空間柔性機(jī)械臂高階滑模干擾觀測(cè)器軌跡跟蹤
2019-01-15 08:15:32王思明
傳感器與微系統(tǒng) 2019年2期
楊 洋, 王思明
(蘭州交通大學(xué) 電氣與自動(dòng)化工程學(xué)院,甘肅 蘭州 730070)
0 引 言
考慮到太空環(huán)境的特殊性[1~3],為了更有效地完成軌跡跟蹤任務(wù),本文采取二連桿的機(jī)械結(jié)構(gòu),針對(duì)機(jī)械臂抗干擾等問(wèn)題進(jìn)行控制研究。
于瀟雁等人[4]主要采取了魯棒控制,針對(duì)振動(dòng)最優(yōu)問(wèn)題利用奇異攝動(dòng)法將漂浮基二連桿機(jī)械臂系統(tǒng)分為快慢2個(gè)子系統(tǒng)并設(shè)計(jì)了狀態(tài)觀測(cè)器。王興龍等人[5]研究了速度增益矩陣的動(dòng)態(tài)調(diào)整方法,對(duì)二連桿機(jī)械臂進(jìn)行MATLAB和ADAMS聯(lián)合仿真,有效地抑制了系統(tǒng)的外界干擾及抖動(dòng)。Muhammad Saad等人[6]運(yùn)用非線性分離原則設(shè)計(jì)了機(jī)械臂基于級(jí)聯(lián)高串聯(lián)狀態(tài)觀測(cè)器,使用高增益參數(shù)有效地跟蹤了非線性機(jī)械臂運(yùn)動(dòng)軌跡。Martino Capurso等人[7]運(yùn)用卡爾曼預(yù)估器原理進(jìn)行物理學(xué)建模,提出了一種無(wú)傳感器的LTP方法并且已實(shí)際運(yùn)用于現(xiàn)在冗余機(jī)械臂中,為軌跡跟蹤問(wèn)題提出了一種更為快速的方法。Hisashi Tamashima[8]主要針對(duì)雙關(guān)節(jié)機(jī)械手軌跡跟蹤問(wèn)題提出了一種向量不同,階級(jí)不同改進(jìn)狀態(tài)觀測(cè)器。
以上諸多問(wèn)題都是基于給定擾動(dòng)的簡(jiǎn)單方程進(jìn)行在線控制,而對(duì)于漂浮狀態(tài)下的機(jī)械臂可能產(chǎn)生的復(fù)雜擾動(dòng)方程并沒(méi)有給出具體的控制方法,且上述先進(jìn)算法計(jì)算量較大,極容易使操作者產(chǎn)生視覺(jué)生理疲勞,且需要具體研究對(duì)象的初始速度,以及需要實(shí)時(shí)監(jiān)控?cái)?shù)據(jù),雖然實(shí)現(xiàn)了良好的跟蹤效果,但是過(guò)程較為繁瑣。
