基于干擾觀測器的永磁同步電動機滑模控制
2019-02-25 02:23:12顏漸德蘭永紅羅勝華
微特電機 2019年1期
關(guān)鍵詞:系統(tǒng)
顏漸德,王 輝 ,蘭永紅,羅勝華
(1.湖南大學,長沙 410082; 2.湖南工程學院,湘潭 411101;3.湘潭大學,湘潭 411105; 4.湖南電氣職業(yè)技術(shù)學院,湘潭 411101)
0 引 言
永磁同步電動機(以下簡稱PMSM)因其具有能量密度高、效率高、可靠性高等優(yōu)點,在交流驅(qū)動系統(tǒng)中得到廣泛的應用。然而,PMSM是典型的多變量和強耦合的非線性系統(tǒng)、存在參數(shù)攝動、外部干擾等不確定因素,導致PMSM控制系統(tǒng)的動態(tài)性能下降。如何尋求有效的控制策略,克服PMSM系統(tǒng)的外部干擾以提高系統(tǒng)的性能,引起了國內(nèi)外學者的廣泛關(guān)注[1]。
近年來,許多學者在提高PMSM的速度跟蹤性能上,提出了許多控制策略,如:矢量控制[2]、反推控制[3-4]、自適應控制及無源控制等[5-7]。文獻[4,8]針對PMSM矢量控制系統(tǒng),通過構(gòu)造新的子系統(tǒng),并選取合適的虛擬變量和虛擬控制函數(shù),利用李雅普諾夫穩(wěn)定性理論設計控制量,從而使系統(tǒng)具有全局穩(wěn)定性,實現(xiàn)良好的系統(tǒng)跟蹤。滑模變結(jié)構(gòu)控制算法簡單、魯棒性好和可靠性高,對提高動態(tài)特性效果明顯[9-11]。