物聯網視頻感知節點的動態同步建模與仿真
2019-02-08 07:35:58劉曉霞李芳
軟件工程 2019年1期
關鍵詞:物聯網
劉曉霞 李芳
摘? 要:針對物聯網視頻感知的動態同步問題,本文用π網理論建立了物聯網視頻感知的抽象模型DSAM,以描述其動態同步問題。首先建立基于π網的物聯網視頻感知抽象模型DSAM,然后對模型進行了狀態演變、模型變遷和動態交互等分析,最后利用模型DSAM對實例進行分析和仿真。通過對模型DSAM的仿真和分析可知,該模型能夠正確處理物聯網視頻感知的動態同步并發性,具有一定的實用價值。
關鍵詞:π網;視頻感知;物聯網;同步模型;動態演化
中圖分類號:TP393? ? ?文獻標識碼:A
Dynamic Synchronous Modeling and Simulation of Video
Sensing of Internet of Things
LIU Xiaoxia1,LI Fang2
(1.Department of Information Engineering,Sichuan Water Conservancy Vocational College,Chongzhou 611231,China;
2.College of Computer Science,Chongqing University,Chongqing 400044,China)
Abstract:Aiming to solve the dynamic synchronous problems in the video sensing of Internet of Things,the paper establishes a Dynamic Synchronization Abstract Model (DSAM) based on the π-nets theory to describe the dynamic synchronous problems.At first,the DSAM of the video sensing of Internet of Things is established based on π nets.And then this paper analyzes state evolution,model transition and dynamic interaction.At last,The DSAM is used to analyze and simulate examples.Through the analysis and simulation of the DSAM,it is known that the model can be used to correctly deal with the dynamic synchronous concurrency of the video sensing of Internet of Things,and it has certain practical value.
Keywords:π-nets;video sensing;Internet of Things;synchronization model;dynamic evolution.
1? ?引言(Introduction)
隨著信息與通信技術的發展,物聯網技術不斷在現代城市中得以應用。物聯網視頻感知系統是一個綜合系統,具有其自身的特點,如連續交互性、服務機制與質量和多種媒體信息的實時性、同步性等,其中物聯網視頻感知信息的實時性和同步性是其關鍵性問題。
而物聯網視頻感知各種信息的同步問題,主要是各種信息間的同步模型和同步機制的問題,前者主要描述各種信息間的時態關系,后者主要描述信息間時態關系的保證方法。就目前國內外學者的研究而言,各種信息間的同步模型主要有時間軸同步模型、分層層次同步模型和共同時間參考點同步模型。在同步模型中,使用Petri網進行表述的、已提出的具有代表性的模型主要有OCPN、XOCPN[1]、TSPN[2]、FTPN[3]和DTPN[4]。
