基于多對稱虛擬變換的二維波達方向估計算法*
2019-01-15 08:15:18聶衛科徐楷杰牛進平馮大政
傳感器與微系統 2019年2期
關鍵詞:信號
聶衛科, 徐楷杰, 牛進平, 周 延, 馮大政
(1.西北大學 信息科學與技術學院,陜西 西安 710127; 2.西安電子科技大學 機電工程學院,陜西 西安 710071;3.西安電子科技大學 雷達信號處理國家重點實驗室,陜西 西安 710071)
0 引 言
傳感器陣列信號處理是雷達、聲納、移動通信等領域的關鍵技術[1~3]。高分辨二維波達方向估計利用傳感器陣列接收數據,估計目標的方位角和俯仰角,相比一維估計,可提取更多的空間信息[4],提高信號分選和目標識別概率[5]。多信號分類(multiple signal classification,MUSIC)算法[6]作為子空間類高分辨算法的經典代表,需要二維譜峰窮盡搜索和參數配對過程,運算量龐大。隨后提出的ESPRIT算法[7]無需譜峰搜索,直接得到參數估計的閉式解,顯著地減少了運算量。然而,ESPRIT算法受限于陣列子陣結構,無法直接應用于自身無平移不變結構的陣列。針對此問題,虛擬內插方法[8]和高階累積量技術[9]對陣列進行不同的擴展,從新的角度構造旋轉不變因子,從而進行ESPRIT算法,同樣得到了閉式解。文獻[10]中,Friedlander B等人將不具備旋轉不變性的任意結構傳感器陣列,通過虛擬內插方法,變換成另一個等距均勻線陣,再尋求等距均勻線陣的旋轉不變結構,實現了任意陣列波達方向的閉式解。基于虛擬內插實現ESPRIT算法,可將任意陣列變換一個或幾個與自身結構完全一樣,只是位置上有相對平移的虛擬陣列,利用真實陣列與虛擬陣列間的旋轉不變性實現信號波達方向的求解。虛擬內插變換技術還可應用于寬帶信號處理,前后向平滑算法,以及求根MUSIC中[11]。虛擬內插類算法以其獨特的優勢而備受關注,興起了傳感器信號處理研究的新熱點。
本文提出了一種多對稱虛擬變換二維波達方向估計算法,該算法通過對任意陣列進行多對稱虛擬變換,基于虛實子陣構造一種特殊的旋轉不變因子矩陣,利用該旋轉不變因子矩陣進行信號源俯仰角的求解,再基于該俯仰角進行方位角的搜索。估計的方位角和俯仰角可自動配對,由于充分利用了多個虛擬陣列的累加接收數據,平滑了接收數據中的正負項誤差,抑制了虛擬變換矩陣導致的樣本數據偏差,顯著提高了二維波達方向的估計精度,仿真實驗證實了本文算法的有效性。
1 傳感器陣列和信號模型
假設P個遠場窄帶非相關信號源sp(t)(p=1,2,…,P)入射到如圖1所示的空間任意部署的M(M≥P)個各向同性的傳感器陣元組成的陣列A0上。
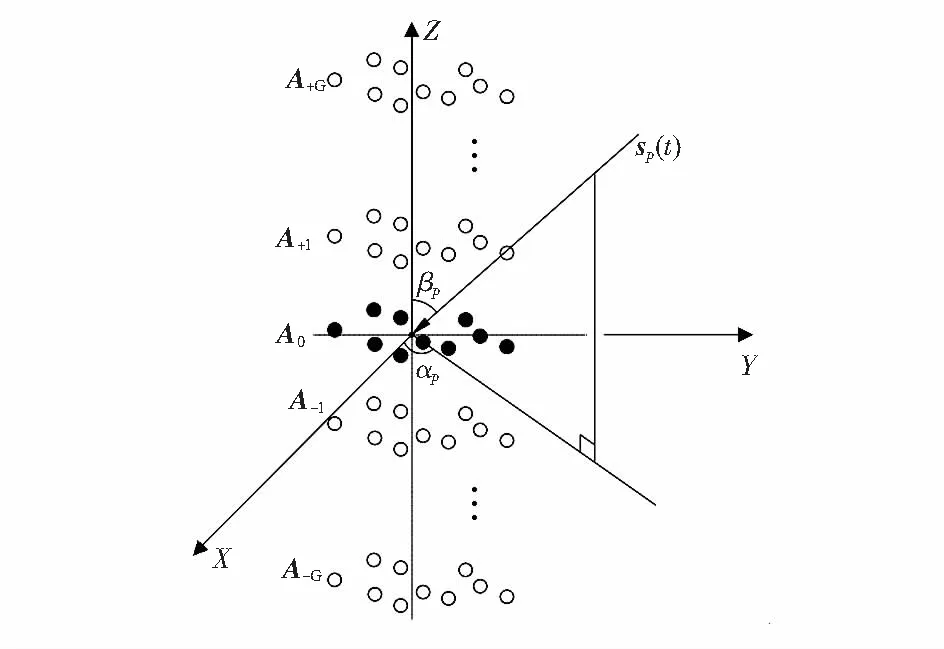
圖1 傳感器陣列結構
設第m個陣元的位置坐標為(xm,ym,zm)(m=1,2,…,M),選坐標原點為參考點,那么陣列在t時刻對應的輸出信號為
(1)
式中n(t)為陣列的加性白Gauss噪聲矢量,且
s(t)=[s1(t),s2(t),…,sP(t)]T
(2)
A=[a(α1,β1),a(α2,β2),…,a(αP,βP)]
(3)
a(αp,βp)=[a1p(αp,βp),a2p(αp,βp),…,
