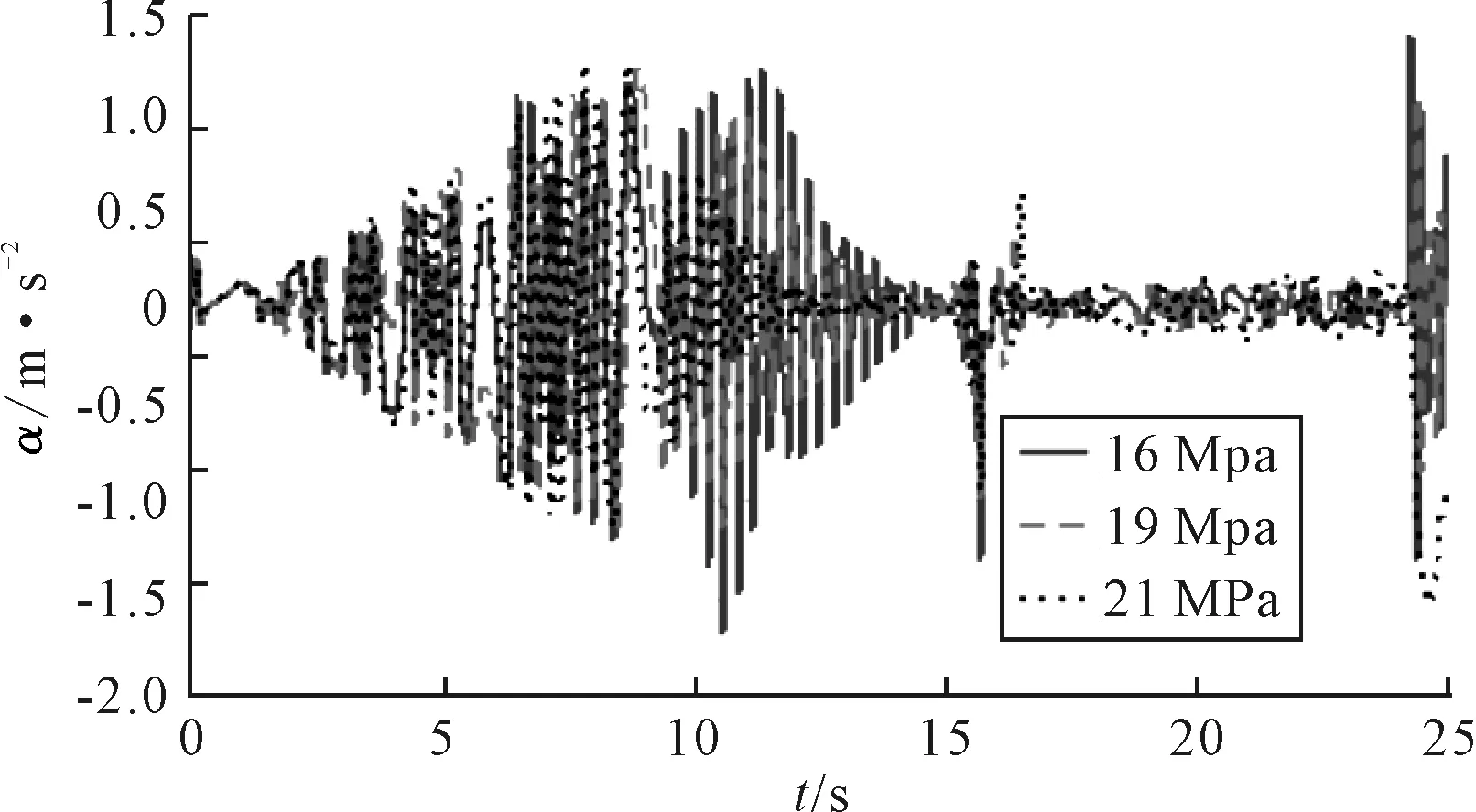
圖7 不同系統(tǒng)壓力時活塞桿加速度響應(yīng)曲線
(3)主閥芯彈簧剛度的影響。圖8是主閥芯彈簧剛度為100 N/mm、150 N/mm和200 N/mm時主閥芯彈簧剛度對活塞桿加速度的響應(yīng)曲線,由圖8可以看出,在變幅液壓缸的伸出運動階段前期、靜止階段以及縮回運動階段末期時,變幅液壓缸活塞桿加速度的波動較大,并且平衡閥的主閥芯彈簧剛度越大,變幅液壓缸活塞桿的加速度波動越大,變幅液壓系統(tǒng)的平穩(wěn)性越差。
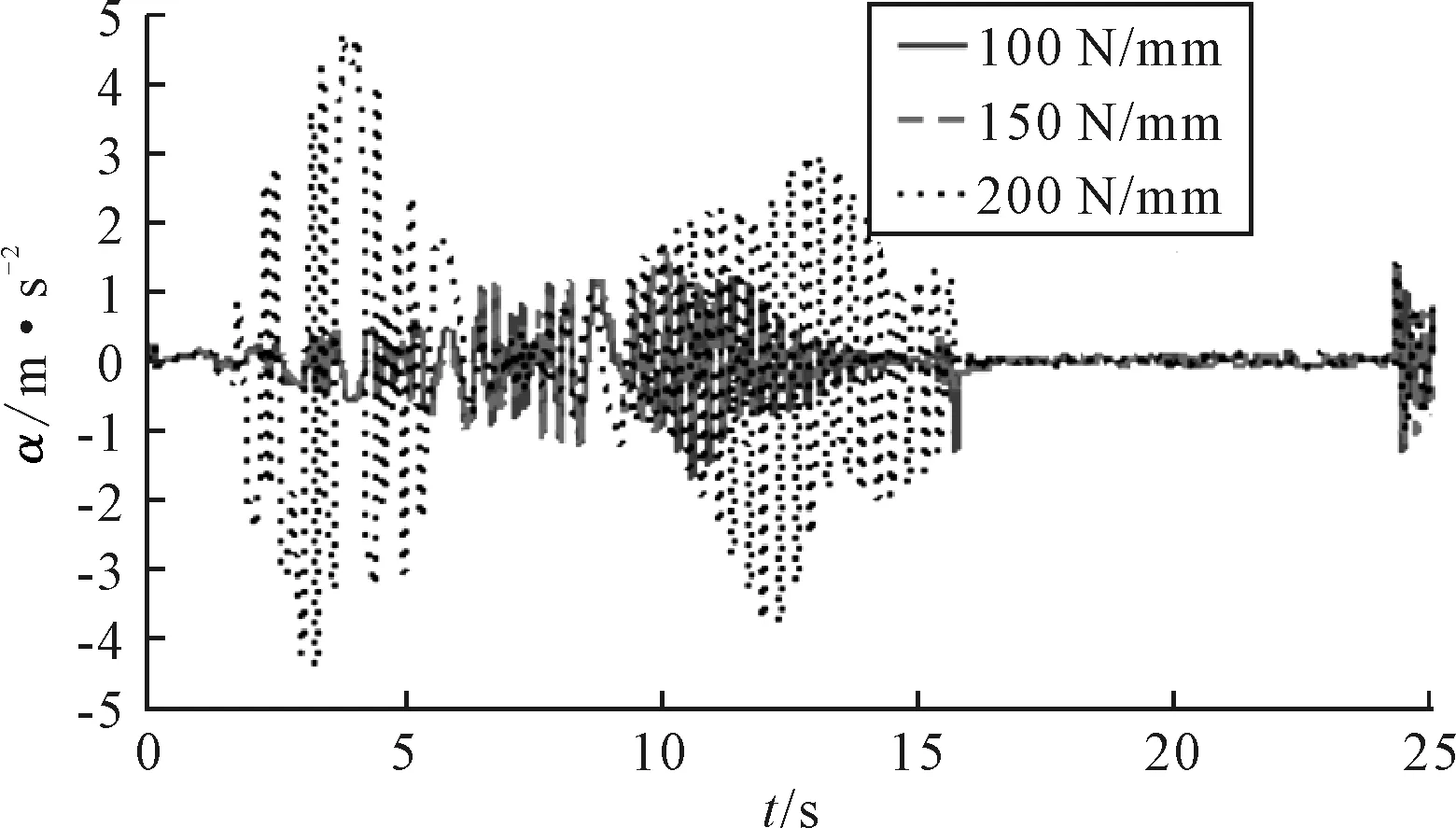
圖8 不同主閥芯彈簧剛度時活塞桿加速度響應(yīng)曲線
(4)控制口阻尼孔直徑。圖9是控制口阻尼孔直徑為0.6 mm、0.8 mm和1.0 mm時變幅液壓缸活塞桿加速度的響應(yīng)曲線,由圖9可以看出,在變幅液壓缸活塞桿伸出運動階段、靜止階段以及縮回運動階段末期時,變幅液壓缸活塞桿加速度的波動較大,并且平衡閥的控制口阻尼孔直徑越大,變幅液壓缸活塞桿的加速度波動越大,變幅液壓系統(tǒng)的平穩(wěn)性越差。
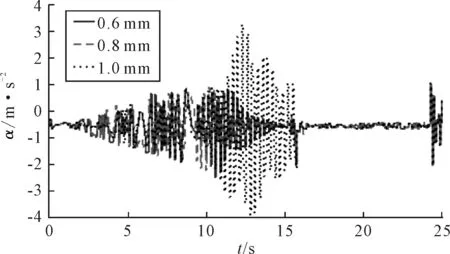
圖9 不同阻尼孔直徑時活塞桿加速度響應(yīng)曲線
4 變幅液壓系統(tǒng)動態(tài)特性優(yōu)化
