船載水聲定位系統自動校準技術研究
2019-01-10 10:04:48張慶國匡彪要慶生連莉
聲學技術 2018年6期
關鍵詞:方法
張慶國,匡彪,要慶生,連莉
?
船載水聲定位系統自動校準技術研究
張慶國,匡彪,要慶生,連莉
(昆明船舶設備研究試驗中心,云南昆明 650051)
在分析常規水聲定位系統校準方法的基礎上,結合某型船載水聲定位系統的工程研制,提出了一種自動校準方法。該方法無需常規的動態或靜態校準,可在每次系統安裝完成后自動檢測及校準。利用基陣中心位置的發射換能器以及船只固定連接桿入水端的發射換能器依次發射校準聲信號,將獲得的水聲定位坐標與上述兩個發射換能器固定對應的全球定位系統(Global Positioning System, GPS)天線坐標進行平移和偏轉,獲得偏移參數矩陣,實現系統校準。某水域的跑船試驗驗證結果表明,利用該自動校準方法可在兩分鐘內完成全部自檢及校準工作,并且水聲定位軌跡與跑船GPS軌跡重合較好,具有校準效率高、測量精度高等優點。
船載系統;水聲定位系統;自動校準方法
0 引言
船載水聲定位系統不受試驗水域和具體水下地理環境的限制,具有較好的靈活性和便捷性,在水下目標定位跟蹤及導航領域得到了廣泛應用[1-2]。當前船載水聲定位系統,多采用超短基線和短基線形式[1]。利用水聲定位原理,實時獲得水下目標相對于船載基陣的位置信息,再結合船只當前的全球定位系統(Global Positioning System, GPS)/北斗定位系統的定位信息,以及船載基陣的姿態等相關信息進行坐標轉換獲得水下目標的絕對坐標信息;利用水聲通信原理實現水下目標的遙測、遙控以及水下導航等功能。
由于船載式水聲定位系統存在基陣坐標系、船只坐標系、大地坐標系等多個坐標系的轉換[2-3],其水聲定位導航的精度直接與坐標系的轉換相關。因此,船載水聲定位系統在安裝完成后,需要進行校準,獲得不同坐標系之間的坐標偏移參數,經過修正后才能實現水聲定位及導航等功能,才能確保其定位與導航精度。
常規需重新安裝的水聲定位系統無論是采用動態還是靜態校準方式,均存在校準工作量較大、經濟性差、準備時間過長等不足。雖然國內外進行了多種方法的研究和測試,在動態校準的基礎上提出了靜態校準的實施方法,但均需要人工跑船或靜態吊放聲源進行比對校準。特別是在需要反復拆裝船載基陣的工程應用上,每次船載基陣安裝后均需進行適應性校準,試驗效率較低,且用戶使用成本較高。如能研制一種無需人工校準的船載水聲定位系統,將大大提高工作效率,降低人工操作的復雜度,提高用戶滿意度。