aMP(αp,βp)]T
(4)
amp(αp,βp)=e-j(2π/λ)Δ
(5)
Δ=xmcosαpsinβp+ymsinαpsinβp+zmcosαp
(6)
式中αp和βp分別為第p個入射波信號的方位角和俯仰角,λ為信號波長。
2 本文算法原理
設待估信號源位于某一個觀察區域內,該觀察區域定義為Θ,設該Θ區域的俯仰角的左右邊界分別為θβl和θβr,方位角的左右邊界分別為θαl和θαr;對該觀察區域的俯仰角和方位角均以步長為Δθ進行劃分
Θβ=[θβl,θβl+Δθ,θβl+2Δθ,…,θβr-Δθ,θβr]
(7)
Θα=[θαl,θαl+Δθ,θαl+2Δθ,…,θαr-Δθ,θαr]
(8)
則對該觀測區域,陣列θαl的陣列流行矩陣為
Af=[a(θαl,θβl),a(θαl+hΔθ,θβl+kΔθ),a(θαr,θβr)]
(9)

設存在關于陣列A0所在平面對稱的G組陣列A-1-A+1,A-2-A+2,…,A-g-A+g,…,A-G-A+G,第g(g=1,2,…,G)組對稱陣列中第m個陣元的坐標分別為P+gm(xm,ym,zm+dg),P-gm(xm,ym,zm-dg),則第g組對稱陣列對觀察區域Θ內的陣列流型矩陣為
A+g=[a+g(θαl,θβl),a+g(θαl+hΔθ,θβl+kΔθ),
a+g(θαr,θβr)]
(10)
A-g=[a-g(θαl,θβl),a-g(θαl+hΔθ,θβl+kΔθ),
a-g(θαr,θβr)]
(11)
這樣,陣列A0的陣列流型矩陣Af與第g組對稱陣列對區域Θ內的陣列流型矩陣之間存在對應的變換關系為
(12)
對Af進行奇異值分解Af=U[Σ,0][V1V2]H,從而得到變換關系為
(13)
利用以上變換關系可由陣列A0在t時刻輸出信號進行第g組對稱陣列在該時刻虛擬輸出變換
(14)
再由陣列之間的相對位置關系,可知
Ag=A-GΦg+G,g=-1,-2,…,G
(15)
Φ=diag(e-j2π/λdcos β1,e-j2π/λdcos β2,…,e-j2π/λdcos βp)
(16)
令
XΣ=X-G+X-G+1+…+Xg+…+XG-κ
(17)
XΓ=(X-G+X-G+1+…+X-G+κ-1)-
(XG+XG-1+…+XG-κ+1)
(18)
XΣ和XΓ列堆棧得到
(19)


(20)
(21)
式中span為矩陣的列張成,有且只有[12]唯一的非奇異矩陣T,使得下式成立
(22)
根據空間相對理論[13]有
span{US1}=span{Ξ}=span{US2}
(23)
再由式(19)兩子陣的陣列流型的關系,可得到兩子陣的信號子空間的關系
US2=Ξ(TT-1)ΛT=US1T-1ΛT=US1Ψ
(24)
由于信號互不相關,必有Λ=TΨT-1。
因此,Ψ的特征值與Λ的對角元素相等,T的列就是Ψ的特征向量,只要求得Ψ,就可以由式(16)求得信號的俯仰角βp。可求得Ψ的最小二乘法(LS)解ΨLS為
(25)
對ΨLS進行特征分解,也即獲得矩陣Λ的對角元素值,從而可以反解信號源的俯仰角βp,進而把解出的俯仰角βp代入陣列A0的陣列模型,即可通過一維MUSIC搜索獲得方位角的估計αp

(26)