本文以漂浮基二連桿機(jī)械臂為研究對(duì)象,針對(duì)機(jī)械臂在漂浮狀態(tài)中極易產(chǎn)生內(nèi)部碰撞產(chǎn)生隨機(jī)擾動(dòng)的問(wèn)題,利用高階滑模算法設(shè)計(jì)了干擾觀測(cè)器,首先利用拉格朗日方程對(duì)系統(tǒng)進(jìn)行物理建模,結(jié)合對(duì)應(yīng)的控制律以及跟蹤軌跡方程對(duì)系統(tǒng)進(jìn)行模擬仿真實(shí)驗(yàn),最后將控制器運(yùn)用于復(fù)雜方波軌跡中,實(shí)驗(yàn)結(jié)果表明,該方法不僅可以抑制系統(tǒng)產(chǎn)生的擾動(dòng),還可運(yùn)用于更為復(fù)雜的軌跡中,有效地減少擾動(dòng)精確跟蹤期望軌跡。
1 二連桿機(jī)械臂建模
假設(shè)[9]:1)二連桿機(jī)械臂為鋼體結(jié)構(gòu);2)空間忽略微重力對(duì)系統(tǒng)的影響;3)當(dāng)系統(tǒng)在漂浮狀態(tài)下,關(guān)節(jié)鉸和關(guān)節(jié)軸均為鋼體結(jié)構(gòu)。
因此,建立的二連桿機(jī)械臂模型如圖1所示。建立慣性坐標(biāo)系∑I,基座坐標(biāo)系∑O,關(guān)節(jié)坐標(biāo)系∑i和末端執(zhí)行器坐標(biāo)系∑e,O為慣性坐標(biāo)系的原點(diǎn),C0為基座的質(zhì)心,Ci(i=0,1,2)為連桿質(zhì)心,Ji(i=0,1,2)為連桿i到連桿i+1的關(guān)節(jié),CM為二連桿機(jī)械臂系統(tǒng)總質(zhì)心,r0∈R2為基座質(zhì)心位置矢量,ri∈R2(i=0,1,2)為連桿質(zhì)心位置矢量,rc∈R2為質(zhì)心位置矢量,re∈R2為末端執(zhí)行器位置矢量,pi∈R2(i=0,1,2)為連桿位置矢量。
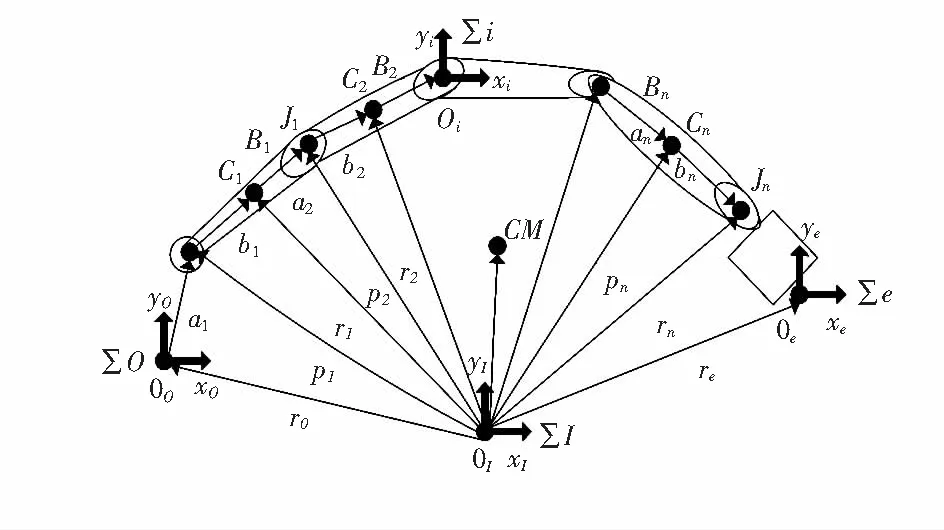
圖1 二連桿空間機(jī)械臂平面結(jié)構(gòu)模型
設(shè)機(jī)械臂各分部均在慣性坐標(biāo)上運(yùn)動(dòng),由于忽略微重力,系統(tǒng)動(dòng)量守恒,固由Lagrange第二類(lèi)方程可得漂浮下的機(jī)械臂系統(tǒng)運(yùn)動(dòng)學(xué)方程為
(1)
式中D(q)為系統(tǒng)7×7正定慣性矩陣,系統(tǒng)軌跡期望角q=[q0q1q2]T,系統(tǒng)角度補(bǔ)償量θ=[θ11θ12θ21θ22]T,C(q,q)∈R7×7為系統(tǒng)所受哥式力,離心力7階矩陣,非線性二連桿機(jī)械臂剛性矩陣為Z∈R6×6,系統(tǒng)電機(jī)驅(qū)動(dòng)力矩矩陣為τ=[τ1τ2]T。
為了更方便地進(jìn)行控制律設(shè)計(jì),式(1)中所描述的系統(tǒng)具有以下幾個(gè)定理:
?Ω∈R7×7
(2)
(3)
式中W0∈R7×7為關(guān)節(jié)變量回歸矩陣,I1∈R1×7為系統(tǒng)驅(qū)動(dòng)參數(shù)向量矩陣。