1 船載水聲定位系統
船載式水聲定位跟蹤系統[4]主要由濕端設備、信號處理設備、信標等三部分組成。其中濕端設備包括聲學基陣(船載短基線陣,由5元組合換能器構成)、水密電子艙、電子組件等設備;信號處理設備包括模擬信號處理、數字信號處理、數據處理顯控、航姿測量、系統供電等設備;信標安裝在水下目標上,為系統提供定位信標信號,由信號產生組件、功放組件、組合換能器和內置電池等組成。系統工作示意圖如圖1所示。
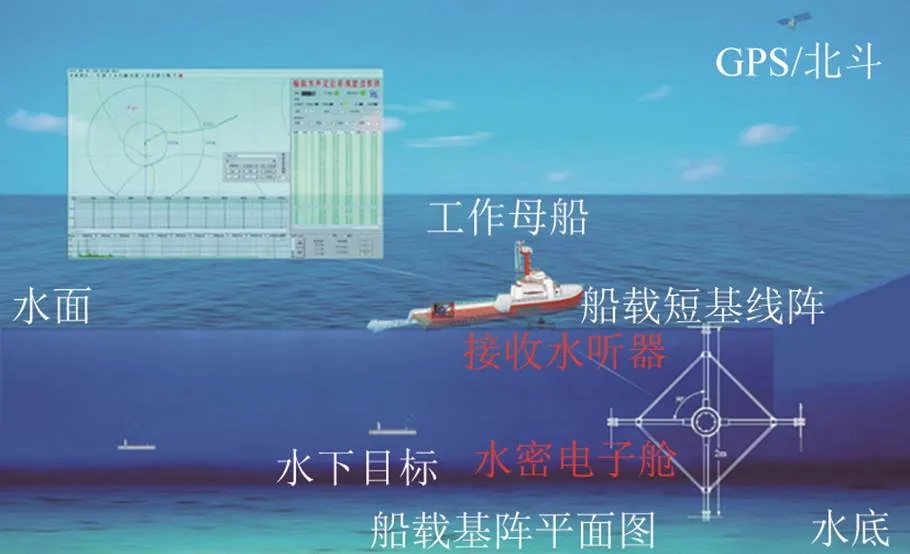
圖1 船載水聲定位跟蹤系統示意圖
如圖1所示,船載短基線陣通過工作母船上的開放式水槽進行布放,利用剛性連接桿與基陣固定連接。船載基陣上陣元共5個,分別布放在十字陣的四個端點和中心點。受現場水槽功能復用要求的限制,需要每次使用時進行基陣的現場安裝,使用完后拆除。因此,與常規船載短基線水聲跟蹤系統相比較,本系統主要特點是船載基陣需要反復拆裝,并且是非固定方向的隨機安裝方式。由于每次安裝的基陣方向不同,必須進行每次安裝后船載基陣的現場校準。
船載水下十字型基陣(如圖1所示)布設時對其方位無嚴格要求,但需要獲知布放完成后的基陣與船只航向角之間的夾角。理論上基陣坐標系與船只坐標系一致是最為理想的情況,但實際施工時無法做到,并且本項目中要求船載基陣安裝方式為“盲連接”方案,不強制要求基陣與船只的坐標系一致,以便于現場的快速安裝與固定。因此,必須考慮船載基陣每次重新安裝后的現場校準(主要是獲得基陣方向與船只航向之間的夾角)。如果不進行校準,無法后期修正十字基陣與船只縱橫方向之間的夾角,將會導致水下目標的位置信息出現偏轉,例如,本應該在船頭方向卻被錯誤定位成船尾或船舷等其他方向。
由此可見,系統現場校準是必須的。但如果每次使用時均按照船載水聲定位系統常規方法進行校準,存在準備時間長、經濟性差,且工作效率不高等不足。另外,由于機械結構的加工工藝限制,每次安裝的基陣坐標系與船只坐標系的偏差也不盡相同,如不進行試驗前校準,將對水聲定位精度造成較大的影響,甚至無法準確實現水下目標的定位與導航等功能。
本系統采用同步式短基線水聲定位原理[4],利用船載短基線陣實時接收水下目標上發出的同步脈沖信號,經過解算獲得基陣上每個水聽器接收到的聲信號傳輸時延值,利用球面交匯原理獲得水下目標的位置信息;實時融合外部設備(如GPS/北斗、航向、航姿等)信息,進行相應坐標轉換,即可獲得水下目標的大地位置信息,完成實時水聲定位跟蹤與導航。
2 常規校準方法