式中Dp(p=1,2,…,P)為ΨLS特征值,angle為取復角主值。
3 仿真實驗
為驗證本文所提算法的性能,考慮空間任意傳感器如圖1所示,陣元數為M=10,G=5的任意陣列,各陣元坐標為(-0.33,0.1),(-0.13,0.18,0),(0.12,0.175,0),(0.33,0.1,0),(0,0.35,0),(-0.2,0.07,0),(0.2,-0.07,0),(0,-0.22,0),(-0.2,-0.28,0),(0.2,-0.28,0)。遠場窄帶信號源(俯仰角,方位角)為(20°,45°);變換扇區:俯仰角5°~25°,方位角35°~55°,步長均為1°。
實驗一不同信噪比和快拍下二維波達方向估計均方根誤差對比。
快拍數分別取400和1024,信噪比取-5~15 dB,各陣元噪聲為零均值白復高斯噪聲,圖2為1 000次獨立實驗下,本文算法與文獻[10]算法的二維波達方向估計均方根誤差對比仿真結果。
由圖2可以看出,兩種算法對信號源俯仰角及方位角估計的均方根誤差均隨信噪比及快拍的增大而降低,在相同快拍下本文算法優于文獻[10]算法。如圖2(a)所示,在對俯仰角進行估計低信噪比下,本文算法無論高快拍或是低快拍時,具有明顯的優勢,且本文算法低快拍下的估計誤差比文獻[10]算法高快拍的估計誤差還要小;在基于俯仰角對方位角進行一維MUSIC搜索時,如圖2(b)所示,兩種算法均是基于俯仰角一維搜索方位角,在相同的快拍數下,本文算法俯仰角和方位角的均方根誤差均小于文獻[10]算法。
實驗二不同信噪比和快拍下二維波達方向估計成功率對比。
快拍數分別取400和1 024,信噪比取-5~15 dB,各陣元噪聲為零均值白復高斯噪聲,以下為1 000次獨立實驗本文算法與文獻[10]算法的二維波達方向估計成功率對比仿真結果。
可以看出,兩種算法對信號源二維波達方向估計的成功率均隨信噪比及快拍的增大而增加,在相同條件下本文算法優于文獻[10]算法。如圖3(a)所示,在對俯仰角進行估計中,信噪比為5 dB時本文算法成功率已達100 %,此時,文獻[10]方法在400和1 024快拍下,具有約78 %和96 %的成功概率。如圖3(b)所示,基于俯仰角對方位角進行一維MUSIC搜索時,由于本文算法估計的俯仰角精度更高,因此,基于此搜索得到的方位角精度也高于文獻[10]的方法,因而成功概率也更高。綜合圖3可知,在高低兩種快拍場景下,本文算法在-5~15 dB的大動態范圍內均具有較高的估計成功概率。
4 結 論
提出一種多對稱虛擬變換的二維波達方向估計算法。該算法通過構造實陣列的多個虛擬平移子陣列,利用多個虛擬陣列的累加數據進行列堆棧,并結合空間相等理論,推導出一種新的虛實旋轉不變因子,求得信源俯仰角的閉式解。通過獲得的俯仰角,將二維搜索轉換為一維搜索,得到對應方位角的估計,明顯降低了經典二維MUSIC算法的搜索復雜性。由于采用了多個虛擬陣列的累加數據,顯著抵消了虛擬變換矩陣帶來的數據誤差,提高了估計精度。仿真實驗在大范圍的信噪比場景下,對低、高不同快拍的應用情況,進行了估計精度的均方根誤差統計,和成功概率性能比較,結果表明了本文算法的有效性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
