撓性衛星的姿態控制算法
2019-04-05 14:19:54李浩東
青年與社會 2019年7期
李浩東

摘 要:傳統的衛星姿態控制算法未考慮到撓性部件對衛星本體姿態的影響(例如太陽能帆板的振動),為削弱這一不利影響,基于對衛星三軸姿態控制的研究,本文建立了衛星的數學模型并設計了一種考慮了撓性附件影響的PID控制系統。最后對PID控制器進行了MATLAB仿真,仿真結果表明,該PID控制系統對具有撓性附件影響的衛星的姿態有很好的姿態控制效果。
關鍵詞:三軸衛星;撓性太陽能帆板;PID控制
自1957年10月4日,世界上第一顆人造地球衛星"斯普特尼克一號"發射升空后,世界衛星事業蓬勃發展,至今已發射了約6600顆人造地球衛星,應用十分廣泛。隨著衛星功能的日益強大,星載設備愈來愈多,衛星正不可避免的向大型化的方向發展。為了滿足衛星的動力需求、更好的利用衛星,衛星上往往帶有大型撓性太陽能帆板、撓性天線等撓性附件,屬于一種撓性多體結構 [1]。
撓性附件具有結構大、質量輕、剛度柔的特點[2],在衛星調整其姿態時,控制力在改變衛星的位置與姿態的同時還可能造成撓性附件振動、多體運動、液體晃動與內外擾動等影響,這些預期之外的作用會與衛星剛性本體的姿態控制發生耦合從而增大了衛星的轉動慣量和受到的干擾力矩[3]。但是傳統的剛性衛星在其三軸控制系統中未考慮到這樣的問題,導致將帶有撓性附件的衛星模化為剛體得到的控制律并不能正確控制衛星的動力學行為,并且,撓性體的振動速率與大范圍剛體運動的速率呈正比例關系,當剛體運動速率大于等于某一值時,傳統的動力學模型的誤差較大,甚至完全錯誤[4]。下面介紹一個典型例子:
1958年,美國第一顆人造衛星“探險者一號”終于在“先鋒號”的失敗后成功發射,舉國歡慶。殊不知,由于該衛星入軌自旋穩定后懸在星體外面的四根鞭狀天線的彈性振動,造成系統的機械能部分轉化為熱能,最終衛星姿態失穩導致翻滾。之后,又有越來越多由于傳統衛星控制率的缺陷致使衛星姿態控制失穩的事件發生[5]。
1999年,繆炳祺等在論文中詳細介紹了撓性航天器動力學在二十世紀的發展史[6];2016年,張天赫在論文中詳細闡述了對剛性衛星、帶有撓性簇附件的衛星與撓性鏈附件的衛星的模塊化建模問題并提出了對撓性附件動力學模型的修正[7]。目前,帶有撓性附件的衛星的姿態動力學建模的問題已基本得到解決。其實,撓性振動等影響不僅是姿態控制的干擾,還是受控衛星特性的一部分[8],而傳統剛性衛星再設計控制率時忽略了這一特性,導致實際應用時出現了姿態誤差,對于這樣的姿態控制問題的研究,方興未艾。并且我們知道,衛星的正常工作在滿足軌道條件外往往還須要保持一個穩定的姿態,例如天文衛星的望遠鏡的朝向、資源偵察衛星的拍攝機和通信廣播衛星的天線要對準地球等[9]。
