被動聲吶多目標自動檢測與跟蹤算法研究
2019-01-12 02:43:26高運孫德龍周勝增
聲學與電子工程 2018年4期
高運 孫德龍 周勝增
(上海船舶電子設備研究所,上海,201108)
多目標自動檢測與跟蹤是現代聲吶的重要組成部分,該系統有助于在多維信息高速接收的情況下減小聲吶員的工作量,使水下探測功能得以實現。然而由于雜波、多途干擾、信噪比較低、目標多等原因,水下環境對多目標檢測及跟蹤是一個極具挑戰的領域。用于雜波環境中的多目標跟蹤的最佳算法(多假設跟蹤)具有按指數增加的計算量和存儲要求,基于這個原因,為了解決多目標跟蹤問題提出了許多次優算法,這些算法常常會在跟蹤性能與算法之間進行折中。
國外泰雷茲公司[1]及阿特拉斯電子公司[2]分別給出了高性能的隱馬爾科夫與改進的多假設跟蹤算法及跟蹤仿真結果,仿真結果顯示此類算法具有較好性能,但其復雜度高,對目標先驗信息要求較高,不易應用于工程實踐。國內中科院聲學所[3]給出了一種基于圖像處理的跟蹤算法,解決了圖像處理中的實時性問題。文獻[4]給出了最鄰近卡爾曼濾波器(Strongest Neighbor Kalman Filter,SNKF)的海試數據跟蹤結果,在復雜的環境下SNKF表現出較好的性能。
本文在寬帶相關檢測的基礎上,以SNKF作為跟蹤算法的核心,給出了一種被動聲吶多目標自動檢測與跟蹤算法,海試數據的檢測及跟蹤結果顯示,該算法很好的解決了軌跡交叉及中斷問題,算法計算量小,易于工程實踐。
1 自動檢測
1.1 寬帶相關檢測算法原理[5-7]
寬帶相關檢測即將接收基陣劃分為相等的兩半,以形成同向波束對,并使其輸出具有復雜的互相關性。在給定足夠的信噪比時,由此處理過的相位輸出將提供寬帶能量十分之一波束分辨率的方位測量信息。值得注意的是,相比于寬帶能量檢測,利用寬帶相關檢測會產生1.5 dB的損失,它是為了提高方位分辨力所付出的代價。其原理流程如圖1所示。
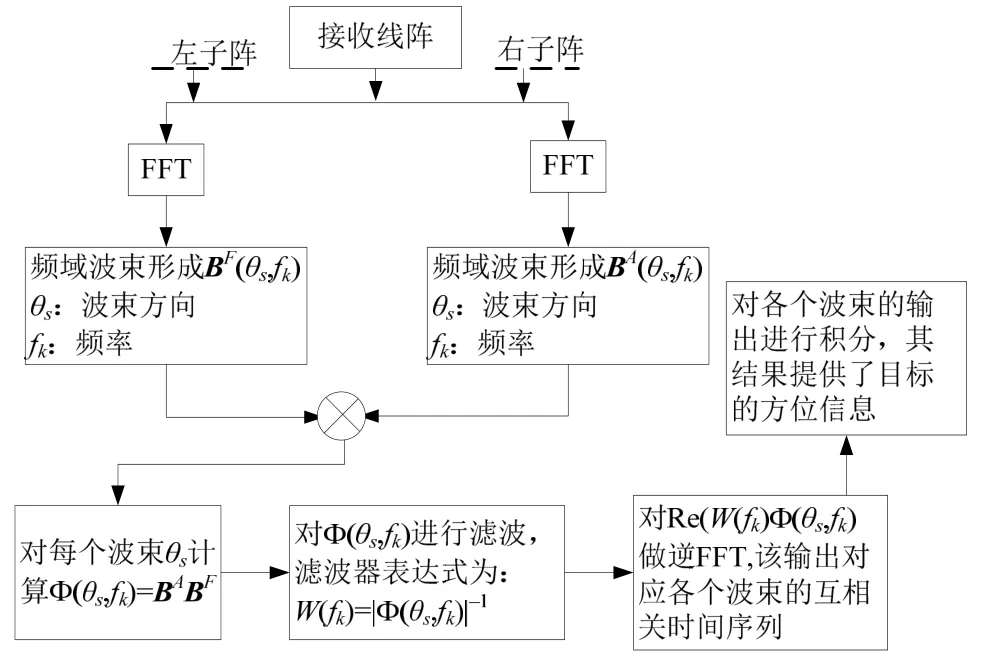
圖1 分裂波束算法流程框圖
