基于三維有限元的混合勵磁爪極電機仿真研究
2019-02-25 02:09:28姚舜才王曉丹
微特電機 2019年1期
杜 飛,姚舜才,王曉丹,安 坤
(中北大學(xué),太原 030051)
0 引 言
爪極電機由于轉(zhuǎn)子部分做成鳥爪狀,磁極相互交錯形成而得名。由于其結(jié)構(gòu)相對簡單,制造成本低廉,被廣泛應(yīng)用于各種場合,尤其是運用于汽車發(fā)電機時,更具有優(yōu)勢[1]。隨著現(xiàn)代汽車工業(yè)的發(fā)展,汽車上配備的電子產(chǎn)品增多,但是汽車電池容量沒有明顯增強[2],如何獲得高效率電機是現(xiàn)代車用發(fā)電機的一個關(guān)鍵性問題。
常用的爪極發(fā)電機有兩種勵磁方式:電勵磁和永磁勵磁。電勵磁在兩爪極的軛部放置一個勵磁線圈形成勵磁磁場將兩爪極磁化為N,S兩極。電勵磁爪極電機制造成本較低,磁場易調(diào)節(jié),但同時故障率高,損耗較大[3]。永磁爪極電機一般兩爪極采用相同永磁材料,但磁化為不同磁極,此類電機結(jié)構(gòu)簡單,能提高電機功率密度,但磁場穩(wěn)定難調(diào),滅磁困難[4]。
使用混合勵磁方式是爪極電機研究的一個重點方向,根據(jù)永磁體安放的位置不同,可以實現(xiàn)不同的混合勵磁方式。在爪極電機的兩爪極交錯的空隙之間放入切向充磁的永磁體,可以實現(xiàn)并聯(lián)混合勵磁[5],永磁體的安放主要解決,爪極電機極間漏磁現(xiàn)象。爪極電機軛部與勵磁線圈之間增加軸向充磁的永磁體,可以實現(xiàn)串聯(lián)方式的混合勵磁[6],永磁體的安放主要解決氣隙磁場的調(diào)節(jié)。另外,還有一種在爪極電機磁極根部放入軸向充磁的永磁體,形成并聯(lián)混合勵磁[7],永磁體的安放主要提高了爪極電機端部空間的利用率。
本文研究一種新型并聯(lián)混合勵磁方式,介紹了新型并聯(lián)混合勵磁的勵磁原理與結(jié)構(gòu)特點,使用Ansoft軟件,運用三維有限元法對新型爪極電機進行了建模和電磁仿真。結(jié)果表明,采用新型并聯(lián)混合勵磁方式,在相同勵磁電流條件下,能夠獲得更高的磁場性能,提高了爪極電機的電樞電流,并且可以實現(xiàn)爪極電機氣隙磁場的調(diào)節(jié)。
