液體火箭發動機三軸向虛擬振動試驗技術研究
2019-01-18 10:47:26曹亞文鄧長華穆朋剛霍世慧李斌潮
火箭推進 2018年6期
韓 帥,曹亞文,鄧長華,穆朋剛,霍世慧,李斌潮,薛 杰
(西安航天動力研究所,陜西 西安710100)
0 引言
振動試驗是液體火箭發動機結構可靠性評估和力學環境適應性驗證的重要內容[1-3]。通常情況下采用單軸振動臺依次進行結構三個互相垂直方向的試驗來模擬產品所處的實際振動環境,但有時單軸振動試驗無法激發出結構的真實故障模式。相比于單軸振動試驗,三軸向振動試驗能夠更加真實地模擬產品的實際受力狀態。目前三軸向振動臺越來越多的被應用于模擬結構實際所處的振動環境研究中,但單軸振動試驗與三軸向振動試驗之間有著怎樣的區別與聯系,以及如何對單軸向振動試驗的輸入譜進行修改以應用于三軸向振動試驗等問題目前還沒有成熟的方法。基于此,開展三軸向虛擬振動試驗研究,對于分析結構在單軸向和三軸向振動試驗中的動態響應區別,以及研究修改單軸向振動試驗輸入譜以適用于三軸向振動試驗都具有重要的研究價值。
關于虛擬振動臺試驗技術的研究目前主要有兩種途徑:一種是采用振動臺機電耦合模型與振動臺多剛體動力學模型相結合的方法構建振動臺計算模型;另一種是對振動臺直接進行有限元建模,通過與產品進行聯合仿真建模的方式進行虛擬振動試驗。本文采用有限元方法構建了三軸向振動臺動力學仿真模型,開展了三軸向振動臺虛擬振動試驗系統設計和控制方法的研究工作。對某試件分別進行了x,y,z軸向一維虛擬振動試驗以及三維虛擬振動試驗,并對一維和三維虛擬正弦振動試驗結果和虛擬隨機振動試驗結果進行了對比分析。
1 電動振動臺工作原理
