一種改善永磁同步電機性能的多目標優化方法
2019-02-25 02:23:30王明星王愛元李軼華莊石榴
微特電機 2019年1期
王明星,王愛元,李軼華,莊石榴
(上海電機學院,上海 201306)
0 引 言
在設計電機時,為了在一定程度上提高永磁電機的效率,通常對永磁電機的結構參數進行優化[1-2],但這些參數在影響永磁電機效率的同時也會影響永磁電機的噪聲值[3-4]。因此,在保證電機轉矩一定的情況下,對永磁電機的效率和噪聲同時進行優化,具有重要的實際意義。
1 永磁同步電機噪聲的求解過程
永磁同步電機噪聲計算涉及到三個場的耦合[5],在ANSYS Maxwell中,利用該電機全模型,計算定子內表面徑向磁拉力,將其作為激勵源耦合到ANSYS Mechanical中進行該電機三維定子諧響應分析,然后將諧響應分析結果作為激勵源耦合到ANSYS Mechanical ACT中進行三維聲場分析。變頻器供電的永磁電機噪聲頻率主要分布在開關頻率及其倍頻附近[6],考慮到計算內存,選取頻率范圍為0~10 kHz,其中開關管的頻率3 kHz,所以噪聲在3 kHz,6 kHz,9 kHz處表現得最明顯。為了便于算法的優化,本文選取6 kHz處的噪聲值作為后續的一個優化目標。