1 新型爪極電機混合勵磁原理
新型混合勵磁爪極電機主要由定子、兩爪極、永磁體環(huán)、電勵磁線圈和轉(zhuǎn)軸等部件組成。在爪極軛部空間放置電勵磁磁環(huán)實現(xiàn)電勵磁。在兩爪極軛部中間放置一塊永磁體環(huán),與中心軸線成對稱結(jié)構(gòu)。永磁體環(huán)的充磁方向與電勵磁產(chǎn)生的磁場方向一致。
勵磁磁環(huán)通入一定電流后,電機的磁場由電流勵磁磁場和永磁體磁場進行并聯(lián)疊加,形成混合勵磁磁路,主磁路首先由永磁體所處的N極方向,經(jīng)過爪極軛部和爪極部分,進入電機氣隙部分。之后繞經(jīng)定子、定子齒部再次進入氣隙,然后進入相鄰爪極、爪極軛部,最終回到永磁體S極。另外,電勵磁產(chǎn)生的磁路與主磁路重合,不同的是,爪極軛部因為永磁體環(huán)的存在,電勵磁磁路經(jīng)過中間軛部時要穿過永磁體環(huán),其磁路模型如圖1所示。
當(dāng)勵磁磁環(huán)不通入電流時,永磁體可以實現(xiàn)單獨作用,整個電機的磁路全部由永磁勵磁磁場提供,磁場大小和永磁體的性能、尺寸有關(guān)。此時爪極電機可以實現(xiàn)自勵。
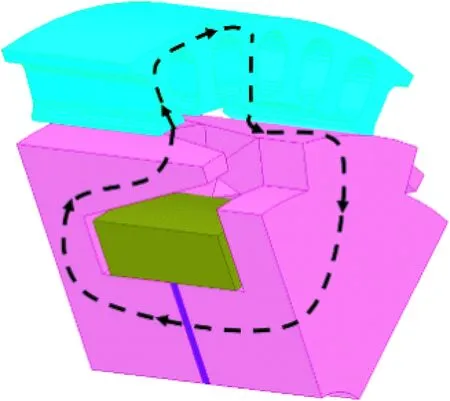
圖1 新型混合勵磁爪極電機磁路模型
通過對新型混合勵磁爪極電機的磁路分析,可以得出,與傳統(tǒng)爪極電機相比,當(dāng)實現(xiàn)混合勵磁時,磁場可以產(chǎn)生疊加效應(yīng),通入相同勵磁電流可以獲得更大的磁場強度;同時也可以根據(jù)電機實際需要進行磁場調(diào)節(jié),特別是在電機高速運行時可以進行弱磁控制。
2 有限元下的爪極電機模型
