飛越適航噪聲時(shí)域信號(hào)預(yù)測(cè)方法研究
2019-01-11 00:35:12閆國(guó)華白偉偉
聲學(xué)技術(shù) 2018年6期
閆國(guó)華,白偉偉
?
飛越適航噪聲時(shí)域信號(hào)預(yù)測(cè)方法研究
閆國(guó)華,白偉偉
(中國(guó)民航大學(xué),天津 300300)
以往對(duì)發(fā)動(dòng)機(jī)有效感覺(jué)噪聲級(jí)的預(yù)測(cè)研究是通過(guò)1/3倍頻程譜進(jìn)行計(jì)算,從而得到發(fā)動(dòng)機(jī)地面預(yù)測(cè)有效感覺(jué)噪聲級(jí),而使用時(shí)域噪聲數(shù)據(jù)進(jìn)行發(fā)動(dòng)機(jī)有效感覺(jué)噪聲級(jí)預(yù)測(cè)的研究相對(duì)較少。研究了飛機(jī)起飛飛越過(guò)程中的噪聲傳播特性的計(jì)算方法,使用該方法來(lái)模擬計(jì)算飛機(jī)一臺(tái)發(fā)動(dòng)機(jī)在起飛飛越過(guò)程中地面飛越噪聲測(cè)量點(diǎn)接收到的時(shí)域噪聲信號(hào)數(shù)據(jù)。根據(jù)ANP數(shù)據(jù)庫(kù)數(shù)據(jù)計(jì)算飛機(jī)起飛飛越航跡,使用聲線法計(jì)算使用某時(shí)刻噪聲聲壓信號(hào)傳遞的路程和時(shí)間,根據(jù)飛機(jī)速度方向與飛越地面噪聲測(cè)量點(diǎn)的角度來(lái)確定該時(shí)刻噪聲信號(hào)的最大聲壓值,最后得出飛機(jī)發(fā)動(dòng)機(jī)在起飛飛越過(guò)程中部分時(shí)間內(nèi)地面噪聲測(cè)量點(diǎn)接受的時(shí)域信號(hào)數(shù)據(jù),對(duì)飛機(jī)噪聲適航審定提供一定的理論依據(jù)。
起飛飛越;發(fā)動(dòng)機(jī)噪聲;時(shí)域信號(hào)
0 引言
隨著社會(huì)的發(fā)展,人們生活水平逐步提高,對(duì)生活環(huán)境的要求越來(lái)越高。航空運(yùn)輸在人們?nèi)粘5某鲂兄衅鸬皆絹?lái)越重要的作用,飛機(jī)噪聲也是越來(lái)越成為人們關(guān)心的話題。要想減少和控制飛機(jī)噪聲,就要研究和了解飛機(jī)噪聲產(chǎn)生的原因和飛機(jī)噪聲的傳播特性。飛機(jī)發(fā)動(dòng)機(jī)的噪聲和飛機(jī)機(jī)體的噪聲是飛機(jī)噪聲的主要來(lái)源,其噪聲的產(chǎn)生原因和傳播特性成為飛機(jī)噪聲研究的重要內(nèi)容。發(fā)動(dòng)機(jī)是飛機(jī)噪聲的主要來(lái)源,其在飛行中產(chǎn)生的噪聲對(duì)飛機(jī)適航測(cè)量中有效感覺(jué)噪聲級(jí)的大小有重要的影響。
1 飛機(jī)飛越噪聲計(jì)算理論
在NASA的報(bào)告中,給出了飛機(jī)在飛越過(guò)程中,考慮了聲源點(diǎn)相對(duì)于地面噪聲測(cè)量點(diǎn)運(yùn)動(dòng),地面噪聲測(cè)量點(diǎn)接收信號(hào)的計(jì)算方式[1],聲波的波動(dòng)方程通常可以表示為

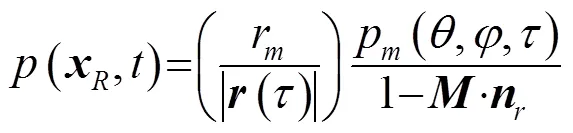

本文將根據(jù)飛機(jī)飛越噪聲信號(hào)計(jì)算方法,通過(guò)模擬飛機(jī)在飛越過(guò)程中發(fā)動(dòng)機(jī)的產(chǎn)生的噪聲信號(hào)來(lái)計(jì)算地面接收點(diǎn)收到的對(duì)應(yīng)噪聲信號(hào)。