以高空作業(yè)車的變幅液壓系統(tǒng)動態(tài)特性仿真模型為基礎(chǔ),以提高高空作業(yè)車的變幅液壓系統(tǒng)穩(wěn)定性為目標(biāo),對高空作業(yè)車的變幅液壓系統(tǒng)動態(tài)性能進行優(yōu)化。
4.1 優(yōu)化算法
在AMESim軟件中的Design Exploration功能模塊中提供了兩種優(yōu)化算法:NLPQL(nonliear quadratic programming algorithm)和遺傳算法。NLPQL是利用順序二次規(guī)劃(sequential quadratio programming,SQP)的算法,SQP是一種利用目標(biāo)函數(shù)和約束條件的梯度來解決非線性優(yōu)化問題的方法。由于NLPQL使用的是梯度概念,因此不適用于離散參數(shù)的優(yōu)化。該方法的特點是一旦找到一個局部最小值優(yōu)化即停止,因此,給定的初始值對獲得的優(yōu)化結(jié)果起到很重要的作用。
遺傳算法是一種模仿生物進化過程的優(yōu)化方法,它通過將問題的求解表示為自然進化中適者生存的過程來求得問題的最優(yōu)解。AMESim軟件中遺傳算法的運行過程是首先隨機地生成一個種群,保留最好的個體,淘汰其他的個體;然后隨機地挑選最好的個體作為父代交叉從而獲得這些個體的子代,并且選擇接近于父代的參數(shù)。個體也會有一定的概率變異,它們的參數(shù)值可以進行改變。最后,經(jīng)過若干次迭代后,個體將收斂至一個或數(shù)個最優(yōu)解[9]。
4.2 優(yōu)化步驟
