基于云計算平臺的室內環境監測系統設計與實現*
2019-03-05 08:15:22劉雄飛賴思敏
傳感器與微系統 2019年3期
劉雄飛, 聶 偉, 陳 浩, 賴思敏
(1.中南大學 物理與電子學院,湖南 長沙 410083;2.湖南恒茂高科股份有限公司,湖南 長沙 410205)
0 引 言
室內環境的健康舒適和安全等方面因素得到了很多國家和地區的關注,具有很大的研究價值。文獻[1]通過對室內熱環境舒適度評價及有害氣體濃度預警,設計并實現了室內環境監測系統。文獻[2]運用無線傳感網絡和通用分組無線業務(general packet radio service,GPRS)無線通信技術對室內的溫度、甲醛和CO進行監測。文獻[3]通過ZigBee技術和WiFi技術相結合,完成了一種基于物聯網的室內環境監測系統。但目前對室內環境監測及評價研究大都只是針對于室內單一環境因素,不足之處在于對室內環境的監測及舒適性評估存在一定的局限性。
本文綜合考慮聲、光、熱環境和室內空氣質量對人的影響,通過物聯網技術和云計算平臺,將室內各環境相結合,得到室內環境綜合評價結果,極大地提高了室內環境監測系統的準確性和有效性。
1 室內環境監測系統設計
該系統由數據采集子系統和云計算處理平臺兩部分組成。采集子系統使用CC2530作為控制單元,針對室內聲、光、熱環境及空氣品質監測分別采用對應的傳感器組:溫濕度傳感器采用DHT11,光照度傳感器選用GY—485—44009,噪聲模塊選用AS11—X,甲醛濃度檢測模塊選用DS—HCHO,總揮發性有機化合物(total volatile organic compound,TVOC)濃度檢測模塊選用KQM2801A,CO2濃度檢測傳感器選用S8—0053。傳感器組在采集同時對應編號處理,以便對不同采集點進行識別,采集數據通過無線傳感網絡存儲到云服務器數據庫,以便云計算平臺進行數據處理,云計算平臺通過神經網絡和D-S(Dempster-Shafer)證據理論兩級數據融合對室內環境進行綜合評價并提供Web服務。
2 室內環境舒適度評價描述
2.1 室內熱環境舒適度評價
本文對室內熱環境描述采用PMV-PDD指標[4]。PMV指標主要用于熱環境舒適度評價,而PDD指標表示人們對熱環境的不滿意系數,根據PMV-PDD模型計算以及ISO標準,對室內熱環境可以按照表1進行評估。
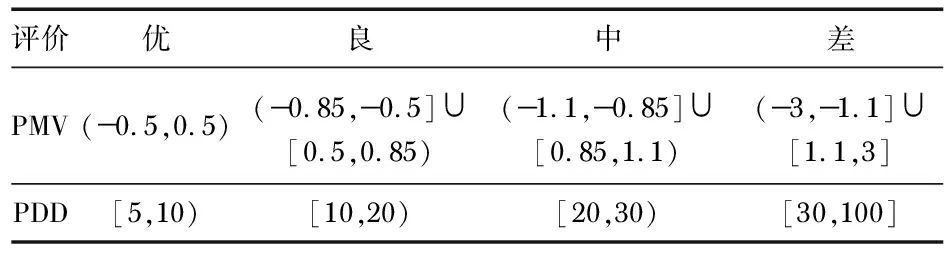
表1 室內熱環境舒適度決策表