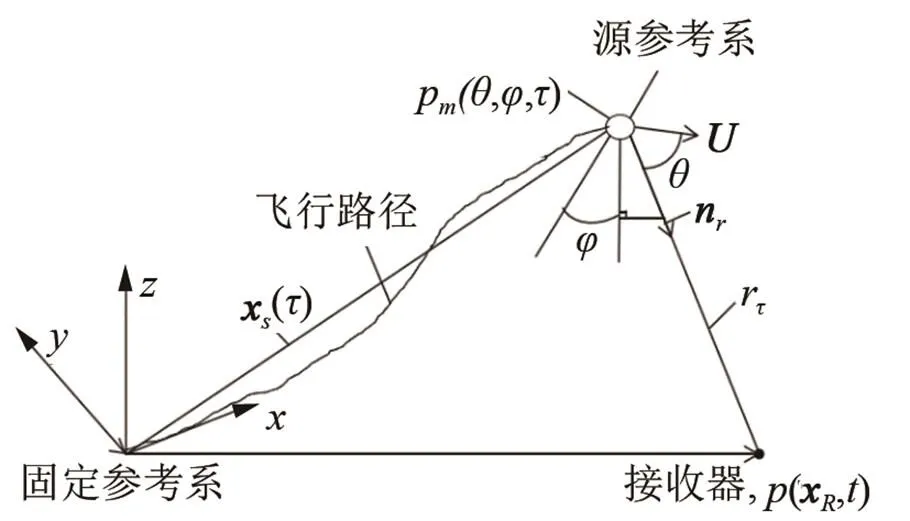
圖1 飛機(jī)一般飛越軌跡幾何圖
2 聲線法
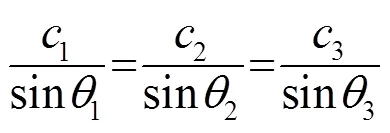
聲線是自聲源發(fā)出,代表聲能傳播方向的曲線。在各種同性的媒質(zhì)中,聲線代表波的傳播方向,處處與波陣面垂直。由于存在折射和反射現(xiàn)象,聲線不一定是直線,可以是折線或曲線,但聲線與波陣面始終正交。使用聲線法可以求出聲波傳播的實(shí)際路徑和到達(dá)時(shí)間。本文在計(jì)算發(fā)動(dòng)機(jī)地面噪聲時(shí)域數(shù)據(jù)時(shí),由于CCAR36規(guī)定飛機(jī)在噪聲適航審定中風(fēng)速很小,故不考慮風(fēng)速對(duì)聲波傳遞路徑的影響[2],計(jì)算在聲波從聲源發(fā)出,經(jīng)過(guò)二維平面到達(dá)地面測(cè)量點(diǎn)[3]。由于飛機(jī)的噪聲是在地表附近的空氣中傳播,可以忽略聲音的衍射。但隨著海拔高度的增加,音速減小,而聲音在不同音速層中分界面會(huì)發(fā)生折射,聲折射符合Snell法則:
在離地高度10 km以?xún)?nèi),聲速隨高度線性減少:

設(shè)聲源位于離地10 km以?xún)?nèi),僅考慮<10 km,即在聲速分布線性變化的介質(zhì)中,聲線的軌跡(如圖3所示)可以表示為

聲線為弧線時(shí),傳播時(shí)間為三角形內(nèi)聲線的積分:

3 飛機(jī)飛越過(guò)程中發(fā)動(dòng)機(jī)噪聲的計(jì)算
飛機(jī)在起飛飛越過(guò)程中發(fā)動(dòng)機(jī)的噪聲是其噪聲的主要來(lái)源,本文計(jì)算的目標(biāo)是使用發(fā)動(dòng)機(jī)地面試車(chē)時(shí)與發(fā)動(dòng)機(jī)在空中轉(zhuǎn)速相同的時(shí)域信號(hào),通過(guò)飛行修正后,作為發(fā)動(dòng)機(jī)在飛行過(guò)程中噪聲時(shí)域信號(hào),用聲線法計(jì)算得到地面噪聲測(cè)量點(diǎn)接收到的發(fā)動(dòng)機(jī)噪聲時(shí)域信號(hào)。由于無(wú)法收集到發(fā)動(dòng)機(jī)地面試車(chē)時(shí)噪聲時(shí)域信號(hào),故用發(fā)動(dòng)機(jī)地面試車(chē)時(shí)1/3倍頻程數(shù)據(jù)來(lái)模擬計(jì)算寬帶噪聲時(shí)域信號(hào)。發(fā)動(dòng)機(jī)噪聲時(shí)域信號(hào)包括寬帶噪聲和純音噪聲,所以用計(jì)算得到的寬帶噪聲來(lái)替代發(fā)動(dòng)機(jī)時(shí)域噪聲存在一定的誤差,但是可以通過(guò)該數(shù)據(jù)來(lái)進(jìn)行模擬計(jì)算。現(xiàn)在用發(fā)動(dòng)機(jī)地面試車(chē)數(shù)據(jù)來(lái)近似計(jì)算發(fā)動(dòng)機(jī)在飛機(jī)起飛飛過(guò)過(guò)程中的噪聲時(shí)域信號(hào)。