船載水聲定位跟蹤系統通常采用“動態”或“靜態”方式進行系統校準,基本原理是利用已知大地坐標點位同時發射聲信號,船載水聲定位系統進行水聲定位。將多個不同點位(通常需要覆蓋四個象限)的大地坐標與水聲定位坐標進行比對,獲得基陣的偏移與旋轉參數矩陣,確保水聲定位精度。
“動態”校準需要船只按照規劃航路進行航行,利用在基陣不同方位上的多個測量點進行測量,將水聲測量數據與GPS/北斗測量數據進行比對分析,結合最小誤差原理獲得校準參數[5]。典型校準方案如圖2所示,其中圖2(a)為載有水聲定位系統的工作母船,圍繞沉底的校準聲源進行動態校準;圖2(b)為工作母船停航或拋錨,而校準船只攜帶聲源圍繞工作母船進行動態校準。
“靜態”校準與上述“動態”校準基本原理相同,利用在工作母船船舷吊放若干個應答器(聲源),同時獲得應答器船只坐標及水聲定位相對于船載基陣的坐標,經過處理即可得到坐標系之間的夾角[2],實現水聲定位系統的現場校準。
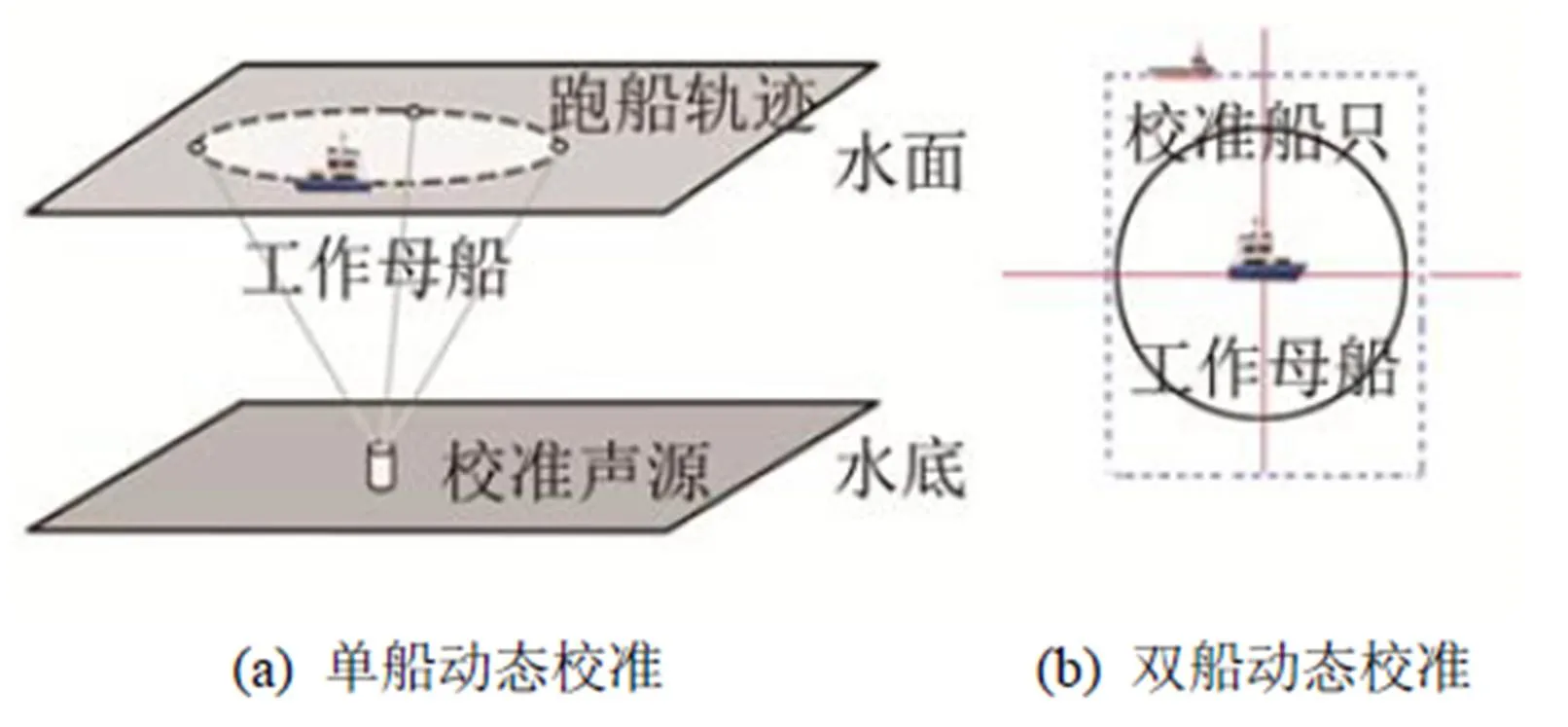
圖2 常規動態校準方法示意圖
綜上所述,無論是“動態”還是“靜態”校準均需要大量人工操作,需要攜帶聲源進行航路規劃,或在船舷附近吊放若干個聲源。存在校準時間長,甚至需要多條船只配合才能完成,經濟性及工作效率均不佳,更為重要的是對需要反復拆裝的船載水聲定位系統來講,幾乎難以實現。
3 自動校準方法
由于本船載式水聲定位系統需要在工作母船上隨時安裝使用,任務完成后即拆除。因此,為便于使用必須采用自動校準方法。為了更好地說明自動校準方法,將船載水聲定位系統的安裝條件說明如下:
(1) 基陣通過船只固定位置的直通水槽進行安裝布放,并且基陣與船只采用剛性連接桿進行固定連接;
(2) 每次使用時進行基陣的現場安裝布放,使用完成后拆除基陣,將水槽留給其他設備使用,但每次安裝的連接桿點位固定;
(3) 基陣每個陣元的高度由機械結構設計保證,確保多個陣元處于同一水平面,或高度差固定且可試前測量獲得,為已知量;
(4) 基陣與連接桿之間的安裝結構,具有單向卡槽防差錯機構,可確保基陣坐標系與船只坐標系的夾角在較小范圍內(夾角<5°)。基陣與船只連接桿一旦固定完成,其夾角便為固定值(忽略航行過程中機械結構的微小形變),該夾角()為未知量;
(5) 基陣中心位置以及基陣固定的連接桿上(入水端)均安裝有發射換能器(兩個發射換能器),用于發射校準聲信號;
(6) 船只絕對位置信息及航姿信息的獲取集成在一套GPS雙天線測量設備中,分別對應(5)中的兩個發射換能器;
(7) 基陣內部安裝有高精度姿態傳感器,可實時獲得船載基陣的姿態信息,并將其作為當前時刻的姿態參數參與水聲定位解算。
