基于遞推最小二乘的三軸磁強計在線自校正方法
2019-01-15 05:02:18向奉卓李廣云王安成俞德崎
傳感器與微系統 2019年2期
關鍵詞:磁場
向奉卓, 李廣云, 王 力, 王安成, 俞德崎
(1.信息工程大學 地理空間信息學院,河南 鄭州 450001;2.信息工程大學 數據與目標工程學院,河南 鄭州 450001)
0 引 言
隨著科技的進步和經濟的快速發展,人們對位置服務的需求越來越高。而傳統的導航定位設備[1,2]大都成本高昂、結構復雜,不利于技術推廣。近年來,微機電系統(micro-electro-mechanical system,MEMS)的快速發展,使低成本、低功耗、小體積的MEMS姿態傳感器[3,4]越來越多地用于民用導航領域。在低成本的航姿參考系統中,航向信息主要通過電子羅盤獲取[5,6],其核心原件就是三軸磁強計,磁強計通過測量地磁矢量信息來獲取航向。而在實際的應用中,周圍的干擾磁場會對其產生嚴重影響導致所測量的航向值含有較大的誤差,不能直接用于導航定位[7]。因此有必要對磁強計進行誤差校正以提高其工作性能、獲取可靠的航向信息。文獻[7]提出了基于遞推最小二乘的羅差校正方法,需要已知磁傾角和初始航向角的情況下才能完成,實用性較差。文獻[8]采用基于無磁轉臺的誤差分離標定方法,需要依靠外界參考信息,對實驗條件要求較高。文獻[9~11]提出的橢圓擬合算法,主要針對載體在二維平面下運動航向的誤差補償不適用于三維空間中的載體航向的修正如飛行器導航。文獻[12]提出的基于拓展卡爾曼濾波器實時自校正算法,需要確定合理的初始條件,且算法復雜。
①生產管理單位提前進廠費,不應計入“建筑安裝工程投資”,按《編規》規定,它是指在工程完工之前,為生產籌備發生的人工費、辦公費等費用,與生產職工培訓費性質類似,筆者認為應計入“其他投資”,形成交付使用資產—遞延資產。
本文提出一種基于遞推最小二乘的誤差在線自校正方法。方法以橢球假設[13,14]自動校正方法為基礎,利用原始的磁力計數據由遞推最小二乘算法實現橢球方程系數在線辨識,進而求得誤差校正參數。實驗結果表明該方法具有較高的實用性和可靠性,能有效校正硬磁和軟磁效應引起的誤差。
1 校正基本原理
1.1 誤差模型
三軸磁強計的工作原理是通過測量理想環境下地磁矢量在三軸的分量來獲取載體的航向信息。而在實際應用中,由于受到周圍環境中硬磁和軟磁效應的影響,磁強計的測量會產生較大誤差。其中硬磁效應主要是指載體的硬磁材料被磁化后產生的固定磁場,不隨傳感器位置變化而變化,可看作常量。軟磁效應指載體的軟磁材料被磁化后產生變化的磁場,軟磁誤差的大小與傳感器的姿態變化及周圍元器件的工作狀態都有關系。假定理想條件下,地磁矢量在磁強計坐標系中表示為C=[CxiCyiCzi]T,受到軟硬磁效應影響后傳感器的測量值為M=[MxiMyiMzi]T,根據Poisson模型[15]將兩者之間的關系表示為
(1)