為削弱撓性附件對衛星本體姿態的影響,本文通過引入對撓性太陽能帆板的有限元分析,對剛性三軸衛星的模型進行了修訂,構建了一個具有撓性太陽能帆板物理影響的三軸衛星數字模型,同時設計了PID控制器,通過MATLAB仿真表明,該控制器對上述衛星模型進行了有效控制。
一、衛星模型與姿態控制流程
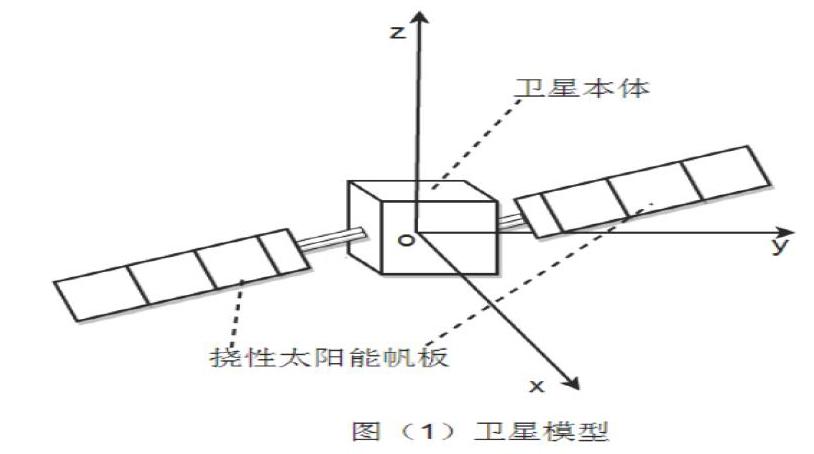
本文構建的衛星模型(圖1)包括衛星本體、撓性太陽能帆板等。并且建立了衛星的本體坐標系(原點o與衛星的質心重合)。由于衛星繞x軸旋轉為滾轉運動;繞y軸旋轉為俯仰運動;繞z軸旋轉為偏航運動,故x軸為滾轉軸;y軸為俯仰軸;z軸為偏航軸。
在建模、控制器設計與仿真時,本文把衛星的本體(不包括撓性太陽能帆板)模化為剛體。而實際中,衛星本體并不只是一個簡單的剛體,還有、燃料、天線等撓性體,這些撓性體都會對衛星的姿態控制產生影響。
本文采用以三軸期望姿態為輸入,實際姿態為反饋的衛星閉環控制模型。具體如圖2所示:
圖中:
A:三維矩陣形式的三軸姿態指令,即我們對衛星的期望姿態(給定值)。
B:敏感器(測量元件)測量到的衛星實際姿態數據(包含敏感器的誤差)。
C:期望姿態與衛星敏感器敏感到的實際姿態間的姿態誤差,可以表示為:C=A-B。
D:根據姿態誤差,通過PID控制器的運算,得到的控制指令,作為姿態執行機構的輸入。
E:執行機構輸出的控制力矩,也是衛星動力學模型的輸入。
F:衛星的真實姿態,是衛星敏感器的輸入,也是閉環控制系統的被控量。
在輸入三軸期望姿態指令后,PID控制器會根據期望值與敏感器得到的實際姿態間的誤差姿態,計算輸出三軸控制指令,三軸控制指令會輸入姿態執行機構,并由執行機構產生相應方向的控制力矩。這些控制力矩是衛星動力學模型的輸入,并由動力學模型得到衛星真實姿態。這時,衛星的姿態敏感器會對衛星姿態的各方面數據(如偏轉角)進行精確的測量,隨后得出衛星實際的姿態數據(包含測量誤差)。將期望姿態與敏感器得到的實際姿態進行比較,計算出姿態誤差并根據此誤差進行新一輪的控制,直到預期姿態與實際姿態間的姿態誤差滿足一定的范圍,達到期望的姿態。
二、衛星敏感器
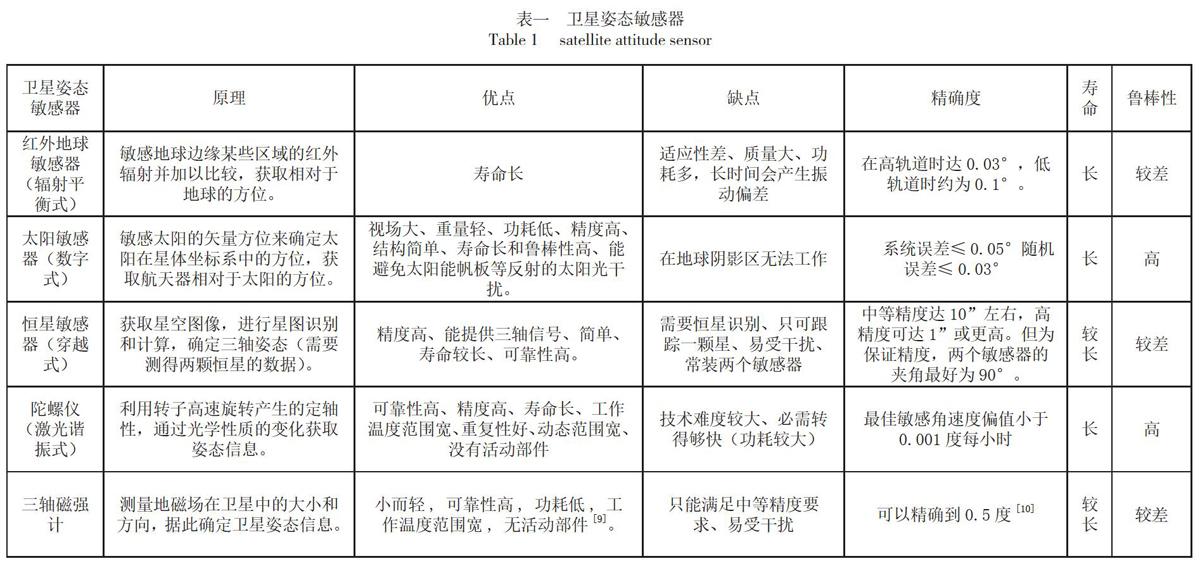
在衛星的閉環控制流程中,衛星姿態敏感器肩負著測量衛星的真實姿態并得到三軸姿態數據的任務,即輸入F(衛星的真實姿態)輸出B(實際姿態數據)(圖2),是至關重要的一環。本文列出并比較了幾種常見的衛星姿態敏感器(表一)。
為了更好地敏感衛星的真實姿態,滿足衛星對姿態敏感的要求,在同一個航天器上往往把多種敏感器進行組合,以綜合不同敏感器的不同優點。本文也進行了組合: 以數字式太陽敏感器為主要的敏感裝置,將激光諧振式陀螺儀作為備份。由于數字式太陽敏感器能夠避免太陽能帆板等反射的太陽光干擾,而且功耗低、精度高、壽命長,故可以持續地對衛星的真實姿態進行準確測量,使誤差在可控范圍之內。但是,當衛星處在地球陰影區時,此敏感器無法接受到來自太陽的信號,無法工作,使閉環系統無法運行。然而,當這種情況發生時,我們將使用激光諧振式陀螺儀。該敏感器精度高、壽命長、重復性好、動態范圍寬,也可以持續而準確地進行測量,并且很好的彌補了數字式太陽敏感器無法在地球陰影區工作的不足。所以,我們將數字太陽敏感器和激光陀螺儀進行組合。
