基于多視覺傳感器的泊車輔助系統設計
2019-01-18 10:33:48郭劍鷹周小兵管西強
傳動技術 2018年4期
郭劍鷹 周小兵 管西強
(1.華域汽車股份有限公司,上海 200041;2.上海交通大學,上海 200240)
0 引言
隨著科學技術的飛速發展,汽車工業近年來面臨著重大革新,自動駕駛已經成為各大汽車廠商和高校的研究熱點[1-3]。根據自動駕駛技術分級,L1級別的輔助駕駛是目前最為可行技術方案。這其中,泊車輔助系統,已經逐漸成為各大汽車品牌在新產品中的標準配置[2]。然而,由于傳統的泊車輔助系統方案中,車位感知主要通過超聲波雷達進行。由于超聲波雷達的工作原理的局限性,使得該方案對于車位場景的適應性較差,例如前后均無車的停車場中,該方案無法檢測出車位,從而使得基于超聲波雷達的泊車功能失效。此外,由于超聲波雷達的抗干擾特性較差,對于車位尺寸及坐標的檢測精度也較差,進一步削弱了該方案的適用性[4]。
為了提高泊車輔助系統的適用范圍,本文基于傳統超聲波泊車輔助系統,提出一種更為精確的基于多視覺傳感器的車位檢測技術。相對于單攝像頭方案[5,6],本文提出的多視覺傳感器方案,不僅能夠實現車位的檢測成功率,還能通過多攝像頭在泊車過程中對車位尺寸進行修正,再結合泊車控制器,實現高精度高成功率的泊車輔助功能。
1 泊車輔助系統架構設計