2 永磁同步電機效率的求解過程
參考現有的永磁電機結構參數,將其確定為電機初始參數值,然后通過ANSYS Maxwell軟件對電機進行建模,電機采用PWM供電,開關管頻率為3 kHz。通過軟件計算永磁電機轉矩平均值,結合電機的轉速,從而求出永磁電機的輸出功率;利用軟件求出永磁電機的鐵耗,然后根據該電機的規格乘以鐵耗修正系數,得到最后的鐵耗值;利用軟件求出永磁體的渦流損耗;機械損耗按該電機規格由經驗值所得;計算定子繞組的銅耗,最后將損耗與輸出功率相加得到電機的輸入功率,從而計算電機的效率。
3 參數優化過程
3.1 初始參數的計算
本文采用ANSYS分析軟件對永磁同步電機進行噪聲和效率分析,采用4極24槽,功率為550 W的小功率永磁同步電機作為算例,額定轉速為1 500 r/min,主要參數如表1所示。
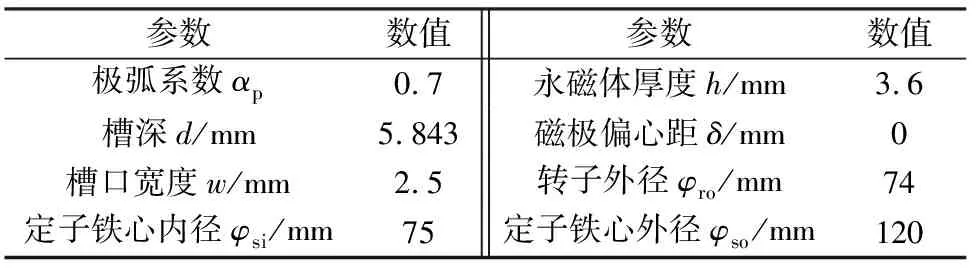
表1 永磁同步電機的初始參數值
結合 ANSYS Maxwell軟件,計算電機內部各初始損耗:鐵耗為12.53 W,銅耗為88 W,永磁體上的渦流損耗為2.1 W,機械損耗為12 W,初始效率為85%。