三、衛星的執行機構
在閉環控制流程中,衛星的執行機構是衛星姿態控制力矩的具體執行者。在得到由PID控制器計算出的三軸指令后,執行機構會根據該指令輸出控制力矩,對衛星姿態進行控制,讓衛星姿態向給定值靠近。表二列出了幾種執行機構并對他們進行了比較。
和衛星的姿態敏感器一樣,為了追求更好的姿態控制效果,輸出更準確的控制力矩以及更長的衛星在輪工作時間,在同一個航天器上往往有多個執行機構組合在一起。本文給出的組合是:以動量交換式執行機構中的動量輪為主要的執行裝置,把噴氣推進器作為備份。動量輪可以不斷地從太陽電池獲得能量,持續性很好,而且精度穩定度高、壽命長、輕而小、能耗低,在三軸方向上都安裝上動量輪后,可以對衛星進行穩定而準確的姿態控制,性能優良。但它并不完美,因為在運行過程中,如果衛星受到強的干擾力矩,動量輪就容易達到飽和,這就要求必須有卸載裝置輔助動量輪的工作,噴氣推進器就扮演著這樣的角色。這樣一來,一般情況下的小范圍擾動由動量輪負責,只有在遇到大范圍擾動需要卸載或需要變軌時才用到噴氣推進器,推進器的噴氣周期大大延長,對氧氣的消耗也大大減少。盡管推進器儲備的氣體有限,仍可以使用較長時間。所以這樣組合比較合適。
四、有限元分析
有限元分析,是一個用數學方法模擬復雜的物理系統,求解復雜問題的工具。將一個復雜的結構近似成許多簡單而又相互作用的單元,并通過對這些單元以及單元間節點的分析得到整個系統的模擬結果。由于實際上對許多工程問題的分析難以得到準確解,而有限元分析可以對復雜的系統進行高精度的模擬,所以得到了十分廣泛的應用。ANSYS是一款功能強大的有限元分析軟件,在此不做詳細介紹。本文先用CATIA對衛星的尺寸、結構等參數進行了建模,隨后將模型導入ANSYS并輸入衛星的模型參數。ANSYS會模擬出衛星太陽能帆板的28階模態,但由于其中的低階振動不易衰竭影響較大,而高階的很快衰竭,本文只考慮低階振動。
五、衛星的動力學模型
隨著衛星事業的不斷發展,衛星上附帶的撓性附件逐漸趨向復雜,系統中的自由度之間不可避免地存在著耦合作用。這種非線性的特點使得衛星動力學模型的求解非常麻煩,為了簡化,本文在進行建模時認為自由度之間是正交的。
本文用牛頓-歐拉向量力學建模法并結合有限元分析進行衛星動力學建模。其它常用的方法還有凱恩(Kane)方程等。本文將衛星簡化為一個帶有撓性太陽能帆板的剛體,建立了如圖3所示的坐標系。
圖中:
O1-X1Y1Z1為衛星的慣性坐標系;
Ob-XbYbZb為衛星的本體坐標系,其原點是形變前衛星整體的質心;
Ok-XkYkZk為撓性太陽能帆板的坐標系。