2.2 室內光環境舒適度評價
對于室內光環境舒適度通過LPDD來評價,表示人們對照明光環境的滿意情況[5]。根據韋伯—費昔勒定律,在沒有強光閃爍的環境中,光環境舒適度可以用該環境中人眼光刺激LPMV指標來表示。LPMV可以表示為
LPMV=f(E,Ra,Tcp)
(1)
式中E為平均照度,Ra為一般顯色指數,Tcp為色光相關色溫。而光環境滿意率LPPD與LPMV存在如下關系
(2)
式中C為比例常數,n為常數。根據GBJ113—90與GB50034—2004,對室內光環境舒適度劃分如表2所示。
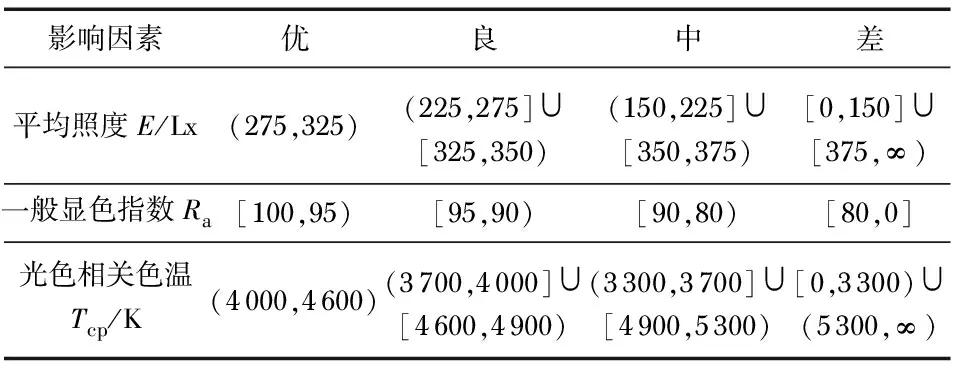
表2 室內光環境舒適度決策表
2.3 室內聲環境舒適度評價
目前對噪聲的普遍評價是根據噪音的客觀因素,僅僅根據噪聲分貝的大小來評價噪聲的影響。本文從噪聲對人的影響四個維度來考慮,分別是噪聲影響正常交流、影響思考、影響休息以及噪聲導致人們情緒的變化。通過噪聲分貝根據GB3096—2008《聲環境質量標準》和GB/T50108-2010《民用建筑噪聲設計規范》對室內聲環境舒適度決策如表3所示。
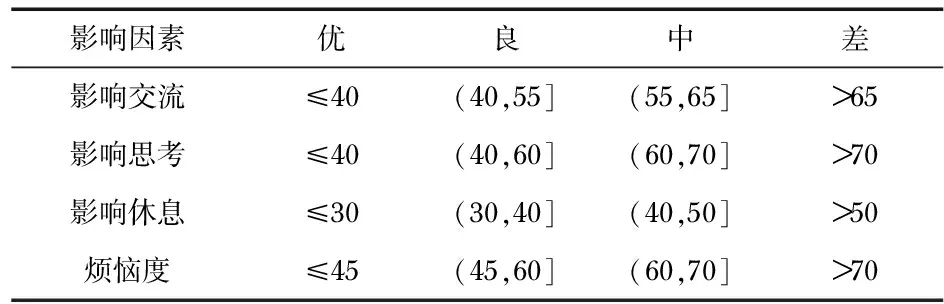
表3 室內聲環境決策表 dB
2.4 室內空氣品質評價
大多對室內環境監測研究中,基本都包含了室內空氣品質的實時監測。本文通過傳感器檢測室內CO2濃度、甲醛濃度和TVOC濃度來評價室內空氣質量[6],根據國家室內空氣質量標準GB/T18883—2002,對室內空氣品質的評價如表4所示。
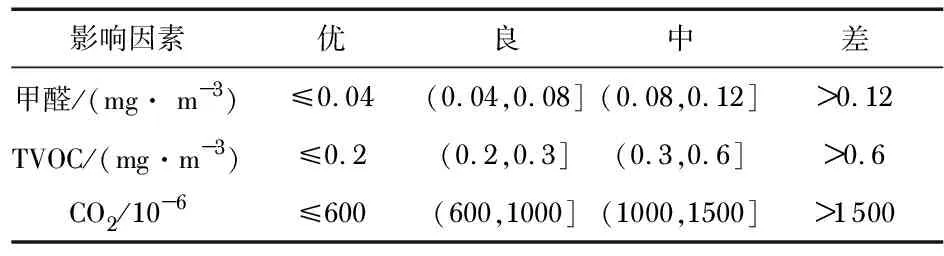
表4 室內聲環境舒適度決策表
3 云計算平臺融合算法
云計算平臺的處理首先通過神經網絡對室內各環境采集的數據進行特征級融合,然而神經網絡在預測過程中容易陷入局部極小點,存在識別度不足和準確性低等問題,D-S證據理論可以將證據之間微弱的差別進行累加,當這些差別累積到一定程度時就很方便進行區分,從而提高評價的準確率。本文通過D-S證據理論對特征級融合結果進行分析決策判斷,得到室內環境的綜合舒適度評價,云計算平臺的融合模型如圖1所示。
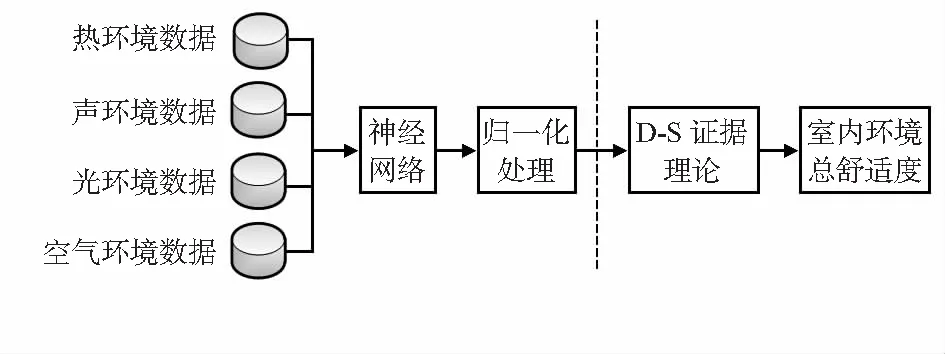
圖1 融合模型
3.1 基于神經網絡的特征級融合算法