發(fā)動(dòng)機(jī)在地面試車(chē)時(shí),在半徑為150 ft(1 ft= 0.304 8 m)的半圓上,與其軸線夾角從20°~160°范圍每隔5°放置一個(gè)麥克風(fēng),來(lái)測(cè)量發(fā)動(dòng)機(jī)在各種轉(zhuǎn)速下該角度的時(shí)域噪聲信號(hào),進(jìn)而計(jì)算出該角度下1/3倍頻程數(shù)據(jù)。麥克風(fēng)擺放位置示意圖如圖5所示,圖5中表示麥克風(fēng)擺放位置與發(fā)動(dòng)機(jī)軸線的夾角。
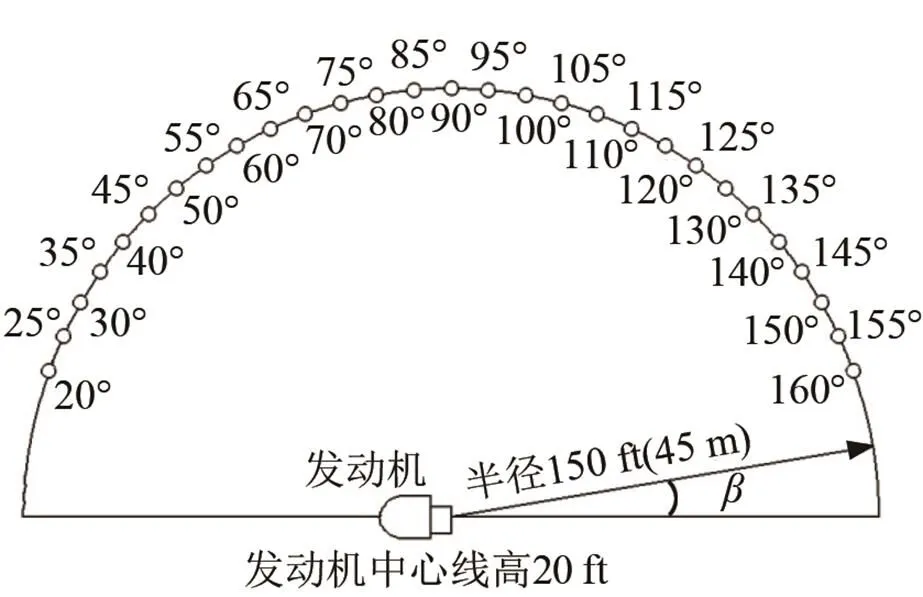
圖5 發(fā)動(dòng)機(jī)地面試車(chē)時(shí)麥克風(fēng)擺放位置
使用地面得到的1/3倍頻程數(shù)據(jù),需進(jìn)行噪聲源的振幅修正(它是指由于噪聲源即飛機(jī)發(fā)動(dòng)機(jī)相對(duì)于觀測(cè)點(diǎn)移動(dòng)的,所以需要進(jìn)行聲壓級(jí)的修正)。用式(14)進(jìn)行修正:

在空中由發(fā)動(dòng)機(jī)和地面飛越噪聲測(cè)量點(diǎn)所在的跑道延長(zhǎng)線組成的平面內(nèi),計(jì)算飛機(jī)發(fā)動(dòng)機(jī)和地面噪聲測(cè)量點(diǎn)之間聲壓信號(hào)傳播的路程和時(shí)間。
計(jì)算出飛機(jī)起飛飛越過(guò)程的航跡數(shù)據(jù)。根據(jù)飛機(jī)在起飛飛越過(guò)程中的航跡數(shù)據(jù),計(jì)算在飛機(jī)飛越過(guò)程的某時(shí)刻,以發(fā)動(dòng)機(jī)為圓心、150 ft為半徑的圓弧的各角度的噪聲時(shí)域信號(hào),用修正后各角度的1/3倍頻程數(shù)據(jù)計(jì)算得到的噪聲時(shí)域數(shù)據(jù)代替。根據(jù)飛機(jī)在飛越過(guò)程中的噪聲計(jì)算理論,計(jì)算該時(shí)刻空中的聲時(shí)域信號(hào)傳遞到地面噪聲測(cè)量點(diǎn)的實(shí)際噪聲時(shí)域信號(hào),從而計(jì)算出飛機(jī)起飛飛越過(guò)程中,地面噪聲測(cè)量點(diǎn)得到的實(shí)際噪聲時(shí)域信號(hào)。
4 飛機(jī)發(fā)動(dòng)機(jī)飛越噪聲計(jì)算實(shí)例
根據(jù)ANP數(shù)據(jù)可計(jì)算某型飛機(jī)的某次標(biāo)準(zhǔn)起飛航跡,表1為某次起飛航跡計(jì)算中的某些參數(shù),其中設(shè)定的功率可以用發(fā)動(dòng)機(jī)低壓轉(zhuǎn)子的實(shí)際轉(zhuǎn)速與最大轉(zhuǎn)速之比的百分?jǐn)?shù)表示。本次計(jì)算中選取該型飛機(jī)某次起飛過(guò)程中的最大起飛功率和最大爬升功率下發(fā)動(dòng)機(jī)的低壓轉(zhuǎn)速,分別為6 100 r·min-1和5 600 r·min-1。用該兩種轉(zhuǎn)速下的發(fā)動(dòng)機(jī)試車(chē)噪聲數(shù)據(jù)來(lái)進(jìn)行計(jì)算,從而模擬出飛機(jī)在飛越過(guò)程中發(fā)動(dòng)機(jī)的噪聲數(shù)據(jù)。
表2、表3分別為與該發(fā)動(dòng)機(jī)同一系列的發(fā)動(dòng)機(jī)在地面試車(chē)時(shí)轉(zhuǎn)速為5 600 r·min-1的1/3倍頻程噪聲數(shù)據(jù)和經(jīng)過(guò)飛行修正后的1/3倍頻程噪聲數(shù)據(jù)。其中第一列為24個(gè)1/3倍頻程的中心頻率,第一行表示麥克風(fēng)擺放位置與發(fā)動(dòng)機(jī)軸線之間的夾角。
