基于整車卡爾曼觀測器的主動懸架控制研究
2019-02-22 07:46:02季云華汪若塵丁仁凱孟祥鵬
重慶理工大學學報(自然科學) 2019年1期
季云華,汪若塵,丁仁凱,孟祥鵬
(江蘇大學汽車與交通工程學院,江蘇鎮(zhèn)江 212013)
傳統(tǒng)被動懸架由于其阻尼剛度不可調(diào),只能在特定路況下處于最佳工作狀態(tài)[1],而主動懸架能根據(jù)不同的路況進行主動控制,從而在很大程度上提高動力學性能[2]。常見的主動控制方法有天棚控制[3]、LQG控制[4]、PID控制[5]、神經(jīng)網(wǎng)絡(luò)控制[6]等。其中天棚控制較為簡單且能最大限度地提升車輛的舒適性,但會增大輪胎動載荷,影響車輛的操縱穩(wěn)定性。改進天棚控制是在天棚控制的基礎(chǔ)上加入被動阻尼以減小天棚控制對輪胎動載荷的惡化[7]。
(2)施工必須權(quán)責分明,使施工人員明確自己的職責,施工出現(xiàn)滲漏問題,往往都是施工不當所引起的所以,在施工中如果工程質(zhì)量出現(xiàn)了問題,要立刻能夠找出責任人,對其進行責任追究,這樣可以最大程度的減少施工質(zhì)量問題的出現(xiàn)。
改進天棚控制需要依據(jù)精確的簧上質(zhì)量絕對速度以及懸架相對速度信號來進行控制[8]。現(xiàn)有傳感器很難對線速度進行采集,且通過對加速度積分以獲得速度會導致最終誤差過大。為了獲得精確的速度信號,需要建立狀態(tài)觀測器對改進天棚所需的速度信號進行估計。卡爾曼濾波算法通常被用來對線性定常系統(tǒng)的狀態(tài)變量進行估計,如文獻[9-11]對懸架狀態(tài)進行估計。但這些研究僅針對1/4懸架進行估計,且建立的懸架模型為連續(xù)系統(tǒng),而在實際應用中傳感器采集的是離散信號,并且現(xiàn)在還沒有相關(guān)研究針對的是改進天棚控制的整車狀態(tài)估計。