式中 矩陣R=(Rij)3×3為軟磁干擾矩陣,在軟磁效應下,該矩陣滿足對角占優原則,即對角線上元素接近1,而非對角元素均較小接近零[15,16]。矩陣b=[bxbybz]T為硬磁效應對三軸產生的固定影響。
基于上文所提出的四模交叉諧振器結構,本文設計出了對應的四頻帶帶通濾波器。濾波器原型結構如圖3所示,它由兩個偽交指級聯形式耦合的四模交叉型諧振器組成,其中一些微帶線采用扭曲形式布線以減小電路板尺寸。
由式(1)知,求解軟磁干擾矩陣R和硬磁干擾矩陣b是實現磁強計誤差校準的關鍵,地磁矢量測量值校正模型可寫為
(2)
根據式(8)中參數辨識模型和遞推最小二乘算法原理,誤差在線校準的實現步驟如下:確定遞推初值,為提高橢球曲面方程系數辨識的精度,先將獲取到的大于所需辨識參數個數(A1~A9)的L組數據,利用最小二乘的方法求得參數的估計值(0)和協方差矩陣P(0),并作為遞推初值。令
1.2 橢球假設
在理想情況下,在同一位置旋轉磁強計所測得的磁矢量變化軌跡在三維空間中應該形成一個圓球面。而實際應用時,由于受到軟硬磁場的干擾所得磁向量變化軌跡為一個橢球面。根據式(1)整理為二次型可得
加強項目謀劃和資金爭取。突出產業發展等重點領域,分類分項謀劃一批重點項目。認真研究梳理國家、省各項政策,建立上級政策(項目)爭取指導目錄、信息對接、月度例會、跟蹤協調和督導問效等工作機制,加強協調對接,及時申報爭取各類政策(項目)資金支持。
MTM=(RC+b)T(RC+b)
可認為遞推過程結束。以上求解橢球曲面方程系數θ的過程也間接完成了誤差校正參數的在線辨識。根據校正模型,完成磁強計的誤差校準。
(3)
式中 由于R為軟磁干擾矩陣滿足嚴格對角占優,所以RTR為正定陣,MTM為一個橢球面,則三軸磁強計測量值[MxiMyiMzi]T應該滿足橢球曲面方程

我們的目的是得到一個多處理器的作業調度序列使得產生的總效用最大化,但這個問題是NP-hard問題[3],因此,我們考慮能否找到一個具有最優解的某些性質的解。首先考慮只有一個處理節點的簡單情況,我們將作業集合劃分為若干子集,使得算法得到的調度序列最優解形式上均為依次調度T1T2…Tm這m個子集中的作業。因此,我們要設計一個產生某個序列的調度算法,滿足以下目標:(1)算法序列應產生接近最佳值的值;(2)如果存在上述劃分,算法序列應該與之相兼容。此時,算法序列在子集層面上與最優調度序列保持一致。
由式(2)給出的誤差模型,C=[CxiCyiCzi]T應滿足球面方程,令Q=R-1,轉化為二次型
(4)
式中θ=[A1A2A3A4A5A6A7A8A9]T,n(i)為隨機測量噪聲。
1.女:一偉拜上關云長(一首拜上關云長),拜上云長保江山,若押保的荊州府(若你保得荊州府),五虎上將押頭名(五虎上將你頭名)。
P(i)=[I-K(i)mT(i)]P(i-1)
=MTQTQM-2bTQTQM+bTQTQb=r2
(5)
式中r為與當地地磁強度相關的未知常數,其大小僅影響誤差補償后地磁矢量的模長,本文通過地磁矢量投影到各坐標軸分量的比值來解算航向,因此r大小對最后的航向解算并無影響。