物聯網視頻感知系統要求各種信息間動態同步特性,而動態同步特性表現為可接受的扭曲時間、用戶操作時間的動態性和延遲敏感性三個方面。而基于Petri網的模型未完善系統的動態同步問題。因此,本文應用π網理論,提出一種物聯網視頻感知動態同步抽象模型DSAM,以解決系統的動態同步問題。
2? ?模型建立(Model establishment)
2.1? ?π網
1962年,德國的Carl Adam Petri博士在其博士論文中提出Petri網,其目的是研究信息系統及其相互關系的一種數學模型。Petri網現已成為具有嚴密數學基礎的一種數學和圖形工具,可用于對具有異步、分布和并發特征的系統。20世紀90年代,由Robin Milner等人提出了一種新的并發理論—π演算(π-calculus),用于研究計算機并行理論領域的并發計算模型,描述系統的動態特性。
文獻[5]提出了將Petri網與π演算結合的π網,并給出了π網的定義、規則和形式化描述語言等,本文利用π網來研究物聯網視頻感知動態同步問題,以保證物聯網視頻感知系統的正常交互,并充分發揮和利用Petri網和π演算的互補性,而且也是現代形式化研究方法的發展趨勢。
2.2? ?模型建立
物聯網視頻感知系統是一個典型的并發型動態系統。利用π網,建立了一種物聯網視頻感知動態同步抽象模型DSAM(Dynamic Synchronization Abstract Model)來描述其動態同步特性。
定義1 定義DSAM為一個π網,即,其中,表示一個基本的令牌Petri網系統,為物聯網視頻感知的庫所集;X={X1,X2,X3,…}表示交互按鈕的集合,是物聯網視頻感知信息的變遷集合,不同的按鈕代表不同的變遷;且;Tt表示物聯網視頻感知同步變遷的時間關系集合,是網DSAM的弧集,且;是定義在上的一個屬性函數,表示位置集合的映射關系集合。
CP為一個六元組,即CP=(P,T,B,F,ID,M:M0)為一個基本Petri網,網中僅有“Normal”和“Master”兩種類型的位置。其中:P是一個位置集合;T為變遷集合;B:P×T→I,I={1,2,3,…},表示從位置到變遷的有向弧集;F:T×P→I,I={1,2,3,…},表示從變遷到位置的有向弧集;M:P→I是網系統的標識,I={0,1,2,…},M0是初始標識;為OPN(Object-oriented Petri Nets,OPN)元,即,其中為基本Petri網定義的元,為的托肯;為演算描述的DSAM模型的演化因子。
X={X1,X2,X3,…}為交互按鈕集,共有六種按鈕:“Skip”“Pause”“Back”“Replay”“Restart”和“Modify Speed”。
Tt主要描述物聯網視頻感知系統的同步時間變遷的時間關系的集合,可利用TPN(Time Petri Net)可形式化定義Tt。
依據文獻[6],DSAM符合π網的定義,是一個π網。在此還需對進行定義,以更加完善的描述DSAM模型。
定義2 為時間關系集合,是一個TPN網的擴展,即:
其中,為物聯網視頻感知系統的有限庫所的集合。
為物聯網視頻感知系統的時間動態變遷的有限集合,且滿足條件。
表示物聯網視頻感知系統中各種信息數據的有限變遷集合,且滿足。
是控制流的弧的集合,Fdf是數據流的弧的集合,表示系統的動態關系。
為到同步變遷規則的映射。
,即動態時間變遷集合到有限庫所的映射關系,且滿足。
,為時間映射函數,R+是正實數集。
為變遷與其相關聯的交互按鈕集合X的映射函數關系,即,可定義為。
依據前面建立的模型,利用圖形化描述方法,可得到模型DSAM的圖形化描述圖。在的同步時間約束下,使得令牌發生變遷,在物聯網視頻數據幀的交互操作下,使得變遷進一步發生轉移,得到如圖1所示的模型DSAM的圖形描述。
3? ?模型分析(Model analysis)
利用π網理論,分析DSAM模型的狀態演變、變遷和動態交互。
3.1? ?狀態演變
在研究DSAM模型時,首先要分析模型的狀態,給出該模型的狀態集合,然后在狀態基礎上對模型進行狀態演變研究,給出狀態演變規則。
定義3 模型狀態集定義:DSAM的狀態集用Ss表示,則Ss為一個三元組,即,其中:為模型中含有token的位置集合;為模型中各種信息的動態有效時間段表,表中數量與標記的位置數一致,若某時刻用戶進行了暫停操作,則中的數值為該位置剩余的時間值;用戶將要操作的按鈕表,即記錄用戶從現在時刻到結束可選的操作。