結合ANSYS Workbench軟件,計算電機噪聲初始值。由于永磁電機的噪聲值主要分布在開關頻率及其倍頻附近,選取頻率范圍為0~10 kHz,測取6 kHz處的電機噪聲值約為51.5 dB( 如圖1所示),根據新版GB10069.3-2008《旋轉電機噪聲測定方法及限制 第3部分:噪聲限制》的介紹,該規格電機噪聲值應在50 dB左右,因此算例噪聲值符合規定值。其中圖2和圖3分別是電機初始時定子內表面的徑向磁拉力和等效應力。
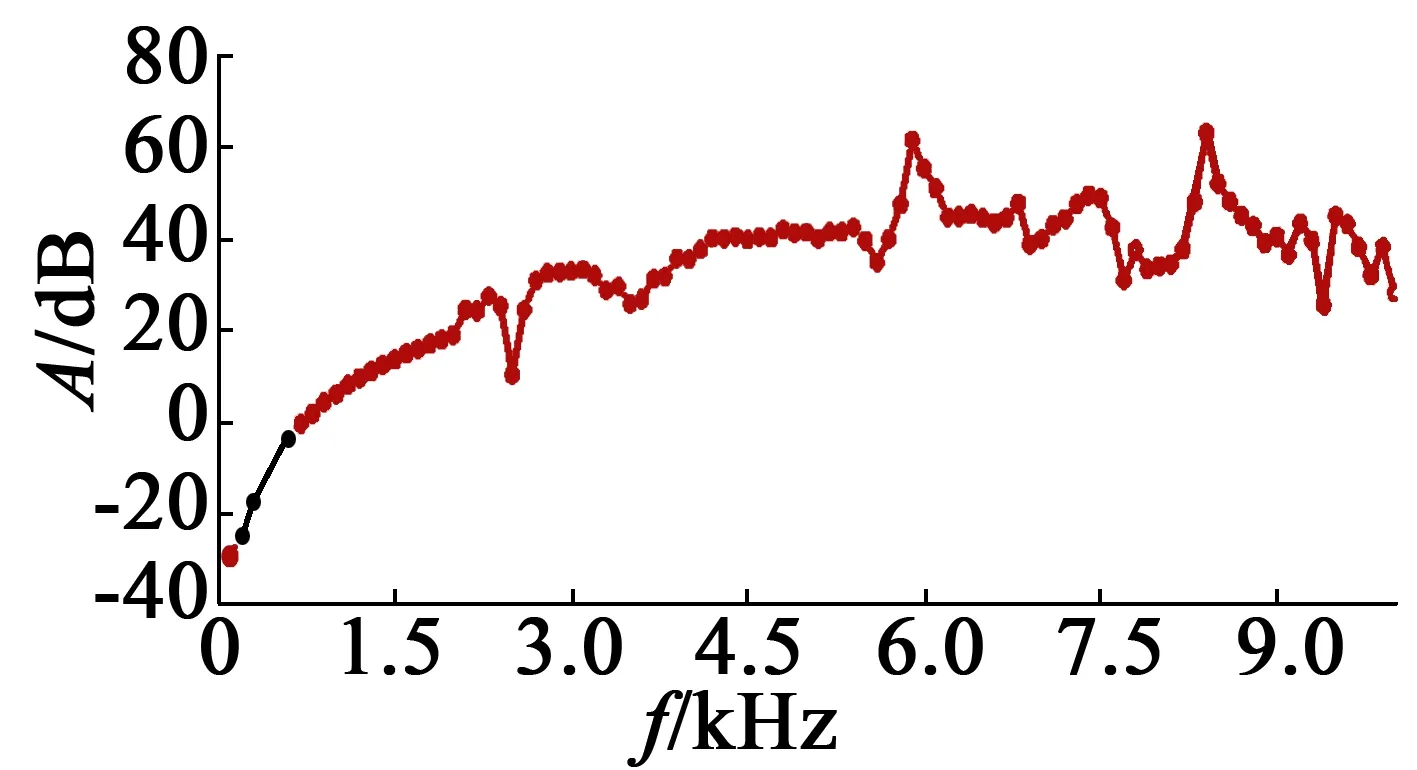
圖1 初始時聲場分析的SPL
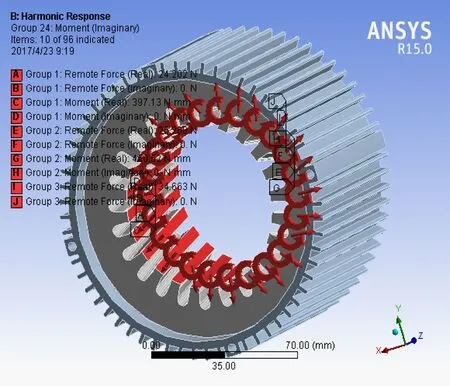
圖2 初始定子內表面的徑向磁拉力
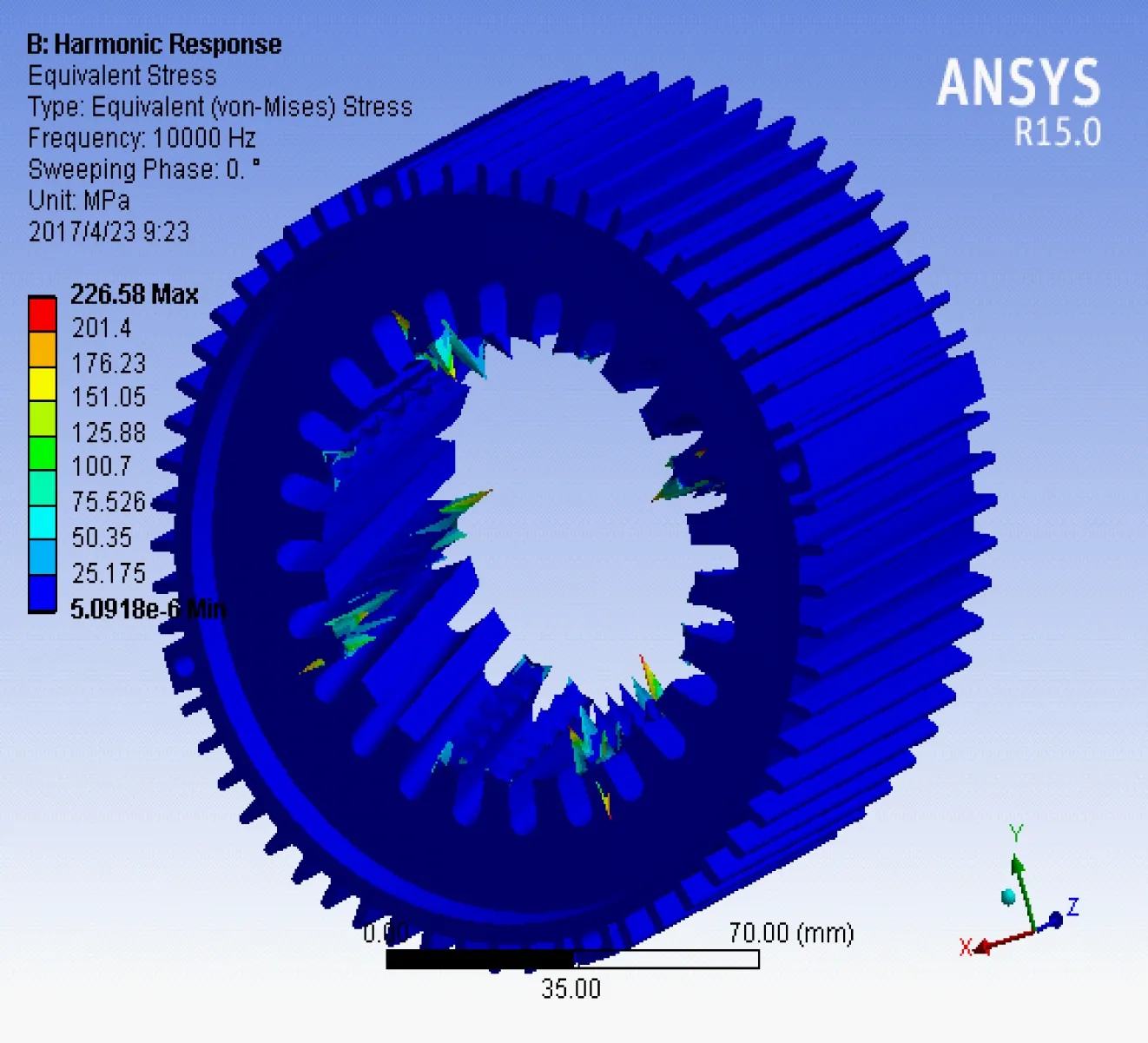
圖3 電機的初始等效應力
3.2 數據樣本的建立
此過程的建立是為后面支持向量機的擬合提供樣本空間。數據樣本由5個設計變量(磁極厚度、極弧系數、槽深、磁極偏心距、槽口寬度)、2個目標函數(效率和噪聲)和1個約束條件(電機轉矩)組成,每個設計變量取5個值,共3 125個數據。為了抽取具有代表性的樣本數據,采用正交試驗法對數據樣本進行收集。