基于多視覺傳感器的泊車輔助系統架構如圖1所示。該系統主要由感知系統、中央控制器、執行機構和人機交互系統等組成,其中車位識別通過感知系統實現,中央控制器利用感知系統獲得的車位及障礙物等信息,進行故障診斷、泊車控制和障礙無檢測處理等,并通過CAN總線將控制信號及顯示信號發送至人機交互系統和執行機構,通過人機交互系統對駕駛員進行選換檔、制動和停車的信息提示和報警提醒,利用執行機構對車輛的轉向執行機構進行自動控制,最終實現車輛的泊車輔助功能。
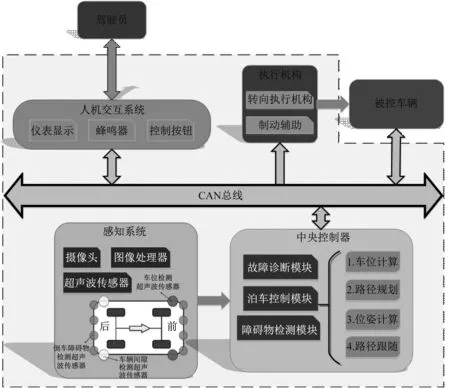
圖1 泊車輔助系統架構
該泊車輔助系統中的感知系統主要分為超聲波雷達和視覺傳感器(即廣角數字攝像頭),考慮到傳統超聲波雷達的車位檢測技術日趨成熟,本文主要針對感知系統部分中的多視覺傳感器技術進行研究分析,擬通過多攝像頭在泊車過程中對車位尺寸進行修正,再結合泊車控制器,實現高精度高成功率的泊車輔助功能。
2 基于視覺的車位檢測方法
基于視覺的車位檢測技術[5,7,8],其算法架構如圖2所示。首先,在泊車輔助系統運行后進行包括攝像機內外參數讀取、逆透視變換參數讀取以及環視鳥瞰圖參數的初始化。各參數初始化后,利用安裝在車身左右的兩路攝像機進行在線實時采集,并同時去畸變進行圖像矯正和逆透視變換,對生成的俯瞰圖進行圖像分割,然后通過設計的直線檢測算法進行車位檢測。