由于爪極電機兩爪極尖部和根部的極弧系數(shù)和厚度不一致,加上爪極電機的兩極交錯排布,在建立爪極電機的模型時,二維模型已經(jīng)不能代表爪極電機的實際結(jié)構(gòu)[8],因此,對爪極電機的建模采用三維建模方式。同時,三維建模的方式也能提高爪極電機仿真結(jié)果的精度,所求解的結(jié)果比二維模型更為準(zhǔn)確[9-10]。
目前,對電機電磁場方面的研究采用Ansoft Maxwell軟件,但Maxwell在三維建模方面存在不少問題,對于電機曲面的處理能力較弱[11],特別是在處理爪極電機轉(zhuǎn)子爪極方面,已經(jīng)不能滿足需求。因此,為了更準(zhǔn)確建立起爪極電機的模型,采用專業(yè)繪圖軟件Solidworks對爪極電機的轉(zhuǎn)子部分進行建模,而后導(dǎo)入Maxwell;定子、定子繞組、勵磁繞組、轉(zhuǎn)軸和永磁體部分選擇在Maxwell中一體建模。最終將兩部分模型進行整合,形成完整的爪極電機模型。新型混合勵磁爪極電機的主要參數(shù)如表1所示。
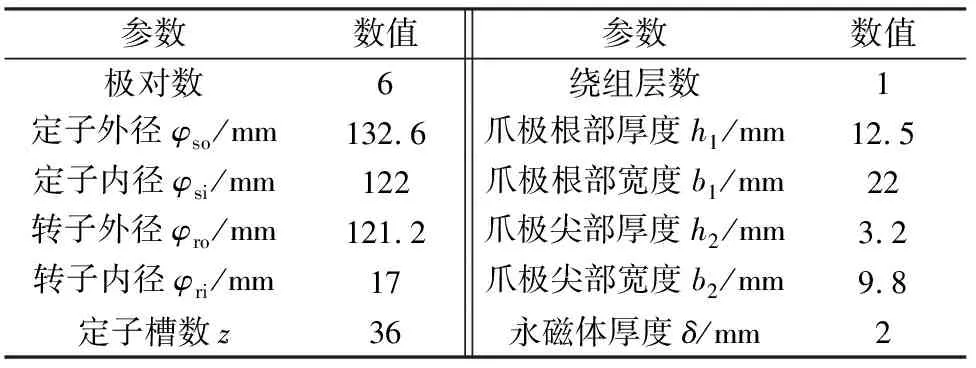
表1 新型混合勵磁爪極電機主要參數(shù)
爪極電機由于結(jié)構(gòu)的特殊性,其模型復(fù)雜,而且研究電磁性能時只能采用三維模型,因此運算時間較長。為簡化模型,根據(jù)新型混合勵磁爪極電機結(jié)構(gòu),建立等效六分之一模型進行研究,具體模型結(jié)構(gòu)如圖2所示。相比于傳統(tǒng)爪極電機,新型混合勵磁爪極電機在爪極軛部增加圓環(huán)形狀永磁體,充磁方向與勵磁磁場方向相同,通過混合勵磁,在不改變磁場大小情況下減小勵磁電流,從而減少勵磁損耗,提高效率。
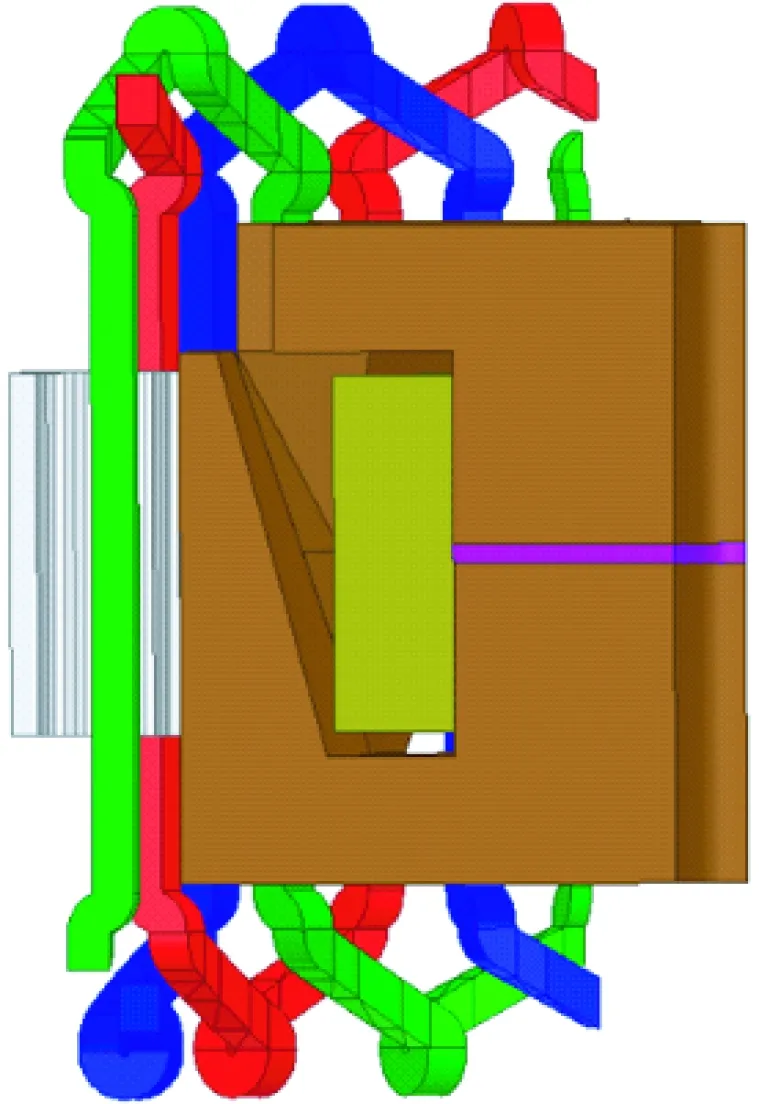
圖2 六分之一電機模型
網(wǎng)格劃分是進行有限元分析的前提,網(wǎng)格的質(zhì)量和網(wǎng)格剖分的類型決定有限元計算的精度。一般來說,高質(zhì)量的離散網(wǎng)格,不僅要求有足夠多的節(jié)點數(shù),同時還必須保證單元網(wǎng)格大小的合理性在使用Maxwell對電機進行電磁場仿真時,剖分網(wǎng)格的稀疏直接關(guān)系到最終求解的準(zhǔn)確性,同時影響整個仿真時間,因此合理進行網(wǎng)格劃分是進行有限元分析的重要步驟[12]。
