自主水下航行器網絡化控制系統事件觸發魯棒控制
2019-03-19 11:41:02王敏
探測與控制學報 2019年1期
王 敏
(西安職業技術學院機電工程系,陜西 西安 710032)
1 引言
自主水下航行器(Autonomous Underwater Vehicle, AUV)主要用于海洋探測、水下搜救等應用環境。AUV 系統包括自動駕駛儀、主推進系統、航向舵機伺服系統、橫舵機伺服系統、水聲防碰撞系統、水聲通信系統、GPS 接收系統、組合導航系統、航行陀螺和水深傳感器等。系統采用總線實現部件間的內部互聯。然而,上述網絡化控制系統中,帶寬資源是有限的,因此控制策略的設計除了要考慮控制性能還需要考慮帶寬資源的合理分配。
在大多數情況下,AUV都沿預定航跡穩態航行,而此時采用機動時的傳感器采樣數據發送間隔,就會造成較大的帶寬資源浪費,即使是在機動過程當中,縱向、側向控制回路也不是同時調整的,其采樣數據發送間隔也有調節的余地。而事件觸發控制是解決上述問題的途徑之一。事件觸發機制可以使傳感器節點在“必要”的時候才觸發狀態采集信息的發送進而觸發控制節點控制律的解算,可以用較少的通信帶寬獲得可以接受的控制性能。因此,研究事件觸發控制框架下,AUV控制律的設計對于優化AUV網絡帶寬資源是有現實應用意義的。
與基于周期更新的控制策略不同,基于事件觸發的控制系統由事件觸發條件決定是否有必要進行采樣值傳輸及計算控制律。針對這類方法的研究,目前主要集中在觸發機制設計和系統分析與綜合方法。事件觸發機制的關鍵在于事件觸發的門限值確定,門限過大,觸發控制任務的事件越少,可以減輕網絡負載,但只能使系統在較大范圍內穩定,甚至失去穩定性,門限過小,觸發控制任務的事件越多,有可能造成網絡數據發送過于頻繁的Zeno現象,使網絡負載不可調度,最終影響控制性能[1-3]。系統分析與綜合方法著重研究不同事件觸發機制下保證閉環控制系統穩定的控制策略。文獻[4—5]僅考慮資源受限下基于給定事件觸發機制的控制策略設計,未考慮事件觸發機制的調整對控制性能的影響。文獻[6]研究了基于動態誤差閾值的事件觸發輸出反饋控制策略,并討論了增大系統采樣最小傳輸間隔的方法。文獻[7]針對存在網絡延遲的線性參數變化系統,將協調設計歸結為多胞線性矩陣不等式(Linear Matrix Inequality: LMI)求解問題,提出一種參數依賴的控制和事件觸發機制協調設計策略。文獻[8]提出了一種Try-Once-Discard帶寬調度機制,利用LMIs求解考慮調度策略的H魯棒控制律,但未考慮系統的事件觸發約束條件;文獻[9]以狀態誤差二次型為觸發條件,利用LMIs研究控制律、事件觸發器和帶寬調度策略協調設計問題,試圖使誤差范數最大的控制回路獲得網絡訪問優先權,但未考慮網絡不確定延遲的影響。