Mt是衛星整體上n個質點中任意一個,由于本文將本體視作剛體,Mt處的衛星形變位移為零,其在慣性系的位置可以用向量表示。Mk是衛星撓性太陽能帆板上m個質點中任意一個,由于太陽能帆板是撓性體,Mk處存在形變位移,其位置可以用向量表示。Mt、Mk相對慣性系的線速度為
式中四個向量的物理意義如圖3所示,表示衛星本體的絕對角速度。由于、一經確定即為常量,導數為零;衛星的形變位移在實際情況下是一個小量,可認為。故(1)(2)式又可以寫成
由(3)(4)得到衛星的總動量為
式中MA是衛星整體的質量。由于Ob是形變前衛星整體的質心,Ob處整星的轉動慣量為零,可得,則(5)式可以寫為? ? ? ?由牛頓第二定律可得
式中是衛星受到的總主動力。由模態展開定理可得,其中(i=1,2L)是有限元分析得到的撓性附件的振型矩陣。是撓性附件的模態坐標,由于模態中的低階振動不易衰竭影響較大,而高階的很快衰竭影響較小,為簡化運算,本文只考慮前三階的振動。設A1為本體系到慣性系的轉換矩陣,A2為撓性系到慣性系的轉換矩陣,A3為撓性系到本體系的轉換矩陣,則(7)式又可以寫為
本文定義是撓性太陽能帆板在慣性坐標系中的平動耦合系數,是在撓性系中的平動耦合系數。可得衛星的平動方程為
由于實際中衛星既平動又轉動,本文還推導了衛星的轉動方程。設是衛星相對慣性坐標系的角動量,衛星受到的相對慣性坐標系的力矩,則有
約去衛星轉動過程中的小量后,化簡可得到
式中矩陣、(向量積),I是整星的轉動慣量。本文定義是撓性太陽能帆板在慣性坐標系中的轉動耦合系數,是在撓性系中的平動耦合系數。則衛星的轉動方程為
式(10)與(13)即衛星的動力學方程。
在實際的操作中,還要進行衛星的運動學建模。這是由于衛星姿態敏感器所測得的三軸姿態角及角速度都是相對衛星本體坐標系而非慣性系的,所以需要運動學模型通過轉換矩陣進行姿態的解算將姿態信息轉換到慣性坐標系中,以滿足姿態控制器的要求。
六、衛星控制器設計
在衛星姿態的控制器方面,本文采用PID控制算法,即比例(P)積分(I)微分(D)控制。其輸入輸出關系可由式(14)所示。式中是PID控制器的輸出,是輸入,是比例系數,、分別是積分系數、微分系數。
PID是一種應用廣泛的控制算法,它簡單易懂,實時性好;雖然它得不到精確的模型,但是精巧、復雜的設計結果往往并不比簡單的PID更為優越,因為衛星的姿態控制需要實時性極好的控制器,若要得到精確的模型則需要一定時間。在PID的使用過程中,參數的整定是其中的核心步驟,當一個PID控制器完成安裝后,參數的合適與否直接關系到系統的性能好壞。
PID參數整定的常見方法有經驗法、響應曲線法、衰減曲線法、模糊控制、神經網絡、遺傳算法等[12]。本文采用響應曲線法進行PID參數整定,具體步驟如下:1、在MATLAB中斷開閉環控制的反饋通道,并反復輸入單位階躍信號,進而得到響應曲線。2、曲線中可以得到時間常數、延時時間系數、輸入輸出的階躍值和最大值最小值。3、利用相關公式得到PID的相關參數。本文擬定的參數是KP=0.8824;TI=160;TD=40,在此參數下,用MATLAB進行了衛星姿態角及角速度的仿真,如圖4、圖5所示。