本文針對以上問題,建立了整車七自由度模型,進一步將整車定常連續(xù)系統(tǒng)進行精確離散化,利用卡爾曼濾波算法設(shè)計了基于改進天棚控制的整車卡爾曼觀測器。卡爾曼觀測器可利用整車中7個加速度信號(質(zhì)心垂直加速度、車身俯仰角加速度、車身側(cè)傾角加速度以及各懸架簧下質(zhì)量加速度)估計出各懸架頂端簧上質(zhì)量的絕對速度信號以及各懸架的相對速度信號,并將這些速度信號作為反饋輸入至改進天棚控制算法中,從而對整車懸架進行控制。
1 整車動力學模型
1.1 整車模型
圖1為包括質(zhì)心垂向、俯仰、側(cè)傾運動以及4個車輪垂向運動的七自由度整車模型。
進一步推導出整車各自由度的運動微分方程:
四十多歲,就疾病纏身,這種遭遇,大抵是悲催的。以至于我長時間處在一種憂慮與焦躁的狀態(tài)當中。戒酒是必須的。有幾次,在瀘州和畢節(jié),都是產(chǎn)好酒的地方,卻不敢再喝一口。因此,我特別懷念自己還可以喝酒時候的某種癲狂狀態(tài)。其實,酒解決和帶入的是人生的混沌境界,這種混沌是激越和亢奮的,也是歡樂與豐富的,就像去掉了肉身,進入到了純粹的靈魂仙境一般。
根據(jù)文獻[12]建立左右輪距特性下的前軸雙輪路面輸入模型,仿真得到前軸兩側(cè)輪胎所受到的路面激勵,見圖2。
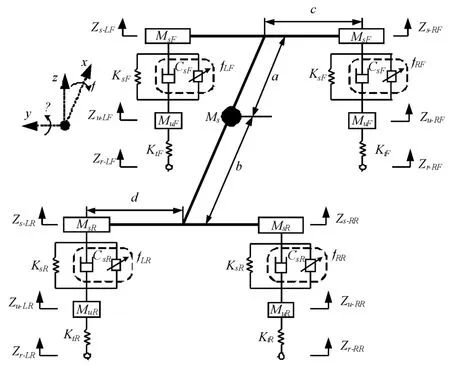
圖1 整車動力學模型
1.2 懸架模型
理想天棚控制是在簧上質(zhì)量上增加一天棚阻尼Csky與虛擬的固定物相連,阻尼器產(chǎn)生的阻尼力能抑制簧上質(zhì)量的運動,因此能提高車身的舒適性,不過這部分阻尼力會加劇輪胎的運動,使得輪胎動載荷加大。改進天棚控制是在理想天棚控制的基礎(chǔ)上增加1個被動阻尼Cs,能減小理想天棚控制對輪胎動載荷的影響。
各懸架改進天棚控制輸出的控制力分別為:

朗讀是用清晰、響亮的聲音把文章讀出來,以傳達文章思想內(nèi)容的活動。教學實踐表明,大多數(shù)不會朗讀課文的學生都缺少對語文學習的興趣。
加上彈簧力之后,整車各懸架力分別為:

式中:Ksj(j=F,R)表示前/后懸彈簧剛度。
由平均受教育年限的四分位圖可見,中國各省的教育水平在空間區(qū)域的分布上存在著一定的共性,即可能存在空間相關(guān)性,為進一步分析教育程度的空間相關(guān)性,以基于數(shù)據(jù)的全局Moran指數(shù)I和局部空間Moran指數(shù)LISA來測度空間觀測單元的整體及局部聚集程度。
式中:Csj(j=F,R)表示前/后懸被動阻尼系數(shù);Cskyj(j=F,R)表示前/后懸天棚阻尼系數(shù)。
1.3 路面模型
左前輪胎所受的路面激勵的微分方程分別為:

式中:f0為下截至空間頻率,f0=0.011 m-1;v為車速,v=20 m/s;n0為參考空間頻率,n0=0.1 m-1;G0為路面不平度系數(shù),在C級路面上行駛時G0=256×10-6m3。
式中:Ms為簧上質(zhì)量總重;Muj(j=F,R)表示為前/后懸簧下質(zhì)量;Iθ、Iφ分別為俯仰轉(zhuǎn)動慣量、側(cè)傾轉(zhuǎn)動慣量;Kt為輪胎剛度;a/b、c/d分別為前/后軸至車身質(zhì)心距離、1/2前/后輪輪距;Zs、θ、φ分別為簧上質(zhì)量質(zhì)心位移、俯仰角、側(cè)傾角;Zs-ij(ij=LF,RF,LR,RR)為各懸架頂部位移;Zu-ij(ij=LF,RF,LR,RR)為各輪胎位移;Zr-ij(ij=LF,RF,LR,RR)為各輪胎受到的路面激勵;Fij(ij=LF,RF,LR,RR)為懸架與車身連接點的懸架力。
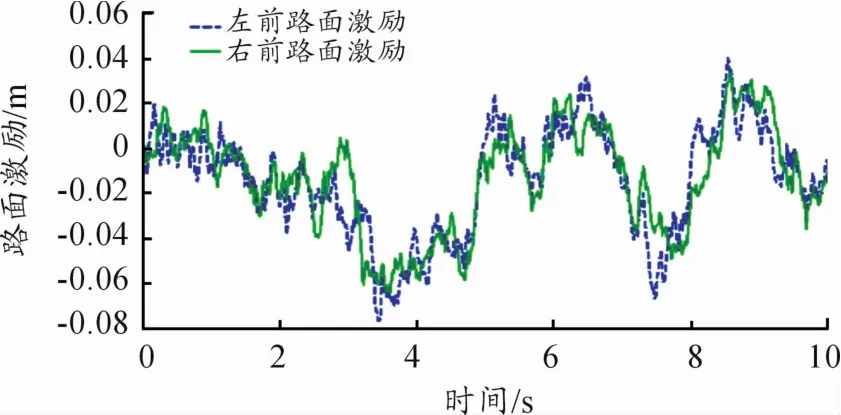
圖2 路面激勵
當車輛沿直線勻速行駛時,后軸輪胎與前軸輪胎受到的路面激勵存在固定時差,其值為(a+b)/v。
2 整車卡爾曼觀測器