規則1 狀態演變規則:假設是狀態Ss在相對時間使能的變遷,則模型可在動態有效時間發生變遷,并演變為新的狀態,即,其中:
①。
②是標記的位置所具有的動態相對有效時間段表,設為庫所在狀態Ss呈現的時間間隔,則滿足:
(i);
(ii)
③
其中,為變遷的輸入位置。
3.2? ?模型變遷
模型DSAM的變遷主要有“Key”型變遷和非“Key”型變遷[7]。
定義4 變遷發生條件:設在時間內,變遷在內的時間點的觸發由狀態決定,則必須滿足:
①在時間點被使能:;
②滿足:。
當滿足定義4給出的變遷條件時,變遷并不能發生,因為還需要時間因子。定義2可知,若時間Tt符合并滿足TPN網要求,則變遷就能夠發生[8]。
規則2 模型通信變遷規則:假設為模型DSAM的一對共軛變遷,若存在互補交互的網DSAM的兩個子網,且標識網DSAM的所有庫所狀態項的函數對任意兩個屬于Ss的狀態,均有:,
則t1和t2可在網DSAM中產生通信變遷,即,(表示庫所的輸入變遷、自由輸出變遷、受限輸出變遷、通信變遷和匹配變遷等各種信息間的變遷類型),使得,,,,且具有的規則為:
設,其中為物聯網視頻感知各種信息的編號,x為輸出庫所標號;y為輸出上的自由通道名;a為通道名的替換;則有:
①當時,則,且,。
②當,則,且,。
3.3? ?模型動態交互
對物聯網視頻感知系統而言,與用戶的動態交互,以實現物聯網視頻感知同步問題[9]。若變遷在接受用戶輸入按鈕時具有如圖2所示的交互操作實現示意圖(其中{X1,X2,X3,…}為交互按鈕集X)。
①“Skip”:若用戶輸入按鈕為“Skip”,則模型DSAM變遷即刻激活,且不正在執行的庫所是否完成語義。
②“Pause”和“Restart”:若用戶提交一個“Pause”,庫所接受一個令牌,同時進行Nop操作,直到下一個輸入交互為“Restart”。
③“Modify Speed”:若用戶在時刻輸入庫所的“Modify Speed”操作,則其結果為改變物聯網視頻感知各種信息的執行速度。
④“Back”:即用戶輸入了后退操作,其結果是直接退到上一個時刻或時間段的物聯網視頻感知信息。
⑤“Replay”:若用戶輸入為“Replay”按鈕,則模型DSAM表現為重新執行所操作的物聯網視頻感知的各種信息。
由以上分析可知,DSAM模型能夠很好地實現和完成媒體與用戶的動態交互。
4? 模型仿真與性能分析(Model simulation and
performance analysis)
4.1? ?實例仿真
為使用DSAM模型描述物聯網視頻感知動態同步問題,在此假設物聯網視頻感知系統為視頻、聲音、文本和動畫的復合數據流,媒體對象和子對象之間的時序關系如圖3所示。用戶通過交互按鈕集X完成與物聯網視頻感知各種信息進行交互。開始運行時可直接跳到進行表現,可“Pause”和“Restart”Vdo1的表現,可從Vdo3回到Vdo2進行表現,也可使am1重新表現[10]。
聲音、視頻的同步如圖4所示。聲音、視頻數據流速度為10幀/秒。QoS中最大扭曲為80ms,最大抖動為10ms。
4.2? ?異常處理
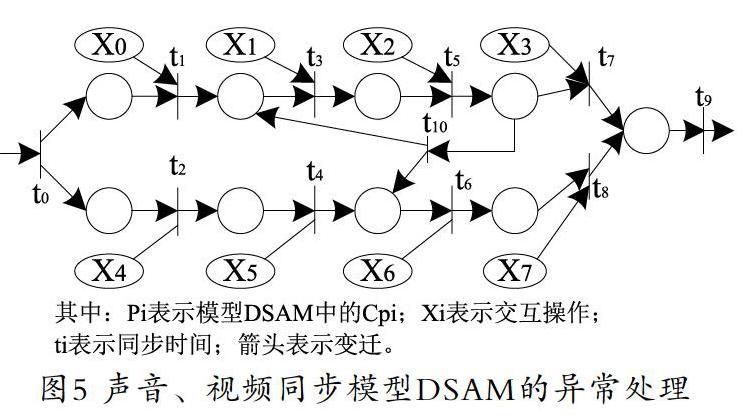
由實例仿真可知,QoS中的最大扭曲和最大抖動是使物聯網視頻感知各種信息難以完全同步所致,故需要對媒體數據流采用一定的方法進行處理。處理后的聲音、視頻如圖5所示。
在物聯網視頻感知同步通信中,由于信號衰減、干擾和延遲等造成數據丟失是不可避免的。仿真實例中,對聲音數據不能隨意丟棄音頻流的LDU,而引入抑止弧來進行異常處理;對視頻媒體流,丟失少量的數據對視頻QoS影響不大。因此,該模型能夠實現異常處理,對于一定程度的對象丟包具有魯棒性。
4.3? ?模型性能分析
對模型進行性能分析,先從媒體內部同步量化進行分析,然后從視頻信息間的同步量化進行分析。
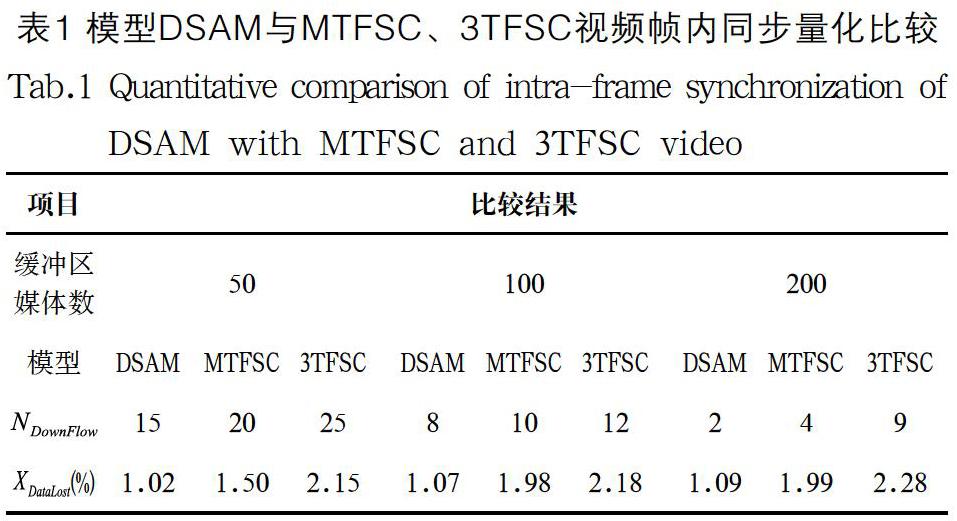
對視頻內部同步量化進行分析,其指標主要是緩沖區下溢次數和數據信息丟包率,經過實驗得到表1所示數據。從表1數據可知,模型DSAM在測試驗證時,得到的數據緩沖區下溢次數較其他兩種模型要少;視頻信息數據丟包率也較其他兩種模型的丟包率要低。因此,模型DSAM在視頻內同步控制方面具有一定的優越性。