本文中5個因素的取值范圍分別為磁極厚度1.5 ~3.5 mm,極弧系數0.6~0.72,槽深5~8 mm,磁極偏心距1~5 mm,槽口寬度2~4.5 mm。根據因素和水平的個數,選取L25(56)的正交試驗表,各因素所對應的水平如表2所示。

表2 因素水平表
3.3 數學模型的建立
支持向量機(以下簡稱SVM)是一種針對有限數據進行研究的新型學習方法,主要有兩大應用:函數擬合和數據分類。本文主要利用其函數擬合功能,利用高斯徑向基核函數求解約束條件和目標函數的數學模型[7],為下面粒子群多目標優化奠定基礎。
SVM函數擬合功能的原始方程式:
(1)
式中:n代表SVM的個數,本文為25個;ωi代表SVM的系數,保存在程序結果model.coef里面;K(xi,x)=exp(-γ‖xi-x‖)2,其中‖xi-x‖為二范數距離,xi=model.svs(i,:),表示支持向量(1×5的行向量),全部向量保存在程序結果的model.svs里面,x是待預測向量(1×5的行向量);b*是偏置系數。從式(1)中可以看出,欲想得到3個數學模型,需要編寫程序求出高斯徑向基核函數、偏置系數及高斯徑向基核函數的系數。