層次加權(quán)分析法缺點有,評價的主觀臆斷性及其過程的隨機性,從而使得結(jié)果的可信度降低。此外,當判斷因素較多時,常常會因為層次分解和賦值的不一致而出現(xiàn)判斷矩陣不一致的現(xiàn)象。
2.1 系統(tǒng)狀態(tài)方程
在實驗中,由于線速度較難測得,為了提高控制精度,可依據(jù)卡爾曼濾波原理,通過可精確測得的加速度信號將速度信號估計出。為了構(gòu)建卡爾曼觀測器,結(jié)合式(1)~(5),構(gòu)建車輛狀態(tài)方程:


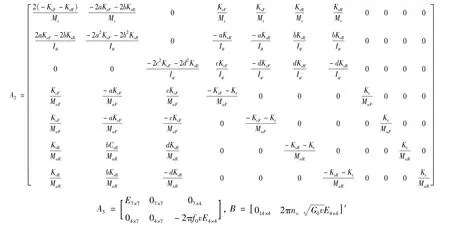
2.2 連續(xù)系統(tǒng)離散化
由于式(6)為線性定常連續(xù)系統(tǒng),而實際傳感器采樣的是離散型信號,因此需要將狀態(tài)空間模型進行離散化。通常連續(xù)系統(tǒng)的狀態(tài)方程的求解方程為:
由于W(τ)為路面白噪聲,其均值為0,假設(shè)在同一采樣周期內(nèi)其值不變則可推出:
這個案例說明,把注意力投入在一件喜愛的事情上,是有療愈功效的。它能讓原本趨于混亂的精神能量變得有秩序,讓人重拾生活的熱情和意義。
式中:X(k|k-1)是利用上一狀態(tài)預測的結(jié)果;X(k-1|k-1)是上一狀態(tài)最優(yōu)結(jié)果。之后進行協(xié)方差更新:
現(xiàn)在只考慮在采樣時刻t=kT和t=(k+1)T時刻之間的狀態(tài)響應,即對式(7)取 t0=kT,t=(k+1)T,可得:
進一步分析可知式(6)離散化成立的條件為:Φ(T)=exp(AT)。由于離散化的對象為動態(tài)的狀態(tài)方程,而式(6)中輸出狀態(tài)方程為靜態(tài)的代數(shù)方程,其離散化之后保持不變,令 G=(At)d t)B1,H=C,最后得到離散化之后的系統(tǒng)狀態(tài)方程為:

2.3 卡爾曼濾波算法