電動振動臺工作原理是基于載流導體在磁場中受到電磁力作用的安培定律[4-5]。電動振動臺臺體內有兩組勵磁線圈,一組在中間板上側,一組在中間板下側。當直流電流通過勵磁線圈,會在勵磁線圈周圍產生磁通。上下勵磁線圈的磁通在動圈處形成一個高磁感應強度的環形氣隙,當經過功率放大器放大的交變電流信號通過動子線圈時,根據安培定律,會在勵磁磁場的作用下產生交變力F,使動圈沿圖示運動方向上下運動。設電流簡諧變化,i=Isinωt,則力F=Bli=BlIsinωt,其中B為勵磁磁場的磁感應強度;l為動子線圈繞線的有效長度;I為動圈中的電流。
2 三軸向電動振動臺建模技術
三軸向虛擬振動建模技術包括三軸向電動振動臺有限元建模和三軸向虛擬正弦、隨機振動控制方法研究[6-9]。
2.1 三軸向電動振動臺有限元建模
以某10T三軸向電動振動臺為研究對象進行建模。振動臺幾何模型直接采用CAD軟件進行建立。在UG中建立三軸向電動振動臺各部件(臺體、靜圈、動圈、牛頭、平動式靜壓導軌連接器、中心懸浮體及擴展臺面等)幾何模型[10-12]如圖1所示。
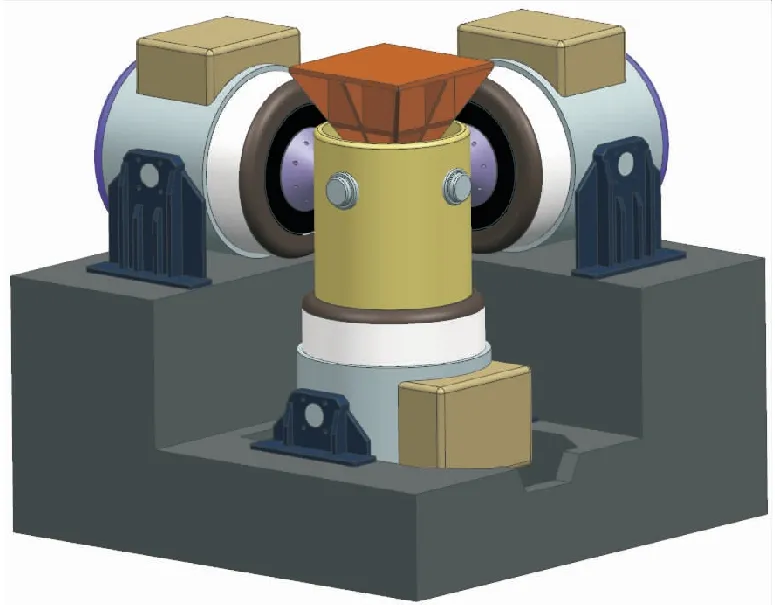
圖1 三軸向振動臺幾何模型Fig.1 Geometrical model of three-axial vibration test bench
將三軸向振動臺各個部件的CAD模型導入MSC.Patran軟件環境下建立相應部件的幾何模型及有限元模型。其中,可動部分包括動圈、牛頭、平動式靜壓導軌連接器、中心懸浮體以及擴展臺面。對可動部分進行四面體網格劃分,其余結構視為剛體。
振動臺運動部件之間的螺釘連接可以用約束六自由度的MPC單元等效成接觸面之間的剛性連接。三軸向振動臺通過平動式靜壓導軌連接器進行各個激勵方向上的空間解耦,平動式靜壓導軌連接器與中心懸浮體之間的連接可以使用動圈軸向單自由度MPC單元進行接觸區域之間的連接。振動臺仿真模型共包含40 856個四面體十節點單元和1 331個MPC單元。有限元模型如圖2所示。