結合以上架構,本文對具體的算法步驟進行了詳細的設計,基于視覺的車位檢測與識別流程如圖3所示。
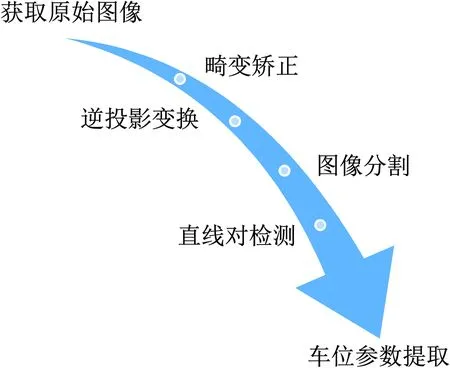
圖2 基于視覺的車位檢測算法架構
Fig.2 Vision-based parking space detection algorithm architecture
3 車位檢測關鍵技術
3.1 圖像灰度化
灰度轉化是常用的圖像處理方法,在灰度化的情況進行圖像處理不僅能夠節省內存,而且還能提高后續工作的效率。為了最大程度上減少失去的原圖信息,對彩色圖像進行灰度轉換,其公式表達為:
Gray=a×R+b×G+c×B
(1)
式中,a,b,c是灰度圖像中各顏色通道的權值。
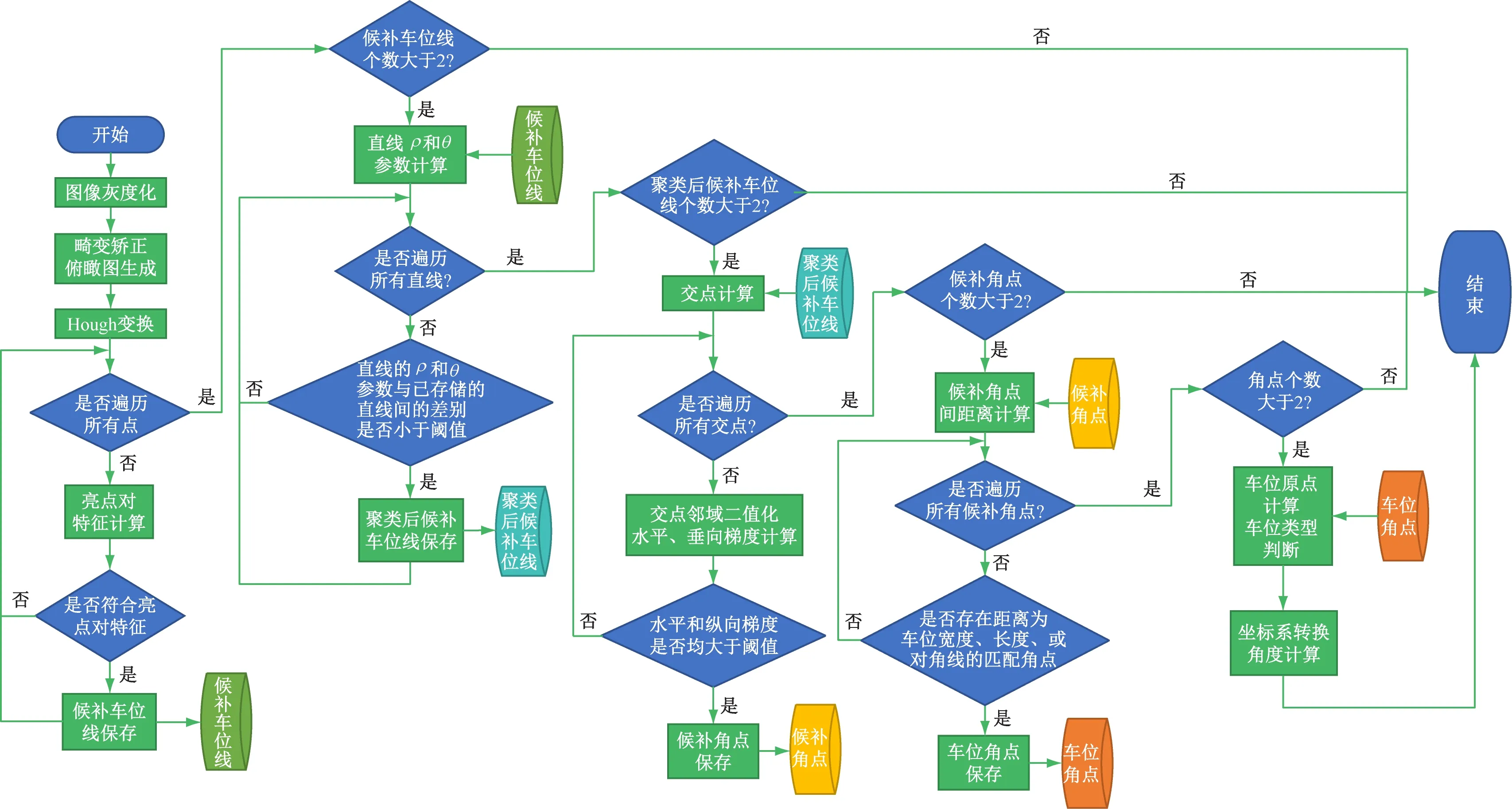
圖3 車位檢測與識別流程
車位線一般是黃色或白色的直線段,對于白色的車位線可采用傳統的灰度化方法,但是對于黃色車位線傳統的灰度化方法并不能很好的將車位線與背景分離開來。因此,本文對灰度化中各通道的加權值進行了分析對比,最終得出a=0.8,b=0.05,c=-0.6能得到比較好的灰度圖像。如圖4所示,改進后的灰度化方法更能突出目標車位線有利于后續車位線提取。