假設Q為對稱陣且滿足對角占優,則將式(5)展開與式(4)對比可得
(6)
式中k為未知常數。
求得Q和b后,可按C=Q(M-b)完成對測量值的誤差補償。則誤差校正模型式(2)中未知參數求解問題轉換為擬合橢球曲面方程系數求解,本文將通過遞推算法實現橢球曲面方程系數的在線辨識,進而求解誤差校正參數。
2 在線校正實現
遞推最小二乘算法能夠按照采樣的時間順序,每獲得一組新的磁場數據就修正一次橢球方程系數的估計值,隨著時間推移最后完成橢球曲面方程系數辨識,具有每次計算量少、占用內存小、能夠實現系數在線辨識等優點。
③對水泵各項指標數據,在現場測得幾項重要數據后依據水泵的使用情況、使用時間及當地水質情況,對照水泵型號表才能正確取得。采用水量實測的方法現場測得水泵每小時的實際出水量,采用三相異步電動機依據電流表的實測電流量除以2得到功率的方法獲得水泵的實際功率,通過水泵說明書或水泵揚程標牌及詢問管理人員等方式獲得水泵揚程。
為求取橢球方程系數θ,可將式(4)化為
z(i)=mT(i)θ+n(i)
(7)
式中
對待敷衍搪塞的采訪對象,不妨大小合適地扣一扣帽子,一市黨報,總不至于該拿熱臉去貼誰的冷屁股。剛干記者那會遲恒吃過顧慮拘謹的虧,灰溜溜地回部里告訴主任,主任不悅,打電話給市某局長,有反映你們局“五創提質”太弄虛作假,你們是不是來報社說一下情況。他起身吩咐遲恒守著,人來了就說我在樓上有事,讓他等。局長來了,也能耐著性子等。這課上得生動活潑,遲恒受益匪淺,后來在采訪調查幾個單位的問題時,有單位領導出面遮掩,很客氣地說某事要向遲記者匯報,遲恒就整個兒悟出他這個遲記者完全可以無級勝有級,練了段時間,膽兒粗了,脾氣長了,現在基本上能隨需要調整態度。
(8)
對上述矩陣12參數的求解的方法大都需要外界的參考基準,特定的實驗環境條件從而限制校正方法的推廣與使用[4,8],而基于橢球假設的自校準方法不依靠外界設備,僅依靠獲取的磁強計數據即可實現對校正參數的求解,適用于多種環境下的誤差校正。
K(i)=P(i-1)m(i)[mT(i)P(i-1)m(i)+1]-1
(9)
CTC=(M-b)TQTQ(M-b)
(10)
得到
為驗證本文提出算法的有效性,采用以HMC5883L磁阻傳感器為核心的電子羅盤作為實驗儀器,通過手持磁羅盤旋轉不同的姿態來獲取傳感器在不同方位的三軸磁場數據。具體實驗步驟如下:
(11)
迭代計算式(9)~式(11),直到待辨識的參數估計值變化不大ε時即滿足關系式

(12)
=CTRTRC+2bTRC+bTb
3 實驗與結果分析
聯合國教科文組織(UNESCO)在1997年3月推出的“國際教育標準分類”中將高等職業教育與普通高等教育并列劃分[1].高等職業教育不是從屬于普通高等教育的更低層次的組成部分,而是一種獨立存在的教育類型.高等職業教育與普通高等教育不同的培養目標從根本上決定了它們在選拔方式、培養目標以及學習內容等方面存在明顯差異.
