基于趨勢補(bǔ)償?shù)姆辣老到y(tǒng)輪速信號處理*
2019-01-16 01:01:10鄒浙湘黃寶山
沈陽工業(yè)大學(xué)學(xué)報(bào) 2019年1期
鄒浙湘,王 倩,黃寶山
(北京理工大學(xué)珠海學(xué)院 工業(yè)自動化學(xué)院,廣東 珠海 519085)
混合動力汽車是目前汽車發(fā)展的新趨勢,其具有綠色環(huán)保、節(jié)能高效等諸多優(yōu)點(diǎn)[1-3].然而,多個(gè)能源提供動力也帶來了汽車電氣控制、發(fā)動機(jī)協(xié)調(diào)控制復(fù)雜,故障率增加等問題.尤其是混合動力公交等交通工具,因啟動和停止的次數(shù)頻繁,對汽車防抱死系統(tǒng)(anti-lock braking system,ABS)的制動精度及準(zhǔn)確度也提出了更高的要求[4-5].因此,有效提高ABS系統(tǒng)的信號檢測水平,減小或者抑制ABS的控制誤差,成為了汽車控制領(lǐng)域的新研究熱點(diǎn)[6].
現(xiàn)有的ABS系統(tǒng)一般均是通過對輪速信號的獲取和處理來得到反饋控制信號[7].常見的用于拾取輪速信號的傳感器主要包括電渦流感測型、磁電型、光電型以及霍爾型等.其中,電渦流及磁電型傳感器在檢測精度上相對粗糙,檢測信號存在遲滯或者延后的特點(diǎn);光電型傳感器在檢測靈敏度方面雖然最高,卻對使用環(huán)境的要求比較嚴(yán)格,污垢以及外界光強(qiáng)均會對檢測精度產(chǎn)生影響因素,其在車輛運(yùn)行的復(fù)雜環(huán)境下干擾因素過多;霍爾傳感器[8]作為一種高靈敏、高精度的輪速傳感器,相對于磁電類的傳感器具有更突出的檢測性能,同時(shí)對于外界環(huán)境影響又相對魯棒,是一種更加適用于混合動力汽車應(yīng)用的輪速檢測傳感器.
霍爾傳感器在使用過程中,會因環(huán)境溫度變化引起檢測信號出現(xiàn)溫度漂移[9-10],具體體現(xiàn)在輪速檢測信號為一個(gè)低頻的趨勢波動信號[11].本文針對混合動力汽車的ABS霍爾傳感器進(jìn)行溫度趨勢估計(jì)和補(bǔ)償,通過對霍爾傳感器實(shí)時(shí)檢測得到的輪速信號進(jìn)行濾波,提取出聯(lián)合中值均值加權(quán)[7](MEM)和經(jīng)驗(yàn)?zāi):瘮?shù)分解[12](EMD)表征溫度漂移部分的趨勢信號,并從輪速信號[13]中進(jìn)行消除,從而實(shí)現(xiàn)高精度汽車制動控制,減少發(fā)動機(jī)運(yùn)行故障,提高車輛運(yùn)載效能[14].
1 混合動力系統(tǒng)結(jié)構(gòu)
圖1為本文采用的混合動力汽車系統(tǒng)結(jié)構(gòu)框圖,其展示了混合動力汽車內(nèi)部主要原件之間的協(xié)調(diào)配合工作方式.主體可以分為4個(gè)不同部分:燃料儲液總成、蓄能儲能模塊、氣體冷卻模塊和輪速調(diào)控模塊.燃料儲液總成主要由蓄液池與其關(guān)聯(lián)的壓力控制結(jié)構(gòu)組成,微米通氣閥調(diào)節(jié)進(jìn)入蓄液池平衡氣體的數(shù)量,蓄液池泄壓閥門起到對應(yīng)的拮抗調(diào)節(jié)功能,液溫及液位傳感器檢測蓄液池內(nèi)可用燃料的狀態(tài)是否能夠支持汽車運(yùn)行;蓄能儲能模塊直接連接燃料儲液模塊,具體由隔離閥以及過濾器調(diào)節(jié)與高壓蓄能器之間的動態(tài)轉(zhuǎn)化過程;氣體冷卻模塊主要調(diào)節(jié)燃料通氣燃燒以及內(nèi)燃冷卻過程,其主要通過聯(lián)通閥和旁通閥組合調(diào)節(jié)進(jìn)入蓄液池內(nèi)的空氣總量.空檔壓力傳感器檢測空檔行為,冷卻器起到對內(nèi)燃系統(tǒng)控制和穩(wěn)定溫度的轉(zhuǎn)化功能.輪速調(diào)控模塊對應(yīng)圖1中間虛框,包括ABS、連接泵、變速傳感器、泵速傳感器和氣泵,其附加霍爾傳感器進(jìn)行輪速檢測,檢測得到的輪速信號再進(jìn)行濾波和趨勢估計(jì).