(a) 原始的灰度化效果
(b) 改進后的灰度化效果
Fig.4 Comparison of graying effects before and after improvement
3.2 俯瞰圖生成
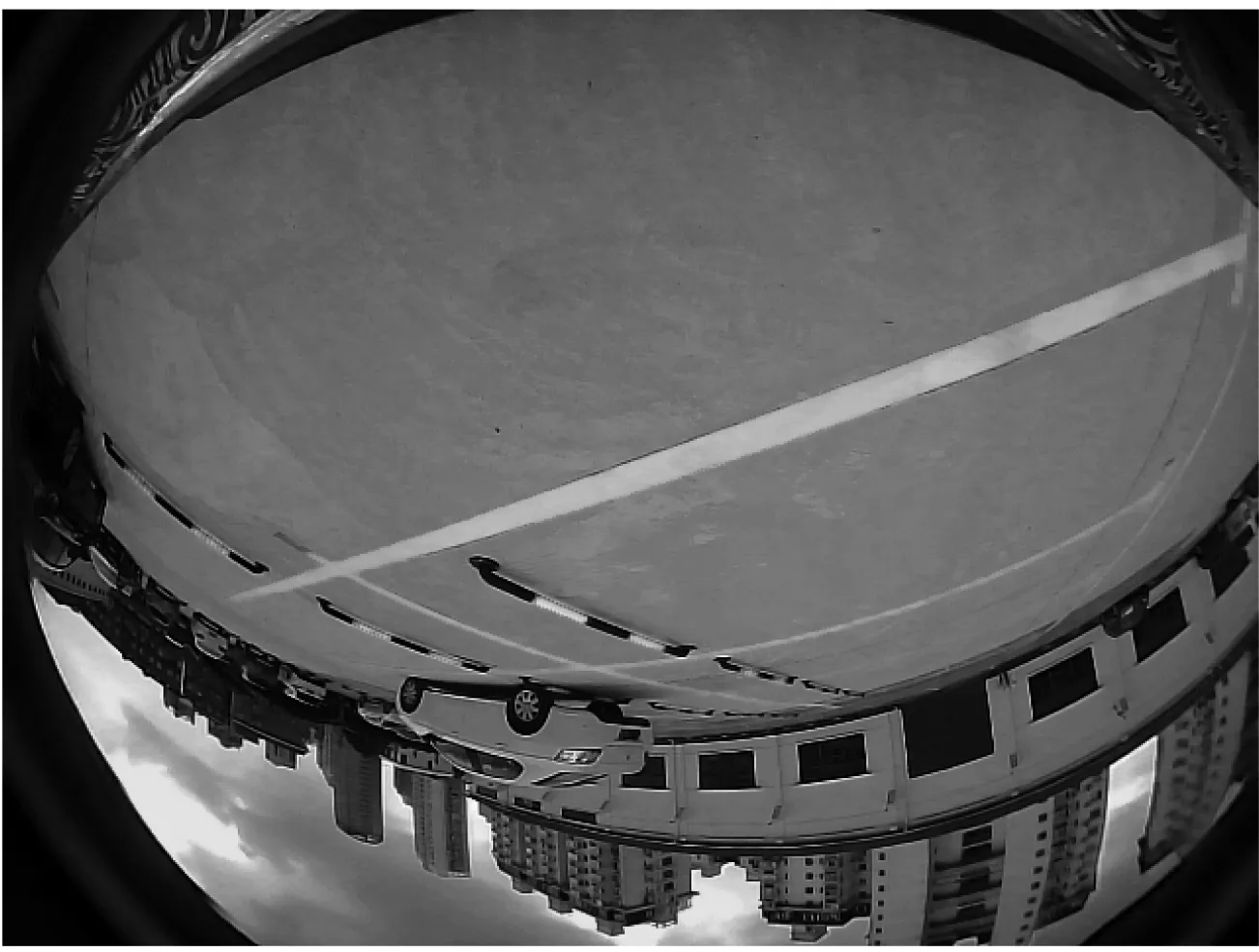
為了覆蓋盡可能多的車位線、獲取更加豐富的環境信息,采用了魚眼廣角攝像頭,但是帶來了圖像畸變,使得圖像中的對象喪失其固有的特征不利于后續的車位線識別。因此,需要對攝像頭進行內參及外參標定并通過畸變校正和逆投影變換將原始圖像轉化為相應的俯瞰圖。本文采用張正友標定法[9]對攝像頭進行內、外參標定并利用得到的參數生成從畸變圖像到俯瞰圖的map圖用于實時的圖像轉化。如圖5所示,經過畸變矯正及逆投影變換后得到的俯瞰圖中的車位線特征更加容易檢測,更好地反映了車位線為固定寬度的直線,車位線夾角為90°,60°,120°等特征。
3.2 直線對及交點提取
車位線一般由固定寬度的直線段組成,而固定寬度的直線對在Hough空間中是具有相同角度距離值固定的亮點對,如圖6所示,圖(a)中直線對L1和L2對應圖(b)中的亮點對P1和P2。因此,原始圖像中的直線對提取可以轉化為Hough空間中的亮點對提取[10,11]。