1)為了盡可能采集到傳感器在各個方向下磁場數據,使獲得的原始數據盡可能在球面均勻分布。實驗中采用手持傳感器進行“8”字晃動來獲取數據,共采集1 000組數據,導出數據并繪圖,如圖1所示。圖中記錄了通過變換姿態采集數據時的磁場軌跡,可以看出磁場數據分布類似一個橢球面。

圖1 校正前磁強計測量值
2)選取采樣數據中的前10組,根據最小二乘算法求取遞推初值和協方差矩陣P(0)。
從當前的實際情況來看,現有的鄉村生態旅游經營形式還比較單一,鄉村生態旅游產品還存在同質化的特征。這種服務形式,也是無法滿足消費者的個性化需求的。因此,在實際情況中,鄉村生態旅游經營者就應該積極地創新服務形式,突出當地的特色,積極地創建一些體驗價值高的鄉村生態旅游產品。另外,鄉村生態旅游者也可以積極地采取各種有效措施去深入地挖掘社會中各個旅游群體的實際需求,從而為他們提供具有針對性、個性化的服務。
3)采用文中提出的遞推最小二乘算法,根據式(9)~式(12)利用獲取的磁場采樣數據實現對橢球方程系數的在線辨識。由得到的橢球曲面方程系數將磁場數據擬合得到一個橢球面,如圖2所示,圖中可以看出由于受到硬磁和軟磁效應的干擾,磁強計輸出值發生了嚴重畸變,擬合橢球的球心并不在原點發生了偏移,整個球體在三維坐標系下產生了微小的旋轉,球體三軸的長度發生了不同程度的縮放,使圓球變成了橢球。
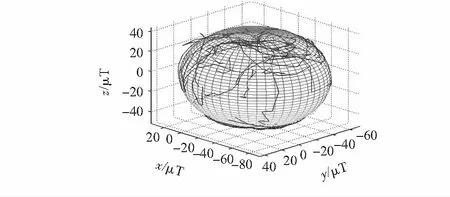
圖2 校正前的地磁擬合球面
4)由步驟(3)求得的橢球方程系數,按照式(6)中橢球曲面方程系數與誤差校正模型參數之間的對應關系,求解校正模型參數。在本實驗條件下求得誤差校正矩陣Q和b
采用直接在家具成品上測試時,要選取家具中的主要面層,要求可檢測面部位表面平整,無鼓泡、劃痕、褪色、皺皮等缺陷。
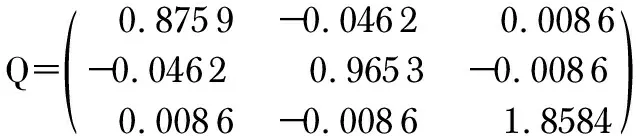
b=[-27.295 6 -12.923 7 -4.932 7]T
黨的十九大對鄉村振興戰略提出了“產業興旺、生態宜居、鄉風文明、治理有效、生活富裕”的20字總要求。2018年是實施鄉村振興戰略的開局之年。“鄉村振興戰略”如何破題?
對原始測量值進行誤差校正,畫出校正后磁場數據分布,如圖3(a)所示。按照步驟(3)中方法對校正后的數據進行擬合并畫出擬合的球面,如圖3(b)所示。從圖中可以看出根據誤差校正模型對磁場數據的誤差校正效果比較明顯,擬合球體的球心基本位于原點,三軸的長度也近似相等,對產生的微小旋轉也進行了一定程度的修正。
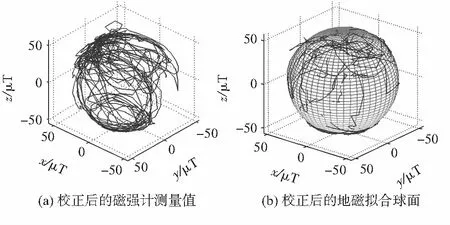
圖3 誤差校正
在理想條件下,定點處地磁矢量模長相等,因此,傳感器同一位置變換不同的姿態所獲取的磁場數據應該擬合成一個圓球面,根據圓球曲面上任意一點到球心距離相等,所以曲面上各采樣點處磁場強度大小應該相近,不存在大的數據波動。以原始測量數據磁場強度均值為基準,求取誤差標準差作為校正效果評定指標。分析對比校正前后各采樣點磁場強度大小的變化,可知,誤差校正前采樣點磁場強度大小波動幅度較大高達67.112 8,誤差標準差為15.828 7,經過誤差校正的磁場強度大小波動幅度明顯減小最高為14.064 8 ,誤差標準差為6.345 1 。結果表明,利用基于遞推最小二乘的誤差校正方法可以有效地校正軟磁和硬磁效應對測量數據產生的誤差。
4 結 論
本文所設計的基于遞推最小二乘的磁強計誤差校正方法能夠完全由傳感器自行完成誤差的計算與校正,具有方便、有效、實用性強、能夠在線校正等優點,適用于無外部參考基準下三軸磁強計的誤差自動校正。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23