式(11)的輸出的狀態(tài)參數(shù)為加速度信號,實際傳感器測得的加速度信號都帶有測量噪音,因此為了使模型更接近實際,需對式(11)中輸出狀態(tài)加入測量噪聲V(k)。路面輸入的白噪聲W(k)以及測量噪聲V(k)的均值都為0、方差陣分別為Q與R,且W(k)與V(k)不相關(guān)。最終,得到卡爾曼濾波器的狀態(tài)方程與觀測方程分別為:
由于加速度傳感器測量精度高,在整車中可用來測量各位置的加速度信號。受技術(shù)限制,準確的速度信號一直較難獲得,因此對天棚或改進天棚控制的實際實施帶來困難。卡爾曼濾波可根據(jù)傳感器獲得的觀測信號對相關(guān)狀態(tài)變量進行估計或預測。為了獲得精確的速度信號,本文利用卡爾曼濾波算法設(shè)計了改進天棚控制的整車狀態(tài)觀測器。

利用卡爾曼濾波算法進行狀態(tài)估計時,需對現(xiàn)在狀態(tài)進行預測。首先,進行過程更新:

三、沒破壞倉庫的任何一處,連窗戶上的蛛絲也沒碰一下,沒留下任何腳印,連個鬼影子都沒有,而倉庫里的東西又明明丟了,進貨我守著,出貨我點著,到底是鬼還是神鉆了空子?難道真如大家說的,這塔公村里居住更多的菩薩和鬼怪,真是菩薩和鬼怪淪到要干這下賤的活?哎!再怎么說,我都不會相信這世上真有什么鬼神,即使有,那也投胎在人心里。
從業(yè)近20年的殷紅妹,為了讓老百姓直觀了解和掌握簡易鑒別藥品真?zhèn)蔚闹R,她編制了宣傳冊,制作真?zhèn)沃兴帉嵨锖驼构瘢弥苣r間參與社會和大眾組織的志愿者活動。

式中:P(k|k-1)是 X(k|k-1)對應的協(xié)方差;P(k-1|k-1)是 X(k-1|k-1)對應的協(xié)方差。之后計算卡爾曼增益:

進一步對狀態(tài)進行更新:

最后計算k狀態(tài)時的協(xié)方差:

3 仿真驗證