(1)根據(jù)優(yōu)化目的,確定優(yōu)化目標(biāo)。為了提示高空作業(yè)車的變幅液壓系統(tǒng)穩(wěn)定性,根據(jù)變幅液壓系統(tǒng)的動態(tài)特性仿真結(jié)果選取泵轉(zhuǎn)速、系統(tǒng)壓力、平衡閥主閥芯彈簧剛度和控制口阻尼孔直徑作為優(yōu)化對象,將高空作業(yè)車的變幅液壓系統(tǒng)中變幅液壓缸活塞桿的運動加速度均方根值作為優(yōu)化目標(biāo)以表征變幅液壓系統(tǒng)的穩(wěn)定性。
(2)確定設(shè)計變量以及約束條件。在AMESim軟件中打開Export setup功能模塊,分別在Input Parameters(輸入?yún)?shù))和Simple Output Parameters(簡單輸入?yún)?shù))中設(shè)置輸入和輸出變量。根據(jù)高空作業(yè)車的變幅液壓系統(tǒng)動態(tài)特性的仿真結(jié)果選取泵轉(zhuǎn)速、系統(tǒng)壓力、平衡閥主閥芯彈簧剛度和控制口阻尼孔直徑作為輸入?yún)?shù),將變幅液壓系統(tǒng)中變幅液壓缸活塞桿的運動加速度作為輸出參數(shù),以變幅液壓系統(tǒng)動態(tài)特性批運行的仿真結(jié)果設(shè)置約束條件,變幅液壓系統(tǒng)的設(shè)計變量如表2所示。
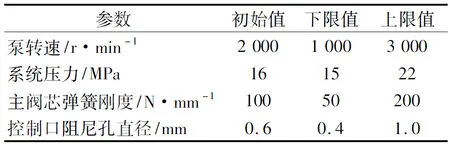
表2 設(shè)計變量