本文采用libsvm工具箱分別把3個數學模型的25組數據作為訓練集,另外取20組不同的數據作為測試集,通過交叉驗證的方法[8],求取3個未知參數。
將程序結果中的model值代入到式(1)中,得到約束條件和兩個目標函數的數學模型,SVM的模型預測數據和真實數據之間的對比如圖4所示。從圖4中可以看出,預測值與真實值變化趨勢基本一致,說明3個數學模型擬合有效。
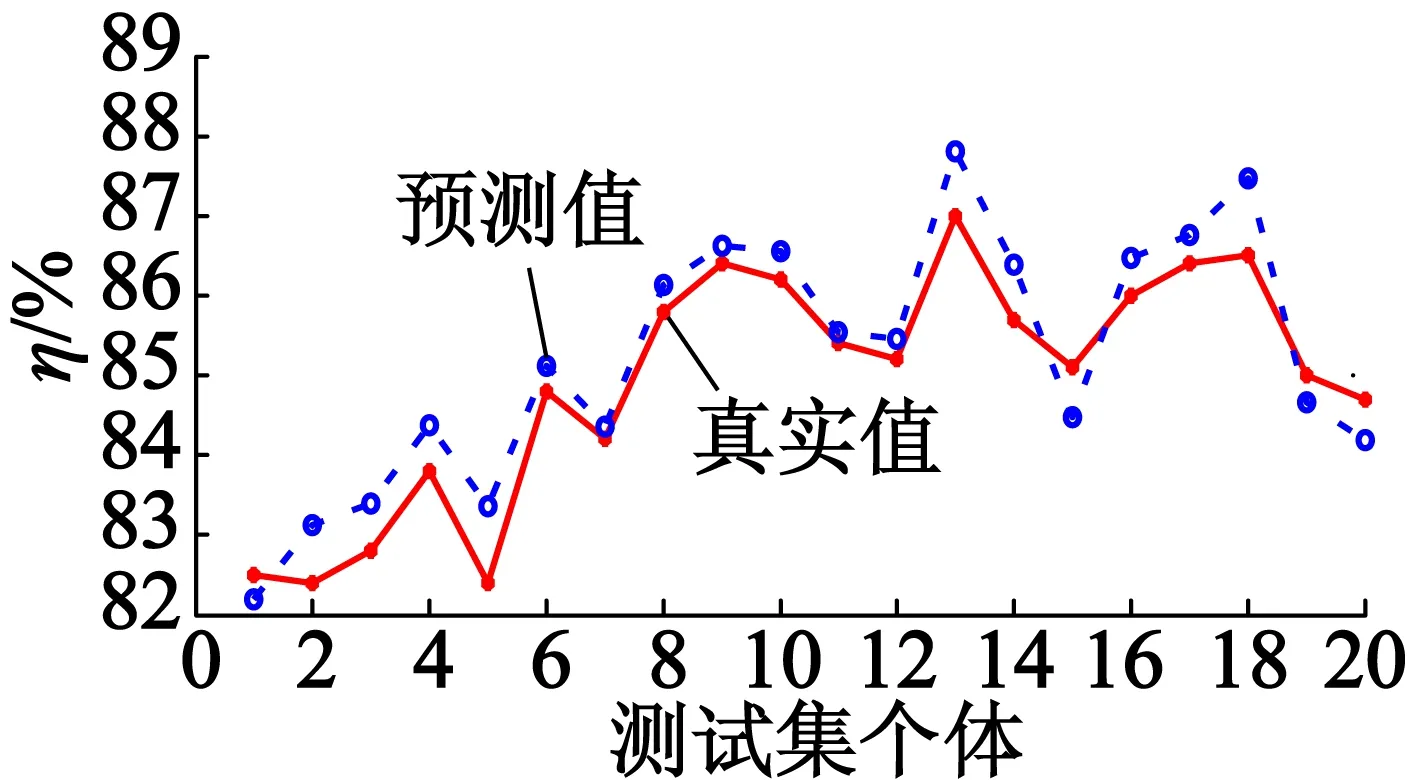
(a) 效率擬合曲線
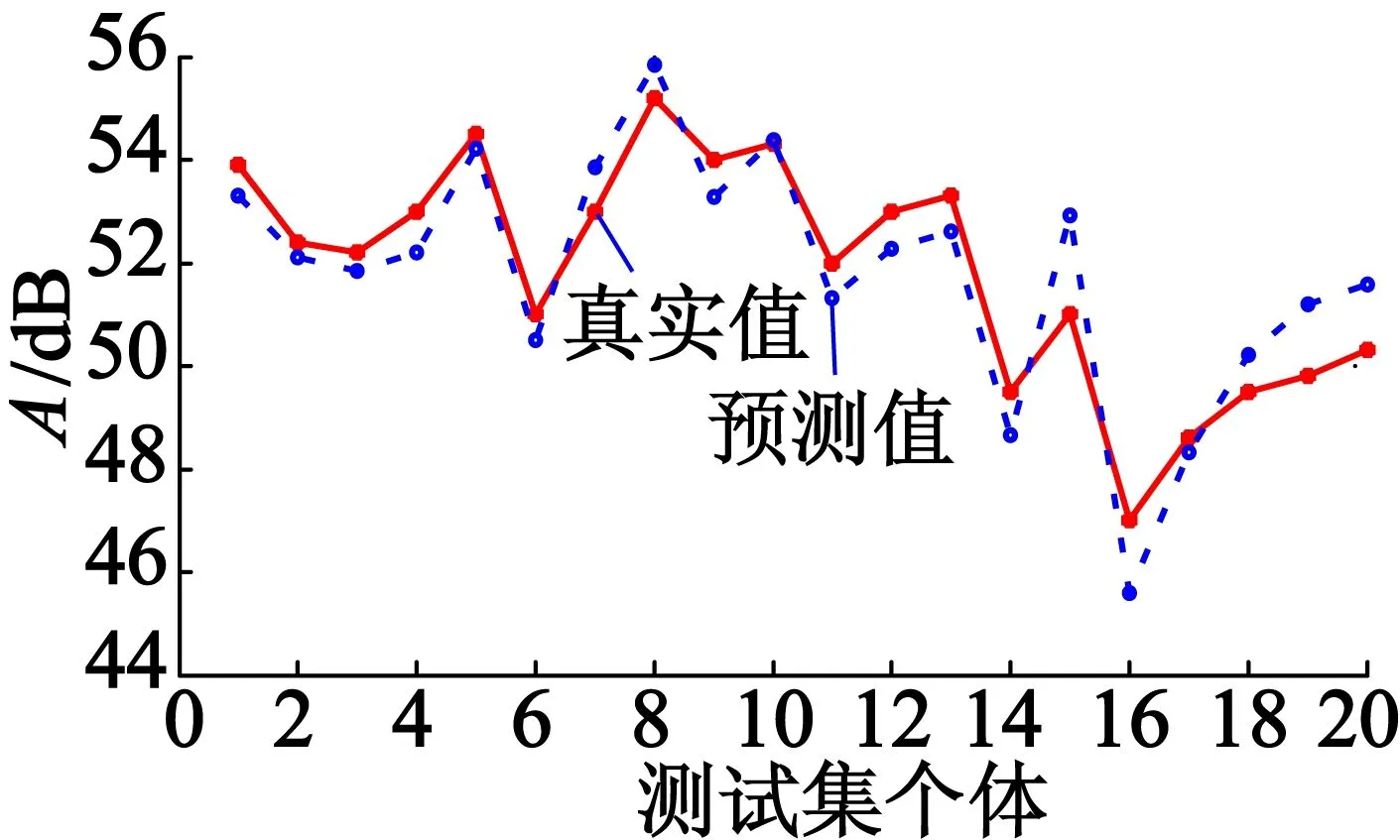
(b) 噪聲擬合曲線

(c) 轉矩擬合曲線
3.4 粒子群多目標優化
在實際工程優化問題中,多數問題是多目標優化問題,本文利用粒子群多目標優化算法,在電機轉矩一定的條件下實現對效率和噪聲的尋優[9-10]。粒子群多目標優化與單目標優化一樣,都需要不斷更新粒子的速度和位置,其速度和位置公式如式(2)、式(3)所示。
(2)
(3)

ωk是動態變化的,假設K為迭代總次數,則第k次迭代時的慣性權重:
(4)