為了提取Hough空間中的亮點對,本文設計了如圖7及式所示一維濾波器遍歷Hough空間中的各點,其中的W代表車位線寬度,一般取為15 cm。
(2)
式中,PH,PL分別為上、下亮點鄰域的Hough變換最大值,以便提高算法的魯棒性。HS(θ,ρ),HS(θ,ρ-W),HS(θ,ρ+W)分別為亮點對中心、亮點中心上W和亮點中心下W處的Hough變換值。

(a) 垂直車位原始圖像
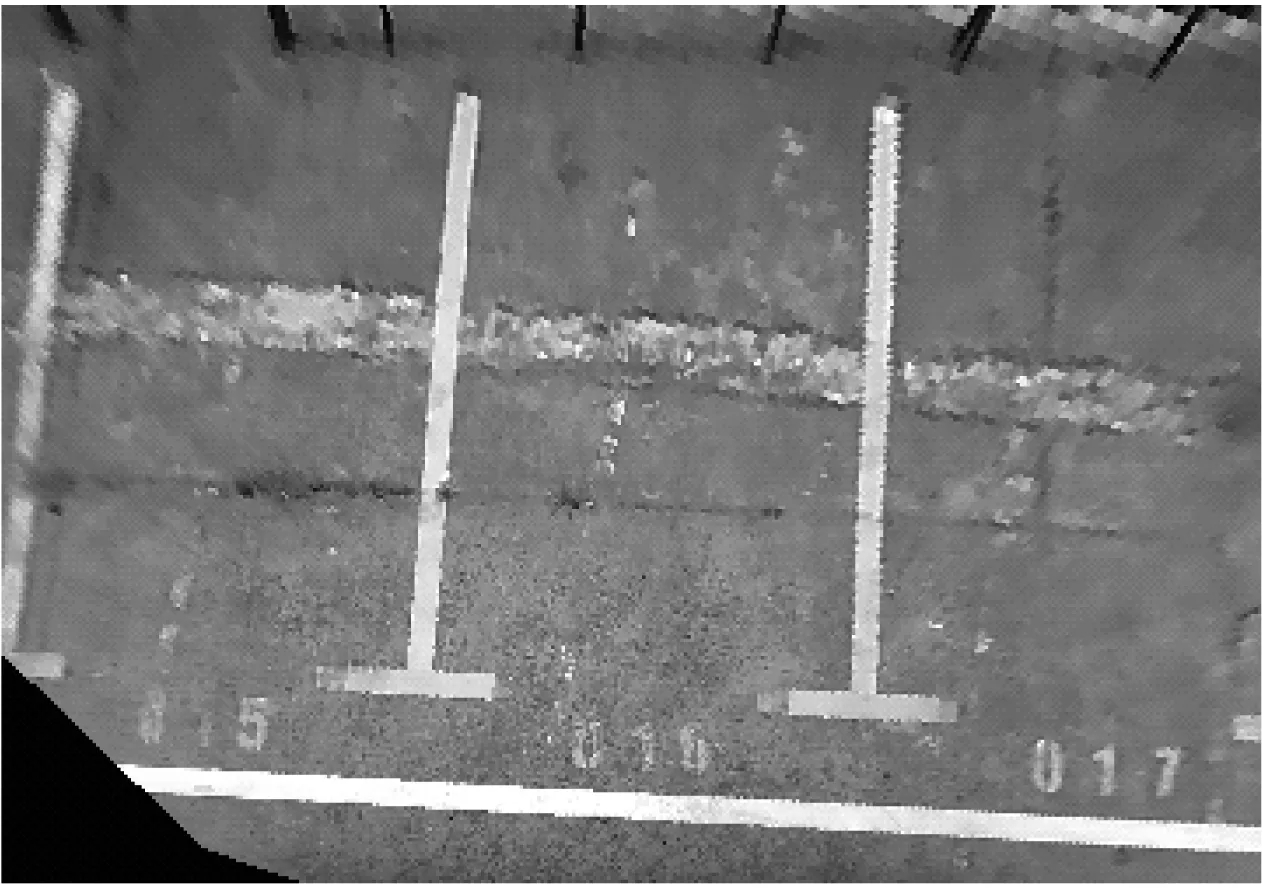
(b) 垂直車位俯瞰圖

(c) 斜向車位原始圖像

(d) 斜向車位俯瞰圖
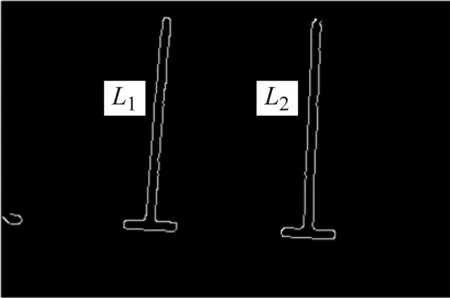
(a) 俯瞰后的二值圖
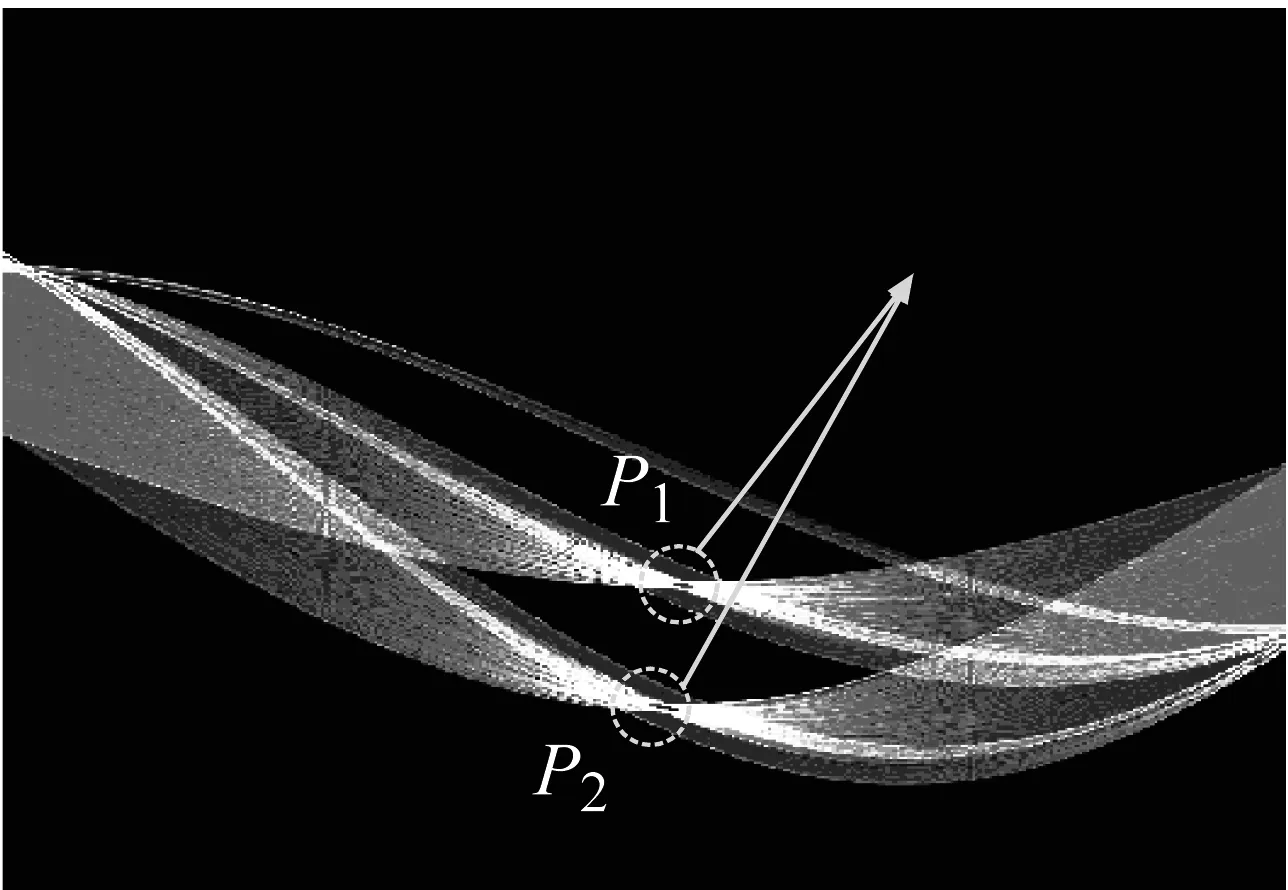
(b) Hough空間值
為了避免由于Hough變換值的不同,導致S(θ,ρ)基準值的變化。將其作歸一化處理:
(3)
式中,L(θ,ρ)為亮點中心概率密度,越大的值代表該候選點是泊車位線的可能性越大。
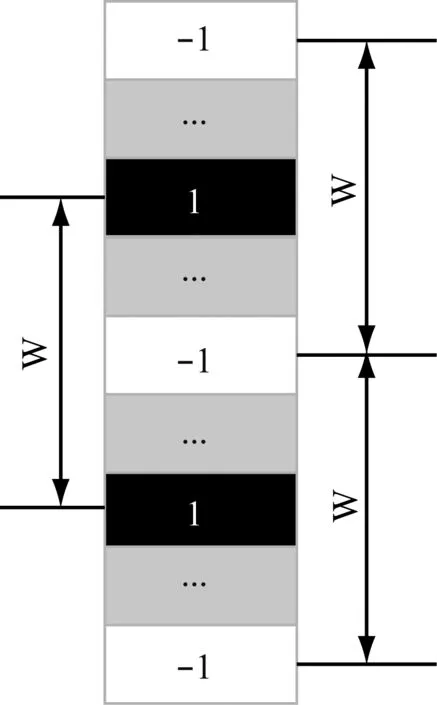
圖7 一維亮點對提取濾波器
對計算出來的亮點中心概率密度,設定閾值:當L(θ,ρ)大于該閾值時便認為是候選泊車位線,如式(4)所示。此外,為了消除光線、噪聲等因素的干擾,對檢測出來的候選亮點對需進一步的聚類處理,具體為判斷Hough空間里的候選點間的距離。