現(xiàn)在根據(jù)經(jīng)過(guò)飛行修正的1/3倍頻程數(shù)據(jù)來(lái)近似計(jì)算發(fā)動(dòng)機(jī)在該角度下的時(shí)域噪聲信號(hào)數(shù)據(jù),使用數(shù)字信號(hào)濾波器方法重構(gòu)發(fā)動(dòng)機(jī)的時(shí)域信號(hào)[4]。該方法是通過(guò)設(shè)計(jì)一個(gè)數(shù)字信號(hào)濾波器來(lái)描繪發(fā)動(dòng)機(jī)噪聲的功率譜,然后用這個(gè)濾波器的時(shí)域傳遞函數(shù)與具有隨機(jī)相位的白噪聲做卷積運(yùn)算,從而得到發(fā)動(dòng)機(jī)噪聲的時(shí)域信號(hào)。在隨機(jī)過(guò)程理論中,一個(gè)平穩(wěn)的隨機(jī)過(guò)程的功率譜密度可以用另一個(gè)平穩(wěn)過(guò)程和一個(gè)線性時(shí)不變?yōu)V波器的傳遞函數(shù)表示,表達(dá)式為
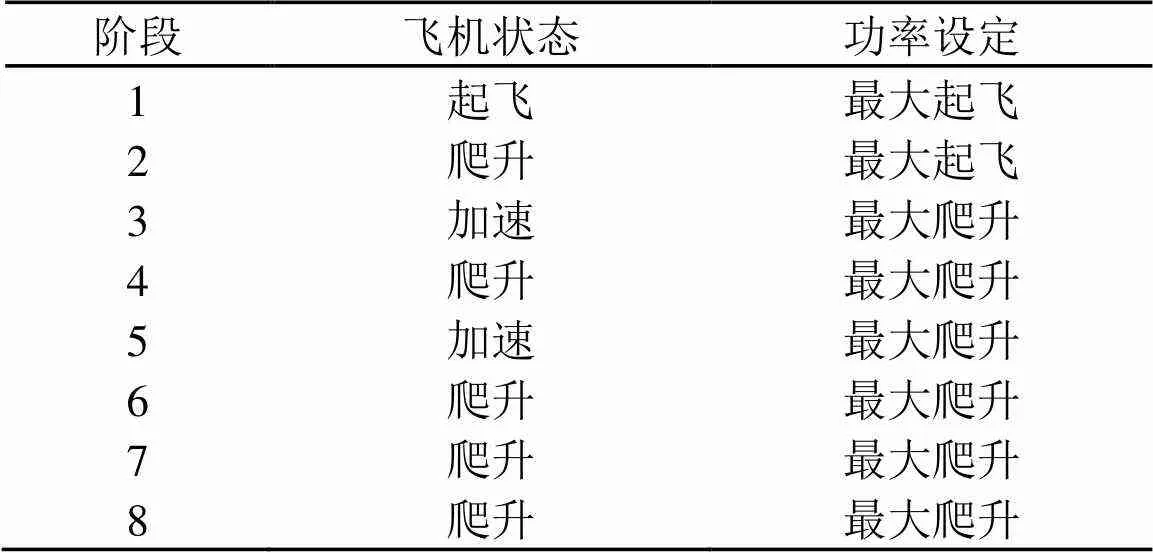
表1 飛機(jī)在起飛飛越的過(guò)程中各階段參數(shù)
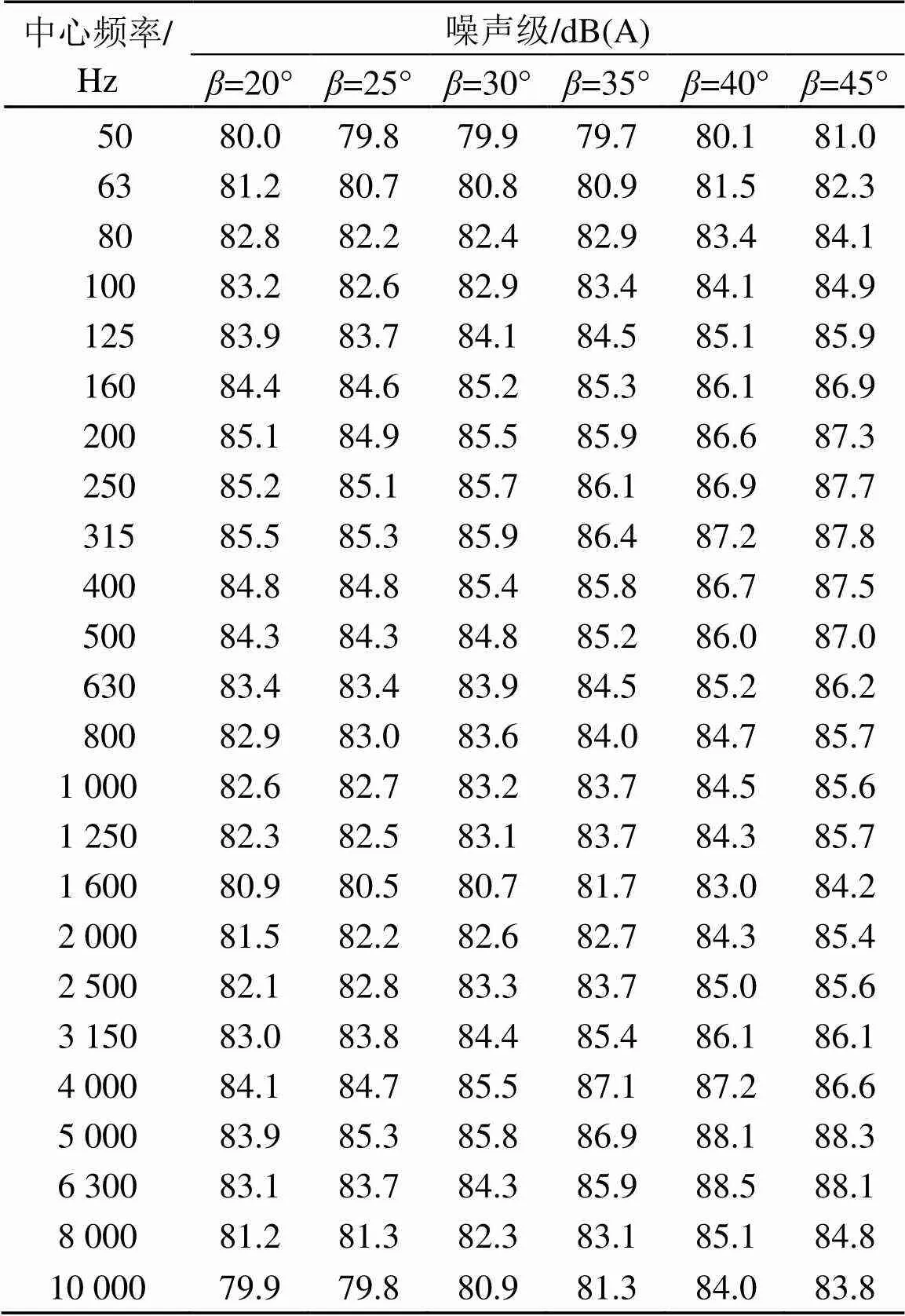
表2 某轉(zhuǎn)速下發(fā)動(dòng)機(jī)地面試車(chē)的1/3倍頻程的噪聲數(shù)據(jù)
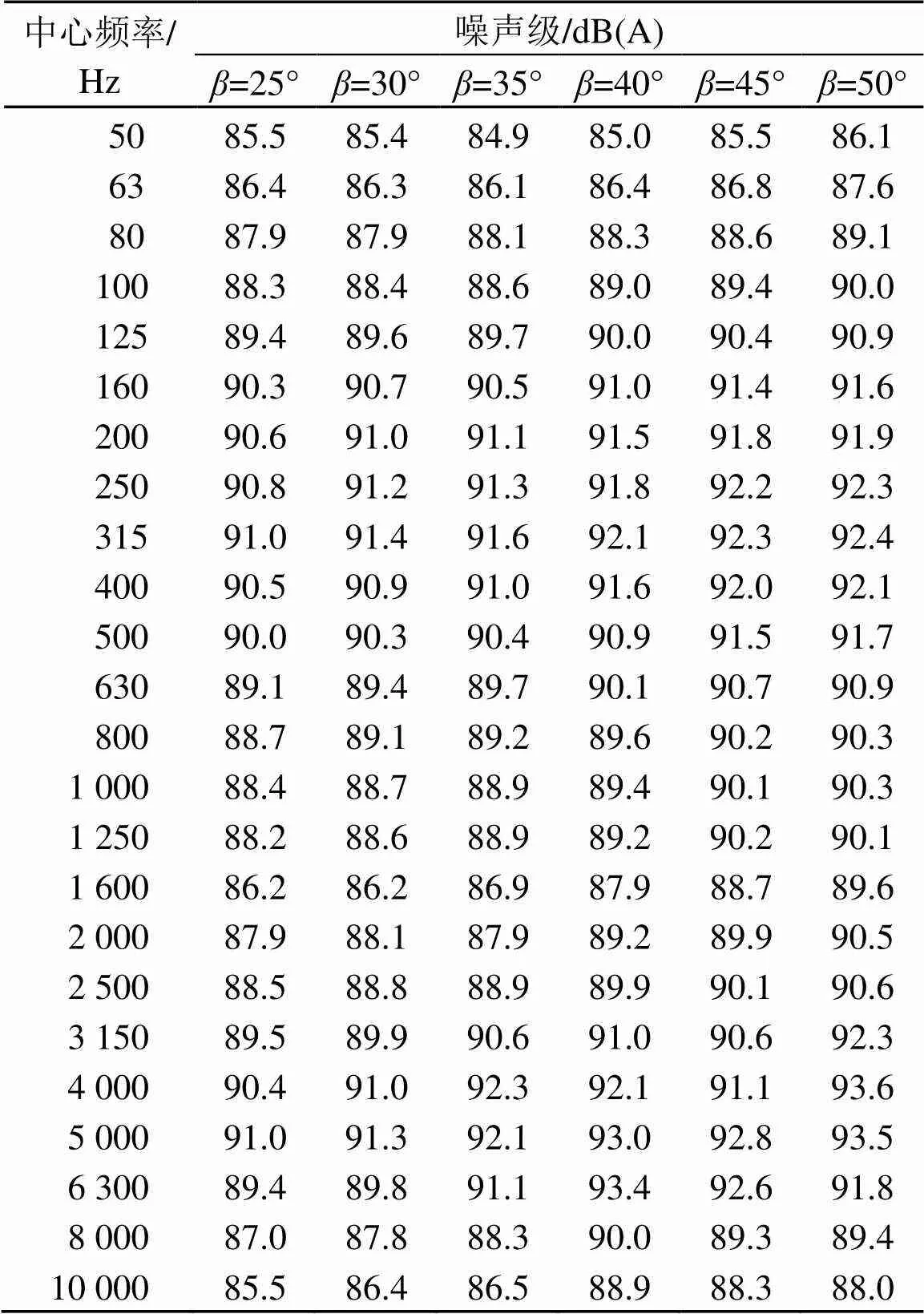
表3 某轉(zhuǎn)速下飛行修正后發(fā)動(dòng)機(jī)1/3倍頻程的噪聲數(shù)據(jù)

上面介紹了發(fā)動(dòng)機(jī)噪聲模擬的方法。現(xiàn)已有的數(shù)據(jù)是1/3倍頻程聲壓級(jí)的數(shù)據(jù),由于傅里葉變換是基于恒定帶寬的,因此首先需要將1/3倍頻程的數(shù)據(jù)修正轉(zhuǎn)換成恒定的頻帶寬度的數(shù)據(jù)[5]。
根據(jù)數(shù)字濾波器的方法對(duì)進(jìn)行過(guò)飛行修正后的1/3倍頻程數(shù)據(jù)修正為恒定帶寬數(shù)據(jù),這里選用參考文獻(xiàn)[6]計(jì)算1/3倍頻程譜的方法進(jìn)行修正,圖6為其計(jì)算1/3倍頻程譜的數(shù)據(jù)流程[6]。
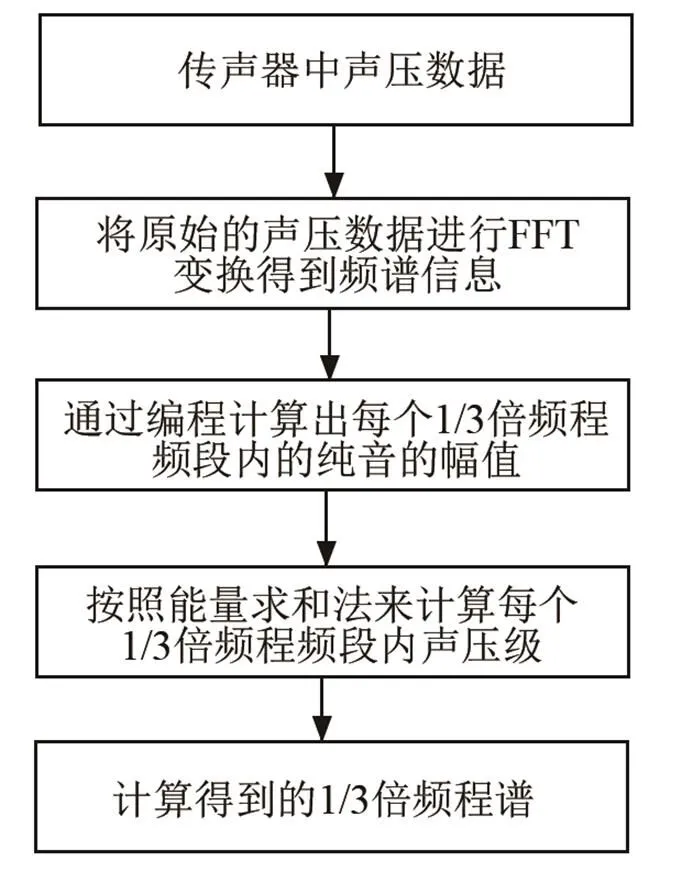
圖6 計(jì)算1/3倍頻程譜的流程圖
該計(jì)算方法的原理為計(jì)算出1/3倍頻程每個(gè)帶寬中的純音,通過(guò)能量求和法計(jì)算該帶寬中的能量。根據(jù)該算法,將帶寬中能量進(jìn)行修正,計(jì)算出作為恒定帶寬的功率譜數(shù)據(jù)。因?yàn)橛邢迒卧獩_擊響應(yīng)濾波器(FIR)的系數(shù)(k)可以用發(fā)動(dòng)機(jī)噪聲功率譜的平方根逆快速傅里葉變換(IFFT)計(jì)算得到。通過(guò)計(jì)算得到的FIR濾波器的系數(shù)(k)與均值為0、方差為1的白噪聲做卷積后,可以得到該1/3倍頻程數(shù)據(jù)對(duì)應(yīng)的噪聲時(shí)域信號(hào),從而計(jì)算出時(shí)域噪聲的最大聲壓。因?yàn)樵摲椒ㄓ?jì)算得到的噪聲時(shí)域信號(hào)與選定的恒定帶寬寬度有關(guān),故該方法計(jì)算有一定的誤差。