文獻[12]設計了一種積分時變滑模變結(jié)構(gòu)的速度環(huán)控制器,解決了傳統(tǒng)PID控制器魯棒性差、系統(tǒng)抗擾能力弱和動態(tài)響應性能不佳的問題。文獻[13]對PMSM的無速度傳感器控制進行研究,對滑模速度觀測器進行了改進。為了減小延時并提高伺服系統(tǒng)電流環(huán)控制性能,文獻[14]提出了一種基于無差拍控制原理的PMSM魯棒預測電流控制算法。文獻[15]為了增強系統(tǒng)的抗干擾性,提出了一種用于表面式PMSM的上下界滑模變結(jié)構(gòu)速度控制方法。文獻[16]提出一種擾動補償控制方法。總之,以上方法具有較高的跟蹤精度和魯棒性,由于設計過程中沒有對外部干擾進行估計,系統(tǒng)中參數(shù)微小變化或存在外部干擾時,系統(tǒng)的速度會存在一個較大的過沖,從而使得系統(tǒng)跟蹤性能下降。
受以上文獻啟發(fā),本文提出一種基于干擾觀測器和滑模控制器相結(jié)合的PMSM速度控制方法。設計基于指數(shù)趨近律的滑模控制器,以提高電機系統(tǒng)的靜態(tài)和動態(tài)跟蹤性能。為了補償負載干擾,進一步設計基于干擾觀測器(以下簡稱DOB)的反饋控制特性。仿真與實驗表明,本文的方法提高了PMSM控制系統(tǒng)速度跟蹤精度,對負載干擾具有較好的抑制效果。
1 PMSM的數(shù)學模型及問題描述
為了簡化分析,首先做如下假設:氣隙中轉(zhuǎn)子永磁磁場為正弦波;定子鐵心不飽和,忽略渦流和磁滯損耗;轉(zhuǎn)子上無阻尼繞組。在以上假設下,得到PMSM在d,q坐標系下的數(shù)學模型,其電壓方程[3]:
(1)
式中:Ld,Lq分別為交、直軸電感;Rs為PMSM的定子電阻;ω為PMSM的角速度;ψf為交鏈磁鏈;uq,iq為PMSMq軸上的電壓與電流分量;ud,id為PMSMd軸上的電壓與電流分量。
PMSM的轉(zhuǎn)矩方程:
(2)
式中:Te為PMSM的轉(zhuǎn)矩;p為PMSM的極對數(shù)。對于隱極式PMSM,有Ld=Lq,因此可將PMSM的轉(zhuǎn)矩方程簡化:
(3)
PMSM的運動方程[3]:
(4)
式中:J,B分別為系統(tǒng)的轉(zhuǎn)動慣量和摩擦系數(shù);TL為系統(tǒng)的負載轉(zhuǎn)矩。
將式(4)代入式(3),可得:
(5)
式中:J=J0+ΔJ,TL=TL0+ΔTL,J0和TL0是系統(tǒng)參數(shù)的確定值,ΔJ和ΔTL表示系統(tǒng)參數(shù)的不確定性。
考慮到電機參數(shù)變化及未建模不確定性,式(5)可以進一步表示:
(6)
式中:Δa,Δb,Δc為系統(tǒng)參數(shù)不確定性攝動。

(7)
式中:d為不確定性干擾。
PMSM系統(tǒng)要求輸出速度響應快、運行平穩(wěn),具有較高的速度跟蹤精度。然而實際運用中,沒有考慮外界干擾(如式(7)中的d),會導致系統(tǒng)速度跟蹤精度下降,從而影響PMSM控制系統(tǒng)性能。為了保證系統(tǒng)具有良好的穩(wěn)定性和魯棒性。本文提出一種基于DOB的滑模控制器,以提高PMSM控制系統(tǒng)的跟蹤精度及外部干擾抑制能力。其控制系統(tǒng)結(jié)構(gòu)框圖如圖1所示,圖1中,ω*為給定轉(zhuǎn)速,e為速度誤差,SMC為滑模控制器。