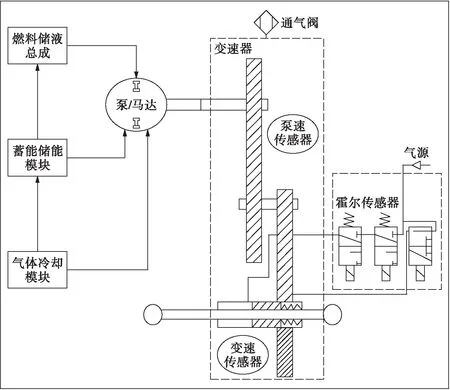
圖1 混合動力系統(tǒng)結(jié)構(gòu)圖Fig.1 Hybrid power system structure chart
2 溫度漂移趨勢估計(jì)算法
輪速信號的常見誤差主要來自傳感單元的熱噪聲以及干擾產(chǎn)生的尖峰或毛刺信號.在利用霍爾傳感器進(jìn)行檢測時(shí),需要進(jìn)一步考慮溫度漂移帶來的趨勢項(xiàng)干擾和補(bǔ)償問題.外界干擾及熱噪聲一般屬于高頻噪聲,可以通過低通濾波器進(jìn)行消除;然而溫度漂移引起的趨勢項(xiàng)卻屬于低頻噪聲.由于溫漂干擾項(xiàng)的不確定性,傳統(tǒng)高通濾波器難以滿足既能有效濾除溫漂干擾又可避免對輪速信號造成干擾的要求,本文通過聯(lián)合中值均值加權(quán)(MEM)和經(jīng)驗(yàn)?zāi):瘮?shù)分解(EMD)來濾除溫漂干擾并使輪速信息無損,算法具體步驟如下:
1) 以信號的首尾對原信號進(jìn)行延拓處理,假設(shè)需要濾波的輪速信號X(t)的長度為L,其首值以及尾值分別為X(0)、X(L-1),設(shè)定該滑窗的長度為W,則延拓方程可表示為
(1)
2) 利用Xext(t)對每個(gè)窗內(nèi)的向量進(jìn)行中值和均值加權(quán)估計(jì).估計(jì)值可近似理解為中值與均值的一個(gè)凸組合,即

(2)

(3)
式中,
(4)
通常k的取值范圍為[1.14,1.95],本文算法中取k值為1.5.每次數(shù)值求解的迭代次數(shù)至少為30次,這樣才能保證最終的解收斂到可以承受的求解精度內(nèi),本例算法的迭代次數(shù)n為50.
3) 將所有估計(jì)值組成一個(gè)新的變量We作為溫漂干擾的一個(gè)初步估計(jì),并對其進(jìn)行EMD分解,得到一系列固態(tài)模函數(shù)(IMF).當(dāng)滑窗滑過整個(gè)數(shù)據(jù)信號后得到對應(yīng)數(shù)量的估計(jì)值組合在一起即為對原信號中溫漂干擾的估計(jì)值We.需要補(bǔ)充說明的是:每個(gè)估計(jì)值相對精確值是有誤差的,這個(gè)誤差反映了MEM方法的固有缺陷,其有一定的統(tǒng)計(jì)規(guī)律,且服從一個(gè)0均值的漸近正態(tài)分布,即
(5)
(6)
式中:θn為迭代n次之后得到的數(shù)值解;θ為精確解;ψ(x)為積分核函數(shù),是一個(gè)高階多項(xiàng)式核函數(shù);F(x)為積分的核函數(shù)分布函數(shù).
為了進(jìn)一步修正這部分誤差,對濾出的We進(jìn)行了EMD分解.具體步驟如下:
① 確定We的所有局部極大值點(diǎn)和局部極小值點(diǎn).
② 通過3次樣條插值分別擬合局部極大值點(diǎn)和局部極小值點(diǎn),得到上下兩個(gè)包絡(luò)線.
③ 從We減去上下包絡(luò)線的均值m1,0(t),得到中間量h1,0(t)=We(t)-m1,0(t).
④ 將h1,0(t)作為一個(gè)新的We,并重復(fù)上述步驟②、③,得到h1,k(t)=h1,k-1(t)-m1,k(t),直到收斂閾值SD值介于0.2~0.3之間停止迭代.其中,SD計(jì)算表達(dá)式為
(7)
⑤ 將h1,k(t)定義為第一個(gè)IMF,即c1(t),從We中減去該IMF得到第一個(gè)殘基r1(t)=We(t)-c1(t).