(3)定義優(yōu)化過程。在AMESim軟件運行模式中打開Design Exploration(設(shè)計探索)模塊,按照所設(shè)計的參數(shù)變量及約束條件創(chuàng)建優(yōu)化過程,選擇遺傳算法作為優(yōu)化方法,遺傳算法參數(shù)設(shè)置如表3所示。
4.3 優(yōu)化結(jié)果分析
利用AMESim軟件設(shè)計探索模塊中的優(yōu)化工具Optimization中的遺傳算法對高空作業(yè)車的變幅液壓系統(tǒng)動態(tài)特性進行優(yōu)化,初始種群生成后進行迭代計算,在經(jīng)過20代進化后,滿足結(jié)束條件,優(yōu)化計算結(jié)束,最終通過計算輸出各參數(shù)的最優(yōu)解,優(yōu)化前后的結(jié)果對比如表4所示。

表3 遺傳算法參數(shù)設(shè)置

表4 變幅液壓系統(tǒng)動態(tài)特性參數(shù)優(yōu)化前后對比
將通過遺傳算法得到的變幅液壓系統(tǒng)動態(tài)特性的優(yōu)化參數(shù)應(yīng)用到變幅液壓系統(tǒng)的動態(tài)特性仿真模型中,獲得優(yōu)化前后變幅液壓缸的活塞桿加速度響應(yīng)曲線如圖10所示。
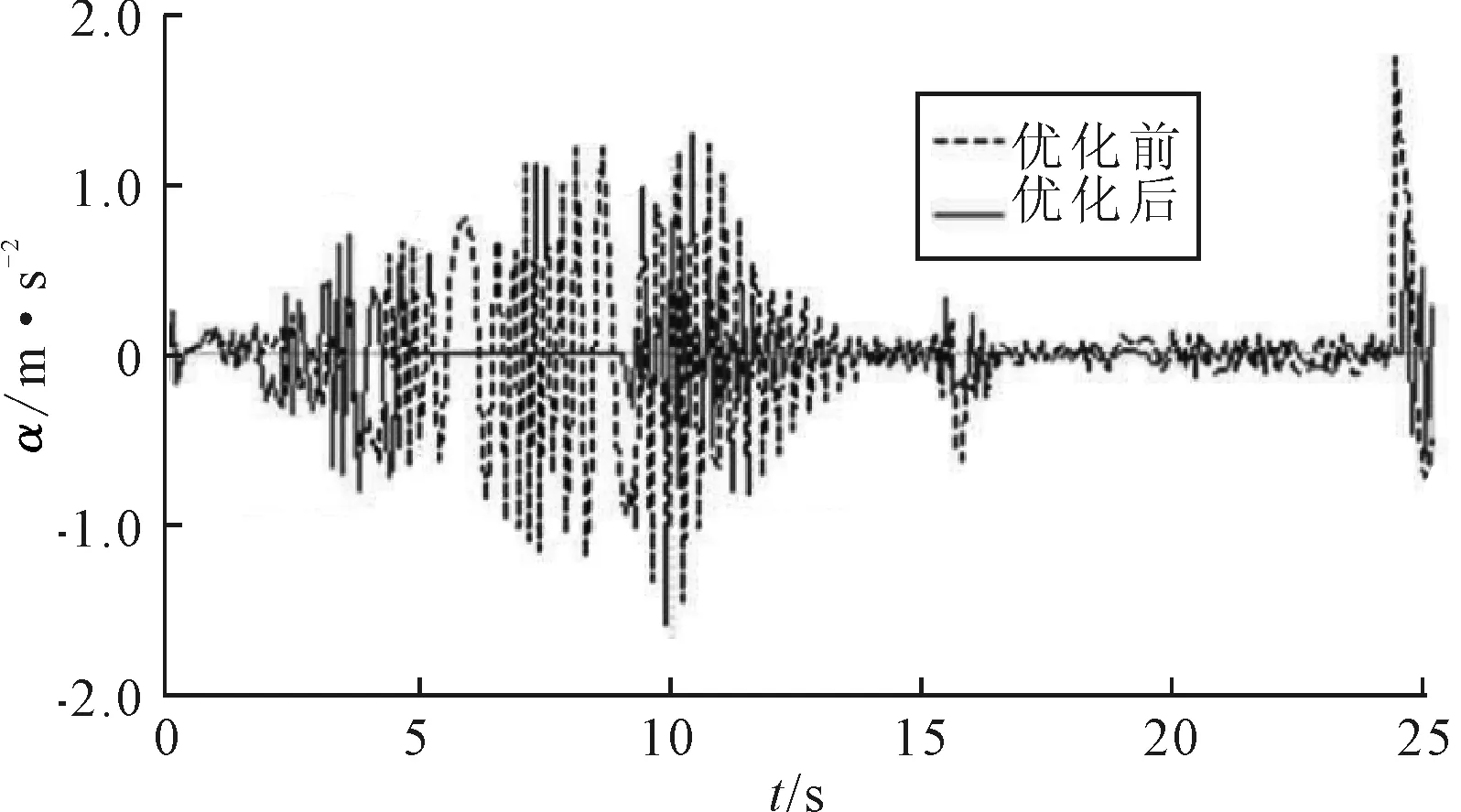
圖10 優(yōu)化前后變幅液壓缸活塞桿加速度響應(yīng)曲線