根據熱舒適度指標PMV計算公式可知,其計算結果和輸入參數間存在復雜的非線性關系,計算PMV值的關鍵是求解tcl,而tcl的計算又依賴于hc,而hc的求解又依賴于tcl,其運算過程存在迭代嵌套。反向傳播(back propagation,BP)神經網絡在很多領域都有廣泛的應用,但由于BP神經網絡采用基于梯度下降作為其學習算法,容易陷入局部極小值問題。而遺傳算法作為一種全局優化搜索方法,容易得到全局最優解,通過遺傳算法對BP網絡的初始權值和閾值進行優化。因此將遺傳算法與BP神經網絡結合,可以避免各自存在的問題,從而能夠達到快速收斂[7],算法流程如圖2所示。

圖2 遺傳神經網絡算法流程
通過遺傳算法進行優化得到BP網絡的初始權值和閾值,再通過BP算法進行學習。對于室內熱環境評價的神經網絡模型,其輸入層節點數為6個,即影響PMV指標的6個因素,其輸出為對應的PMV和PDD值。實驗時,將訓練精度設置為10-3,BP神經網絡通過89次滿足預期要求,而遺傳算法優化的神經網絡在滿足同等條件下僅需12次就達到了設定精度要求,對比可知,通過遺傳算法優化的BP神經網絡極大提高了BP網絡的收斂速度,其訓練誤差對比如圖3所示。
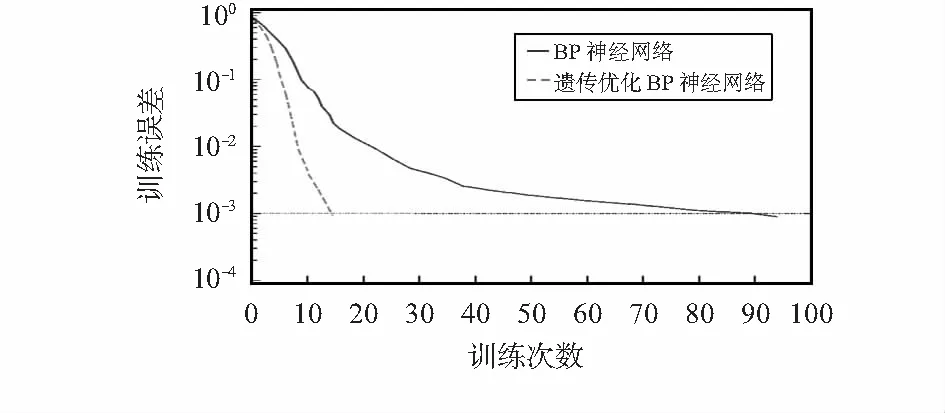
圖3 訓練誤差對比
對于室內聲、光環境和空氣品質采用BP神經網絡。室內光環境中輸入層節點數為3,室內聲環境的輸入層節點為4,空氣品質的輸入層節點為4,其輸出為對應評價的4個等級。為了避免在D-S證據理論進行決策級融合時由于BPA為0而引起證據沖突問題,在測試中將輸出定義為0.1和0.9,而非傳統的0和1。將網絡的目標誤差E設為10-3,室內光環境、聲環境和空氣品質的訓練模型分別通過114,169,54次學習,達到設定精度。根據訓練好的網絡模型,通過傳感器采集的樣本數據進行仿真。室內熱、光、聲環境及空氣品質融合的舒適度評價分別如表5~表8所示。
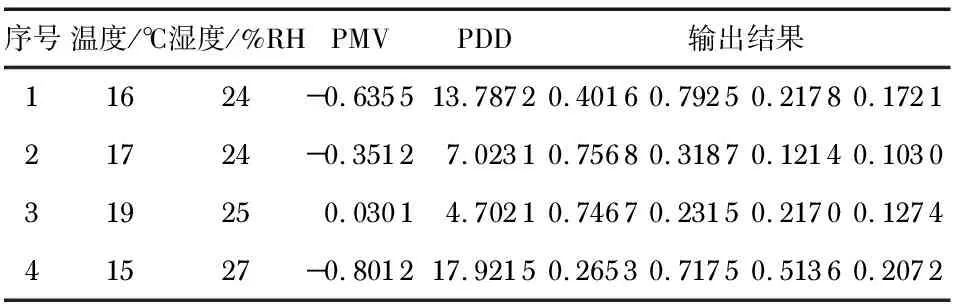
表5 室內熱環境融合結果
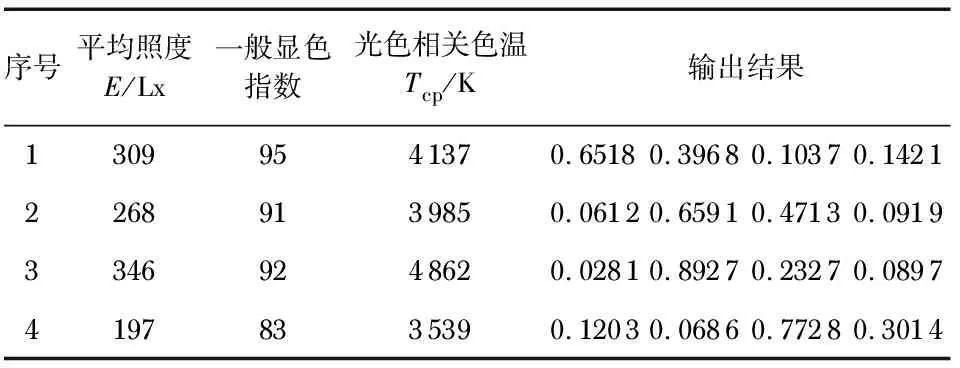
表6 室內光環境融合結果

表8 室內空氣品質融合結果
3.2 基于D-S證據理論的決策級融合算法
通過特征級融合得到室內熱、光、聲環境及空氣品質的舒適度評價,決策級融合采用D-S證據理論算法,將特征級融合后的結果作為D-S證據理論的證據,進行證據組合,得到最終融合結果。經D-S證據理論進行融合時,其證據必須經過歸一化處理。由于室內熱環境的特征融合輸出不同于室內光、聲環境和空氣品質的輸出,需要對其處理以便于決策級融合。根據隸屬度函數計算得出其相應的隸屬度。再根據式(3)進行歸一化處理