1.2 峰值的提取原則
本文將文獻[8]中對功率譜峰值的提取原則應用于寬帶互相關算法的檢測輸出。該原則陳述如下:
(a)一個峰必須具有左右邊界,且左右邊界的寬度小于某個門限,此門限與角度分辨率有關。
(b)峰的左右邊界的斜率必須超過某一門限。提取的峰值必須是尖銳的。
(c)峰值的幅度必須超過某一門限,此門限可根據要求的檢測概率及虛警概率設定。峰值提取結果如圖2所示。
2 自動跟蹤
2.1 軌跡初始化
本文采用一種基于邏輯的軌跡初始化方法[9],在該方法中會設置多個門限,當某一檢測序列滿足這些門限時,認為這一檢測序列為有效軌跡。該邏輯可以陳述如下:
(1)將所有未被關聯起來的測量值視為一個軌跡起始點。
(2)在該起始點出現的后一拍,設置一個有效區域,區域的大小取決于目標運動參數的最大值、最小值以及觀測噪聲值。如果下一拍中有測量值落入該區域,那么兩次測量值便形成一條初始軌跡,如果沒有測量值落入該區域,那么便將該起始點刪除。
(3)初始軌跡中出現前后兩個批次的測量值,便可以對卡爾曼濾波器進行初始化。通過該濾波器得到初始軌跡下一拍的有效區域。
(4)從第三拍開始,采用N拍之中有M個測量值落入有效區間中的邏輯,若某一檢測序列滿足該判斷邏輯,那么便認為該初始軌跡為真實存在的目標軌跡,否則將該初始軌跡刪除。

圖2 峰值提取結果
2.2 SNKF原理[10]
2.2.1 卡爾曼濾波原理
目標運動方程:

式中,xk為2維狀態向量(角度及角度變化率),Fk為狀態轉移矩陣,wk為系統噪聲。假定其均值為零的高斯白噪聲,協方差E(wkw'j)=Qkδkj。觀測方程:

式中,Hk已知,yk為觀測噪聲。假定其均值為零的高斯白噪聲,協方差E(yky'j)=Rkδkj。卡爾曼濾波原理及流程如圖3所示。
2.2.2 最強鄰近原理
在卡爾曼濾波的基礎上,利用式(3)計算出一個有效區間,當有多個觀測值落入此有效區間內,選擇其中信噪比最強的觀測值對此濾波器進行更新。
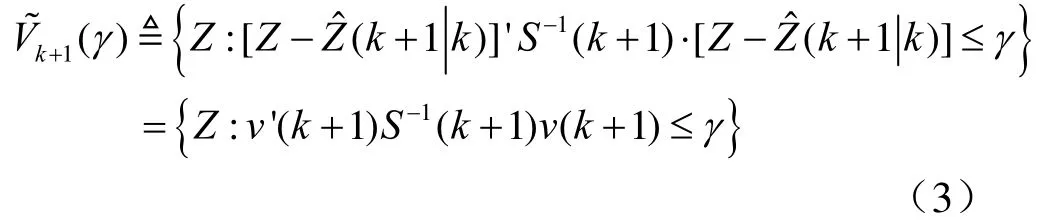