(4)
式中,C(θ,ρ)為該亮點對是否為候補泊車位線標志,L0為設定的判斷閾值。
確定候選亮點中心的(θ,ρ)后,可通過式確定候選的車位線交點。
(5)
式中,(θ1,ρ1)和(θ2,ρ2)為兩個候選中心點,x,y為交點坐標。
3.3 車位線角點提取
雖然直線對檢測可以提取出大部分的車位線,但是由于車輛泊車環境較為復雜,存在光線變化、鄰車干擾、非停車位線等影響,往往會給車位檢測帶來干擾,出現如圖8所示的誤檢測。為了消除這些干擾,需要對提取出來的車位交點作進一步篩選以獲得真實有效的車位角點。一般平行及垂直車位的角點鄰域是如圖9所示的“T”字型或“L”字型特征區域,可通過對該區域特征的識別進行車位線角點的進一步篩選。
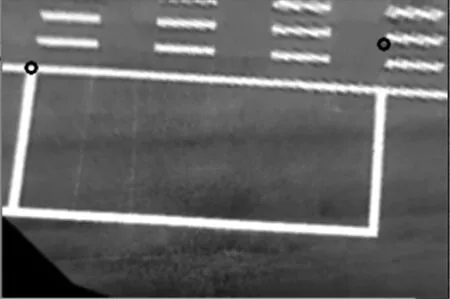
(a) 誤檢測1
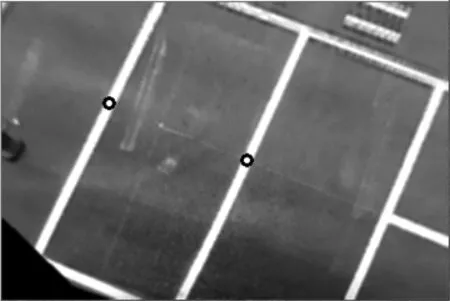
(b) 誤檢測2
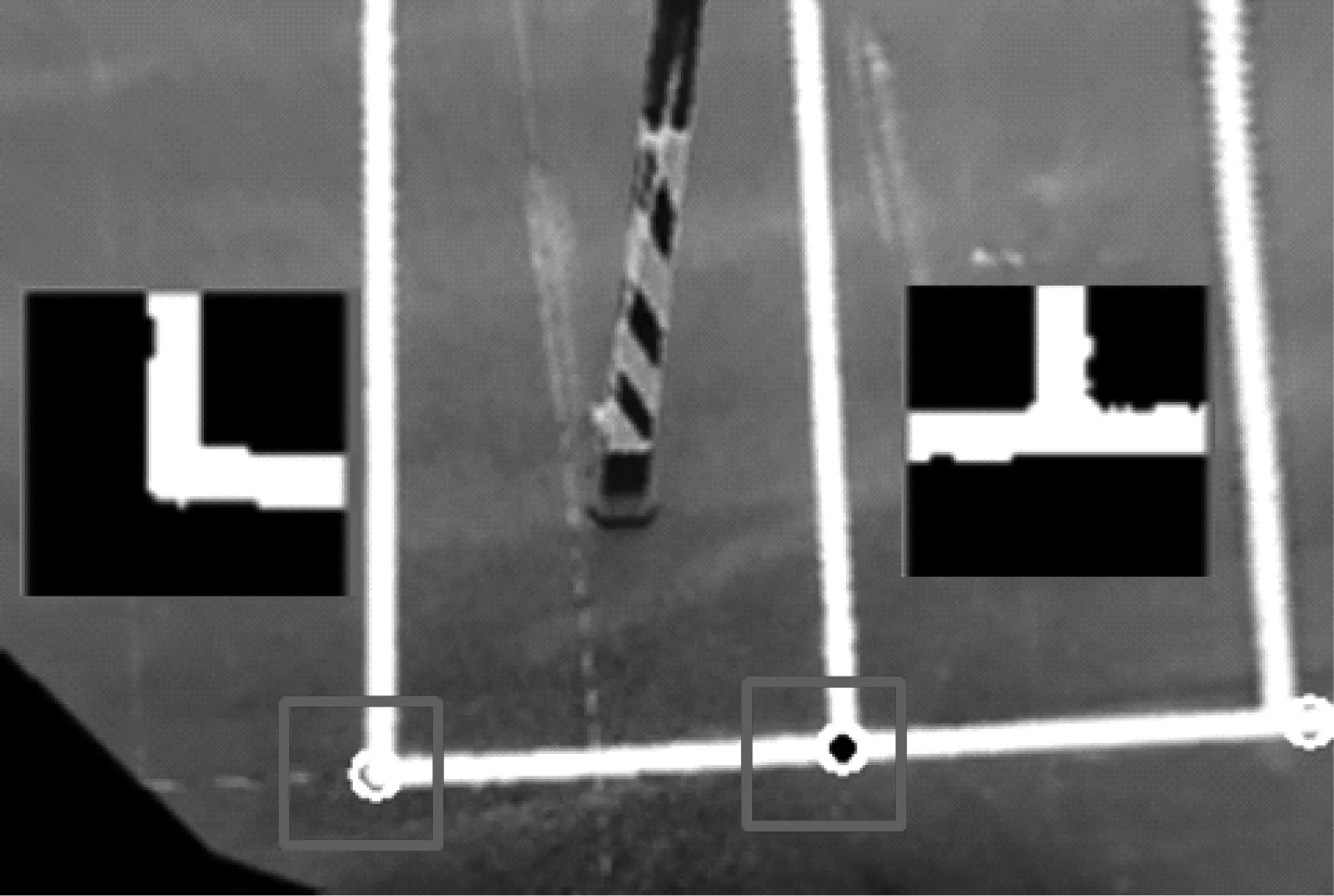
圖9 實際車位線角點特征
對候補車位角點鄰域通過Sobel算子分別取水平和垂直梯度值,并分別統計該鄰域內的水平及垂直梯度總值。當該區域內的水平及垂直梯度均大于相應的閾值后,便認為候選角點為真實的車位角點,否則為誤檢測點,如圖10和圖11所示。