2 空間機(jī)械臂干擾觀測(cè)器高階滑模控制律設(shè)計(jì)
2.1 干擾觀測(cè)器數(shù)學(xué)建模
根據(jù)上述對(duì)二連桿機(jī)械臂數(shù)學(xué)建模,將式(3)寫(xiě)成對(duì)角矩陣的形式,可得到
(4)
二連桿機(jī)械臂中電機(jī)的驅(qū)動(dòng)方程為
RI1+L1+K2r-1=v(t)
(5)
式中v(t)為電機(jī)電壓矢量,L和K分別為二關(guān)節(jié)不同電機(jī)驅(qū)動(dòng)系數(shù)。將I1從式(4)代入到式(5)有
W0vR-1
(6)
此時(shí),假設(shè)一個(gè)n維空間關(guān)節(jié)位姿向量p存在于慣性坐標(biāo)系中,則p可表示為[10]

(7)
J(q)為Jacobian矩陣,對(duì)式(7)求導(dǎo),可得
(8)
將式(7)、式(8)代入式(6)中,可得
(9)
為了使式(9)能夠更直觀地計(jì)算出基于此模型的干擾觀測(cè)器數(shù)學(xué)模型,所以,對(duì)式(9)求逆矩陣,并寫(xiě)成狀態(tài)輸出矩陣為
(10)
求得系統(tǒng)輸出u(t)得
u(t)=J-T(q)W0R-1v(t)
(11)
將觀測(cè)器與系統(tǒng)實(shí)際輸出相聯(lián)系,求解觀測(cè)器模型為
L(t)=(D-1(q)-I)u(t)-D-1(p+
C(q,)
(12)
2.2 高階滑模控制律設(shè)計(jì)
基于上述觀測(cè)器數(shù)學(xué)模型,定義x1=q,x2=, 將系統(tǒng)寫(xiě)成狀態(tài)方程為
(13)
式中k為系統(tǒng)補(bǔ)償矩陣,為了使得到的滑模控制律能使系統(tǒng)能觀能控,假設(shè):
假設(shè)1存在正定矩陣P,Q使矩陣K滿足如下方程式
(Ai-BiKi)Pi+Pi(Ai-BiKi)=-Qi,i=1,2
(14)
假設(shè)2式(13)中補(bǔ)償矩陣k滿足
|ki|≤u(t),i=1,2
(15)
首先將系統(tǒng)控制律寫(xiě)成
(16)
定義
(17)
將式(12)、式(13)代入式(17)中,并對(duì)式(17)求導(dǎo),得到

(18)
根據(jù)上式,首先定義滑模面為
Φ=x1-x1d
(19)
對(duì)滑模面求二階導(dǎo)數(shù)
(20)
由式(20)可知,滑模面已出現(xiàn)控制量,為了更有效抑制擾動(dòng)得到控制量,則對(duì)式(20)求出三階導(dǎo)數(shù),得

(21)
由式(21)可知,各個(gè)參數(shù)階次相加,系統(tǒng)共6階,而此方程中有關(guān)于驅(qū)動(dòng)電機(jī)的電流、電壓參數(shù),這兩個(gè)參數(shù)在實(shí)際運(yùn)行中較為波動(dòng),不容易檢測(cè)到,固本文在此基礎(chǔ)上重新添加一個(gè)補(bǔ)償正切函數(shù),重新表示函數(shù)如下