為了驗證基于卡爾曼濾波的改進天棚控制策略的性能,在Simlink中建立了的整車模型控制框架,見圖3。整車模型將其質(zhì)心加速度、俯仰角加速度、側(cè)傾角加速度以及各簧下質(zhì)量加速度輸入至卡爾曼觀測器中,卡爾曼觀測器實時估計出各懸架頂端的絕度速度以及各懸架的相對速度。之后將卡爾曼觀測器估計的速度信號輸入至改進天棚控制算法中,經(jīng)過計算,得出各懸架的控制力信號并輸入至懸架系統(tǒng)中。最后懸架系統(tǒng)輸出改進天棚控制力至整車模型中。通過對某車輛進行測量,得到車輛參數(shù)見表1。
在將卡爾曼觀測器估計的速度信號輸入至改進天棚控制算法之前,首先需要驗證卡爾曼觀測器的估計精度。為此在Simulink中將整車模型中的實際速度信號與卡爾曼觀測器估計的速度信號進行對比,結(jié)果如圖4~11所示。
中南佛州水利工程的設(shè)計與施工完全由聯(lián)邦政府主導,到20世紀70年代基本竣工。從本質(zhì)上講,該項目有很大的應急成分,因此,在應用、管理過程中一些過去沒有考慮到的問題逐漸顯現(xiàn)。
由圖4~11可看出:無論是各懸架頂端的絕對速度還是各懸架的相對速度,卡爾曼觀測器的估計值與實際值相差都非常小,驗證了所設(shè)計的整車卡爾曼觀測器的估計精度非常理想。
與航磁異常類似,本區(qū)地面磁場總體上亦呈近EW向展布,其中測區(qū)南部和中北部宏觀上表現(xiàn)為NWW—近EW向的帶狀低磁異常,而中東部呈NNE—近SN向相對高磁異常,反映二者所處地質(zhì)背景不同,結(jié)合地球物理和區(qū)域地質(zhì)特征,推測前者分別為高山、寶山巖體及其隱伏巖體引起,而后者主要為NNE向的構(gòu)造所致。其中在圖幅西南部的高山巖體及其隱伏地帶磁場相對較平穩(wěn),說明該地帶后期巖漿活動較少、巖體相對較單一;而在圖幅東北部的寶山巖體及其隱伏地帶磁場變化大、形態(tài)復雜,反映構(gòu)造發(fā)育、巖漿作用頻繁,成礦地質(zhì)條件更為有利。此外,研究區(qū)中南部NWW—近EW向的條帶狀高磁異常帶為高壓輸電線等人文干擾引起的假異常。