上述研究在解決控制與事件觸發機制協調設計方面給出了值得借鑒的方法,在保證控制性能的同時降低了資源占用率,但是存在一定不足,且基于飛行器、AUV等網絡化控制模型的事件觸發控制問題,鮮有報道。本文提出了一種適用于AUV的控制、調度、事件觸發機制一體化協調設計方法。利用參數不確定切換系統描述事件觸發的有界隨機延遲AUV離散時間系統,構造Lyapunov函數并利用LMIs可行性綜合設計魯棒控制律、事件觸發機制及帶寬調度策略,使AUV側向、縱向網絡化控制保持全局漸進穩定。
2 系統建模
2.1 AUV動力學模型
描述AUV空間一般運動的方程組[10]:
(1)
式(1)中,η=[x,y,z,φ,θ,ψ]T為地球固連的慣性坐標系下航行器的位置及姿態向量,x,y,z,φ,θ,ψ分別表示航行器的縱向、側向、垂向位置和橫滾、俯仰、偏航角度;v=[u,v,w,p,q,r]T為與航行器固連的體坐標系下航行器速度向量,u,v,w,p,q,r分別表示航行器的縱向,側向、垂向和橫滾、俯仰、偏航角速度;JΘ(η)∈6×6為轉移AUV體坐標系到慣性坐標系的轉移矩陣;M∈6×6為慣性矩陣,C(v)∈6×6為科里奧利力矩陣,D(v)∈6×6為流體阻力矩陣,g(η)∈6×1為靜力矩陣。δ為由舵或推進器產生的控制力矩或推力。
方程(1)是時變非線性、高維微分方程組,在實際控制律設計時,一般不直接使用上述方程組。若運動方程組滿足如下條件:1)航行軌跡為垂直平面或水平平面內的平面軌跡,如爬潛、直航等;2)直鰭平面為對稱面,在縱向運動中不產生側向力、偏航和橫滾力矩;3)控制系統可以很好地抑制橫滾,使縱向和側向運動鉸鏈耦合的橫滾擾動能夠迅速衰減;4)AUV重心、浮心重合且配重為零浮力;則側向和縱向運動方程可以獨立分解為垂直平面的縱向運動、在水平面內的側向運動和航行器繞其縱軸的橫滾運動,再用小擾動原理, 在一定航速下對其進行線性化。具體過程見文獻[10]。
我們得到的用于控制律設計的某型AUV縱向、側向、橫滾運動線性方程記為:
縱向運動:
(2)
橫向運動:
(3)
橫滾運動:
(4)
