基于動態控制的雙足移動機器人自平衡研究
2019-03-15 13:31:28王治平黎斌張軒龍
電腦知識與技術 2019年2期
王治平 黎斌 張軒龍
摘要:當下,移動機器人的運用愈來愈為廣泛,由最初再現式機器人發展至自主型機器人,再進入到當前智能機器人,幾乎每個領域都能夠發現它的存在,對于它的研究也愈來愈受到學術界所關注。本論文簡要詮釋動態控制理論,闡述自平衡機器人工作原理,分析自平衡的實現及其系統模型的建構。在此基礎上,展開動態控制下雙足移動機器人自平衡的設計與制作,包括電機方案、機器人身體和附件、電源方案、芯片運作方案以及機器人動態控制的計算方法等內容。
關鍵詞:動態控制;雙足移動;機器人;自平衡
中圖分類號:TP311? ? ? 文獻標識碼:A? ? ? 文章編號:1009-3044(2019)02-0187-02
早在20世紀80年代的后期,機器人的相關技術愈來愈為完善化,其把電子技術、機構學、計算機技術、控制理論、傳感器技術以及人工智能化等有關的知識加以整合,同時又有意識地汲取諸如能源科學以及材料其他領域學科最近的研究成果,從而產生了獨具特色的機器人學。雙足移動機器人屬于移動機器人類型中的一種,其具備如下的主要優點:平穩的運作狀態、較高的能量的使用率、簡易化的結構、突出的適應環境性等。對于這一類機器人的探究愈來愈變成研究移動機器人的一個焦點,可見,無論是有關它的理論方面的價值還是實用性價值都是非常明顯的。在最近的幾年中,雙足移動自平衡式機器人的相關課題研究日益發展,從最初的美國、法國、日本以及瑞士等國家快速地在全球蔓延開來。例如,雙足自平衡式機器人的設想源起于日本的專家山藤高橋(1986),他所設計出的是一種新型的智能化站立型機器人。此后,實驗原型機紛紛構建起來。同時,就雙足移動機器人自平衡研究領域內所暴露的一些問題,針對性地提出了若干解決的對策,且就原型機智能化的平衡性和運動特征展開證實。本論文基于動態控制的相關理論來研究雙足移動機器人的自平衡內容。
1 動態控制基本理論概述
動態控制指的是項目在構建與實施時,因為時空發生了主客觀的改變原因而展開的對項目進行管理的方法論。因為項目實施時,主客觀的條件改變呈現出絕對性,而不變則呈現出相對性。在實施項目時,平衡具有暫時性,而非平衡性則具有永恒性。因而,在實施項目時,須基于改變了的狀況來實時地掌控項目的目標及其進度。動態控制的原理主要有:(1)對項目的目標做好動態控制的預備性工作,分解項目所設立的目標(包括質量、投資、進度、成本等),從而界定應用在掌控目標控制規劃數值;(2)動態地跟蹤與控制項目的具體實施進度。其又包括如下的幾要素:①搜集項目對應的目標的現實數值,包括現實的成本、施工的進展以及現實施工的質量等方面;②定期的比對并分析項目的現實值以及計劃值,若出現偏差情況,須及時地采納糾偏的對策及時地調整。就本論文而言,動態控制主要指的是在設計雙足移動機器人自平衡時進行實時地控制,若出現設計上的偏差現象時,及時地通過相關的程序加以控制。
2 動態控制下雙足移動機器人自平衡模型建構
2.1 自平衡機器人工作原理
雙足移動自平衡機器人的工作原理如下:將全部成對式的組件均等地放置于機器人兩邊,全部單一型的組件疊置于其中心面處,目的在于確保結構的對稱性;另外,機器人的質量關鍵體現于下板與頂端,從容而確保控制的容易性。雙足自平衡機器人側面的結構中,其機器人身體主體部分基于電機的軸心線這個中心往后振動,如果基于機器人的機身和地面垂直向度等于0度,那么機器人身體所能夠搖擺的范圍在-47°~4°。左右雙足依次通過2個直流的伺服電機加以驅動,基于電機的這個軸心且當作中心進行360°的前后轉動。若其并沒有受到控制,那么,機器人身體無論向前或向后傾斜,左右足均處于靜止狀態,也即機器人身向前或向后搖擺和雙足的轉動處于相互獨立的狀態,從而加大了控制機器人的難度。因而,自平衡控制據此提出的基本理念為:若對傾斜角度進行測試的傳感器測試到的機器人出現傾斜現象時,控制體系基于檢測所獲取傾角出現單個相應的信號,經由電機驅動對應的雙足來控制機器人即將傾倒的方向,從而確保機器人處于動態的平衡狀態之中。