圖3 控制框架

表1 整車系統(tǒng)參數(shù)
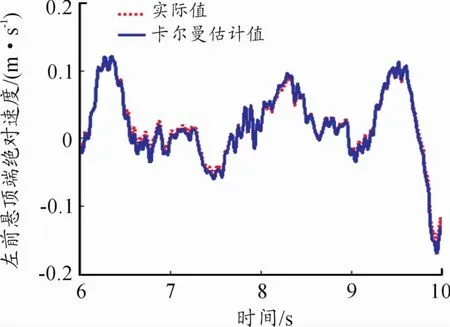
圖4 左前懸絕對速度
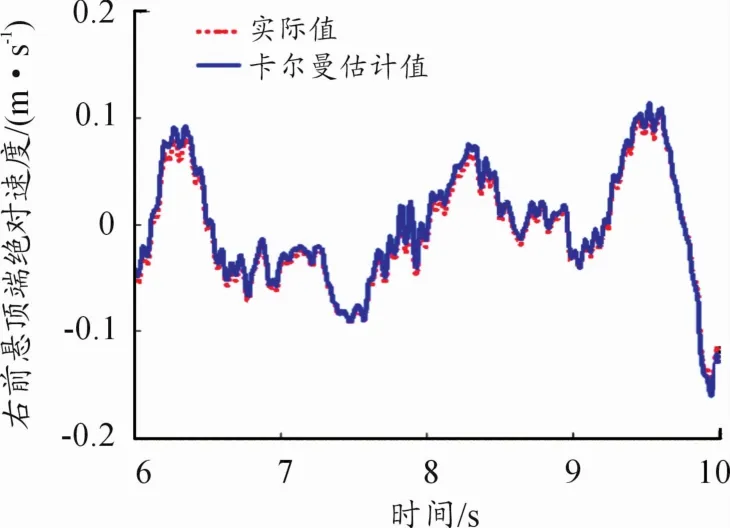
圖5 右前懸絕對速度
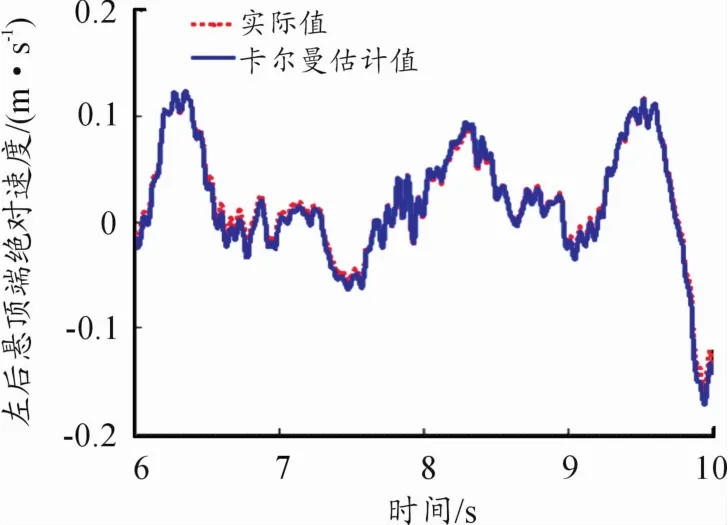
圖6 左后懸絕對速度
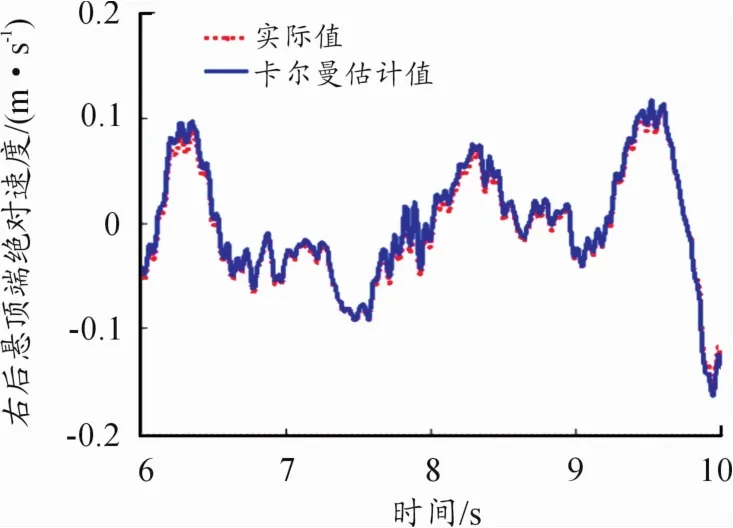
圖7 右后懸絕對速度
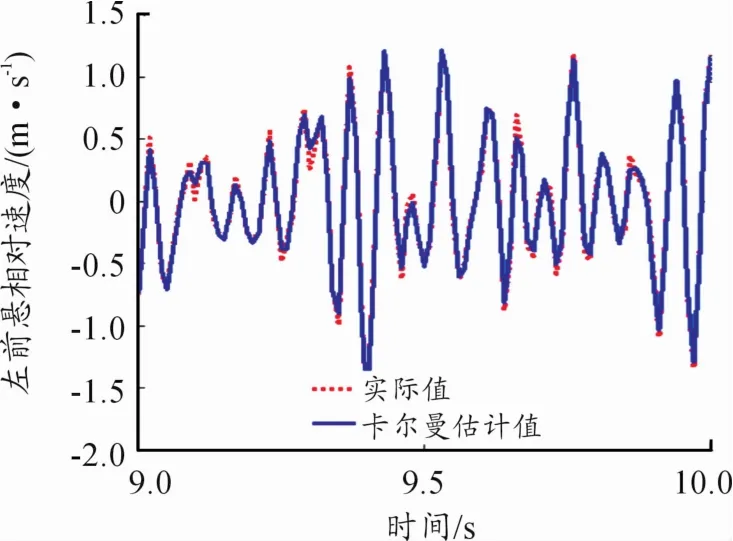
圖8 左前懸相對速度

圖9 右前懸相對速度
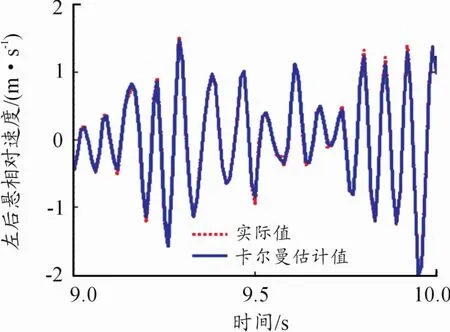
圖10 左后懸相對速度
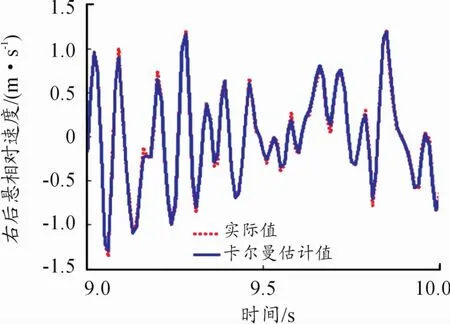
圖11 右后懸相對速度
進一步將卡爾曼觀測器所估計的速度信號代替模型中的實際速度信號,輸入至改進天棚控制算法中,以驗證基于卡爾曼觀測器的改進天棚控制懸架性能。將傳統(tǒng)被動懸架與無卡爾曼觀測器的改進天棚控制懸架以及基于卡爾曼觀測器的改進天棚控制懸架進行整車性能比較,仿真結(jié)果如表2和圖12~16所示。
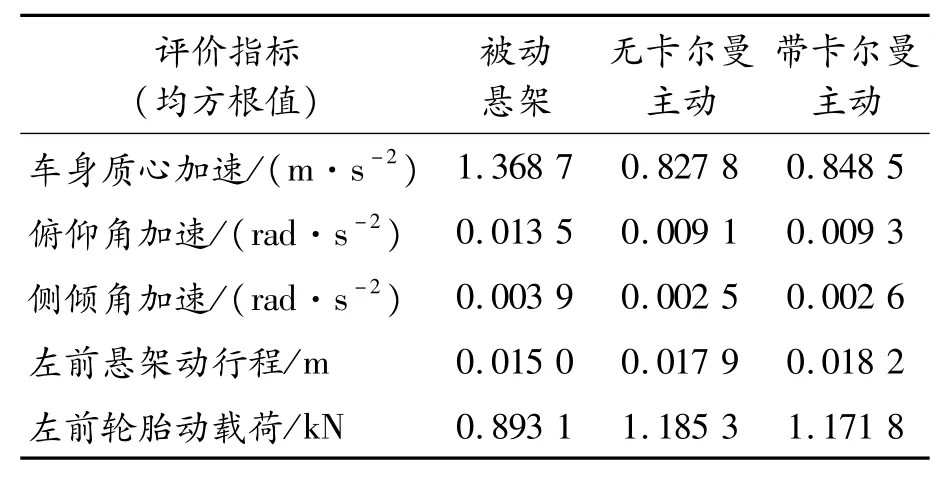
表2 仿真結(jié)果
結(jié)合表2與仿真圖12至圖16可知,與無卡爾曼濾波的改進天棚控制懸架相比,利用卡爾曼觀測器估計出的速度信號進行改進天棚控制懸架的性能基本沒有產(chǎn)生惡化,進一步驗證了所設(shè)計的卡爾曼觀測器狀態(tài)估計的精確性。
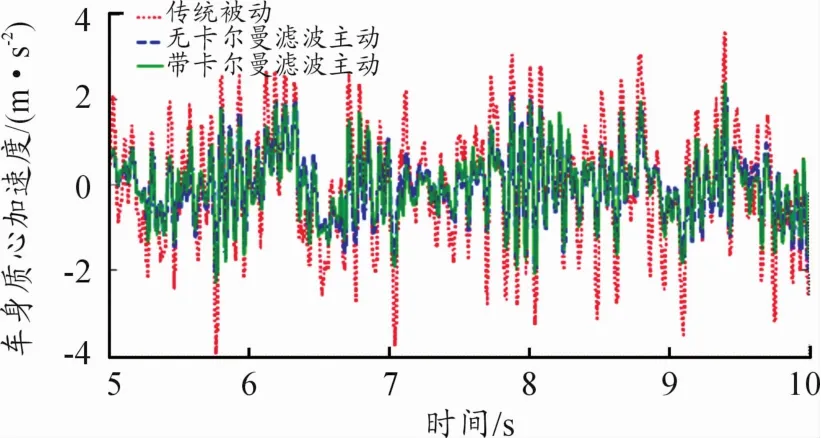
圖12 車身質(zhì)心加速度