根據(jù)數(shù)字濾波器的方法,計(jì)算得到經(jīng)過(guò)飛行修正后發(fā)動(dòng)機(jī)噪聲時(shí)域信號(hào)的聲壓數(shù)據(jù),每個(gè)角度下發(fā)動(dòng)機(jī)噪聲的最大聲壓值如表4所示。
根據(jù)兩個(gè)角度之間的聲壓差值來(lái)線性估計(jì)每隔1°的發(fā)動(dòng)機(jī)最大聲壓值數(shù)據(jù)。根據(jù)NASA的報(bào)告,現(xiàn)在假定飛機(jī)發(fā)動(dòng)機(jī)的噪聲時(shí)域信號(hào)的周期為0.04 s,使用以下函數(shù)來(lái)模擬發(fā)動(dòng)機(jī)在空中與其相距150 ft處產(chǎn)生的時(shí)域信號(hào),具體計(jì)算公式為

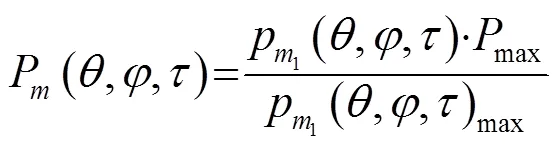
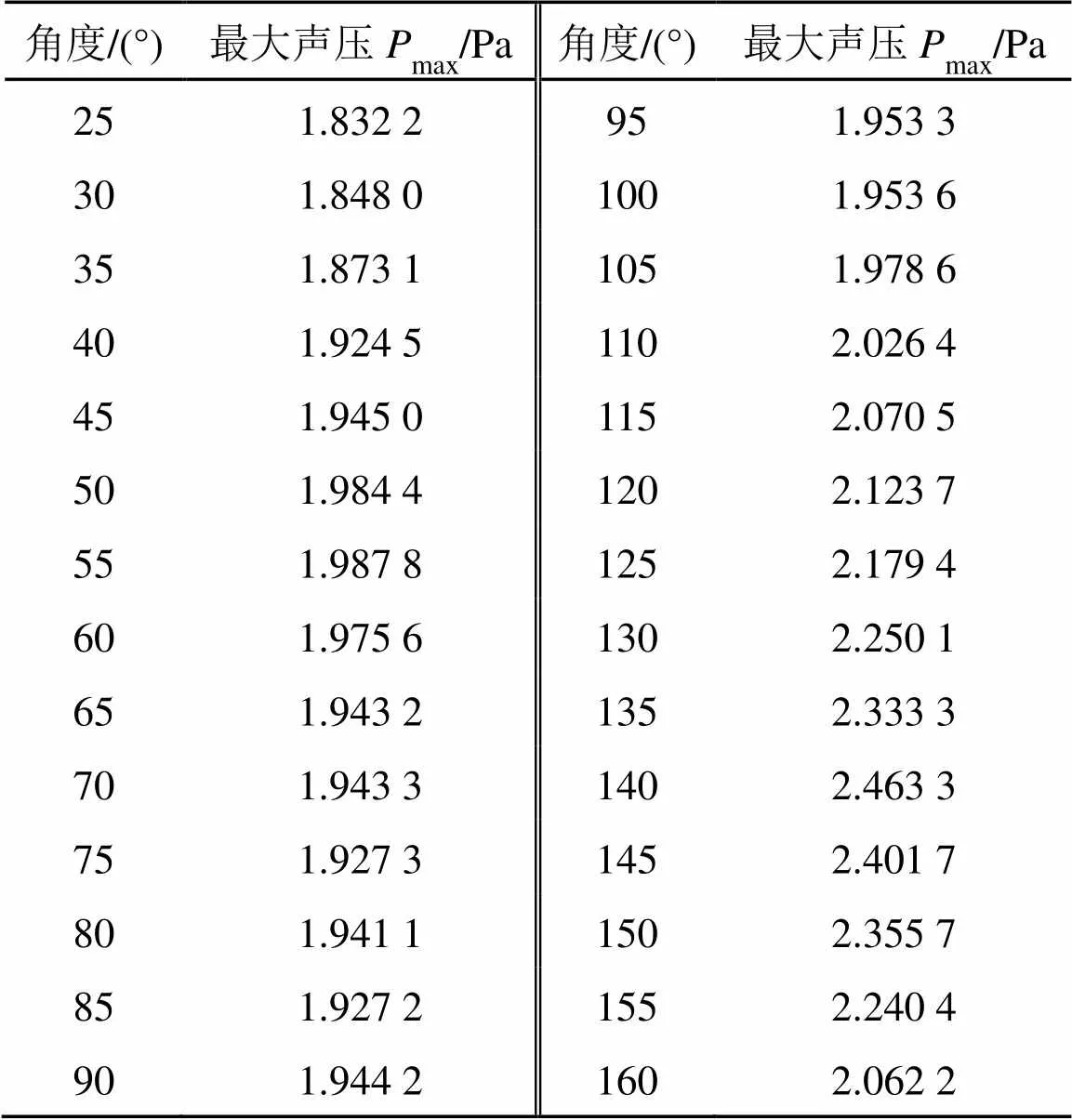
表4 發(fā)動(dòng)機(jī)地面試車(chē)中各角度對(duì)應(yīng)的最大聲壓值
根據(jù)ANP數(shù)據(jù)庫(kù)中關(guān)于某型飛機(jī)起飛的各種參數(shù)和數(shù)據(jù),可以計(jì)算出該型飛機(jī)的某個(gè)標(biāo)準(zhǔn)起飛航跡[7]。該型飛機(jī)起飛的重量為83 520 lb(1 lb = 0.453 6 kg),該起飛重量與我們使用的地面試車(chē)發(fā)動(dòng)機(jī)的數(shù)據(jù)對(duì)應(yīng)的飛機(jī)起飛重量相同。飛機(jī)航跡圖計(jì)算結(jié)果如圖7所示。
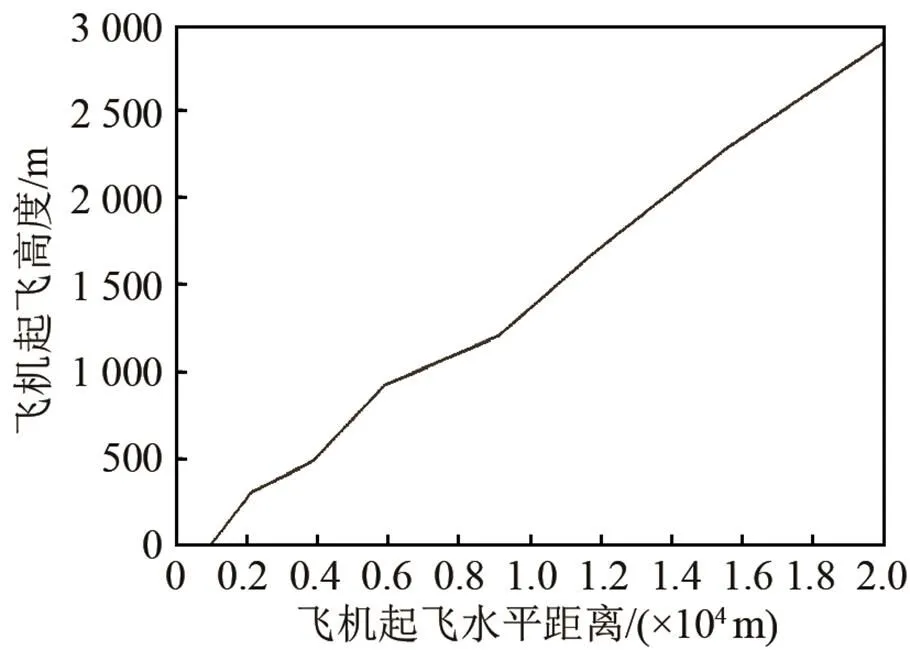
圖7 某型飛機(jī)某次起飛飛越航跡圖
在飛機(jī)起飛飛越噪聲測(cè)量中,飛越噪聲測(cè)量點(diǎn)位于跑道中心線延長(zhǎng)線上,與飛機(jī)起飛滑跑點(diǎn)之間的距離為6 500 m,在該測(cè)量點(diǎn)上放置麥克風(fēng)來(lái)測(cè)量飛機(jī)起飛飛越過(guò)程中的時(shí)域噪聲數(shù)據(jù),進(jìn)而計(jì)算出飛機(jī)飛越有效感覺(jué)噪聲級(jí)。飛機(jī)在起飛飛越過(guò)程中,一般認(rèn)為飛機(jī)在起飛飛越過(guò)程中,除了飛機(jī)在剛離開(kāi)地面起飛狀態(tài)外,飛機(jī)沿固定的角度進(jìn)行爬升,所以認(rèn)為飛機(jī)在爬升和加速時(shí),飛機(jī)的飛行速度方向與飛機(jī)的航跡方向相同,即認(rèn)為飛機(jī)某時(shí)刻速度與水平方向的夾角與該時(shí)刻所在階段的航跡與水平方向的夾角相同。
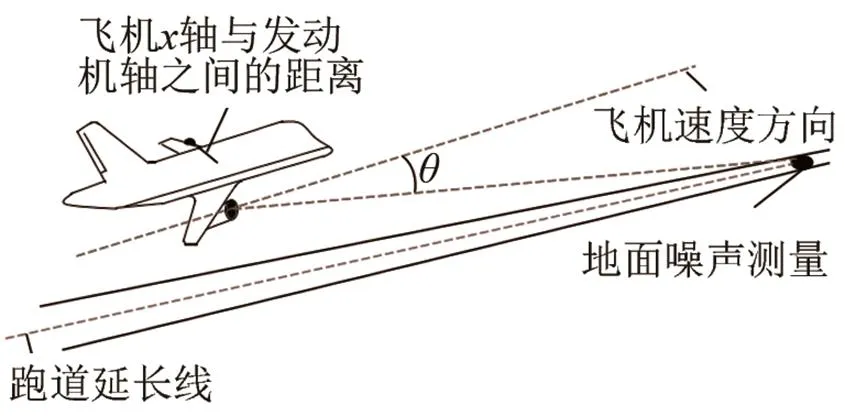
圖8 飛機(jī)速度方向與地面噪聲測(cè)量點(diǎn)的所夾角度示意圖
根據(jù)發(fā)動(dòng)機(jī)軸線與飛機(jī)軸線之間的垂直距離、飛機(jī)在某時(shí)刻跑道延長(zhǎng)線豎直上平面內(nèi)的坐標(biāo)位置(,)和跑道延長(zhǎng)線上噪聲測(cè)量點(diǎn)(6 500,0)的位置,來(lái)計(jì)算某時(shí)刻飛機(jī)發(fā)動(dòng)機(jī)速度方向與地面噪聲測(cè)量點(diǎn)之間的夾角(如圖8中所示)和聲波的傳遞路徑。


圖9為模擬計(jì)算得到的第一個(gè)0.5 s內(nèi),地面接收點(diǎn)接收到的噪聲時(shí)域信號(hào)。