(22)
(23)
式中λ1與λ2分別為對(duì)角矩陣,且‖λ1‖>‖λ2‖;系統(tǒng)在關(guān)節(jié)空間運(yùn)行過(guò)程中,ε1與ε2都為7階矩陣,且分別為兩個(gè)電機(jī)驅(qū)動(dòng)實(shí)時(shí)預(yù)估值。
得到預(yù)估值后,定義新的變量Γ1∈R7×7,Γ2∈R7×7,Γ3∈R7×7,將式(20)、式(21)重新表示為
(24)
本文研究的目的轉(zhuǎn)化為式(24)的零點(diǎn)收斂問(wèn)題,則可初步設(shè)置控制律為
(25)
式中f(t)為待設(shè)計(jì)階矩陣,其通用公式一般寫(xiě)為
f(t)=-d1|Γ1|a1tanh(|Γ1|)-d2|Γ2|a2tanh(|Γ2|)-
d3|Γ3|a3tanh(Γ3|)
(26)
式中d1,d2,d3為3個(gè)7階對(duì)角矩陣,并且滿足Hurwitz多項(xiàng)式定理[11],a1,a2,a3為3個(gè)參數(shù)滿足
(27)
由于系統(tǒng)在運(yùn)行過(guò)程中,不可避免地存在干擾,則在滑模函數(shù)一般形式上增加一個(gè)積分函數(shù)來(lái)抑制干擾,積分滑模函數(shù)為

(28)
對(duì)式(24)所得的系統(tǒng),重新分配參數(shù)設(shè)計(jì)控制器如下
(29)
2.3 系統(tǒng)穩(wěn)定性證明
定義Lyapunov函數(shù)為[12]
V=1/2sTs
(30)
求導(dǎo)可得
(31)
將式(24)、式(26)、式(29)代入式(31)中,化簡(jiǎn)并將已知參數(shù)代入可得
=-sT{D-1(x1)·
(32)
由李雅普諾夫定理可知,系統(tǒng)在有效時(shí)間內(nèi)收斂,固系統(tǒng)穩(wěn)定性得證,此高階滑模控制器可用于模型中。
3 高階滑模干擾觀測(cè)器仿真研究
在MATLAB中對(duì)圖1進(jìn)行模擬仿真實(shí)驗(yàn),采用文獻(xiàn)[13]的系統(tǒng)參數(shù),式(12)觀測(cè)器模型和式(29)的高階滑模控制律進(jìn)行編程仿真,具體參數(shù)體現(xiàn)如下:載體B0:m0=40 kg,L0=1.5 m,J0=34.17 kg·m2;剛性臂B1:m1=2 kg,L1=3.0 m,J1=1.50 kg·m2;剛性臂B2:m2=1 kg,L2=3.0 m,J2=0.75 kg·m2。控制器參數(shù)選擇為
仿真過(guò)程中加入外界干擾和粘性摩擦為
F()=sgn()+k
(33)