⑥ 將殘基r1看成一個(gè)新的We,重復(fù)上述步驟,得到一系列c2,c3,…,cN和r2,r3,…,rN,其中,N為迭代終止次數(shù),直到最后的殘基rN是一個(gè)常量、單調(diào)直線或單極值點(diǎn)的函數(shù),通常將最后的殘基作為最后一階IMF.
4) 根據(jù)MEM的固有缺陷,采用t檢驗(yàn)對IMF進(jìn)行篩選.低階IMF分量含有較多的高頻分量和較少的低頻分量;而MEM引入的誤差分布在比溫漂干擾頻率高的頻帶,且這部分誤差在時(shí)域服從一個(gè)0均值的漸近正態(tài)分布.因此,本文算法采取從高階IMF到低階IMF進(jìn)行部分求和的t檢驗(yàn),該檢驗(yàn)是為了篩選出哪些IMF組合為MEM引入了誤差.
5) 將篩選出的IMF重構(gòu)后,從We中減去即可得到較準(zhǔn)確的溫漂干擾,再從原輪速信號中減去得到的準(zhǔn)確溫漂干擾,即可得到準(zhǔn)確的輪速信號.假設(shè)在t檢驗(yàn)過程中,發(fā)現(xiàn)第P階為MEM引入了誤差,將這部分值從We中減去,便得到了最終修正后的Wf,即
(8)
溫漂干擾本身也有可能是0均值,故在迭代t檢驗(yàn)時(shí),本文算法會在當(dāng)前階等于IMF總數(shù)一半時(shí)強(qiáng)行終止.在這種特殊情況下會引入部分誤差,但誤差不會過大,最后從原信號中減去Wf得到修正后的輪速信號.
3 實(shí)驗(yàn)結(jié)果
本文提出了一種溫度漂移趨勢修正算法,輪速信號取自實(shí)驗(yàn)采集的ABS制動時(shí)標(biāo)準(zhǔn)數(shù)據(jù)庫,其采樣率為360 Hz.將10 mV的振幅范圍進(jìn)行11位的離散化處理,振幅在0~2 047之間,其中1 024對應(yīng)0值.實(shí)驗(yàn)樣本截取3 000點(diǎn)數(shù)據(jù),相應(yīng)MEM滑動窗口長度L在120~200點(diǎn)之間.另外,為了進(jìn)一步測試算法的有效性,通過低通一個(gè)隨機(jī)序列來產(chǎn)生一系列的人工噪聲.隨機(jī)序列的振幅范圍區(qū)間為[0,C],服從均勻分布.圖2示例給出受人工噪聲(C=500)污染與修正信號的對比,可看出所提算法即使在明顯溫度漂移的情況下,仍能有效恢復(fù)原始輪速信號.圖3進(jìn)一步給出了估計(jì)得到的溫度漂移趨勢.
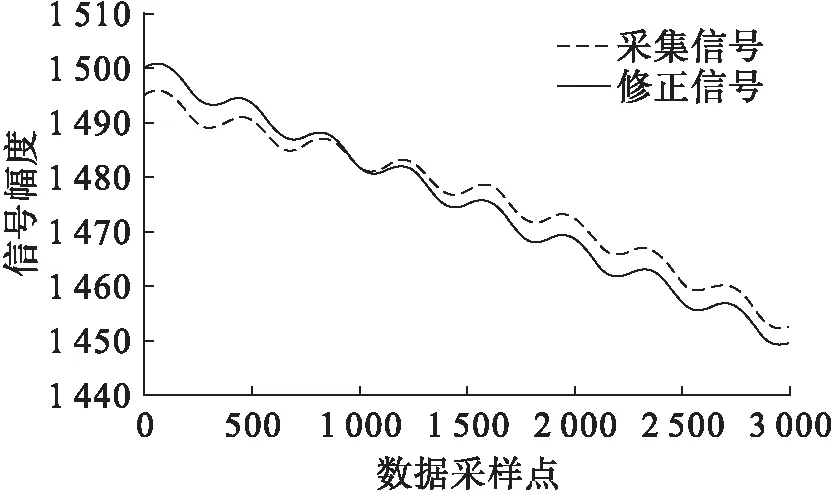