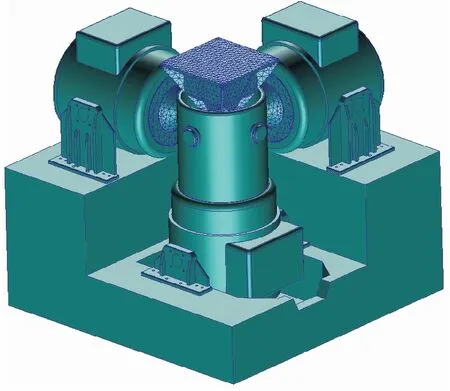
圖2 三軸向電動振動臺有限元模型Fig.2 Finite element model of three-axial electric shaker
將動圈四周的4個U型彈簧當做可動部分處理。在建立振動臺動圈時,直接將U型彈簧與動圈建立為統一的整體,進行統一的網格劃分,在定義材料屬性時對U型彈簧和動圈分別進行材料屬性定義。同時對U型彈簧外側面進行固支處理。
在MPC單元的單個節點上施加軸向力而使得整個動圈產生均勻的軸向力,模擬動圈的實際受力狀態。
2.2 振動控制方法
2.2.1 頻響分析
頻響分析的目的是獲得振動臺系統監測點與激勵點之間的頻響函數矩陣。為了獲得三軸向振動臺三個動圈底部激勵點和控制點之間的總頻響函數矩陣,在三個動圈底部分別施加動圈軸向單位力進行正弦掃頻,根據方程x(iω)=H(iω)f(iω)得到控制點與每個激勵點之間的頻響曲線。
考慮到三個方向的正交性,可以獲得三軸向電動振動臺仿真模型三個動圈激勵點與擴展臺面上控制點之間的總體頻響函數矩陣為:
(1)
式中:加號前邊的H為傳遞函數實部;加號后邊的H為傳遞函數虛部。
2.2.2 正弦振動控制
(2)

(3)
(4)
在正弦載荷激勵下,三軸向電動振動臺仿真系統的正弦控制響應計算過程如圖3所示。
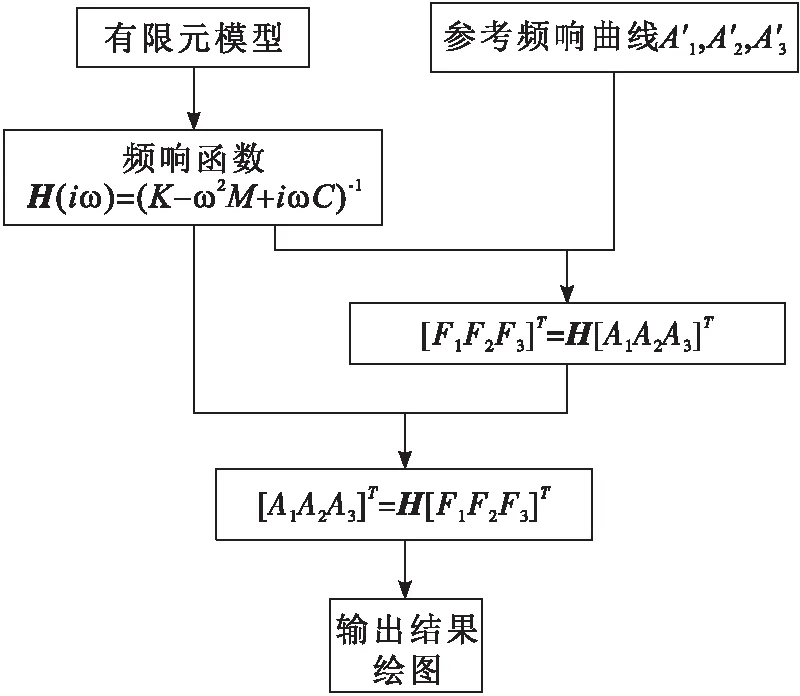
圖3 正弦響應計算原理框圖Fig.3 Block diagram for calculation principle of sine response