本文模擬的控制時間為500s左右。衛星受到干擾后,衛星真實姿態角(俯仰角)最大誤差為2°左右,期望值為0°;真實姿態角速度(俯仰角)的最大誤差為0.84°/s左右,期望值為0°/s。由上圖可以看出,在控制器的控制下,衛星的真實姿態角與真實姿態角速度都取得了明顯的收斂效果,在450s后,衛星的姿態角與姿態角速度成功達到穩態,穩態精度分別是(1.3×10-3)°和(2.3×10-5)°/s,由此可見,本文設計的PID控制器對本文設計的衛星模型有良好的控制效果。
七、結語
本文的研究內容是削弱撓性附件對衛星本體姿態的影響。首先,本文簡單介紹了:1、帶有撓性附件的衛星模型2、閉環姿態控制流程3、常見的衛星姿態敏感器與執行機構。隨后,本文針對撓性太陽能帆板進行了有限元分析,并構建了一個考慮到太陽能帆板撓性影響的動力學模型。最后,本文設計了一套PID控制器,并在擬定參數下用MATLAB進行了衛星姿態角及角速度的仿真,并取得了良好的姿態控制效果。由于本文考慮了撓性結構對衛星姿態的影響,故本文設計的姿態控制算法具有一定的實際應用價值。
參考文獻
[1] 朱承元,楊滌,楊旭.大撓性多體衛星的自抗擾姿態控制系統設計[J].航天控制,2004, 22(6):25-31.
[2] 吳云潔,李琛,馬征.基于自抗擾滑模的三軸撓性衛星姿態控制[J].系統仿真學報, 2015, 27(8):1831-1837.
[3] 劉剛,鐘超,何益康,等.有大型撓性附件的衛星姿態線性魯棒控制器設計研究[J].上海航天, 2017,34(2):150-160.
[4] 蔣建平.大撓性多體結構衛星剛柔耦合動力學研究[D].國防科學技術大學研究生院, 國防科學技術大學, 2004.
[5] 馬興瑞等著.航天器動力學:若干問題進展及應用[M].科學出版社,2001.
[6] 繆炳祺, 曲廣吉, 程道生.柔性航天器的動力學建模問題[J].中國空間科學技術,1999, V19(5):35-40.
[7] 張天赫. 柔性航天器模塊化動力學建模及模型修正[D].哈爾濱工業大學,2016.
[8] 胡喬木編.中國大百科全書:教育[M].中國大百科全書出版社,1985.
[9] 賈玉紅等編.航空航天概論(第四版)[M].北京航空航天大學出版社,2017.
[10] 田菁, 吳美平,胡小平.三軸磁強計姿態確定[J].國防科技大學學報,2001, 23(5):17-21.
[11] 胡玉琛.衛星姿控系統中的飛輪[J].國外導彈與宇航,1980(10):23-28.
[12] 鵬程主編.自動控制原理(第二版)[M].高等教育出版社,2016.
[13] 黃宜慶.PID控制器參數整定及其應用研究[D].安徽理工大學,2009.