圖2 溫度漂移輪速信號對比Fig.2 Comparison in wheel speed signal with temperature drift correction
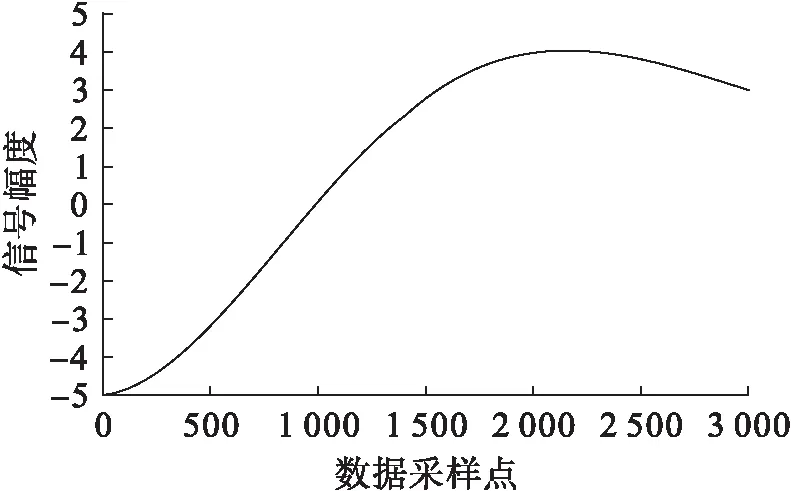
圖3 估計(jì)溫度漂移趨勢信號Fig.3 Estimated temperature drift trend signal
為了更好地量化顯示本文算法的性能,通過計(jì)算信噪比(SNR)來評價(jià)算法有效性,SNR的計(jì)算方法為SNR=20ln(Sσ/Nσ).實(shí)驗(yàn)采集ABS制動時(shí)霍爾傳感器檢測得到的標(biāo)準(zhǔn)數(shù)據(jù)庫的數(shù)據(jù),并融合給定實(shí)驗(yàn)條件下的噪聲信號.剔除噪聲的性能越好,其得到的噪聲估計(jì)信號和原始加入的噪聲越接近,實(shí)際殘存在信號中的噪聲Nσ越小,濾波信號Sσ與噪聲Nσ的信噪比越高.將本文算法和基于形態(tài)學(xué)濾波方法進(jìn)行了橫向?qū)Ρ龋?列出了在不同振幅C值下的平均SNR值.
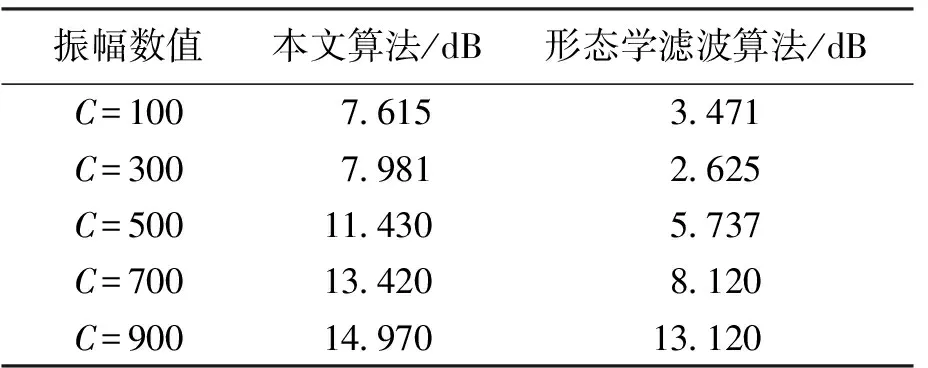
表1 本文算法與形態(tài)學(xué)濾波方法結(jié)果對比Tab.1 Comparison in results of proposed method and morphological filtering method
實(shí)驗(yàn)結(jié)果表明,本文所提算法能夠有效估計(jì)溫度漂移干擾,從而消除ABS制動系統(tǒng)的輪速監(jiān)測誤差.因?yàn)樗岢龅乃惴ò艘粋€(gè)自修正的過程,從而能更加合理、精確地選擇出溫度漂移干擾的分量,由此可提高整體的濾出效果.
4 結(jié) 論
作為一個(gè)完全非線性的濾除溫度漂移干擾方式,本文算法避免了傳統(tǒng)濾波器中由于固定截止頻率而帶來的誤差.MEM濾波器以一種非線性的方式將原始信號的低頻部分濾出,EMD方法將MEM的輸出分解成一系列IMF,在這些IMF中,t檢驗(yàn)會選出溫度漂移干擾的成分.該算法能夠有效濾除溫度漂移干擾,并能保存輪速信號的有用信息,從而實(shí)現(xiàn)高精度的汽車制動控制,減少發(fā)動機(jī)運(yùn)行故障,提高車輛運(yùn)載效能.
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25