式中:ωmax和ωmin分別為迭代前已設置好的最小值和最大值。
式(3)中ωk的值對尋優能力有較大的影響。粒子群尋優算法分為全局搜索和局部搜索,當全局搜索能力較強時,其算法收斂速度較快;當局部搜索能力較強時,其算法收斂精度較高,而較大的ωk值有利于前者,較小的ωk值有利于后者。式(4)中對ωk的處理可以同時兼顧這兩種情況,搜索能力得到加強。優化后的結果如圖5所示,圖5中每個實心點都代表一個非劣解,非劣解構成了Pareto面。從圖5中可以看出,各個非劣解分布較為均勻,并且Pareto面前端形狀良好。

圖5 非劣解空間分布
從圖5中可以看出,優化得到的不是最優解,而是一個非劣解集,需要從非劣解集中根據實際問題選擇需要的解[11]。本文從圖5中選擇,3組形狀良好的Pareto前端進行比較,每組選擇2個點,將6個值代入到軟件中進行計算,與粒子群優化(以下簡稱PSO)尋優的結果進行對比,如表3所示。
綜合考慮后選取(3.5,0.63,5,5,3.8)為實際問題的最優解,此時電機的各種損耗:鐵耗12 W,銅耗60 W,永磁體渦流損耗2.23 W,機械損耗12 W,效率為86.5%,噪聲值為46.5 dB。與初始時的效率和噪聲相比,性能得到改善。噪聲值變化曲線如圖6所示,圖7和圖8分別是優化后電機定子內表面的徑向磁拉力和等效應力。