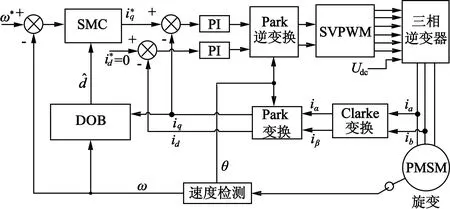
圖1 基于DOB與SMC的結(jié)構(gòu)框圖
2 控制系統(tǒng)設計
2.1 滑模控制器設計
針對標稱系統(tǒng)式(7),即d=0,定義滑模面:
(8)
式中:λ為正常數(shù)。
對式(8)求導,可得:
(9)
趨近律函數(shù)采用指數(shù)趨近律:
(10)
式中:sat(·)為削弱抖振的飽和函數(shù):
(11)
選取李雅普諾夫函數(shù):
(12)
為抑制不確定的干擾,將DOB觀測到的干擾估計引入控制器,由式(9)和式(10),基于干擾補償?shù)幕W兘Y(jié)構(gòu)控制律,q軸參考電流可設計:
(13)
對V2關(guān)于時間求導,根據(jù)式(9)有:

(14)
(15)
根據(jù)李雅普諾夫穩(wěn)定性,閉環(huán)系統(tǒng)漸近穩(wěn)定。因此在有限時間內(nèi),位置跟蹤誤差都將達到邊界層。由式(8)和式(11)可知,速度跟蹤誤差的邊界可以限定:
2.2 DOB的設計

常見的DOB結(jié)構(gòu)框圖如圖2所示。
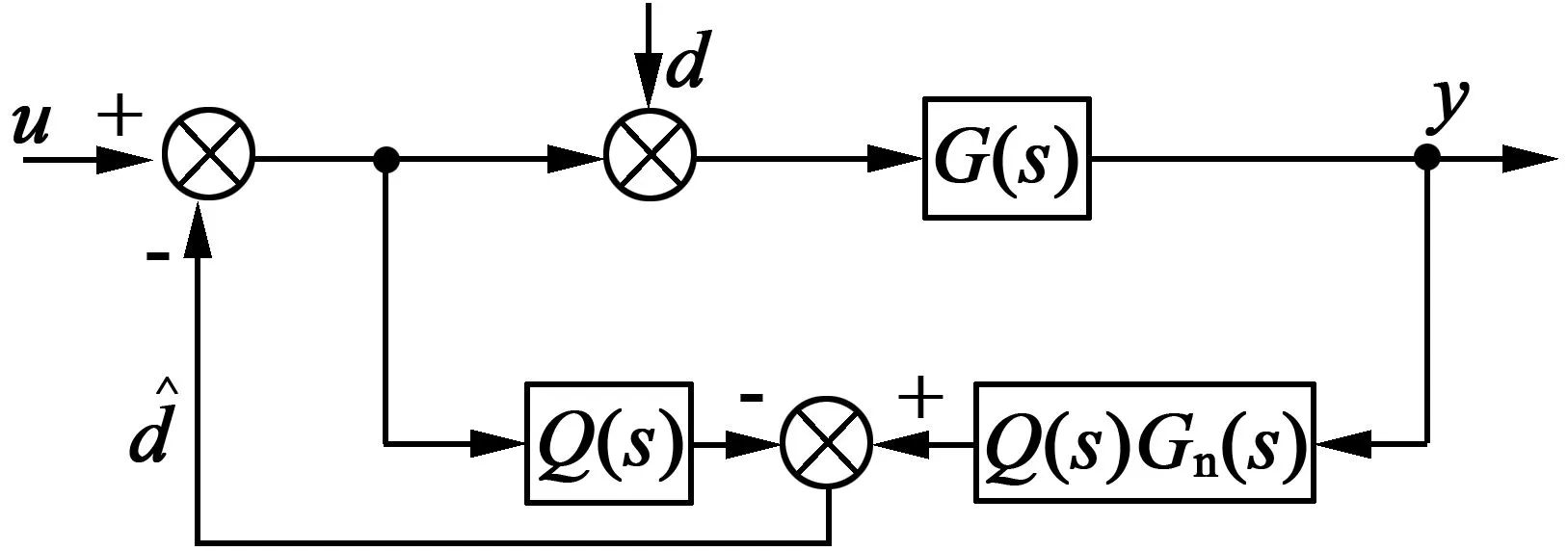
圖2 DOB結(jié)構(gòu)控制框圖

(16)