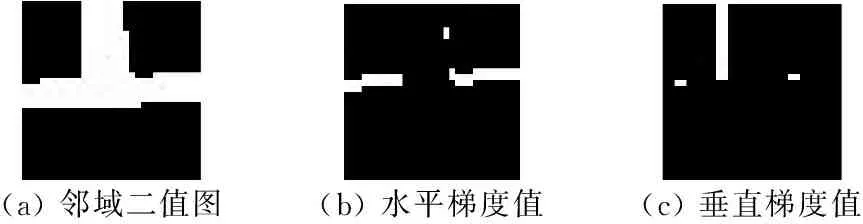
(a) 鄰域二值圖(b) 水平梯度值(c) 垂直梯度值
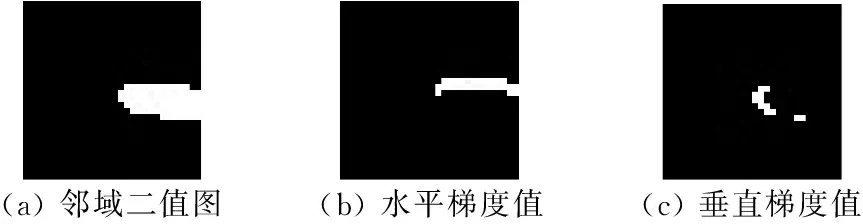
圖10 真實車位線角點
圖11 誤檢測車位線角點
Fig.11 False detection of parking line corner points
3.4 后攝像頭修正
目前常用的基于攝像頭的車位檢測是根據側向攝像頭拍攝的畫面進行車位檢測,車輛距離車位線較遠且多是在車輛以較高車速向前行駛時段,因此會帶來一定的延遲。為了對減少標定、延遲等帶來的誤差,本文中對側向攝像頭得到的車位在車輛泊車過程中通過后攝像頭對車位線坐標進行修正。此時后攝像頭距離車位線較近且車速較低,檢測得到的車位線坐標精度更高。
4 系統功能實車測試驗證
試驗平臺如圖12所示,包括4個魚眼攝像頭、輪速傳感器、電動助力轉向系統(EPS車輛自身配備)。
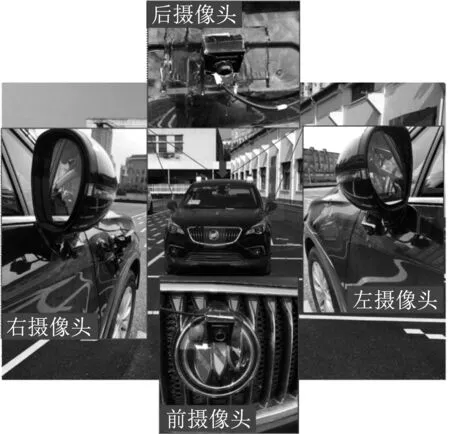
圖12 試驗平臺
基于該試驗平臺,在不同車速和側向距離下,對基于多視覺傳感器的泊車輔助系統進行了水平和垂直泊車測試,如圖13和圖14所示。