2.2.3 隨機振動控制
在對三軸向振動試驗系統進行隨機振動控制之前,首先需要確定控制點處的功率譜密度曲線。由于本振動試驗系統為三維輸入,不僅要考慮每個激勵點處的自功率譜密度,還要考慮激勵點與激勵點之間的互功率譜密度。同時需要兼顧所關注頻段內的均方根值。均方根值是表征能量的一個參數。如果此值過大,容易引起振動臺上的產品由于能量過大而損壞[13-15]。
在確定激勵點之間的互功率譜密度Sxy(ω),Syz(ω),Szx(ω)時需要設定激勵點之間的相干系數。兩個平穩隨機過程x(t),y(t)之間的相干函數定義為:
(5)
式中:|γxy|=1時,x(t)與y(t)之間存在線性關系,且系統必為線性系統;
|γxy|<1時,值越接近于1說明x(t)與y(t)之間存在線性關系的可能性越大;
|γxy|=0時,表示x(t)與y(t)之間完全不相干,二者相互獨立。此方程所描述的是兩個信號在各個頻率處的相關程度。
(6)
其中
得到振動臺動圈激勵點力輸入譜SF后,可以通過在Patran中進行隨機振動計算來獲取所關注位置處的功率譜密度曲線以及查看相關的應力分布情況,同時也可以輸出控制點位置的功率自譜密度曲線。如果輸出的控制點位置的功率譜密度曲線與參考譜相同,說明隨機振動控制計算原理正確。
在隨機載荷激勵下,三軸向電動振動臺仿真系統的隨機控制響應計算過程如圖4所示。
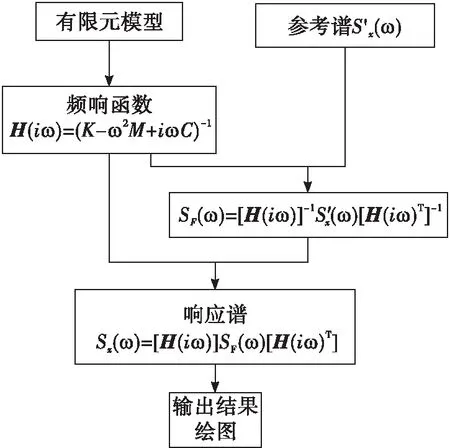
圖4 隨機響應計算原理框圖Fig.4 Block diagram for calculation principle of random response
3 三軸向虛擬振動試驗算例