Ansoft有獨立自主的網(wǎng)格剖分,可以不需要重新設(shè)置。軟件本身自帶的網(wǎng)格剖分有三種設(shè)置方式:On Selection設(shè)置主要作用在剖分模型的邊界上;Inside Selection設(shè)置主要作用在模型邊界層附近,針對模型內(nèi)部;Surface Approximation設(shè)置主要針對邊界是曲線的模型進行剖分[13]。
由于爪極電機所建的模型為部分模型,邊界條件復(fù)雜,因此,在進行網(wǎng)格剖分時,不僅要使用軟件本身的剖分設(shè)置,在一些主要界面,特別是主磁路經(jīng)過不同材料的交界面時,需要手動設(shè)置剖分,進行網(wǎng)格細化。最終得到的網(wǎng)格剖分如圖3所示。
由圖3可知,在主要的接觸位置,將永磁體與爪極,爪極與氣隙,定子與氣隙之間進行了細化工作。其中轉(zhuǎn)子部分共剖分5 581個單元,定子部分共剖分10 893個單元。
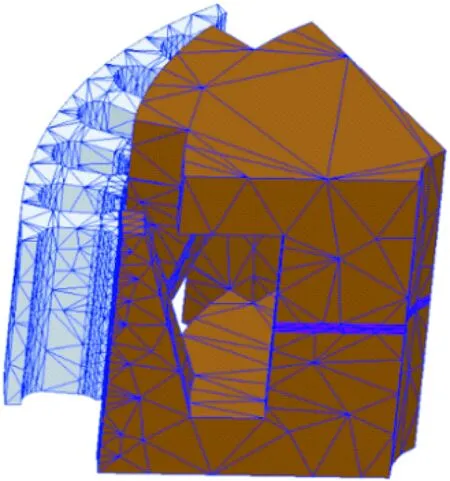
圖3 電機網(wǎng)格剖分圖
3 性能仿真結(jié)果分析
3.1 新型混合勵磁爪極電機性能分析
新型爪極電機由于結(jié)構(gòu)上的變化,因此對電機的仿真研究尤其重要,其中作為發(fā)電機時其額定狀態(tài)的仿真研究尤為重要[14]。因此,圖4給出了新型爪極電機在額定轉(zhuǎn)速3 000 r/min,勵磁電流5.4 A時的定子和轉(zhuǎn)子的磁力線云圖。
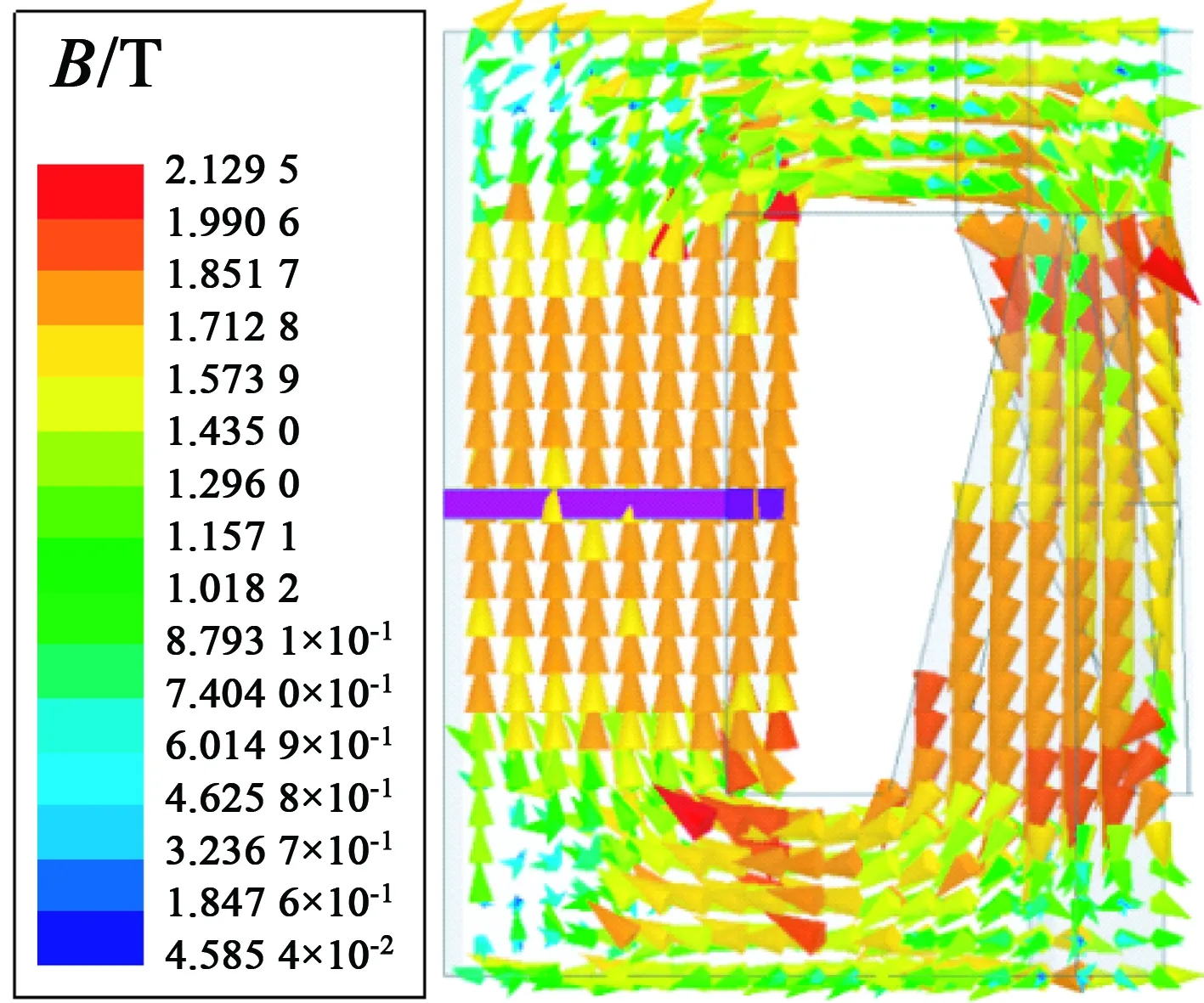
(a) 新型電機轉(zhuǎn)子
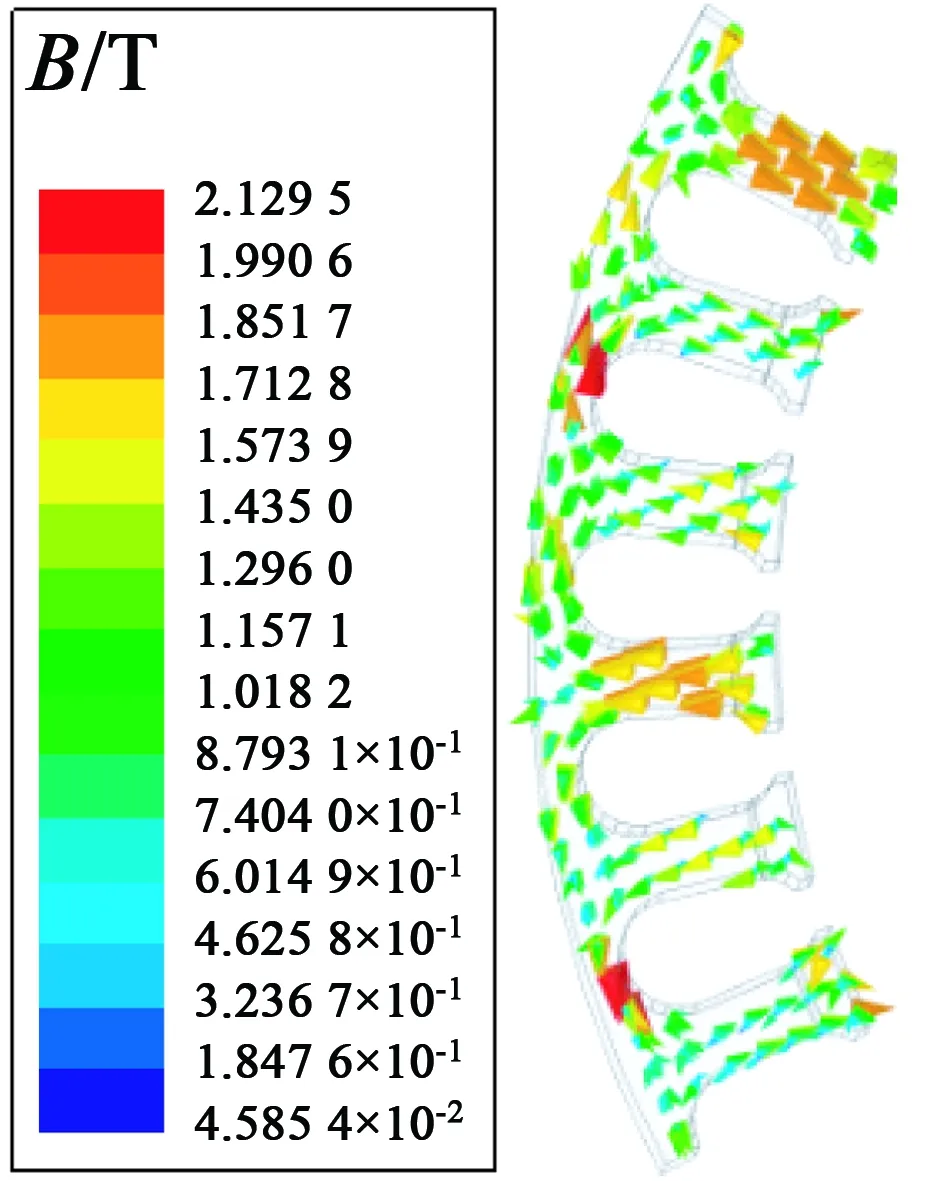
(b) 新型電機定子