另外,由圖2可以得出如下輸入輸出關(guān)系:
y=Gny(s)u+Gdy(s)D(s)
(17)
式中:
(18)
(19)

3 仿真與實驗結(jié)果
3.1 仿真結(jié)果
為驗證PMSM控制系統(tǒng)中,基于DOB的滑模控制器(DOB-SMC)的有效性,應用MATLAB/Simulink軟件進行了仿真。PMSM的主要參數(shù)如表1所示;控制系統(tǒng)其他參數(shù):摩擦系數(shù)B=0.008 N·m·s/rad,轉(zhuǎn)動慣量J=0.000 35 kg·m2;控制器參數(shù)設置:λ=2 000,k=150,ε=500。

表1 永磁同步電動機參數(shù)
上述PMSM系統(tǒng)簡化后得到速度環(huán)名義模型傳遞函數(shù)[17]:
(20)
為滿足DOB設計條件,本文采用3階低通濾波器[18]:
(21)
式中:τ為時間常數(shù),決定Q(s)的截止頻率。
初始給定轉(zhuǎn)速為1 200 r/min,在0.6 s時給定速度為1 000 r/min,在0.8 s,加入了一個負載干擾。圖3給出了SMC與DOB-SMC的速度響應波形。實線和虛線分別為采用SMC與DOB-SMC的速度跟蹤曲線,由圖3可以看出,SMC與DOB-SMC電機的轉(zhuǎn)速跟蹤性能良好,但當有負載或干擾時,DOB-SMC比SMC更快地達到穩(wěn)定,且過沖更小。因此,DOB-SMC的干擾抑制效果明顯。
圖4為SMC與DOB-SMC的電磁轉(zhuǎn)矩響應波形。圖5,圖6分別為SMC與DOB-SMC的三相電流波形。當速度瞬間變化時,三相電流會有尖峰,對應的轉(zhuǎn)矩與電流成正比。