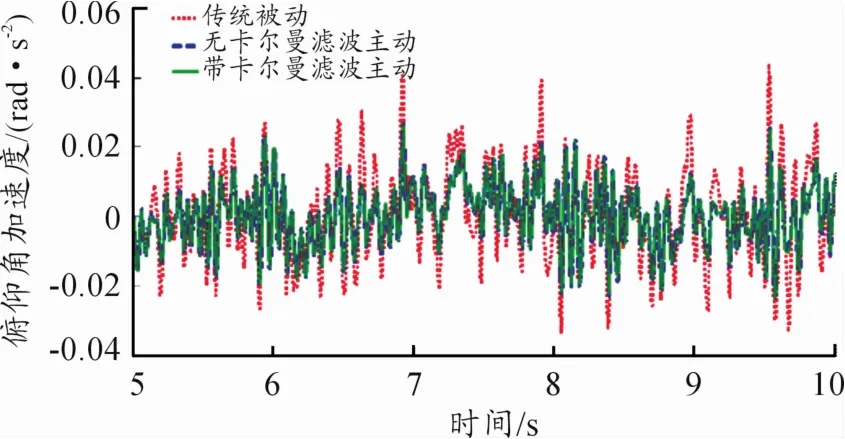
圖13 俯仰角加速度
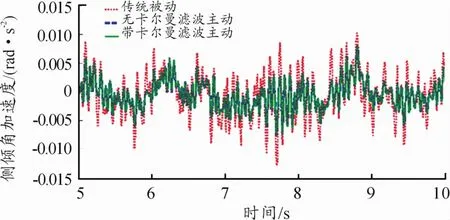
圖14 側(cè)傾角加速度
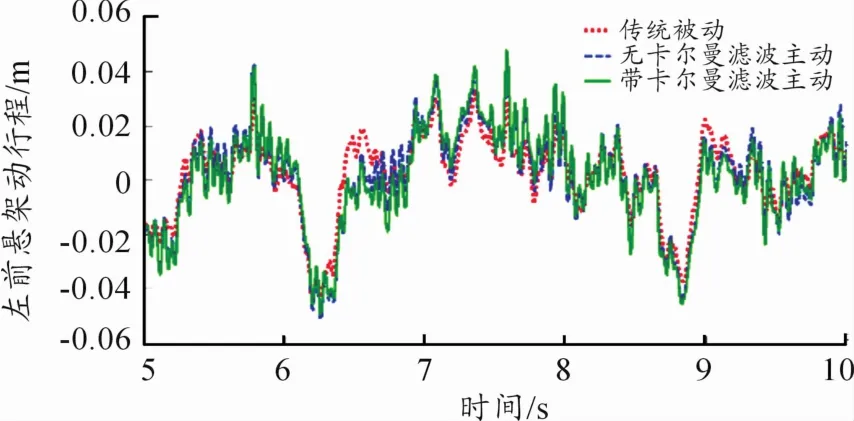
圖15 左前懸架動行程
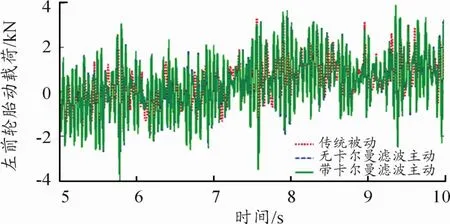
圖16 左前輪胎動載荷
帶卡爾曼濾波的改進天棚控制懸架較傳統(tǒng)被動懸架,車身質(zhì)心加速度降低了38.01%,俯仰角加速度降低31.11%,側(cè)傾角加速度降低33.33%,從而表明帶卡爾曼濾波的改進天棚控制懸架能夠大幅度提高車輛的乘坐舒適性。與傳統(tǒng)被動懸架相比,帶卡爾曼濾波的改進天棚控制的懸架動行程惡化21.33%,但最大值依舊保存在6 cm以內(nèi),不會對懸架使用壽命產(chǎn)生影響。由于改進天棚控制中天棚控制阻尼會加劇輪胎的損耗,因此輪胎動撓度惡化31.20%。
4 結(jié)束語
將整車定常連續(xù)狀態(tài)方程進行精確離散化之后,利用卡爾曼濾波算法設(shè)計了基于改進天棚控制下的整車卡爾曼觀測器,以估計各懸架的速度信號。通過Simulink進行仿真,驗證了卡爾曼觀測器的估計精度。之后,將卡爾曼觀測器所估計的速度信號替代模型中的實際速度信號輸入至改進天棚控制算法中,從而對懸架進行控制。
最終結(jié)果顯示:利用卡爾曼觀測器估計的速度信號對各懸架進行改進天棚控制,其控制效果沒有產(chǎn)生惡化。因此,利用所設(shè)計的卡爾曼觀測器可精確地估計出改進天棚所需的速度信號,從而可減少整車傳感器使用量,可進一步節(jié)約成本,并提高控制算法的可行性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(shù)(2016年9期)2016-02-27 09:05:39