上述控制回路中的傳感器、執行機構一般分布于AUV的特定位置,由總線與共享控制器互聯。其網絡結構如圖1所示。系統縱向、橫向、橫滾控制回路={Pi,i=1,2,3},控制回路i中,分布式傳感器單元以周期hi采集AUV姿態、航速等信息。事件發生器σi(k),i=1,2,3用于判斷k×hi時刻,控制回路i傳感器采集的數據是否有必要通過網絡傳輸進而觸發控制律計算并傳輸更新的控制指令至相應的執行機構。調度器Δ(k)用于仲裁k×hi時刻存在多個節點同時申請訪問網絡時,能夠最先獲得訪問權限的節點。自動駕駛儀被多回路共享,用于計算控制律。τsc,τca分別表示敏感單元到自動駕駛儀,自動駕駛儀到執行機構的網絡傳輸延遲。
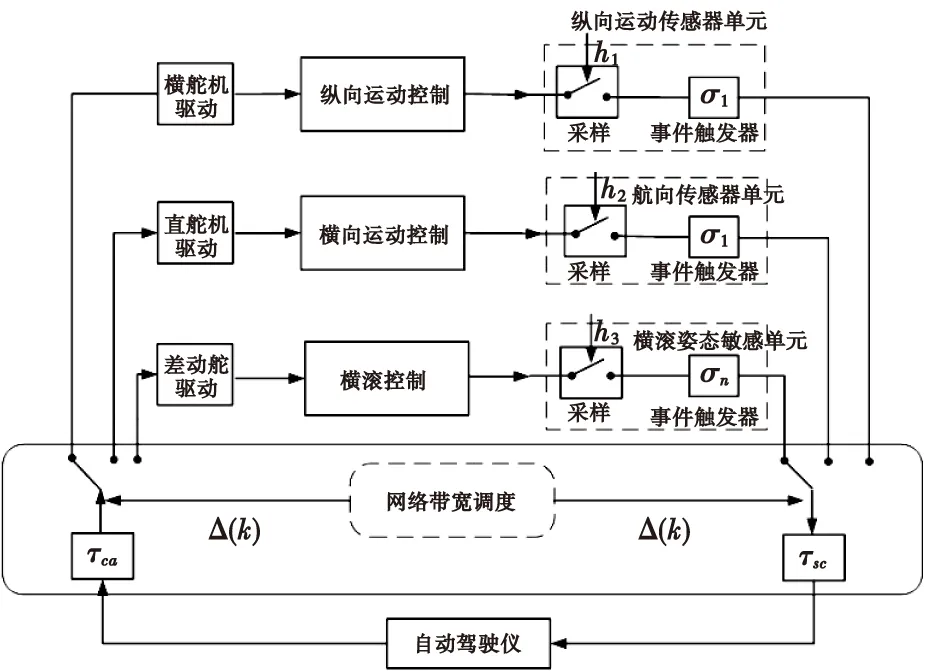
圖1 網絡控制系統結構Fig.1 Structure of network control system
2.2 被控系統離散時間模型
為表述方便,式(2)—式(4)所示的AUV縱向、橫向、橫滾運動方程統一表示為式(5)所示的連續時間線性時不變系統,考慮圖1中的網絡延遲τ(t),系統可由如下方程描述:
(5)
式(5)中,τ(t)=τsa(t)+τca(t) 是隨機延遲,且不大于系統采樣周期(該假設條件一般可以由調度策略如RM、EDF保證)。
令h表示控制回路采樣周期,若tk=k×h時刻觸發控制律解算則:
(6)
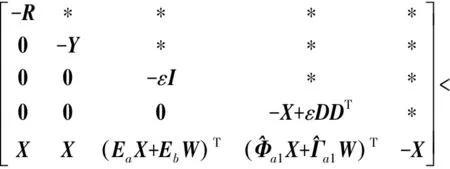
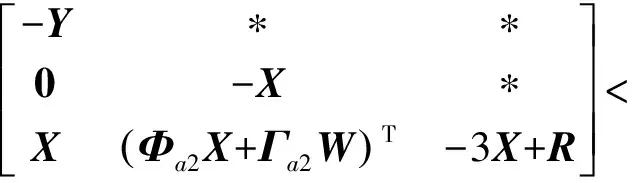
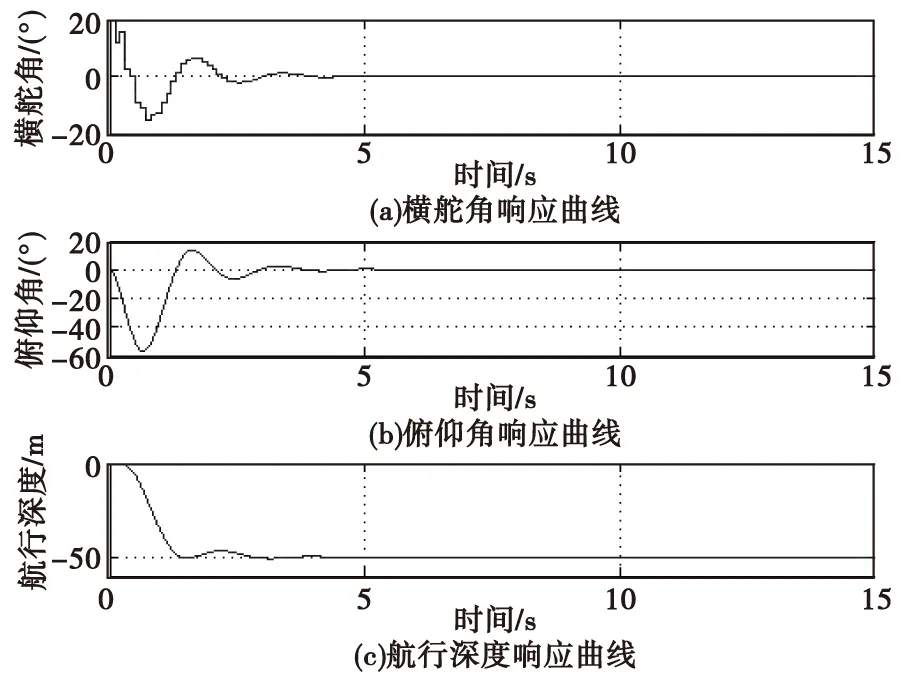
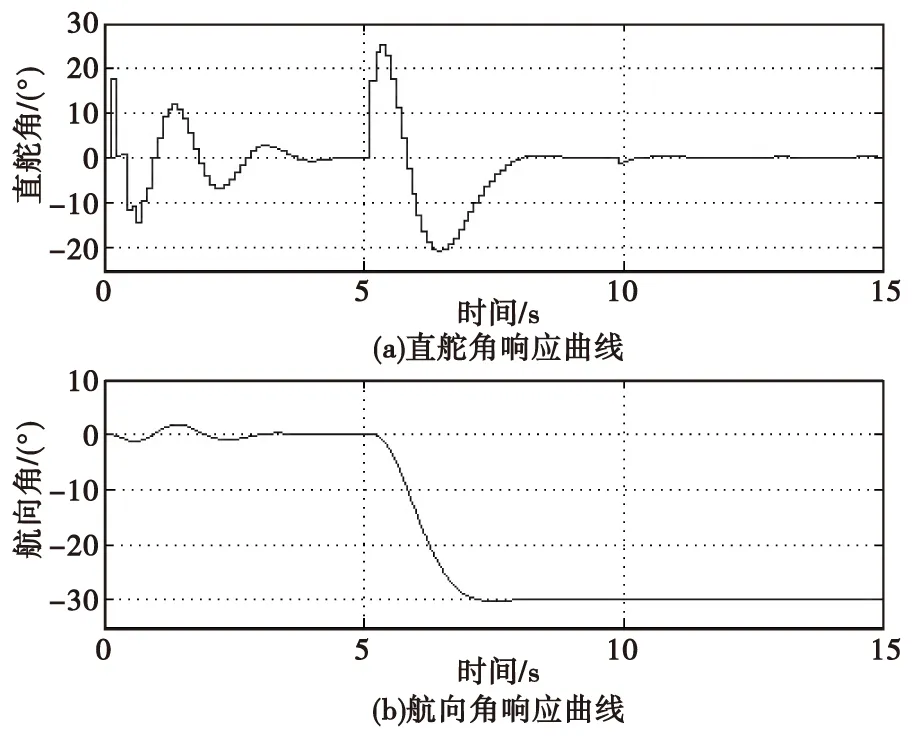
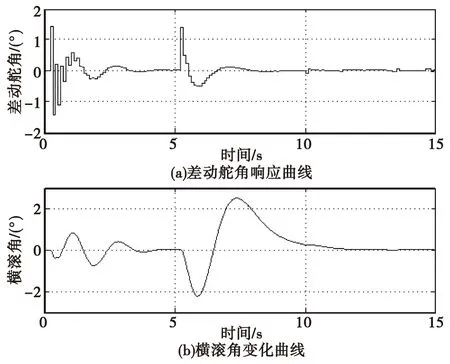
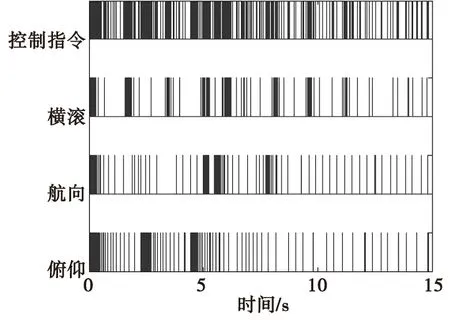
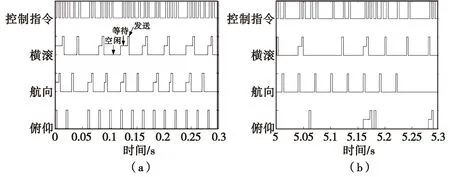
式(6)中,tk≤t 若tk時刻不觸發控制律解算,則控制輸入保持一拍,即 δ(t-τ(t))=δ(tk-1)tk≤t (7) 根據方程(6)對方程(5)進行離散化: x(k+1)=Φ(h)x(k)+Γ0(h,τk)u(k)+ (8) (9) 式(9)中,I為合適維數的單位陣。 類似地,根據方程(7)離散化(5), 可得: (10) 由于τk∈[0,h]是不確定的,為方便魯棒控制器設計,對其進行如下變換[8]: Γ0(h,τk),Γ1(h,τk)可以被寫為: (11) (12) 將式(11)、式(12)代入式(9),則Φa1,Γa1可以重寫為: 顯然,FT(τk)F(τk)≤I。 