式中,γ對應該區間的大小。
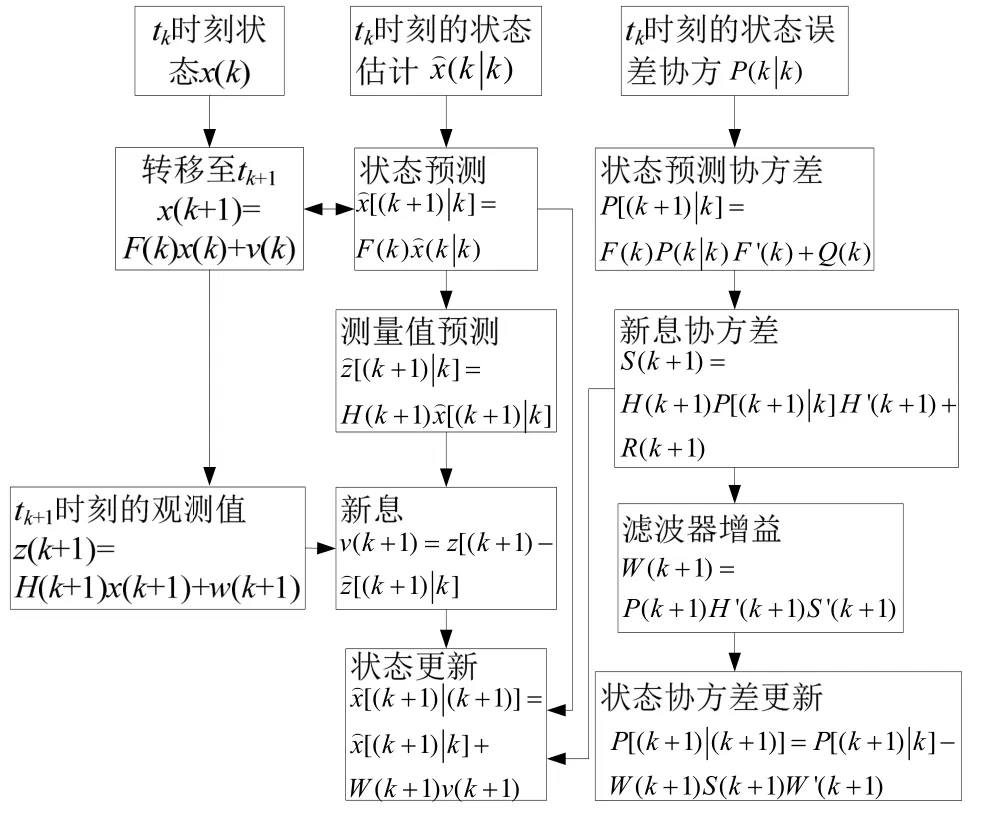
圖3 卡爾曼濾波器工作原理圖
3 軌跡與軌跡之間的關聯[1]
在工程實踐中,目標軌跡通常會因某一時刻信噪比過低或者目標交叉而出現軌跡中斷,這樣會產生同一目標卻給出多個批號的的問題。因此需要判斷兩條軌跡是否屬于同一目標的邏輯。該邏輯陳述如下:
(1)利用最小二乘擬合計算出中斷軌跡的角度變化率,向前預測直至新軌跡出現,記錄預測位置。
(2)新軌跡出現一定時間內,利用最小二乘擬合計算出角度變化率,記錄新軌跡出現位置(K+1)。
(3)利用式(4)計算兩段軌跡的馬哈拉諾比斯距離,判斷兩條軌跡是否屬于同一目標。
4 海試數據驗證
試驗海區深度55 m,沙泥底質,海況3級,惡劣水文條件,本艦航速14 kn,拖線陣放纜長度500 m,布放深度25 m,配合目標為水下高速目標,深度 20 m,左舷 130°,其他目標為水面船只。圖4給出了原始的海試數據,圖5給出了利用上述算法得到的跟蹤結果。結果顯示,該算法很好的解決了目標交叉及目標軌跡由于信噪比低而中斷的問題。
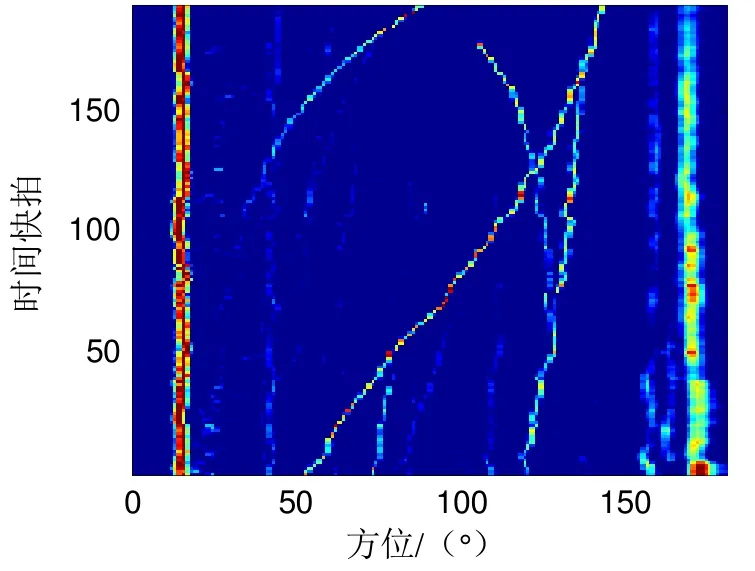
圖4 觀測值
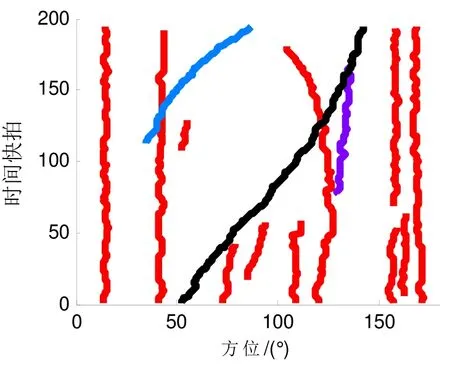
圖5 跟蹤結果
5 結論
本文給出了一種實用的被動聲吶多目標自動檢測與跟蹤算法,該算法以分裂波束形成算法為檢測手段。其跟蹤算法部分,在SNKF基礎上,增加了軌跡與軌跡關聯功能,解決了由于目標軌跡中斷而產生的相同目標卻給出多個批號的問題,海試數據結果顯示,該算法效果顯著,具有工程實用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
海峽科技與產業(2016年3期)2016-05-17 04:32:12
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28