圖10中橫縱坐標(biāo)分別為地面噪聲測(cè)量點(diǎn)接收的信號(hào)時(shí)間和聲壓。地面噪聲測(cè)量點(diǎn)從飛機(jī)起飛離開(kāi)地面開(kāi)始計(jì)時(shí),發(fā)動(dòng)機(jī)軸線與該時(shí)刻聲線的夾角在20°~160°之間計(jì)算地面噪聲測(cè)量點(diǎn)得到的噪聲時(shí)域信號(hào)。因?yàn)楸敬斡?jì)算中每個(gè)0.5 s的時(shí)間內(nèi)等間隔取12 000個(gè)聲壓值,所以在圖10中顯示的數(shù)據(jù)較多,為連續(xù)的聲波波形分布。
根據(jù)預(yù)測(cè)的飛越噪聲時(shí)域信號(hào),按照CCAR36部規(guī)章規(guī)定的計(jì)算方法[7],在每個(gè)0.5 s的時(shí)間段上,計(jì)算出24個(gè)1/3倍頻程內(nèi)的瞬時(shí)聲壓級(jí),最終可以得到有效感覺(jué)噪聲級(jí)。
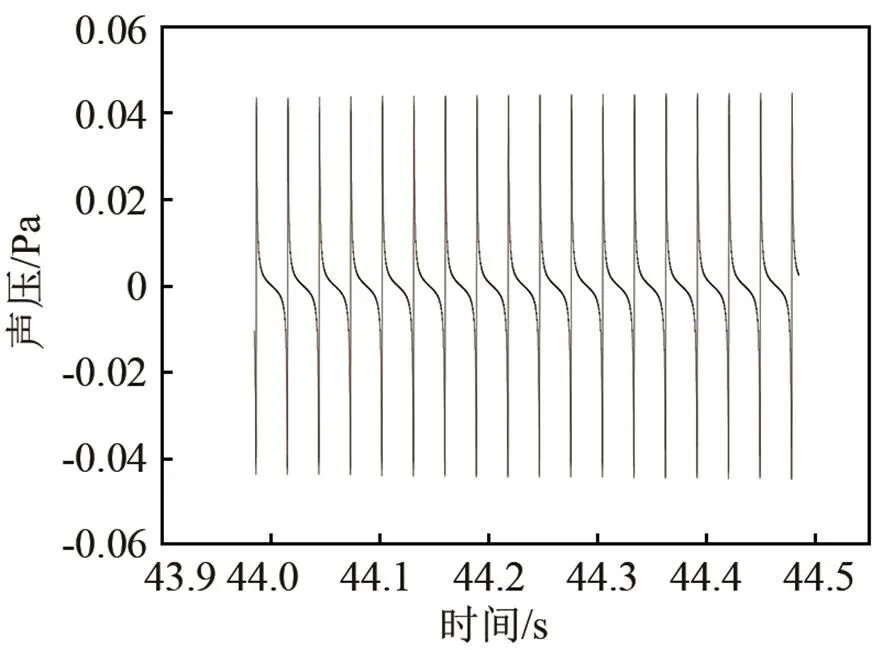
圖9 模擬計(jì)算得到的第一個(gè)0.5 s內(nèi)的噪聲時(shí)域信號(hào)
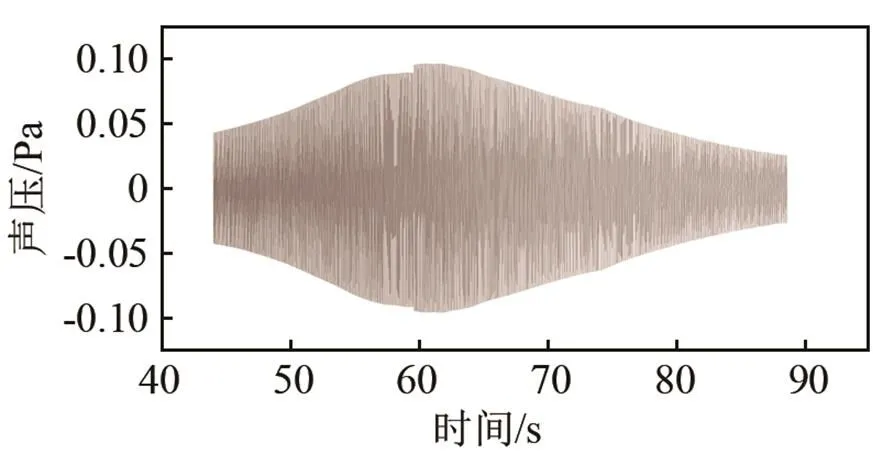
圖10 計(jì)算得到的地面噪聲測(cè)量點(diǎn)接收的發(fā)動(dòng)機(jī)時(shí)域噪聲信號(hào)
5 結(jié)論
本文通過(guò)研究飛機(jī)噪聲信號(hào)傳播特性的計(jì)算方法,使用發(fā)動(dòng)機(jī)地面試車(chē)數(shù)據(jù),近似計(jì)算了飛機(jī)發(fā)動(dòng)機(jī)在起飛飛越過(guò)程中地面噪聲測(cè)量點(diǎn)接收的部分噪聲時(shí)域信號(hào)數(shù)據(jù),對(duì)進(jìn)一步研究發(fā)動(dòng)機(jī)噪聲對(duì)飛機(jī)適航噪聲測(cè)量結(jié)果的影響有一定理論意義。如果能收集到地面發(fā)動(dòng)機(jī)噪聲測(cè)量的時(shí)域信號(hào)數(shù)據(jù),并通過(guò)修正換算到發(fā)動(dòng)機(jī)空中噪聲的時(shí)域數(shù)據(jù),則通過(guò)該方法能獲得更加準(zhǔn)確的發(fā)動(dòng)機(jī)飛越噪聲的時(shí)域數(shù)據(jù),由該數(shù)據(jù)可以計(jì)算出發(fā)動(dòng)機(jī)在起飛飛越過(guò)程中的有效感覺(jué)噪聲級(jí)。根據(jù)發(fā)動(dòng)機(jī)和飛機(jī)的噪聲時(shí)域數(shù)據(jù)和有效感覺(jué)噪聲級(jí)數(shù)據(jù),更加準(zhǔn)確地研究發(fā)動(dòng)機(jī)噪聲對(duì)飛機(jī)起飛飛越過(guò)程中的噪聲適航審定的影響。
1] Jeffrey J. Kelly. Sigal Processing of Aircraft Flyover Noise[R]. Virginia.NASA. 1991.
[2] 陳聃. 風(fēng)場(chǎng)和溫度場(chǎng)下影響下的空氣中聲波傳播的特性研究[D]. 長(zhǎng)沙: 國(guó)防科技大學(xué), 2009: 22-25.
CHEN Dan. The study of sound wave propagation characteristics under the influence of wind and temperature field in the air[D]. Changsha: National University of Defense Technology, 2009: 22-25.