于是,方程(4)可以被重寫為: (13) 采用如下二次型觸發條件, (14) 上述條件的物理意義是,tk時刻AUV狀態誤差的加權歐幾里得范數相對于tk-1時刻是增大的,控制性能變差,需要向自動駕駛儀傳送當前狀態測量值并更新控制律,以使系統跟隨設定值。 當AUV網絡中有多個控制回路滿足式(14)所示的觸發條件時,需要仲裁當前時刻獲得網絡訪問權限的回路。我們采用如式(15)所示的動態調度策略,該策略使單位時間內控制性能最壞的控制回路獲得總線訪問權限。 (15) 式(15)中,hi,σi(k)分別表示控制回路i的采樣周期以及如式(14)所示的狀態誤差加權歐幾里得范數。特別地,Δ(k)=0表示當前時刻沒有控制回路需要發送數據。 在式(14)所示的事件觸發條件下,離散系統式(9)、式(10)所示用如下參數不確定切換系統表示: (16) 根據文獻[11]中的定理1,可以通過求解LMIs式(17)、式(18)得到狀態反饋控制律δ(k)=Kz(k)和事件觸發條件(此處即矩陣Q) 使得系統式(16)全局漸進穩定,即: 如果存在正定對稱陣X,Y,R,Q2,標量ε>0以及合適維數的矩陣W,使得如下LMIs可行, (17) (18) 則使得系統式(16)全局漸進穩定的控制律為δ(k)=Kz(k)=WX-1z(k),相應的事件觸發條件為Q=diag(Q1,-Q2)=diag(R-1,-Q2)。 驗證實驗用AUV網絡化控制系統拓撲結構如圖1所示,包含俯仰、偏航和橫滾三個控制回路,傳感器分布式的采集AUV運動狀態,通過網絡傳輸給共享控制器節點,解算控制律,并通過網絡發送控制指令給舵機控制器。仿真實驗平臺使用基于Matlab的網絡化實時控制系統仿真工具包TrueTime[12]搭建。 根據AUV運動的控制性能可以確定出采樣傳輸周期的上限,而采樣傳輸周期的下限一般受限于網絡的帶寬調度策略。假設研究的控制回路中采樣數據包和控制命令數據包長度之和為640 b,當網絡傳輸速率為100 Kb/s時,這些數據包的傳輸時間(ci)為6.4 ms。選擇采樣數據傳輸周期為h1=20 ms,h2=30 ms,h3=40 ms,使其符合RM實時調度策略的可調度性約束條件。 RM實時調度策略的可調度性約束保證了數據包傳輸延遲不大于傳感器的采樣周期。