圖3 SMC與DOB-SMC的速度響應
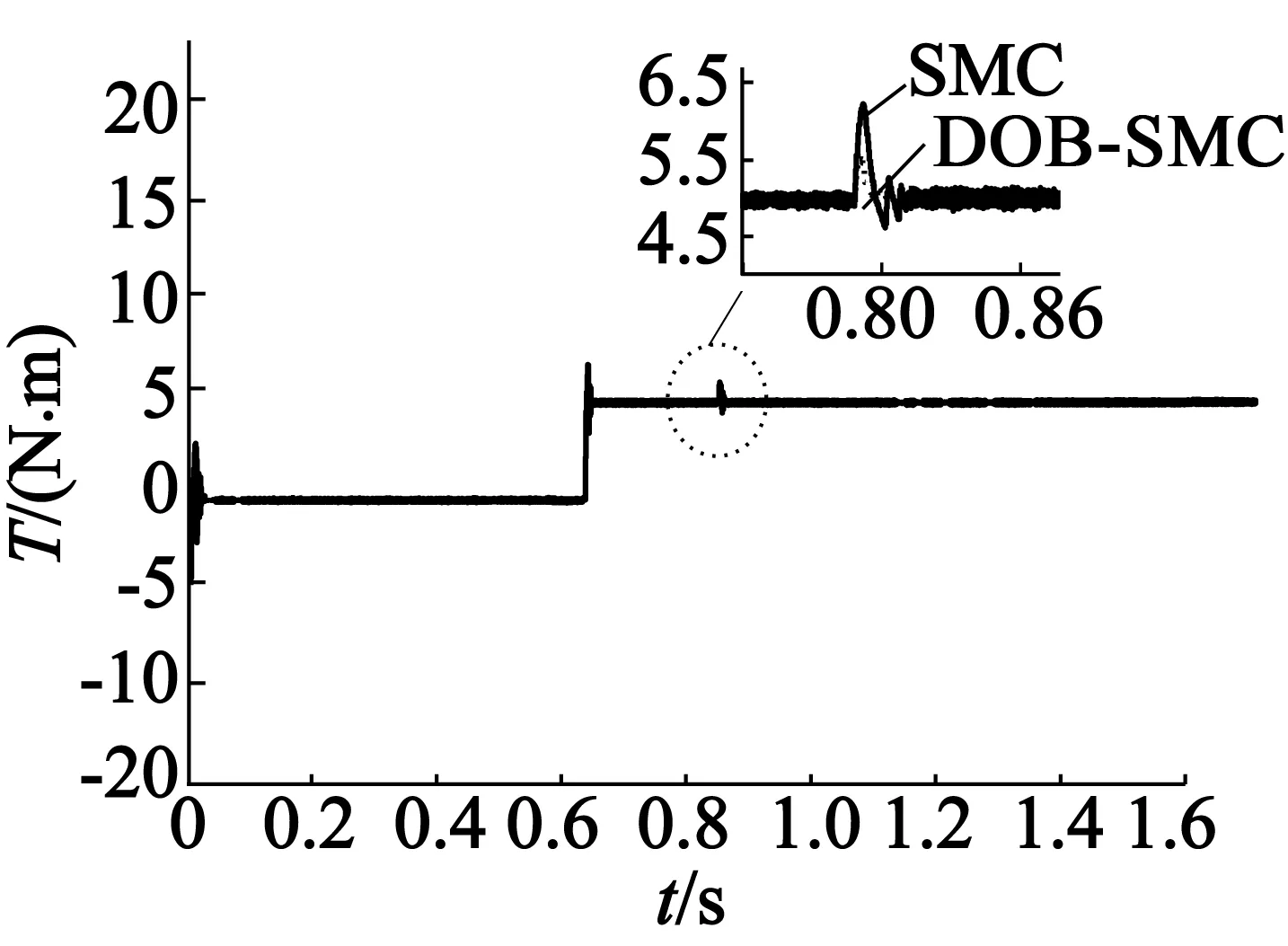
圖4 SMC與DOB-SMC的電磁轉(zhuǎn)矩響應
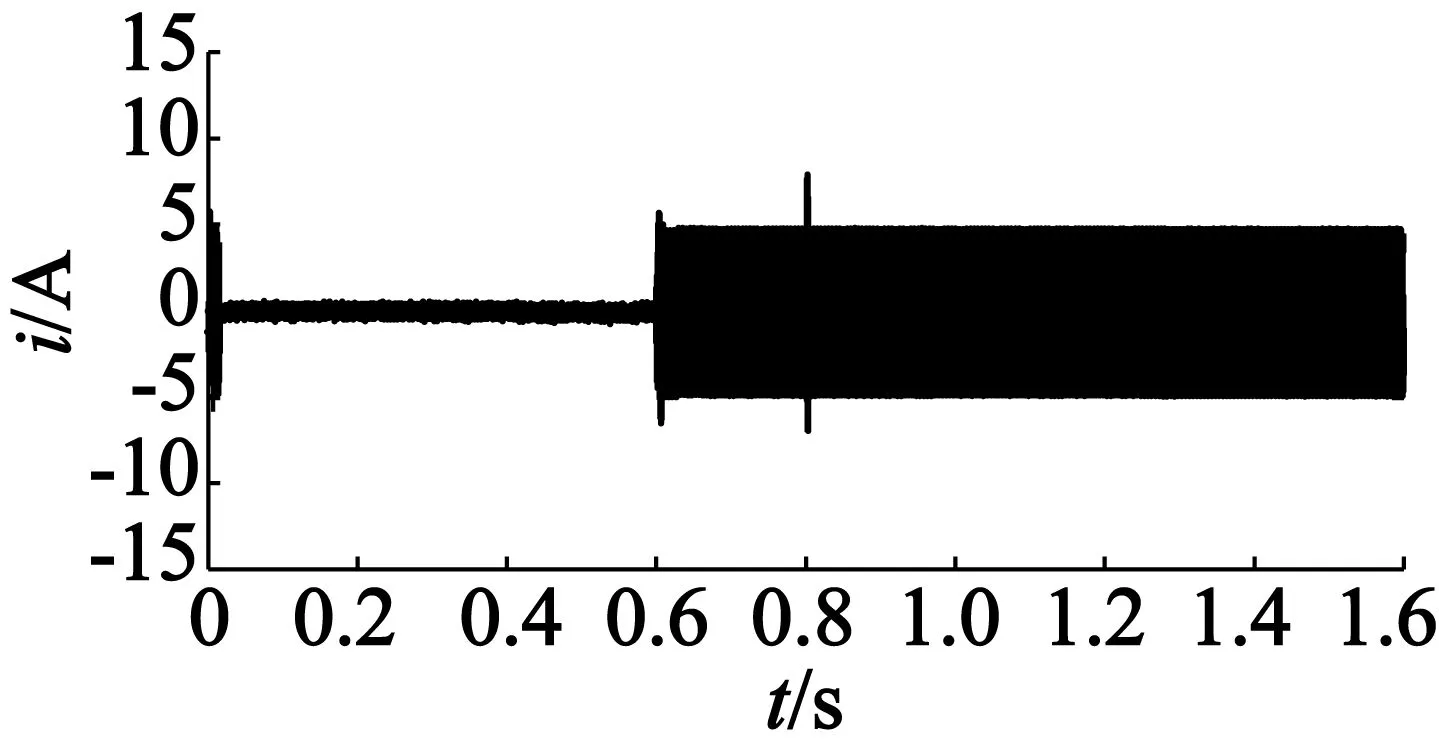
圖5 SMC的三相電流波形
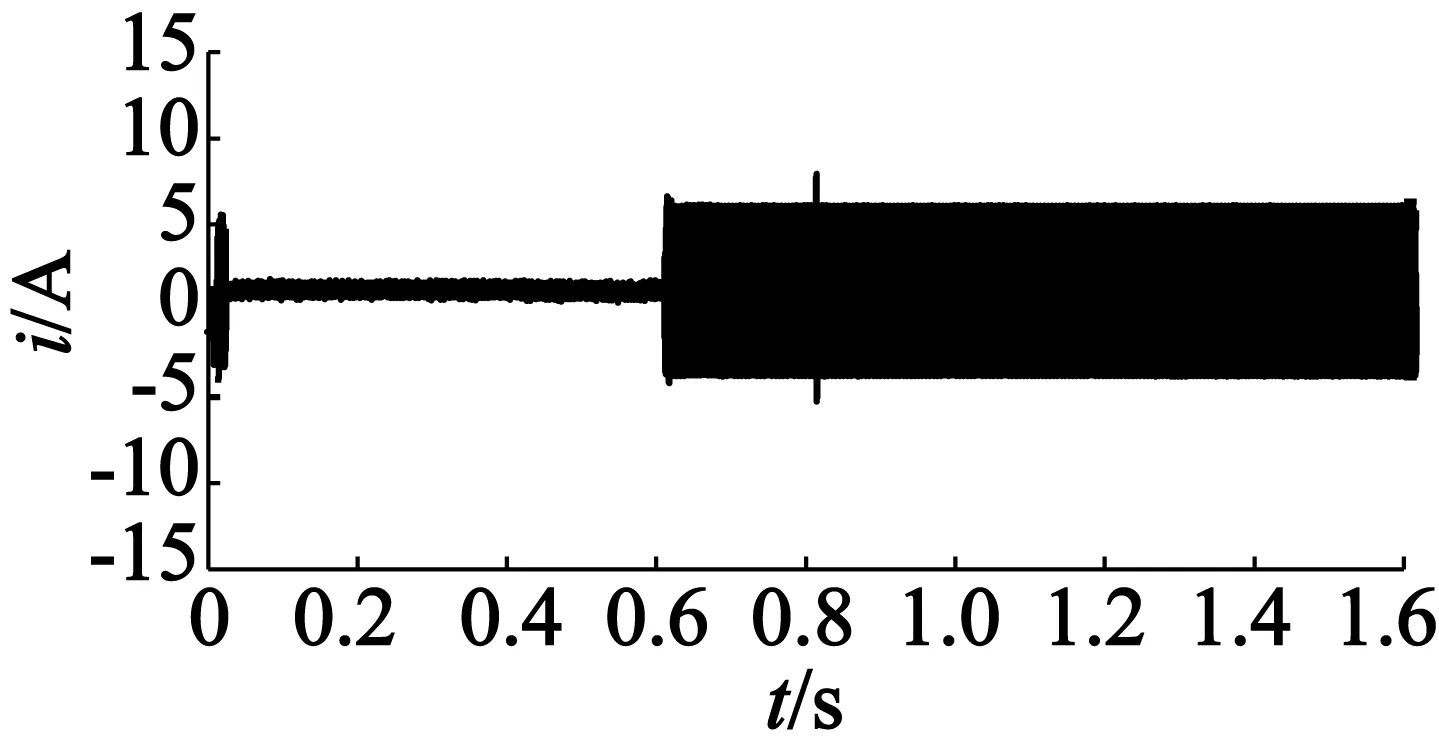
圖6 DOB-SMC的三相電流波形
綜上所述,本文的速度跟蹤控制方法,能及時跟蹤電磁轉(zhuǎn)矩和給定的轉(zhuǎn)速,使系統(tǒng)具有響應快,超調(diào)小,抑制負載干擾強等優(yōu)點。
3.2 實驗結(jié)果
PMSM實驗平臺如圖7所示,平臺中有2臺PMSM,其中1臺PMSM工作在電動狀態(tài),另1臺PMSM工作在發(fā)電狀態(tài)來模擬負載,負載大小由上位機軟件調(diào)節(jié),電機參數(shù)如表1所示。采用TI公司的DSP處理器TMS320F28035,功率器件采用英飛凌智能模塊IPM。需要觀測的數(shù)據(jù)可以通過軟件設置在DSP主控板的模擬輸出。
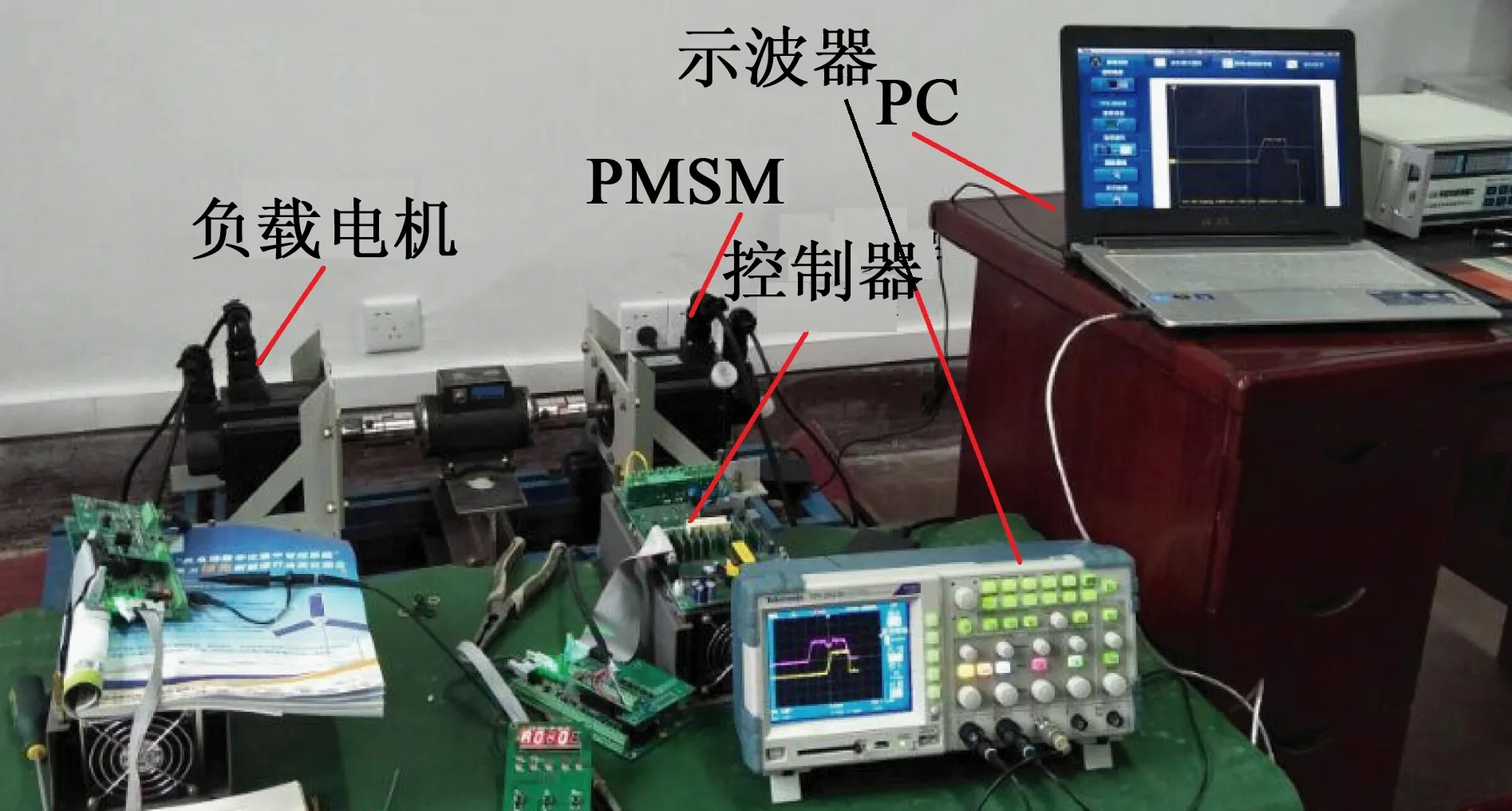
圖7 永磁同步電動機實驗平臺
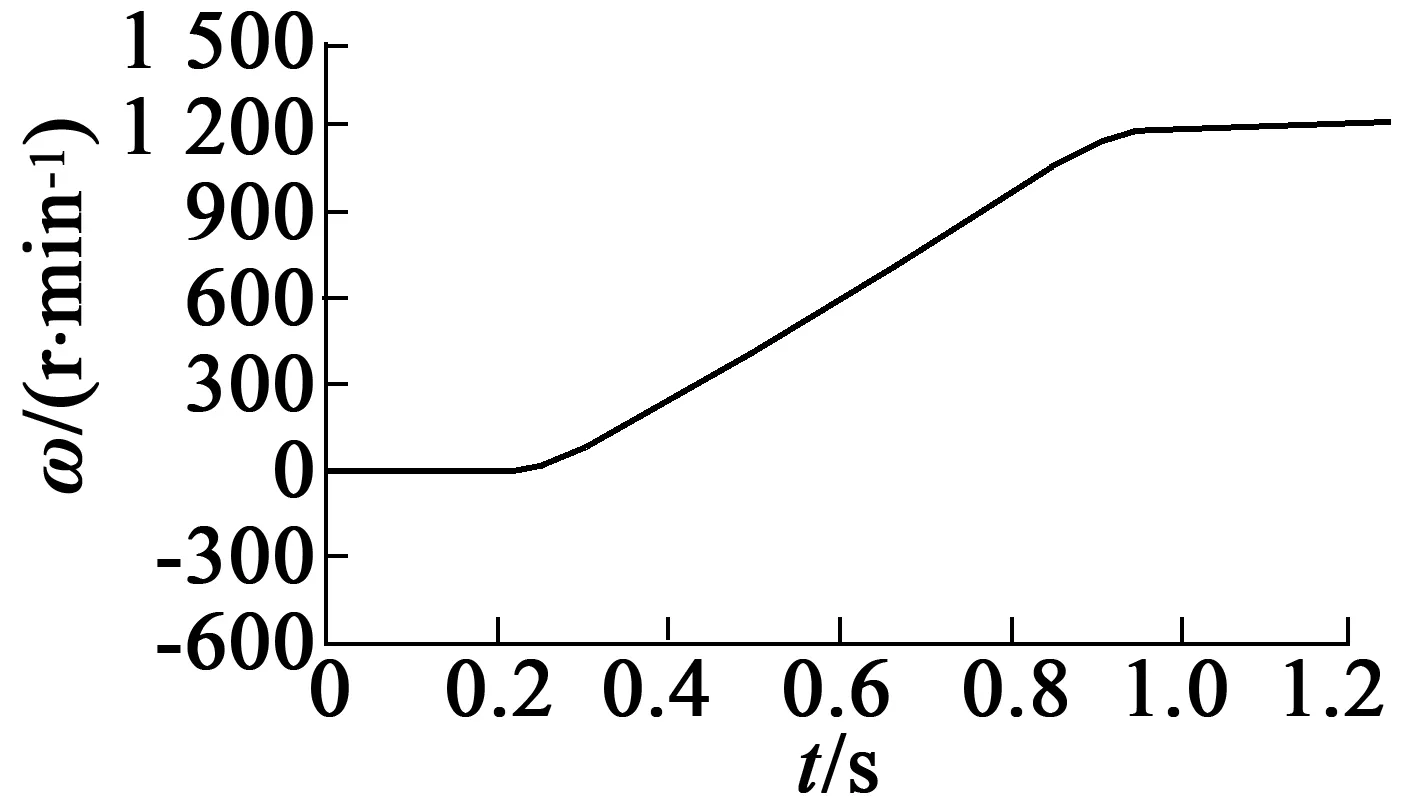
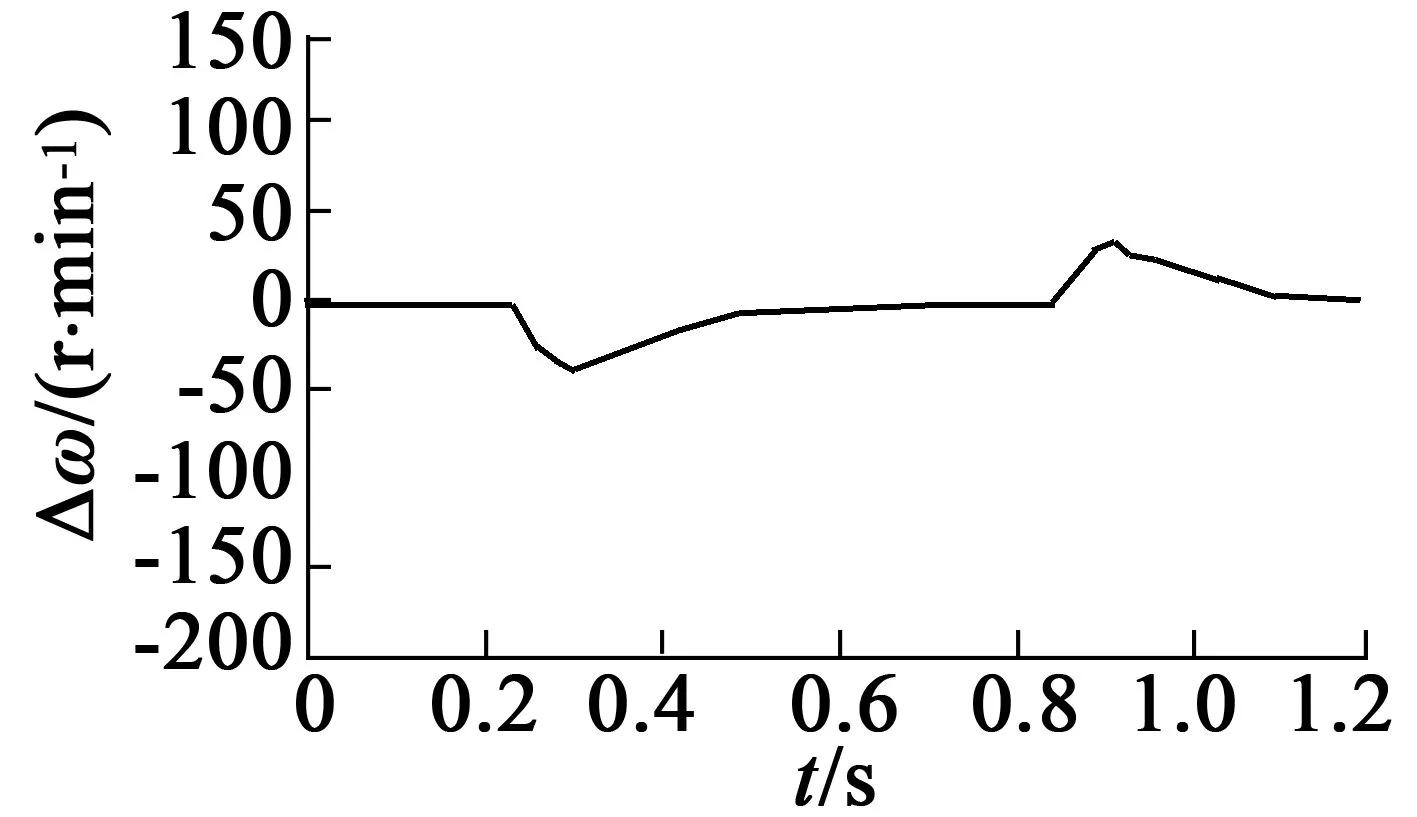