由磁力線云圖可以得出,在轉(zhuǎn)子上,由于新型爪極電機存在軛部永磁體,因此新型爪極電機磁力線密集部分集中在爪極的表面和永磁體附近的爪極軛部,在定子上,磁力線經(jīng)過定子齒向定子軛部兩邊繞經(jīng)定子齒回到氣隙。此外,作為發(fā)電機,電機的電樞電流、轉(zhuǎn)矩和磁鏈?zhǔn)侵匾闹笜?biāo),圖5分別給出新型爪極電機的三相電流波形、轉(zhuǎn)矩波形和三相磁鏈波形。
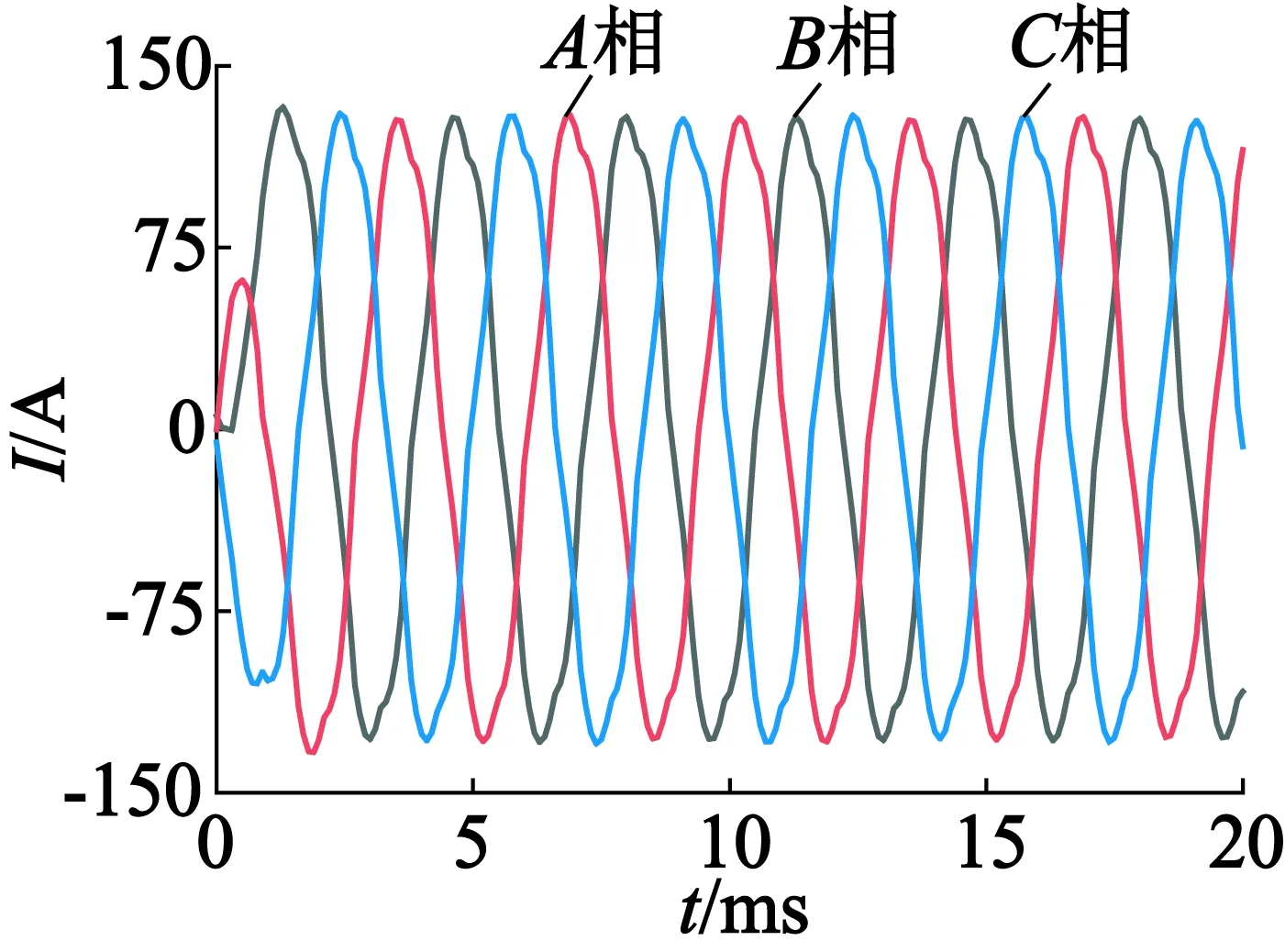
(a) 三相電樞電流波形

(b) 轉(zhuǎn)矩波形

(c) 三相磁鏈波形
由圖5可以得出,在發(fā)電機額定狀態(tài)下,電機的電樞電流為99.57 A,磁鏈峰峰值為17.83 mV·s,由于爪極電機為發(fā)電機狀態(tài),因此爪極電機的平均轉(zhuǎn)矩為-11.13 N·m,轉(zhuǎn)矩脈動為1.14 N·m。電機具有比較好的特性。
3.2 新型混合勵磁與傳統(tǒng)電勵磁對比
新型混合勵磁爪極電機由于在轉(zhuǎn)子軛部增加了永磁體與原來電勵磁形成串聯(lián)混合勵磁,相比傳統(tǒng)電勵磁,增加了主磁路的磁通密度,使得整體磁密增大。電機轉(zhuǎn)速在3 000 r/min的額定狀態(tài)下,通入1 A的勵磁電流,得出新型爪極電機和傳統(tǒng)爪極電機轉(zhuǎn)子的磁力線云圖,如圖6所示。
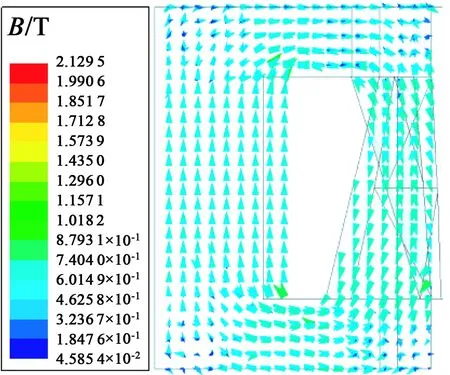
(a) 傳統(tǒng)爪極電機
(b) 新型爪極電機
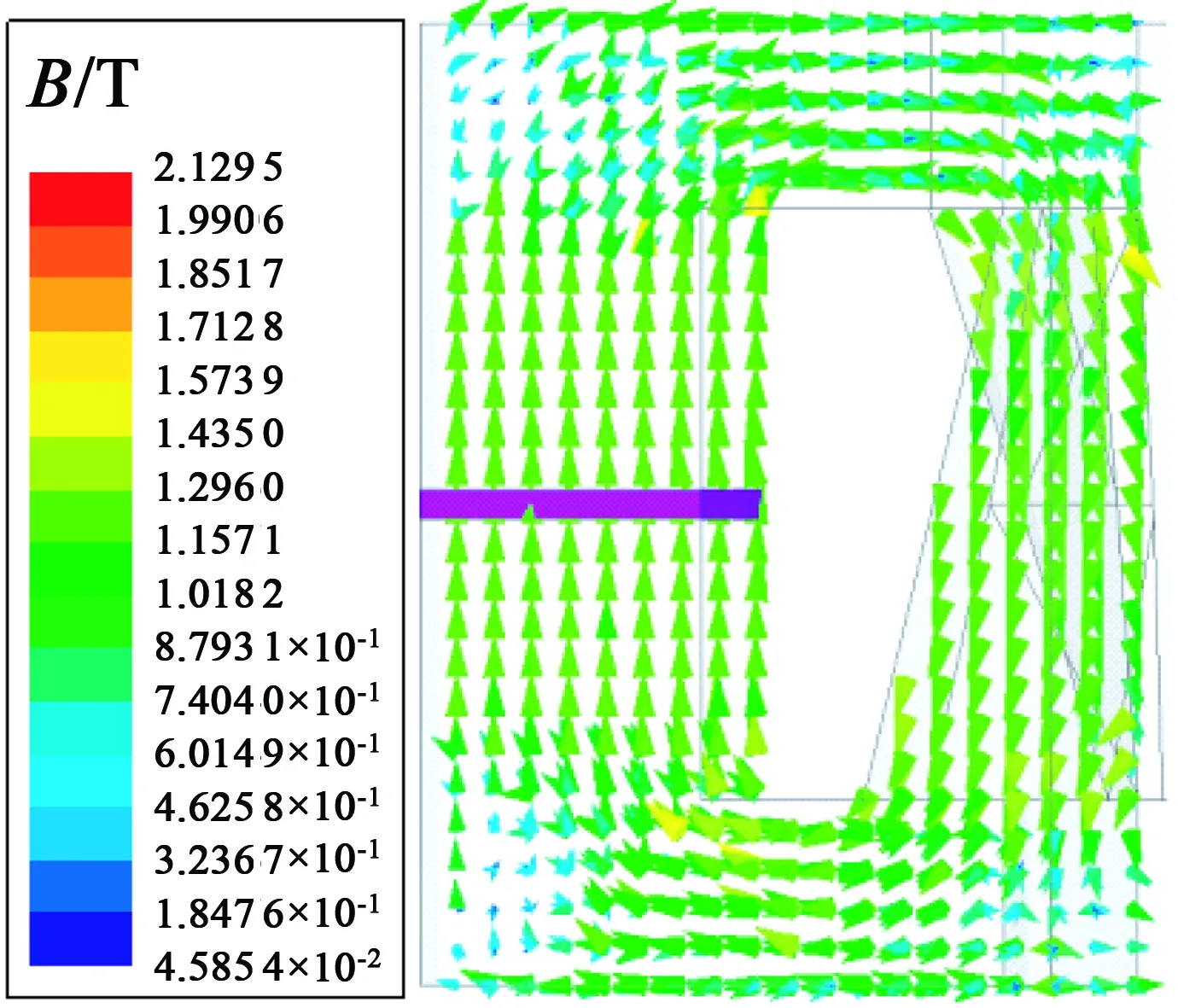
爪極電機由于本身結(jié)構(gòu)特性,容易達到磁飽和狀態(tài)。新型混合勵磁爪極電機由于在主磁路部分增加了永磁體,相比于傳統(tǒng)爪極電機,在達到磁飽和狀態(tài)后,永磁體的存在會對主磁路產(chǎn)生影響。圖7為通入10 A勵磁電流狀態(tài)下新型爪極電機和傳統(tǒng)爪極電機轉(zhuǎn)子磁力線云圖。
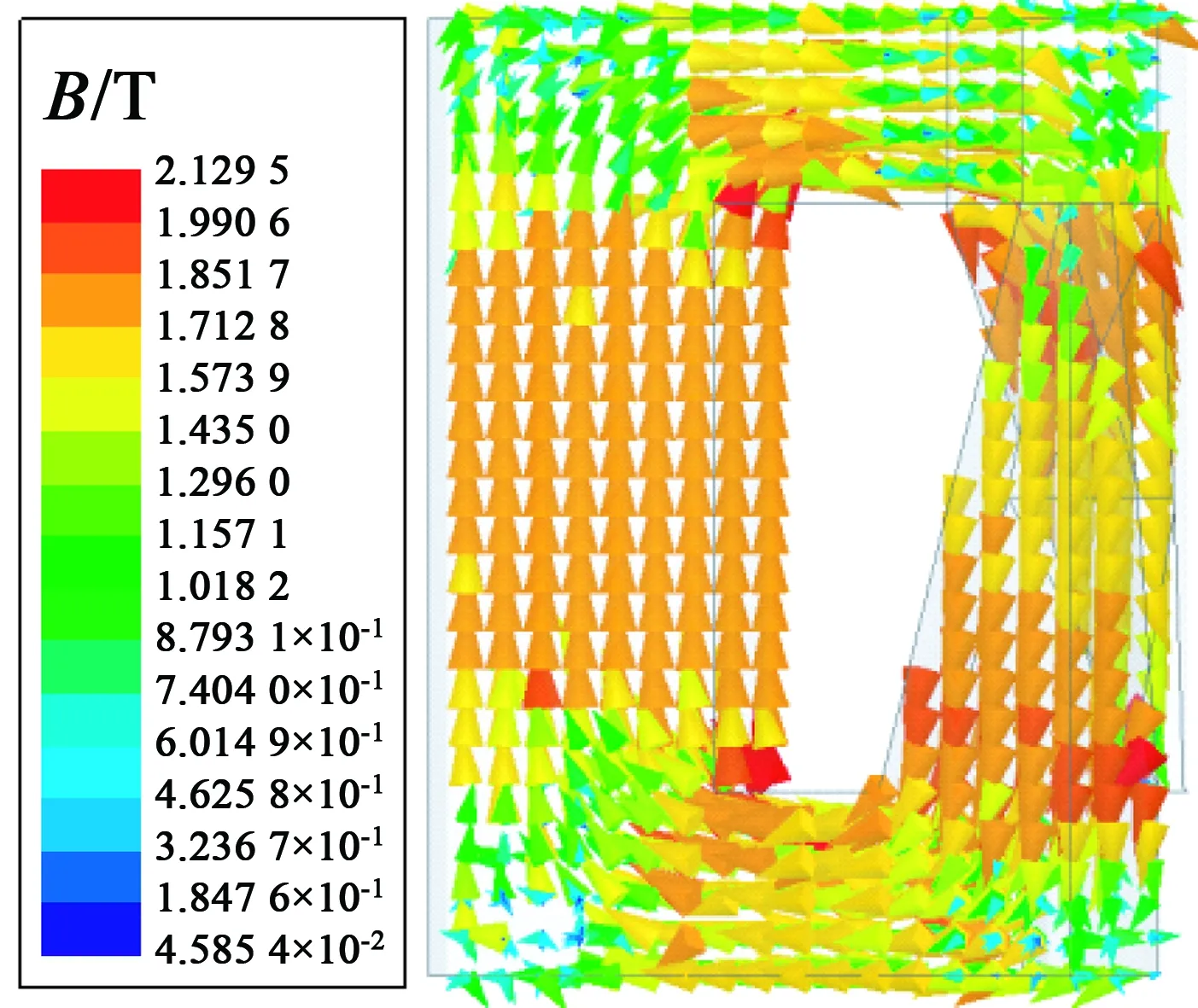