特別地,我們研究的系統中傳感器按采樣周期測量系統狀態,但是否需要通過網絡向控制器節點傳送該狀態卻是由式(14)所示的事件觸發條件決定的。我們期望提出的事件觸發魯棒控制策略,能夠使系統在產生較小的網絡負載下獲得滿意的控制性能。 在15 km航速下,AUV先從水平面下潛到-50 m,再調整航向角從0°到-30°,參與仿真實驗的AUV模型采用方程組(1)六自由度空間運動方程,實驗中未考慮水流干擾。圖2—圖4分別展示了通過求解LMIs式(17)、式(18)得到的可行控制增益和事件觸發條件下,AUV網絡中各控制回路的響應。由于六自由度空間運動方程表征的AUV縱向運動和側向運動是存在耦合的,而由于有較好的橫滾角控制,將方程分解、簡化后基于式(2)—式(4)設計的控制律在事件觸發執行條件下依然有較為滿意的控制效果。事件驅動下的AUV網絡數據包傳送如圖5所示,其中各控制回路中的航向、姿態、深度傳感器節點根據事件觸發條件(14)和調度策略(15)確定訪問網絡的優先級,向自動駕駛儀發送采樣數據,自動駕駛儀接收新的采樣數據觸發控制律計算并繼承當前相應傳感器數據包的優先級向執行舵機發送更新的控制量。當t∈[0.0,5.0]s,航行器根據定深設定值下潛,俯仰控制回路內的數據發送及控制律解算被頻繁觸發,而最小觸發間隔受到實時調度策略的可調度性約束條件的限制,從而避免Zeno現象可能引起的網絡阻塞,使數據包可調度。而由于縱向運動與側向運動的耦合,爬潛運動使航向和橫滾出現擾動,觸發相關通道的數據發送和控制解算,但平均觸發頻率,遠低于俯仰回路;當t∈[5.0,10.0]s,此時航行器深度已經穩定到設定值,數據發送觸發頻率下降。航行器根據設定航向角開始轉向,航向控制回路內的數據發送及控制律解算被頻繁觸發,同時轉向運動會使航行器在水動力的作用下產生橫滾擾動,因此,橫滾控制回路內的數據發送也被頻繁觸發;當t∈[10.0,15.0]s,航行器在設定深度和航向上穩定航行,各控制回路的數據傳送觸發頻率在事件觸發條件的作用下都降為較低水平。圖6展示了當存在多個控制回路同時被觸發訪問網絡時的數據包傳送優先級調度情況。顯然,當t∈[0.0,0.3]s時(圖6(a)),航行器處于定深航行階段,定深狀態誤差及其變化最大,根據調度策略式(15),其控制回路中的數據獲得最高的網絡訪問優先權,即數據包一旦就緒,立即被調度發送而無需等待。當t∈[5.0,5.3]s時(圖6(b)),航行器航行深度已經趨于穩定,航行器處在水平轉向過程,因此,航向和橫滾回路的數據包根據調度策略獲得比俯仰回路更高的傳送優先級。 