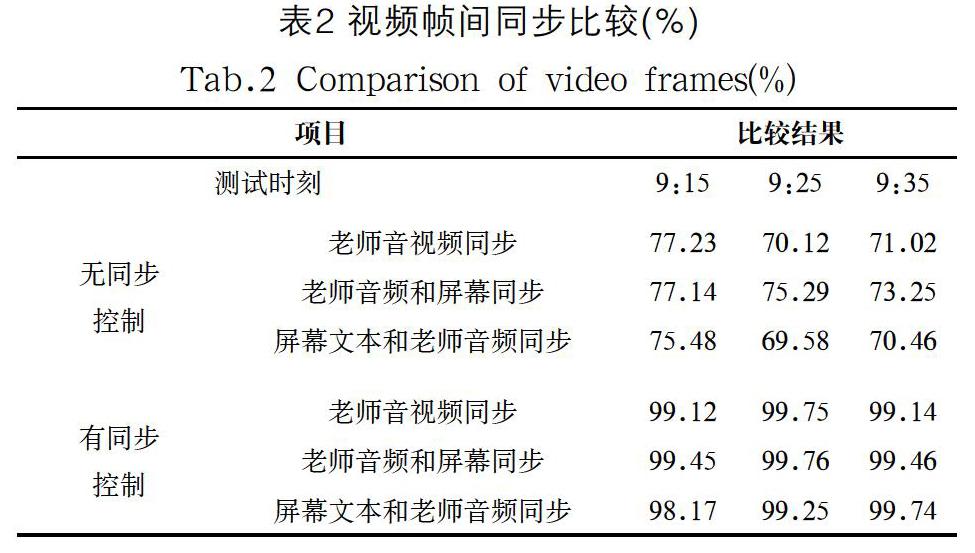
對視頻幀間同步進行量化測試,測試環境選用視頻圖像、語音、文本等,并在實驗條件下,對物聯網視頻感知教室的老師講課進行測試,以驗證視頻幀間同步。經過實驗,得到表2所示數據。從表2數據可知,無同步控制時,視頻幀間同步率較有同步控制時要低。
綜上分析可知,模型DSAM在視頻內同步控制和視頻幀間同步控制都具有優異的性能。
5? ?結論(Conclusion)
針對物聯網視頻感知動態同步問題,利用Petri網與π演算結合的π網,建立物聯網視頻感知系統抽象模型DSAM,實現對物聯網視頻感知系統的動態同步進行建模。通過對模型DSAM的仿真和分析可知,本文所提出和建立的模型,能夠正確處理物聯網視頻感知的動態同步,具有一定的實用價值。
參考文獻(References)
[1] Tan Kun,Shi Yuan-chun,Xu Guang-you.Supporting weak synchronization over world wide Web[J].Journal of Software,2000,11(7):863-866.
[2] 單志廣,楊揚,王任,等.擴展的時間流Petri網物聯網視頻感知模型[J].計算機研究與發展,2000,37(2):223-273.
[3] Han Yingjie,Sun Yong-qiang,Wu Zhe-hui.Fine-grained distributed multimedia synchronization model-Enhanced? Fuzzy-timing Petri net[J].Journal of Shanghai Jiaotong University,2001,E-6(1):62-66.
[4] Prabhakaram B,Raghavan S V.Synchronization models for multimedia presentation with user participation[P].Multimedia Systems,l994,2(2):53-62.
[5] 曹木亮.基于π-演算的Petri網和密碼協議的形式化分析[D].上海:上海交通大學,2007:20-75.
[6] 劉曉霞,李芳.物聯網智能感知節點π網低功耗軟硬件劃分建模[J].工礦自動化,2018,44(9):59-66.
[7] Bruscato L T,Freitas E P,Heimfarth T.Self-Correcting Time Synchronization Support for Wireless Sensor Networks Targeting Applications on Internet of Things[J]. IFAC-PapersOnLine,2016,49(30):355-360.
[8] Kim K S,Lee S,Lim E G.Energy-Efficient Time Synchronization Based on Asynchronous Source Clock Frequency Recovery and Reverse Two-Way Message Exchanges in Wireless Sensor Networks[J].IEEE Transactions on Communications, 2017,65(1):347-359.
[9] Stankovi? M.S.,Stankovi? S.S.,Johansson K H.Distributed time synchronization for networks with random delays and measurement noise[J]. Automatica,2018,93:126-137.
[10] 陳珍萍,黃友銳,唐超禮,等.物聯網感知層低能耗時間同步方法研究[J].電子學報,2016,44(1):193-199.
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