(a) 傳統(tǒng)爪極電機

(b) 新型爪極電機
圖6和圖7表示,新型混合勵磁爪極電機由于存在永磁體,永磁體本身的磁場會對整個電機磁路造成影響,會增大爪極電機總磁場強度。達到磁飽和之后,隨著勵磁電流的增大,永磁體對爪極電機的磁場影響就會減弱,甚至使爪極電機總磁場強度減小。對比圖4(a)和圖7(b)可以看出,分別在通入5.4 A和10 A勵磁電流時,新型電機轉(zhuǎn)子的磁力線云圖變化不大,因此電機飽和勵磁電流在5.4 A左右。
作為發(fā)電機,電機的電樞電流特性是研究電機的重要指標(biāo),尤其是在不同轉(zhuǎn)速下電機電樞電流是衡量發(fā)電機的標(biāo)準(zhǔn)之一[14]。由于電機三相電流成對稱結(jié)構(gòu),因此A相電流可以代表電樞電流。圖8給出了兩種電機在不同轉(zhuǎn)速下的A相電流有效值。
由圖8可以得出以下結(jié)論:
(a) 在1 000~4 000 r/min時,隨著轉(zhuǎn)速的提高,電流增大速度比較快,隨著電機轉(zhuǎn)速的提升,電機的反電動勢增加;
(b) 在4 000~8 000 r/min時,隨著轉(zhuǎn)速的提高,電流增大速度變緩;
(c) 最后在電機轉(zhuǎn)速達到8 000 r/min以后,隨著電機轉(zhuǎn)速的提升,A相電流不再增加,趨于穩(wěn)定;
(d) 新型爪極電機比傳統(tǒng)爪極電機有著更大的A相電流,新型爪極電機A相最大時電流為115.65 A,傳統(tǒng)爪極電機A相電流為103.69 A。
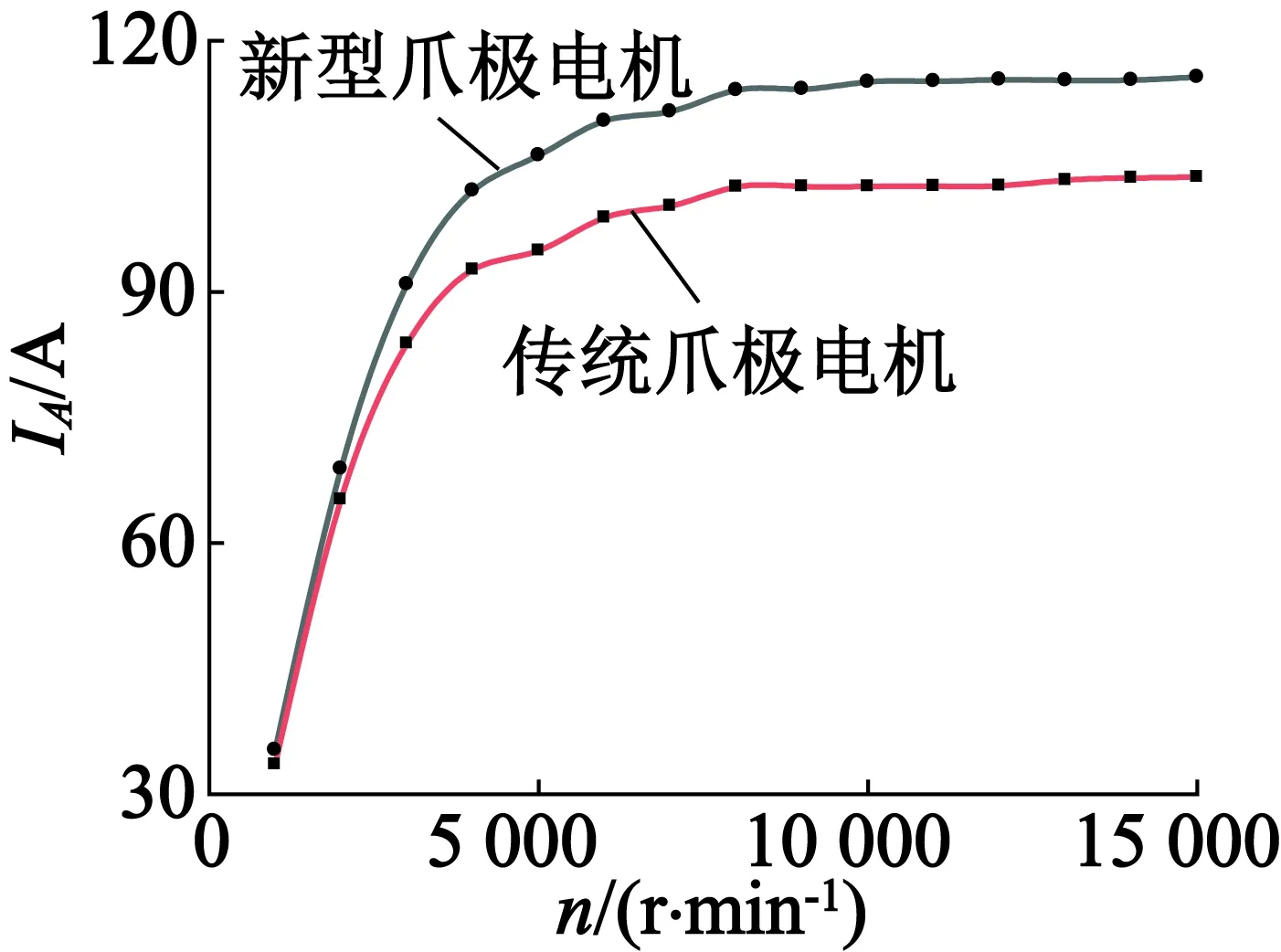
圖8 不同轉(zhuǎn)速下A相電流有效值
由圖4和圖7可知,爪極電機存在磁飽和現(xiàn)象,通入1~10 A勵磁電流,電機A相電流有效值變化的趨勢如圖9所示。

圖9 通入1~10 A勵磁電流時A相電流變化
由圖9可以得出以下結(jié)論:
(a) 傳統(tǒng)爪極電機和新型爪極電機A相電流都會隨著勵磁電流的增大而增大,但在低勵磁電流情況下增大趨勢較為明顯;在高勵磁電流時,增大趨勢減小。同時在低勵磁電流時,新型爪極電機由于永磁體阻礙電勵磁磁路,因此增大速度沒有傳統(tǒng)爪極電機大,但電流值要比傳統(tǒng)爪極電機大;
(b) 新型混合勵磁爪極電機由于存在永磁體,在勵磁電流為零時,仍能產(chǎn)生36.09 A的相電流,可以實現(xiàn)自勵;
(c) 新型混合勵磁爪極電機在低勵磁電流時,電機的A相電流受電勵磁磁場和永磁體磁場共同作用影響,在達到磁飽和后,電機的A相電流主要受電勵磁磁場影響。
3.3 反電流下新型爪極電機仿真研究
相比于傳統(tǒng)永磁勵磁爪極電機,新型混合勵磁爪極電機可以通過改變電流的大小和方向?qū)崿F(xiàn)弱磁控制。當(dāng)新型混合勵磁爪極電機通入相反電流時,電勵磁磁場和永磁勵磁磁場方向相反,會對電機性能產(chǎn)生影響。圖10為新型爪極電機通-10 A~0的勵磁電流時電機A相電流變化圖。

圖10 勵磁電流0~-10 A時電機A相電流變化圖
由圖10可以得出:爪極電機在通入-10 A~0勵磁電流時,A相電流先減小后增大;在通入-3 A勵磁電流時,爪極電機的電勵磁磁場和永磁勵磁磁場相互抵消,A相電流為0。
4 永磁體厚度對A相電流的影響
新型混合勵磁爪極電機存在勵磁磁環(huán),勵磁形成的主要磁力線要經(jīng)過轉(zhuǎn)子軛部形成回路,這一部分為爪極電機的主磁通部分,而新型混合勵磁爪極電機在轉(zhuǎn)子軛部增加永磁體,永磁體的磁通特性要小于電機轉(zhuǎn)子材料的磁通特性[15],因此由電勵磁產(chǎn)生的磁場會受到永磁體的影響。參考電機整體的磁場與磁場回路特性,永磁體厚度的選擇顯得尤為重要,選取氣隙的1~9倍(0.4~3.6 mm)和5~20倍(2 ~10 mm),兩種不同范圍厚度的永磁體進行對比分析,其A相電流變化如圖11和圖12所示。
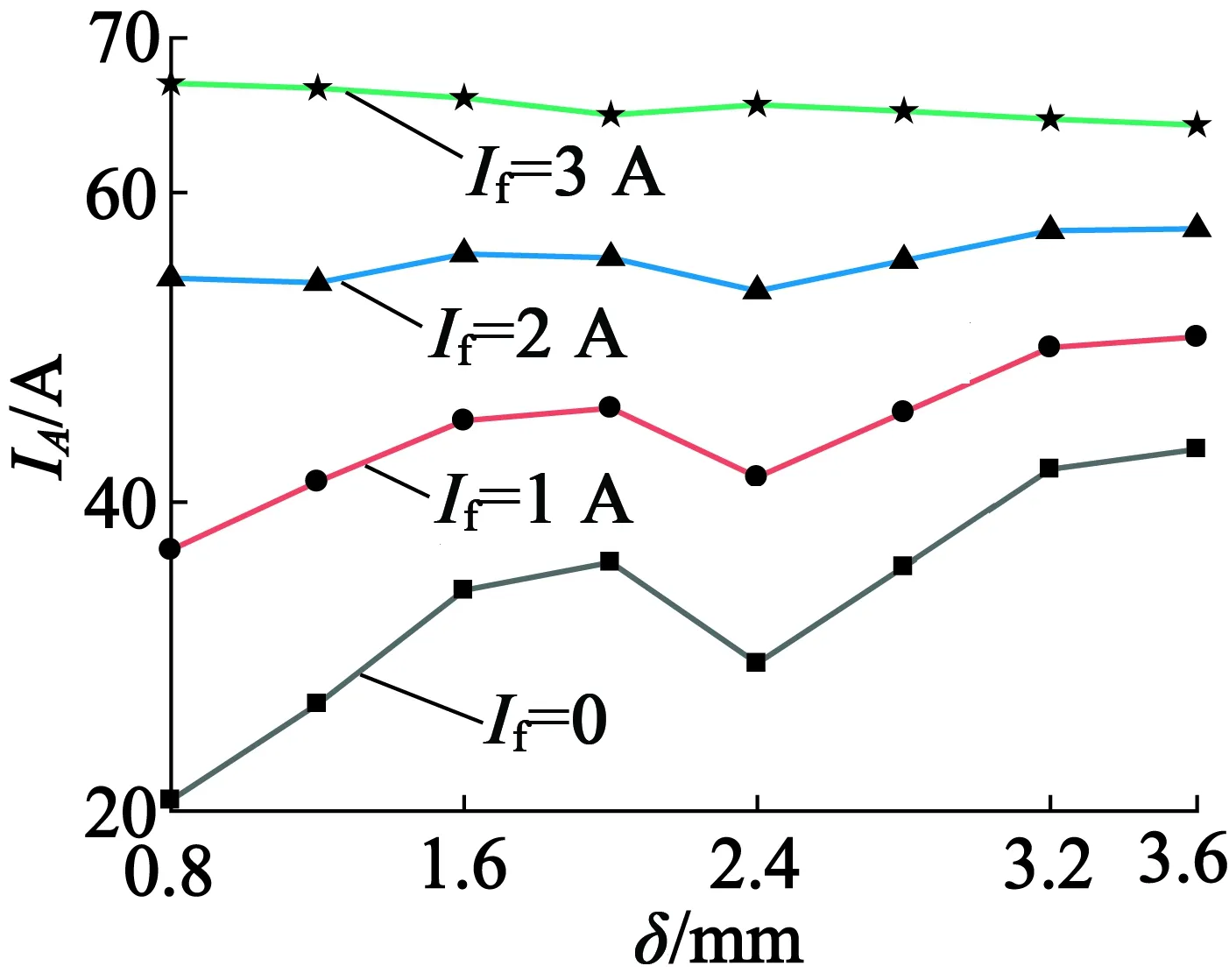
圖11 永磁體厚度0.4~3.6 mm對A相電流的影響

圖12 永磁體厚度2~10 mm對A相電流的影響
由圖11和圖12可以得出以下結(jié)論:
(a) 低勵磁電流情況下,隨著勵磁電流的增大,A相電流也相應(yīng)增大,但勵磁電流對A相電流的增幅作用在永磁體厚度較小時更為明顯,隨著永磁體厚度增加,作用效果越小;
(b) 當(dāng)勵磁電流過大時,永磁體厚度對于A相電流的影響減小直至無影響;
(c) 永磁體厚度較大情況下,隨著厚度增大,A相電流隨之增加,但是增幅效果逐漸減小,勵磁電流對A相電流的影響效果逐漸減小;
(d) 永磁體厚度較小時,A相電流先增大后減小再增大,勵磁電流對A相電流的影響效果逐漸減小,在永磁體厚度為氣隙的5倍時,A相電流達到最大。
5 結(jié) 語
本文根據(jù)爪極電機的結(jié)構(gòu)和勵磁特點,研究了一種新型混合勵磁爪極發(fā)電機,介紹了新型爪極發(fā)電機的結(jié)構(gòu)和電磁原理,并運用三維有限元軟件對新型爪極電機進行了建模分析。通過建模分析可以得出以下結(jié)論:
1) 新型爪極電機所增加的永磁體磁路可以和傳統(tǒng)的電勵磁磁路形成疊加作用,從而實現(xiàn)混合勵磁作用;
2) 新型爪極電機在額定狀態(tài)下有著比較好的性能,其中相電流達到99.57 A,轉(zhuǎn)矩達到11.13 N·m。轉(zhuǎn)矩波動較小;
3) 新型混合勵磁爪極可以通過調(diào)節(jié)勵磁電流大小和方向?qū)崿F(xiàn)弱磁控制,當(dāng)永磁體厚度為2 mm,通入-3 A勵磁電流時可實現(xiàn)相電流為0;
4) 永磁體厚度對電機的主要磁場產(chǎn)生一定的影響,未達到磁飽和情況下,永磁體厚度較小時,電機磁場主要由電勵磁磁場決定,隨著厚度增加,電機磁場主要由電勵磁磁場和永磁磁場決定,當(dāng)厚度增大到一定程度,電機磁場主要由永磁磁場決定。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
華人時刊(2020年13期)2020-09-25 08:21:42
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年1期)2016-01-11 16:53:24