[3] 姜薇, 李太寶. 三維聲線追蹤的正三棱錐前向伸展算法[J]. 聲學(xué)學(xué)報(bào), 2005, 30(5): 405-408.
JIANG Wei, LI Taibao. A three-dimensional sound ray tracing method by deploying regular tetrahedrons[J]. Acta Acustica, 2005, 30(5): 405-408.
[4] SHIN H C, HALL C, CRICHTON D. Auralisation of turbofan engine noise components[C]//12th AIAA/CEAS Aeroacoustics Conference, Cambridge, Massachusetts, 2006.
[5] 金宗亮. 航空發(fā)動(dòng)機(jī)噴氣噪聲分解方法研究[D]. 天津: 中國(guó)民航大學(xué), 2014: 29-32.
JIN Zongliang. Research on methods to separate jet noise from engine noise[D]. Tianjin: Civil Aviation University of China, 2014: 29-32.
[6] 張攀登, 高志強(qiáng). 噪聲1/3倍頻程計(jì)權(quán)聲級(jí)算法[J]. 河南理工大學(xué)學(xué)報(bào)(自然科學(xué)版), 2013, 32(6):709-712.
ZHANG Pandeng, GAO Zhiqiang. Study of 1/3 octave spectrum and weighted sound level[J]. Journal of Henan Polytechnic University(Natural Science), 2013, 32(6):709-712.
[7] 張鳳, 閆國(guó)華. 飛機(jī)起飛航跡計(jì)算方法研究[J]. 裝備與制造技術(shù), 2011(11): 15-16.
ZHANG Fen, YAN Guohua. Research on Aircraft Track Calculation Method[J]. Equipment and manufacturing technology, 2011(11): 15-16.
[8] 中國(guó)民用航空局. 航空器型號(hào)和適航合格審定噪聲規(guī)定, 附件B-根據(jù)第36. 103條運(yùn)輸類(lèi)和噴氣式飛機(jī)的噪聲[S]. 北京: 中國(guó)民用航空局, 2007.
CAAC. Aircraft types and airworthiness approval of qualified noise regulations, Annex B- According to the article 36.103 of the transportation and the noise of jet planes[S]. Beijing: CAAC, 2007.
Research on signal prediction method of fly-over airworthiness noise in time domain
YAN Guo-hua, BAI Wei-wei