3.1 試驗件模型
試驗件由框架、噴管、氧化劑導管和燃料導管等組成。加速度測點分別安裝在試件的噴管低端位置和氧化劑導管中部位置。應變片貼在氧化劑導管根部。試驗件框架四周的螺栓孔位置附近為固定位移約束。
3.2 三軸向虛擬正弦振動試驗
三軸向虛擬正弦振動試驗范圍為20~2 000 Hz。試驗加速度控制點定義為與試驗件框架連接的試驗夾具上某一點。設定結構臨界阻尼系數為0.02。控制點在三個動圈激勵方向上的加速度曲線均設定為如圖5所示曲線。使用相同的方法對三個動圈下方MPC點分別施加正弦激勵來分別進行單軸正弦激勵。相關參數設置及監測點加速度幅值曲線均與三軸向正弦振動仿真相同。
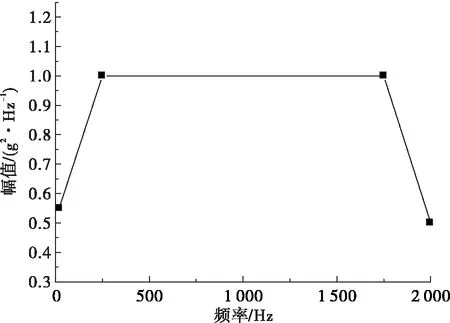
圖5 控制點加速度曲線Fig.5 Acceleration curve of reference control point
將試驗件與三軸向虛擬振動試驗系統進行聯合仿真,并將虛擬正弦振動試驗條件施加給虛擬振動試驗系統進行虛擬振動試驗。圖6為可視化的試驗件與三軸向虛擬振動臺聯合的虛擬振動試驗系統。
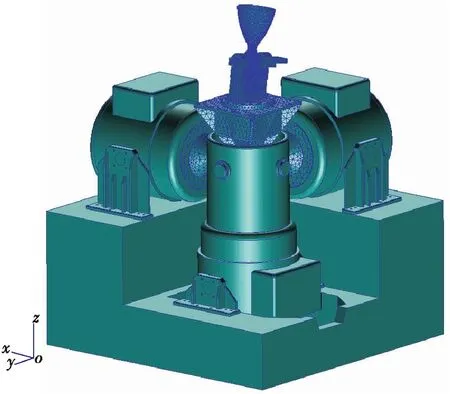
圖6 試驗件與三軸向振動臺有限元模型Fig.6 Finite element model of specimen and three-axial shaker
提取單軸向正弦激勵與三軸向正弦激勵條件下產品上關注點的加速度幅值曲線,以觀測研究頻段內關注點加速度的整體分布情況和對應頻率下的最大幅值。圖7給出的是產品某一關注點處在三軸向同時激勵下和單軸向分別激勵下的加速度響應曲線。由圖7可知,三軸向同時激勵下,監測點加速度最大響應都是在低頻段。與3個方向分別進行單軸激勵相比,單軸激勵下的各個峰值在三軸向同時激勵時均體現了出來。三軸向同時激勵下各個峰值的加速度幅值均有一定程度提高,并且激發出了更多的加速度峰值。