設(shè)關(guān)節(jié)一和關(guān)節(jié)二的理想軌跡分別為:x1d=15×sin(0.2πt),x2d=8×sin(0.6πt)仿真時(shí)間為10 s,仿真結(jié)果如圖2所示。
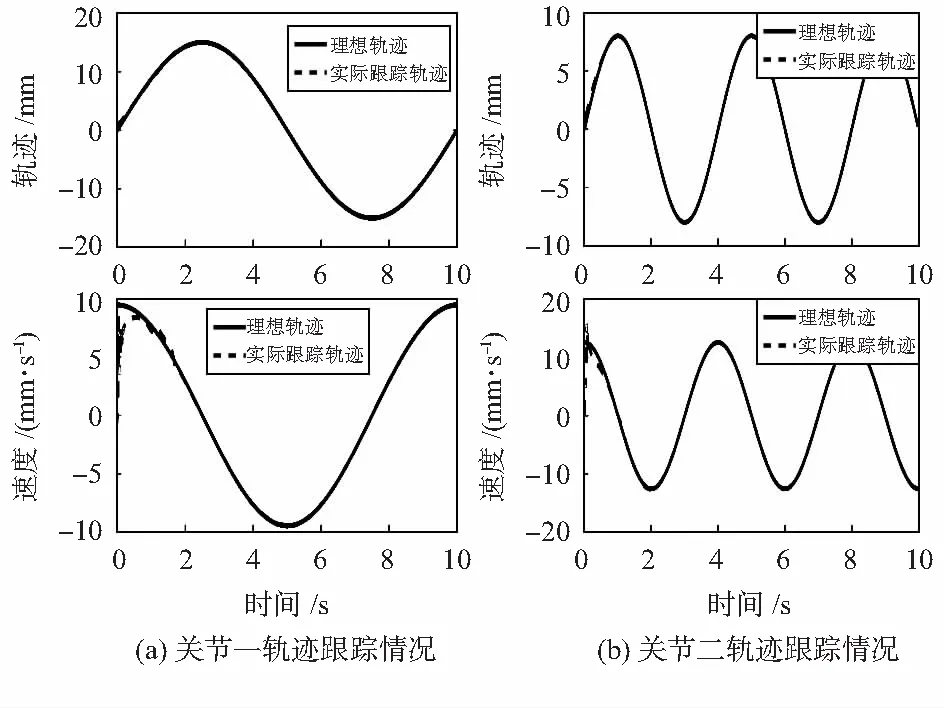
圖2 仿真結(jié)果
圖2(a)為關(guān)節(jié)一軌跡跟蹤情況曲線,黑色實(shí)線為期望軌跡,紅色虛線為系統(tǒng)實(shí)際運(yùn)行曲線,下圖為關(guān)節(jié)一速度跟蹤曲線,圖2(b)跟圖2(a)類(lèi)似,由于滑模算法本身具有抖動(dòng)效果,所以,系統(tǒng)在剛運(yùn)行過(guò)程中跟蹤效果并不是很好,但關(guān)節(jié)一與關(guān)節(jié)二在大約1 s內(nèi)逐漸跟蹤上期望軌跡,并在接下來(lái)9 s的運(yùn)行中,并未出現(xiàn)較為明顯的抖動(dòng)和誤差,跟蹤效果較為良好。
在關(guān)節(jié)一和關(guān)節(jié)二上的加摩擦力曲線,在干擾觀測(cè)器的觀測(cè)下,效果如圖3所示。
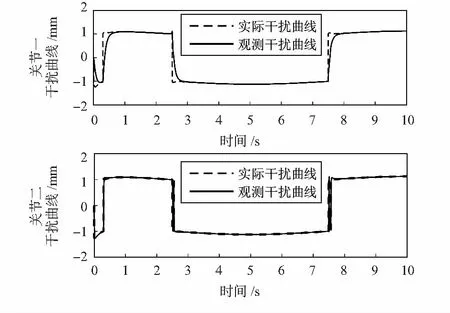
圖3 關(guān)節(jié)一與關(guān)節(jié)二干擾觀測(cè)效果
由圖3可知,系統(tǒng)剛開(kāi)始運(yùn)行觀測(cè)效果較不明顯,但是關(guān)節(jié)一與關(guān)節(jié)二大約在1 s之后,觀測(cè)器能精確觀測(cè)到干擾曲線,而并未出現(xiàn)較為明顯的誤差。
為了更進(jìn)一步證明此算法能運(yùn)用于更為復(fù)雜的情況中,將機(jī)械臂理想曲線改為方波曲線進(jìn)行進(jìn)一步調(diào)試,結(jié)果表明,將此算法運(yùn)用于方波軌跡中,系統(tǒng)在1 s后也與理想軌跡想重合,在后期工作中系統(tǒng)并為出現(xiàn)過(guò)大的波動(dòng)。
4 結(jié) 論
實(shí)際仿真結(jié)果表明,在短時(shí)間內(nèi)能夠?qū)崿F(xiàn)跟蹤理想軌跡的任務(wù),能夠?qū)崟r(shí)監(jiān)控系統(tǒng)所受到的干擾摩擦等因素,不僅能夠應(yīng)用于正弦或者余弦曲線,亦能應(yīng)用于方波曲線中。該研究對(duì)空間機(jī)械臂提供了一個(gè)新型的算法進(jìn)行參考,同時(shí)也為該控制領(lǐng)域提供了一個(gè)新的方向。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電腦報(bào)(2019年40期)2019-09-10 07:22:44
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