(Civil Aviation University of China, Tianjin 300300, China)
In the past, the prediction of the effective perceived engine noise level is calculated by one-third octave spectrum, and there are relatively few studies of using the engine noise data in time-domain to do so. This paper studies the method of calculating the noise propagation characteristics during the aircraft take-off and fly-over. The method is used to simulate the engine noise data in time-domain, which are received at the ground fly-over noise measurement point during aircraft take-off and fly-over. The flight path of the aircraft during take-off and fly-over is calculated according to ANP database data. And the sound ray method is used to calculate the travel distance and time of the noise signal at a certain moment. The maximum sound pressure value of the noise signal at this moment is determined according to the angle between the aircraft engine axis (i.e. the aircraft velocity direction) and the ground noise measurement point. Finally, the time-domain engine noise data in part time of aircraft take-off and fly-over are obtained at the ground noise measurement point, which provides a theoretical basis for airworthiness validation of aircraft noise.
flyover; noise of engine; time-domain signal
TB53
A
1000-3630(2018)-06-0589-07
10.16300/j.cnki.1000-3630.2018.06.014
2017-11-27;
2017-12-28
閆國(guó)華(1964-), 男, 陜西韓城人, 博士, 研究方向?yàn)轱w機(jī)噪聲適航與排放。
白偉偉, E-mail: m13672127100@163.com
猜你喜歡
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2018年11期)2018-08-04 03:25:42
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01