表3 有限元計算和PSO計算結果對比表
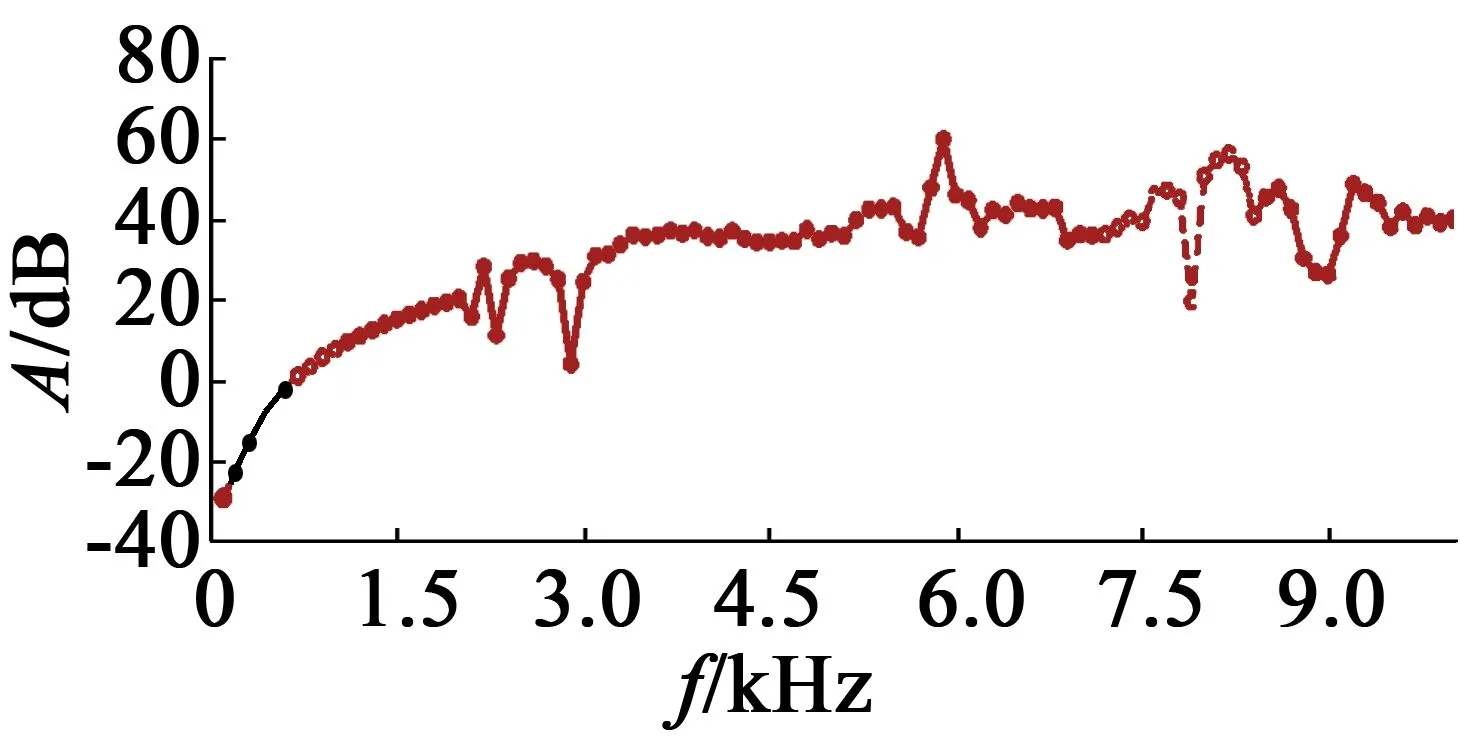
圖6 優化后聲場分析的SPL

圖7 優化后定子內表面的徑向磁拉力
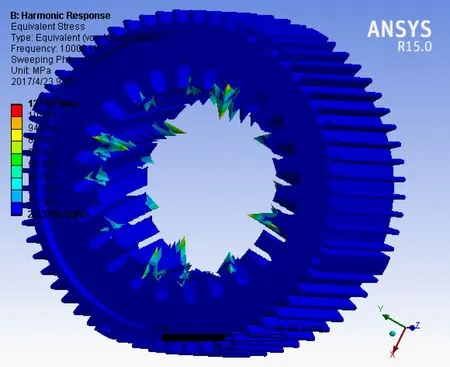
圖8 優化后電機的等效應力
4 結 語
本文從影響永磁同步電機效率和噪聲的主要參數出發,通過利用具有約束條件(保證電機轉矩一定)的粒子群多目標優化算法對電機的效率和噪聲進行優化。
在優化過程中,首先利用正交試驗法為SVM的擬合選取數據樣本,然后利用SVM求解約束條件和兩個目標函數的數學模型,最后在保證電機轉矩足夠的條件下,利用粒子群多目標優化算法對效率和噪聲進行尋優。最后依次將最優解的有限元計算值與PSO優化值以及電機初始值進行對比,發現效率和噪聲均得到改善,說明研究具有一定的實際意義。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
現代企業(2015年2期)2015-02-28 18:45:09