圖2 航行器定深響應Fig.2 The depth response of the vehicle 圖3 航行器航向響應Fig.3 Vehicle course response 圖4 航行器橫滾控制響應Fig.4 Vehicle roll control response 圖5 AUV網絡數據包傳送Fig.5 AUV Network packet transmission 圖6 網絡數據包傳送優先級調度Fig.6 Network packet transmission priority scheduling 實驗結果顯示,相比于時間驅動的控制方法,事件驅動下,控制回路根據事件觸發條件,可以動態地調節采樣數據包發送間隔,誤差大時,發送頻率增大,系統趨于穩定時,則減小發送頻率,因此可以占用較少的帶寬資源取得滿意的控制性能。 本文針對帶寬資源受限的AUV網絡化控制系統,提出一種考慮不確定延遲的事件觸發魯棒控制策略。首先以離散參數不確定切換系統描述事件驅動AUV網絡化控制系統,然后通過求解線性矩陣不等式得到使系統各回路穩定的魯棒控制策略。仿真實驗表明,本文提出的控制策略可以使AUV縱向、橫向控制在存在不確定網絡延遲和事件觸發數據包發送機制下依然保持穩定,且由于本策略可以根據系統誤差動態調節網絡發包間隔,因此可以占用較少的帶寬資源取得令人滿意的控制性能。
Γ1(h,τk)δ(k-1)




3 事件觸發魯棒控制策略
3.1 事件觸發條件與調度
3.2 事件觸發魯棒控制策略設計
4 仿真實驗
5 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20教學考試(高考化學)(2021年2期)2021-05-30 06:15:52軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58中學生數理化·高一版(2020年3期)2020-04-21 08:03:20中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50裝備制造技術(2019年12期)2019-12-25 03:06:46小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10中國洗滌用品工業(2019年4期)2019-05-11 09:27:34數學大世界(2018年1期)2018-04-12 05:39:14