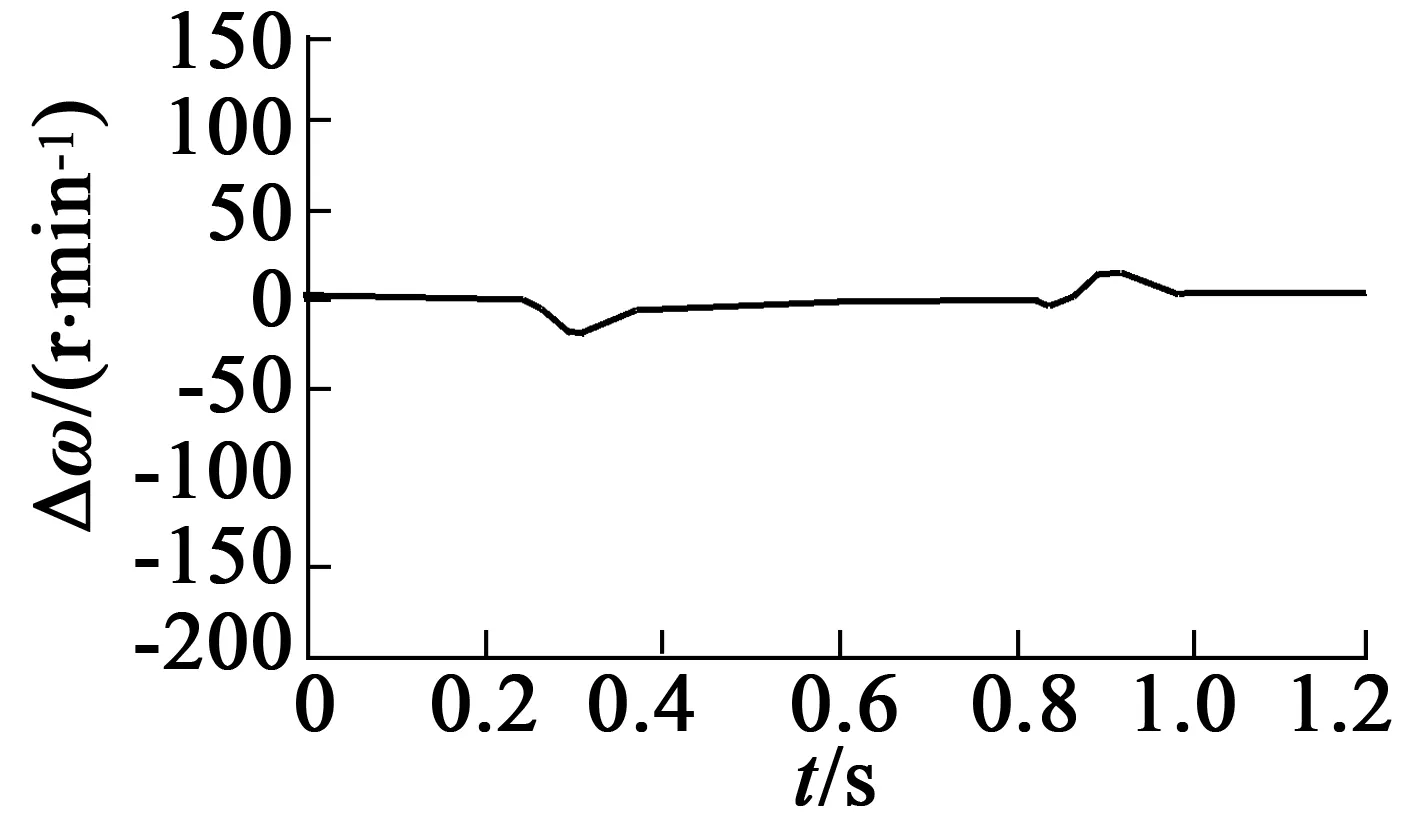
電機初始速度為0,從0.25 s開始均勻增速,到0.9 s時速度達到1 200 r/min,負載為0。圖8、圖9分別為SMC和DOB-SMC的實驗波形。由圖8的速度跟蹤誤差曲線可以看出,傳統(tǒng)SMC的速度跟蹤誤差從0.25~0.5 s時間內(nèi)速度存在誤差,速度誤差幅度最大達到40 r/min。由圖9的DOB-SMC速度跟蹤誤差曲線可以看出,從0.2~0.35 s時間內(nèi)速度也存在誤差,速度誤差幅度最大達到20 r/min。圖10(b)中DOB-SMC的q軸參考電流波形,明顯比圖10(a)中傳統(tǒng)SMC的電流波形平滑。

(a) SMC
(b) DOB-SMC
(a) SMC
(b) DOB-SMC

(a) SMC
(b) DOB-SMC
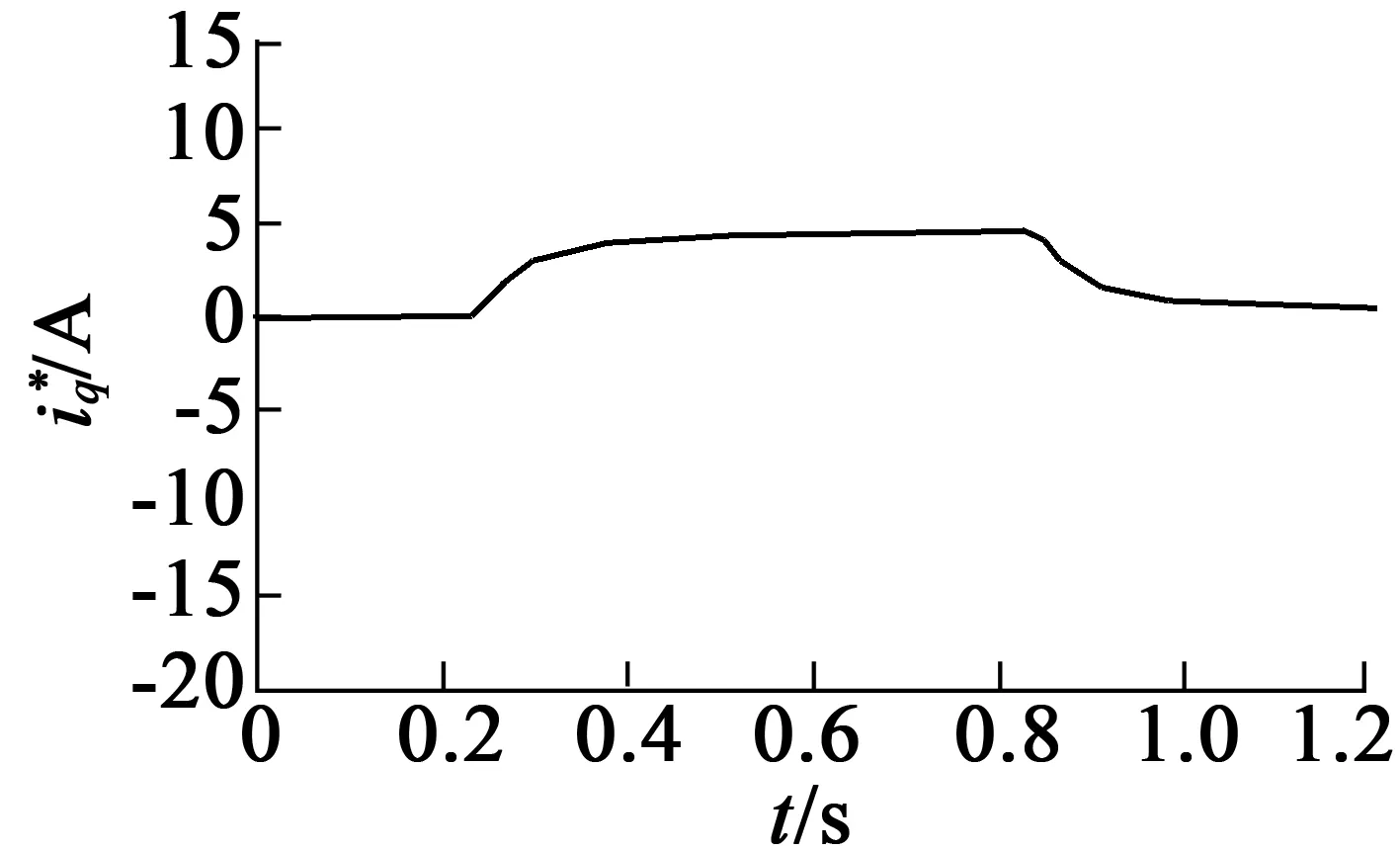
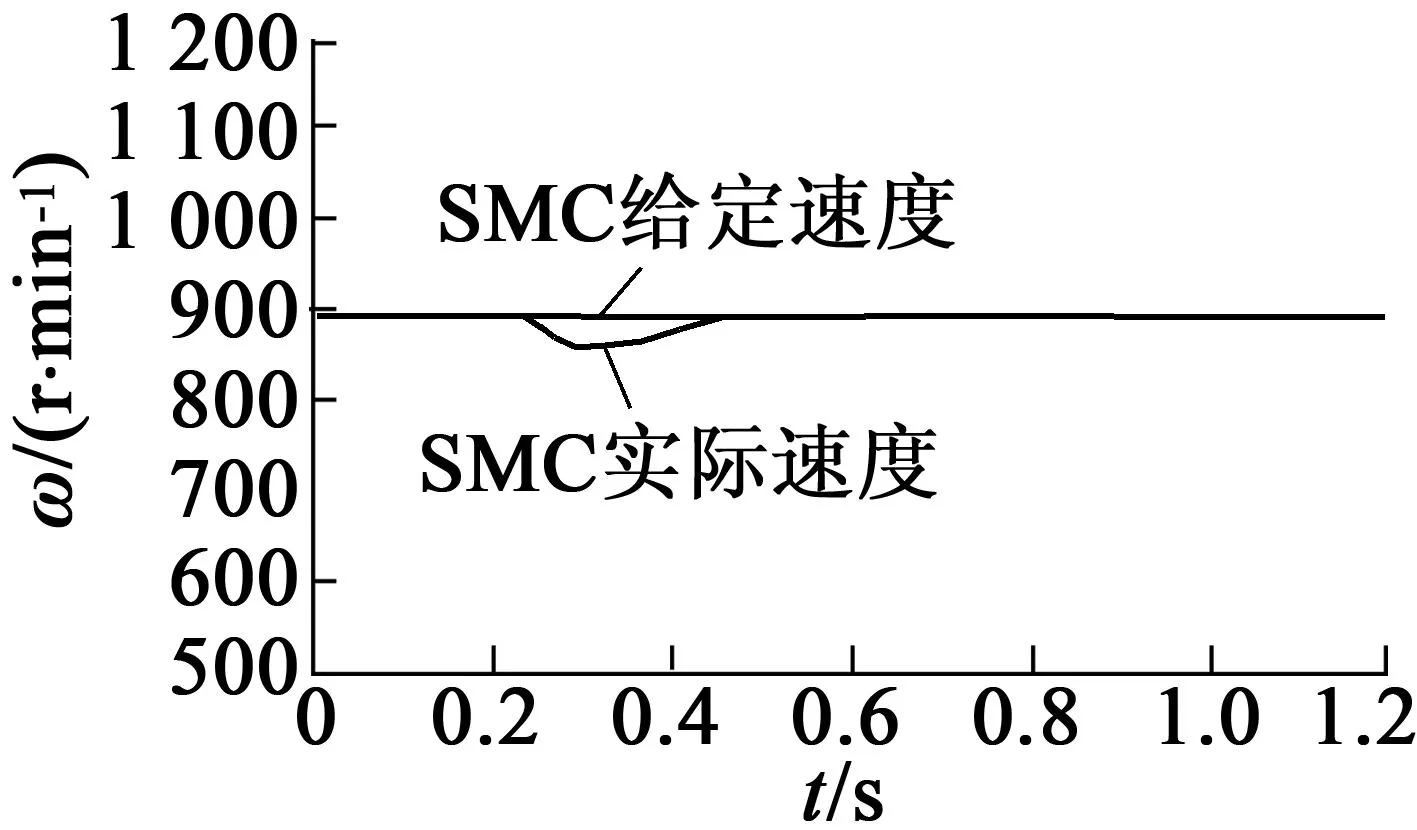
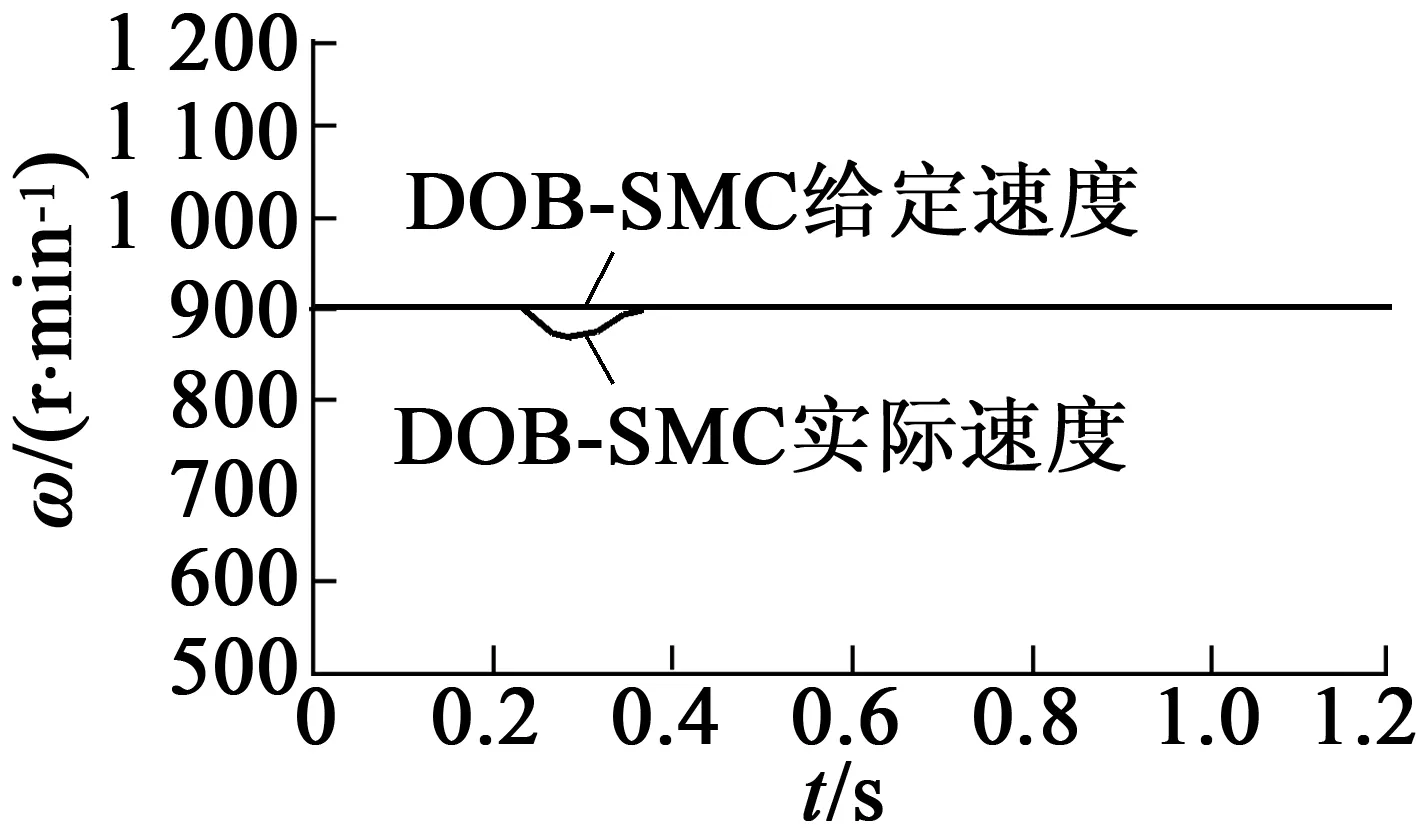
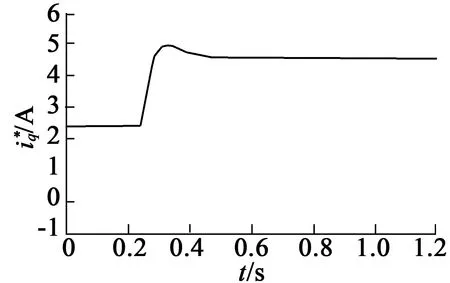
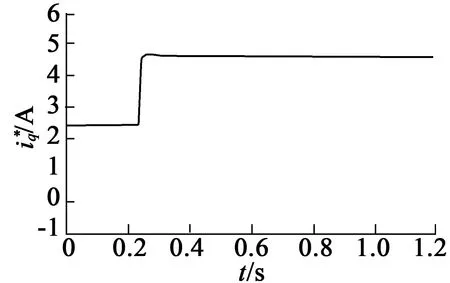