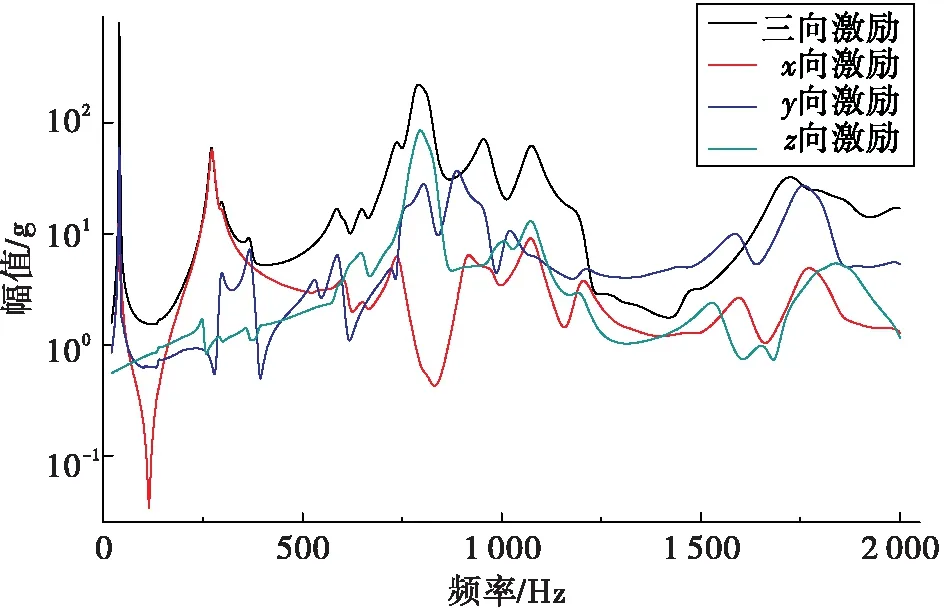
圖7 氧化劑導管中部加速度幅值曲線Fig.7 Acceleration amplitude curves in middle of the oxidant tube
3.3 三軸向虛擬隨機振動試驗
虛擬隨機振動試驗范圍為900~1 000 Hz。結構臨界阻尼系數設為0.02,3個激勵點之間的相干系數設定為1.0,即各個激勵點之間完全相干。試驗條件如表1所示。選取產品與夾具連接面上一點為控制點。

表1 窄帶隨機振動激勵條件
圖8為游機機組氧化劑導管在x,y,z三個正交方向分別激勵下的應力Mesis云圖以及游機機組氧化劑導管在三軸向同時激勵下的應力Mesis云圖。
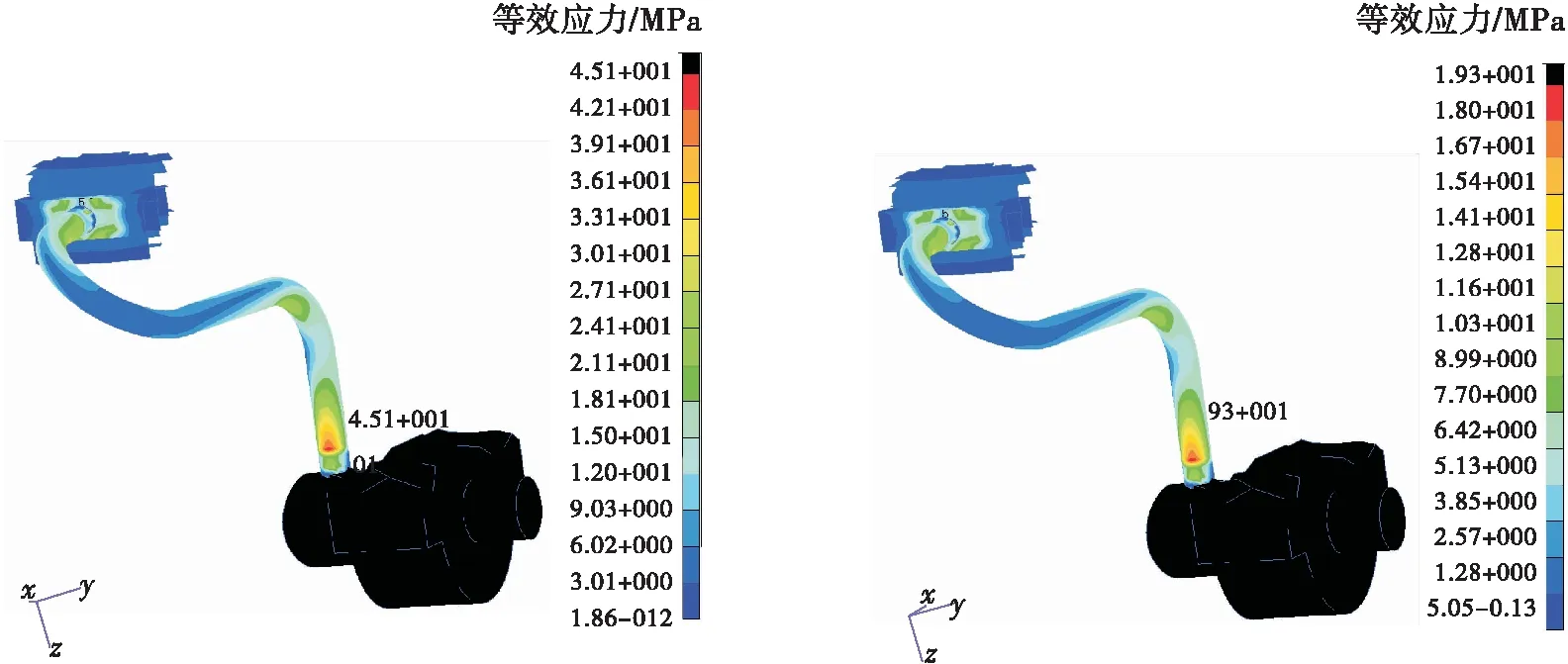
(a)x向激勵下應力Mises云圖 (b)y向激勵下應力Mises云圖
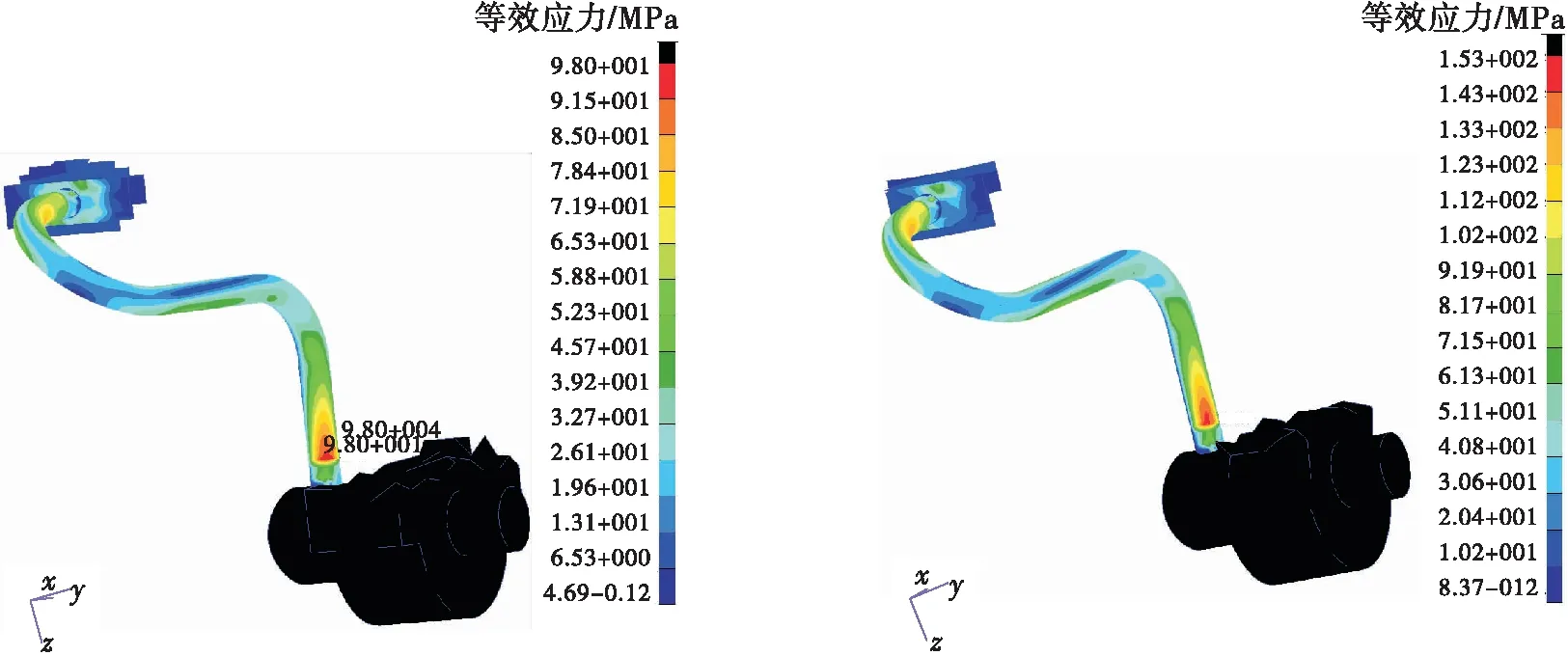
(c)z向激勵下應力Mises云圖 (d)三軸向激勵下應力Mises云圖
圖8應力Mises云圖
Fig.8Misesnephogramofstress
從圖8中可以看出,無論是x,y,z單向激勵或三軸向同時激勵,產品氧化劑導管的最大應力所在區域都是氧化劑導管與搖擺軸連接位置附近。對氧化劑導管與搖擺軸連接處附近某一單元進行應力值提取,并與相同位置的試驗結果進行對比,結果如表2所示。