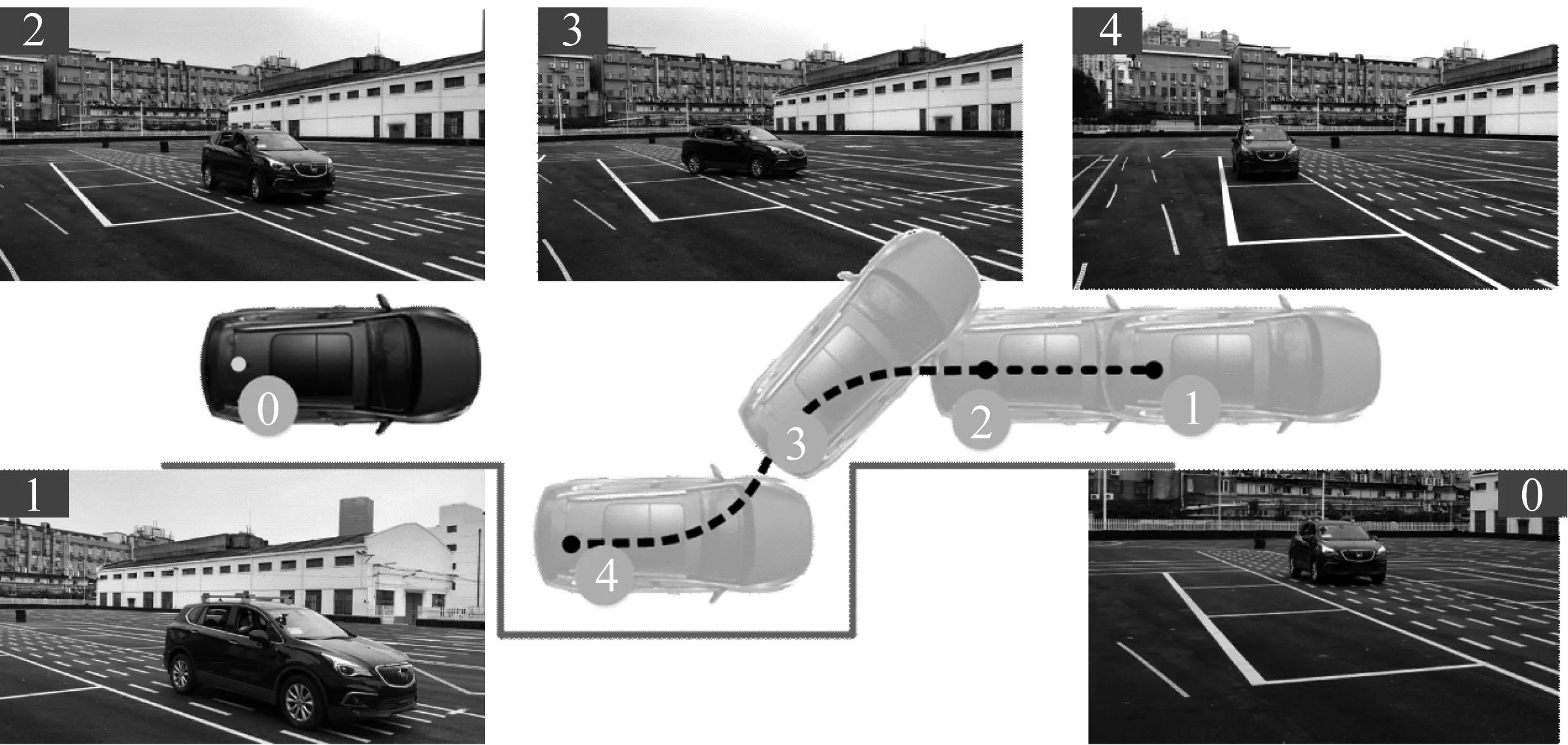
圖13 基于攝像頭的水平泊車
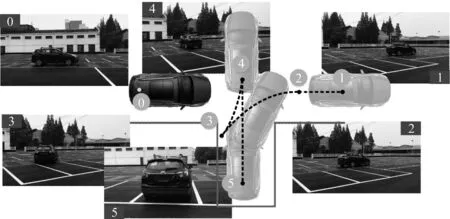
圖14 基于攝像頭的垂直泊車
相同的測試環境下,后攝像頭修正前后的泊車誤差統計如表1所示,從統計結果中可以看出修正后的泊車效果均方根誤差更小、穩定性更好。
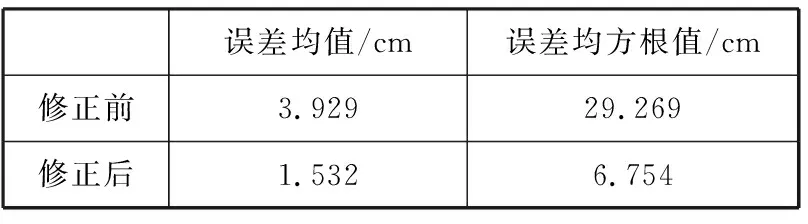
表1 后攝像頭修正前后泊車誤差
5 結語
本文設計出一種基于多視覺傳感器的泊車輔助系統,并針對車位檢測與識別過程進行了詳細的研究,對相關技術進行了深入的分析和算法設計,提出一種泊車過程中利用車輛后攝像頭修正車位檢測精度的方法。
根據設計的泊車輔助系統架構,本文基于某型SUV車輛進行了實車改裝和傳感器的安裝與標定。通過水平泊車和垂直泊車,對基于多視覺傳感器的泊車輔助系統進行了功能驗證。在停車試驗場地中,該系統能夠對車位進行精確的檢測與識別,通過中央控制器對駕駛員進行選換檔及制動等提醒,對車輛轉向系統進行自動控制,最終實現高精度的泊車過程,使車輛能夠準確地到達泊車位中心位置。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34