電機初始速度為1 000 r/min,負載為5 N·m,在0.25 s時將負載轉(zhuǎn)矩增加至10 N·m,傳統(tǒng)SMC與DOB-SMC速度響應與控制器輸出的q軸參考電流分別如圖11、圖12所示。圖11(a)中,在0.25 s時,負載轉(zhuǎn)矩增加到10 N·m時,傳統(tǒng)SMC速度最低為860 r/min,在0.48 s時達到穩(wěn)定,調(diào)節(jié)時間為0.23 s;圖12(a)為傳統(tǒng)SMC輸出的q軸參考電流,最大為5 A。由圖11(b)為基于DOB-SMC速度最低為880 r/min,在0.35 s時達到穩(wěn)定,調(diào)節(jié)時間為0.1 s,圖12(b)為基于DOB-SMC輸出的q軸參考電流,最大為4.8 A。由此可得出,本文的方法控制效果明顯,具有較高的跟蹤精度和響應速度。
(a) SMC
(b) DOB-SMC
(a) SMC
(b) DOB-SMC
4 結(jié) 語
本文采用滑模變結(jié)構(gòu)控制與DOB相結(jié)合的控制方法,利用基于指數(shù)趨近律的SMC,進一步提高電機系統(tǒng)靜態(tài)和動態(tài)跟蹤性能,通過基于DOB的反饋控制器來補償負載干擾,提高系統(tǒng)的快速響應性,從而使PMSM控制系統(tǒng)具有更好的魯棒性。仿真與實驗結(jié)果表明,本文的方法與普通的滑模變結(jié)構(gòu)控制相比,速度達到穩(wěn)定的時間縮小一半,并且速度的過沖幅度進一步減小。因此本文的方法具有較高的跟蹤精度和響應速度,對參數(shù)變化和外部擾動的魯棒性強,具有較高的綜合控制性能。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32