2.2 自平衡的實現
基于2.1的工作原理可知,當雙足移動機器人受到控制時,它的機器人身體狀態改變會導致機器人身體出現靜止、前傾與后仰等3類運動狀態。若受到準確地控制,那么機器人身體即可以維持平衡的狀態,從而達到自平衡的實現:1)前傾:即機器人身的重心往前,那么機器人身體也即往前傾斜,驅動的雙足向前移動,從而確保機器人的平衡性。2)靜止:雙足移動機器人身體的重心處在電機的軸心線正上方處,此時即達到動態的平衡靜止,無須任何的控制。3)后仰:即機器人身的重心往后,那么,機器人身體也同步往后偏斜,驅動的雙足往后移動,從而確保機器人的平衡性。
總之,雙足移動機器人自平衡控制的主要實現方式為:在測試傾斜角度對應的傳感器測試到機器人身體出現傾斜時,動態控制體系即會基于所檢測的傾角出現單個對應的力矩,借助于控制機器人的電機驅動2只腳往人身所要傾倒的方向進行運動,從而確保機器人自平衡的實現。
2.3 自平衡機器人的系統模型
雙足移動機器人的自平衡系統模型具有強耦合性、多變量、高階以及非線性的特征,且處于非穩定的狀態之中。如果采納的是實驗式建模法則難度較大,因而棄之不用采用。而至于機理式模型的建構,如果忽視部分次要的因素以及對系統加以精簡處理,從而可將其視作簡化和理想化假設,簡化后的系統可被視為一個具有典型性的動力學函數式,達到理想化的系統模型的建構:(1)就機器人身而言,因為理論研究時僅需分析的是機器人身的質量即可,因而,把安裝于機器人身之內與其外的組件,均抽象為整體的一部分,進而將機器人身假定為質量布局均勻的機體,至于擺桿則固定于機器人身體的頂端,和水平面處的細桿保持垂直的狀態,因而,機器人身與豎桿能夠被進一步看作能夠圍繞著轉軸進行旋轉的一個剛性的振動體;(2)把雙足看作一個外形與質量布局均勻的圓盤體。
3 動態控制下雙足移動機器人自平衡的設計與制作
3.1 電機方案
因為機器人身尺寸的設計、電機的掌控以及驅動方面的設計等都應基于確定了的電機方案這個基礎,因而,須先界定好電機方案。當下有關電機的方案主要采納的是把2個無刷直流電機或的步進的電機單獨地安置于機器人身之中的模式。本論文主要分析前者:它是一類斷續式運作的同步電機,其受到脈沖信號的控制,并把控制相關的信號轉換成階躍式角位移,也就是每一次傳遞單個的脈沖,電機即旋轉對應的角度。因此,步進電機轉軸的轉角或者是轉速和所施壓的脈沖數存在著正比的關系,只需將控制脈沖頻率加以改變之后,即能夠就達到對其轉速加以調控的目的,且可以達到迅速開啟、制動以及反轉的效果。當其受到小步距角的控制時,能夠使其處于低速度而又平穩的運作狀態中。步進電機處于平穩運作狀態僅和脈沖的頻率存在著聯系,而與電壓以及負載并無聯,也不會受到氣壓、震蕩以及外界溫度等因素的影響。另外,它在控制方面還有顯著的優點,即因為其每次選擇一周均有固定且單獨的步數,此表明即便偶然發生了步距的誤差,亦不會把誤差進行積累。因而,它較為適用于開環體系。
3.2 機器人體和附件
機器人身體的核心功能包括:載物箱、傳感器、蓄電池以及控制電路板的載體;連接中軸左右不同兩只腳;其頂端的平面視為腳踏板。顧及被當作實驗性的一種機器人身體的樣式類型,也許需常態性地對安置于機身的零組件以及電路加以修改、拆裝以及接線等一系列的操控,本論文把機身設計成框架式的構造,其框架的材料第一個條件是具備一定的剛度,可以承載充足的重量,同時也應確保機身的重量盡量地輕。因而,挑選厚度為 5mm規格的角鋁當作機身四周的框架素材以及同樣厚度的鋁條當作不同平面的中間性隔條,從而可以顧及剛度以及機身重量的需求。機身的高度主要決定于機器人雙足的垂直高度,因為本論文所選定的雙足垂直高度是為420mm,因而它的足心離開足底部的高度h是210mm,機身底端和地面的間距h1為50mm,機身的電機軸安置孔間距機身頂端h2為40mm,據此可推出機身高度的函數式如下所示:
H = (h + h2 ) ? h1 = (210 + 40) ? 50 = 200mm? ? ? ?(1)
其中,上述式子(1)中的H所表示的是機身的高度;R表示雙足的半徑;h1表示機身底端和地面的間距,h2所表示的是機身電機軸的安置孔和機身頂端的間距。
3.3 電源方案
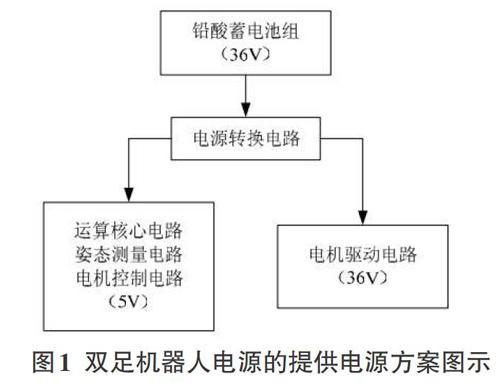
雙足移動自平衡機器人所采用的電源方案為鉛酸蓄電池。因為本論文所設計的移動機器人自身的重量要比普通的電動型自行車輕,速度一般低于15km/h ,也不會運用在遠距離的行駛領域,因而采納的是36V的供電方案,通過串聯3節規格為12V/10Ah的鉛酸蓄電池構成電源。控制的部分所采用的是5V的供電電源,因而安置單個電源的提供板塊,以依次替控制部分以及電機所提供的5V以及36V的電源,可參見下圖1所示:
3.4 芯片運作方案
芯片運作方案所采用的是PIC18F4580加以實施,其和雙足移動自平衡機器人的大腦相當,主要負擔的職責工作任務為:控制好電機起停環節,往電機的控制板塊傳遞加速或是減速的控制信號,接納電機傳輸的Hall信號并展開機器人移動速度的運算,且經由RS-232的串口往PC傳送機器人速度的相關信息從而提供儲存與研究。就雙足自平衡移動機器人而言,PIC18F4580也應用在接納機身平衡狀態的信息,據此展開自平衡的計算。設計時,還把通過PIC18F4580往電機的控制板塊傳遞電機的正反轉以及制動的信息。在確定好計算芯片的方案以后,設計并制作PIC單片機的電路板,將其當作系統的計算軸心。
3.5 機器人動態控制的計算方法
機器人動態控制算法是控制的重點。本論文采納的是查表法來展開計算,即基于二維模糊控制器控制的相關規則,設計出如下條件的語句模式:
If? [E=Ai]and [EC=Bj] then [U=Cij]([i=1,2,...,6];[j=1,2,...,6])
(2)
其中,上述式子(2)中的[Ai],[Bj]與[Cij]所表示的是界定于誤差[E]、誤差的改變率[EC]、以及控制量U對應的論域[X、Y、Z]模糊的子集。
根據36條效應的準則,基于[Ai],[Bj]與[Cij]即推出:
[Rl=Ai×Bj×Cij] ([l=1,2,...,6];[i=1,2,...,6];[j=1,2,...,6])
(3)
將Rl合并之后,即能夠獲得整體性的模糊關聯性式子:
[R=i,jAi×Bj×Cij]? ? ? ? ? ? ? ? ? ? ? ?(4)
再通過采樣獲取方位的偏差Ei和偏差的改變率ECj,據此獲得輸出量,推出相應參量的控制量Uij的式子為:
[Uij=Ei×ECj×R]? ? ? ? ? ? ? ? ? ? ? ? (5)
4 結語
本論文簡單地闡述了動態控制的相關理論,然后基于該理論對雙足移動機器人自平衡展開了相關的研究,闡述自平衡機器人工作原理,自平衡的實現及其系統模型的建構。在構建好相關的模型體系的基礎上,展開動態控制下雙足移動機器人自平衡的設計與制作。由于該類型的機器人體現出體積較小以及靈活性等優點,從而適用于危險與狹窄的環境中工作,從而具備良好的運用發展前景。
參考文獻:
[1] 李磊,葉濤,譚民,等.移動機器人技術研究現狀與未來[J].機器人,2002(7).
[2] 黃永志,陳衛東.兩輪移動機器人運動控制系統的設計與實現[J].機器人,2004,26(11):40-44.
[3] 徐國華,譚民.移動機器人的發展現狀及其趨勢[J].機器人技術與應用,2001,24(3):7-14.