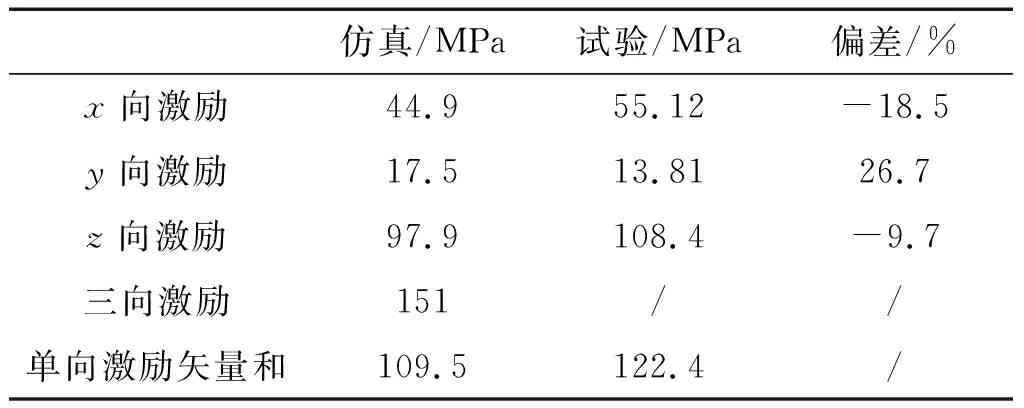
表2 仿真結果與試驗結果應力值對比
從對比結果可以看出,單軸向激勵時仿真結果與試驗結果的偏差在允許范圍內。同時在三軸向激勵下,獲得的該監測點的應力值為151 MPa。對比發現,三軸向激勵下該單元位置的應力值較單向激勵時都較大。計算仿真試驗中單向激勵下該點在三個方向上的應力的矢量和為109.5 MPa。對比此結果與三軸向激勵下的結果可以發現二者相差較大。因此得出,三軸向激勵并不能用單軸向激勵的空間矢量疊加來等效,必須考慮三軸向激勵下的空間耦合作用。
4 結論
本文采用理論分析、數值仿真與試驗相結合的研究手段,開展了液體火箭發動機三軸向虛擬振動試驗研究。將某試驗件與三軸向振動臺進行聯合建模,通過相關控制方法進行了試件的三軸向虛擬正弦振動試驗和虛擬隨機振動試驗,可以得到以下結論:
1)通過相關公式推導及計算獲得了三軸向正弦振動和隨機振動的控制方法,相關方法獲得的控制譜與參考譜完全相符。
2)三軸向虛擬正弦振動試驗與單軸激勵相比在所研究的頻率范圍內多出了部分共振峰,分析認為某些峰值是由三軸向同時激勵的耦合作用所產生。
3)從虛擬隨機振動試驗應力Mises云圖可以看出,游機機組氧化劑導管與搖擺軸連接部位的應力值最大,最容易發生故障。相比單軸向激勵,三軸向同時激勵時應力值大,且三軸向激勵的結果并不等效于單軸激勵時簡單的矢量疊加,必須考慮三個方向同時激勵的耦合作用。因此在實際的三軸向振動試驗中,如果仍采用單軸的試驗參考譜同時施加在三個方向,可能會導致單向激勵通過的試驗三軸向無法通過,需要根據虛擬試驗的結果指導實際參考譜的剪裁和修正。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03