由圖10可知,在變幅液壓缸活塞桿的伸出運動階段、靜止階段以及縮回運動階段末期時,變幅液壓系統(tǒng)參數(shù)經(jīng)過優(yōu)化后的變幅液壓缸活塞桿加速度的波動明顯減小,優(yōu)化前的變幅液壓缸活塞桿的加速度峰值為1.5 m/s2左右,優(yōu)化后的變幅液壓缸活塞桿的加速度峰值為0.8 m/s2左右。由表4可知,通過遺傳算法優(yōu)化后,變幅液壓缸活塞桿的加速度均方根值減少了43.5%,優(yōu)化效果明顯。
5 結(jié)論
(1)分析了高空作業(yè)車變幅液壓系統(tǒng)以及平衡閥工作原理,并基于AMESim建立了高空作業(yè)車變幅液壓系統(tǒng)仿真模型,通過批運行分析了相關(guān)參數(shù)的變化對變幅液壓系統(tǒng)動態(tài)特性的影響。
(2)由仿真結(jié)果可知,泵的轉(zhuǎn)速越大,活塞桿的加速度波動越大,系統(tǒng)平穩(wěn)性越差;系統(tǒng)壓力越大,活塞桿的加速度波動越小,系統(tǒng)平穩(wěn)性越好;平衡閥主閥芯彈簧剛度及控制口阻尼孔直徑越大,活塞桿加速度波動越大,系統(tǒng)平穩(wěn)性越差。
(3)基于遺傳算法對影響變幅液壓系統(tǒng)動態(tài)特性的參數(shù)進行優(yōu)化,得到了變幅液壓系統(tǒng)的最優(yōu)參數(shù),仿真結(jié)果表明,優(yōu)化后變幅液壓缸活塞桿的加速度均方根值減少了43.5%,優(yōu)化效果明顯,對變幅液壓系統(tǒng)的優(yōu)化設(shè)計提供了一定的參考。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34