(3)
本文的識別框架Θ={優,良,中,差}。將各環境舒適度對應的4個等級的隸屬度作為基本概率分配函數BPA。根據多個證據的組合規則
(4)
式中k為證據之間的沖突水平。將特征級融合的輸出結果經歸一化處理為決策級融合做準備,采用D-S證據理論按照多個證據的組合規則進行證據組合,從而得到室內環境的綜合舒適度評價,對上述四組特征級融合數據進行決策級融合,其融合結果如表9所示。
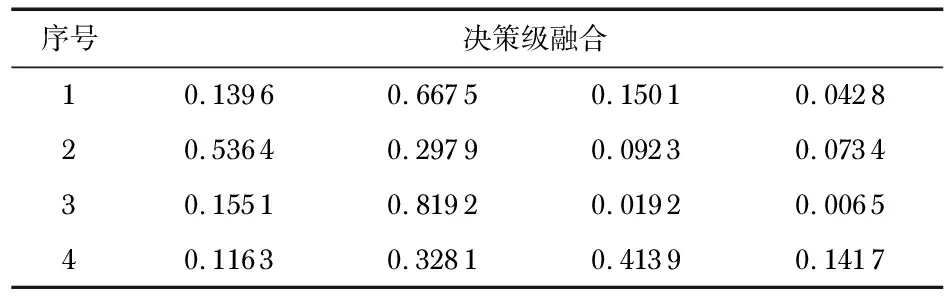
表9 決策級融合結果
4 系統測試
本文實驗在研究樓的4個實驗室分別布置了4組傳感器進行數據采集。實驗環境為冬季室內,一般人體為坐下休息狀態,熱環境參數中,取M為58.2 W/m2,室內空氣流速為0.1 m/s,服裝熱阻Icl取1.0 Clo,平均輻射溫度為室溫。傳感器組以1次/min速率采樣并存入數據庫,經過采用上述算法的云計算平臺進行數據分析處理,通過http請求訪問監測平臺頁面如圖4所示,該系統經過兩級融合模型對室內各環境進行綜合評價,其評價結果更為可靠。

圖4 監測平臺界面
5 結 論
本文通過室內環境監測和舒適度融合評估問題,通過物聯網技術和云計算平臺開發了一種使用方便、成本低、穩定的室內環境監測系統。在云計算處理平臺實現了一種神經網絡與D-S證據理論相結合的兩級融合評價模型,將各環境相結合進行綜合評價,很好地克服了在傳統室內環境監測評估中,由于監測評估環境單一而產生的局限性和不確定性,提高了室內環境評價的可靠性和容錯能力,具有很好的實用性和市場價值。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
紡織科學研究(2021年9期)2021-10-14 08:52:12
中老年保健(2021年12期)2021-08-24 03:30:40
中老年保健(2021年11期)2021-08-22 03:15:44
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
鐵道通信信號(2020年1期)2020-09-21 08:55:16
現代出版(2020年3期)2020-06-20 07:10:34
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