船載水聲定位系統基陣的具體安裝示意圖如圖3所示。
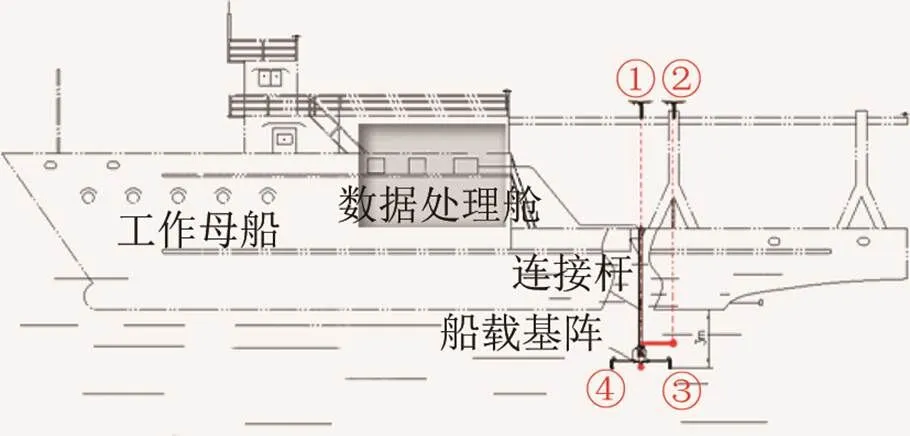
圖3 智能化船載水聲定位跟蹤系統安裝示意圖
圖3中①、②分別為GPS雙天線測量設備的兩根天線,③為上述連接桿入水端上固定連接的發射換能器,④為上述基陣中心位置的發射換能器。本智能化方法的關鍵設計點如下:
(1) ①和④對應且在同一垂線上(或安裝偏差固定可測量),由機械結構設計和安裝結構保證;
(2) ③固定連接(通常為焊接)在連接桿入水端,并且③與②在同一垂線上(或安裝偏差固定可測量);
(3) 數據處理艙(如圖3所示)內的信號處理設備可實時獲得①和②兩點的GPS位置信息,同時可控制③和④的發射換能器進行校準聲信號的依次發射與停止;
(4) 基陣上的每個陣元均由收發合置的換能器組成,可受控進行發射或接收。
實際上,圖3中①、②處的GPS天線為船載固定裝置,在試驗后不進行拆除,而③亦為船載套管(船載基陣的連接桿穿過套管)上固定安裝的設備,需要①和④為對應在同一垂線上,③與②在同一垂線上,或者兩者之間的垂直偏差可測量修正,也就是說需要①和④、③與②在同一垂線上或偏差量可測。如果垂直對應的偏差量沒有進行修正,將直接影響水聲定位精度。假設③與②垂線上位置偏差為0.1 m,垂直高度假設為8 m,其夾角為arctan(0.1/8)≈0.7°。航向角偏差近似為0.7°,在距離為2 000 m的情況下,由此夾角帶來的水聲定位誤差為2 000tan(0.7)≈25 m。
另外,上述方案考慮了船載基陣在航行狀態下的實際情況。本方案的船載基陣(安裝完成后)和GPS天線等參考點均與試驗船只剛性固定連接,在不考慮剛性連接形變的基礎上,重新安裝后的船載基陣與船只之間的夾角可自動計算出,以供在后續定位算法中進行修正。由于在風浪情況下,船只、基陣、GPS天線之間的相對位置是固定的,所以本校準方法可獲得相對夾角,以保證水聲定位精度。
智能化船載水聲定位系統的流程圖如圖4所示。其主要工作流程是:基陣完成布放后,數據處理艙內的顯控軟件(用戶界面)自動進行入水監測,如基陣入水則進行自校準,否則在軟件界面上進行信息提示;然后利用基陣上的多個收發合置換能器依次發射校準聲信號,顯控軟件獲得陣元間距;之后控制③和④依次進行校準聲信號發射,同時融合當前時刻①和②兩點的GPS位置信息,分別獲得基陣坐標系與船只坐標系的偏移量(,)和旋轉偏角();最后代入基陣內部的姿態相關信息[6],進行綜合處理計算,最終獲得水下目標的精確定位信息。
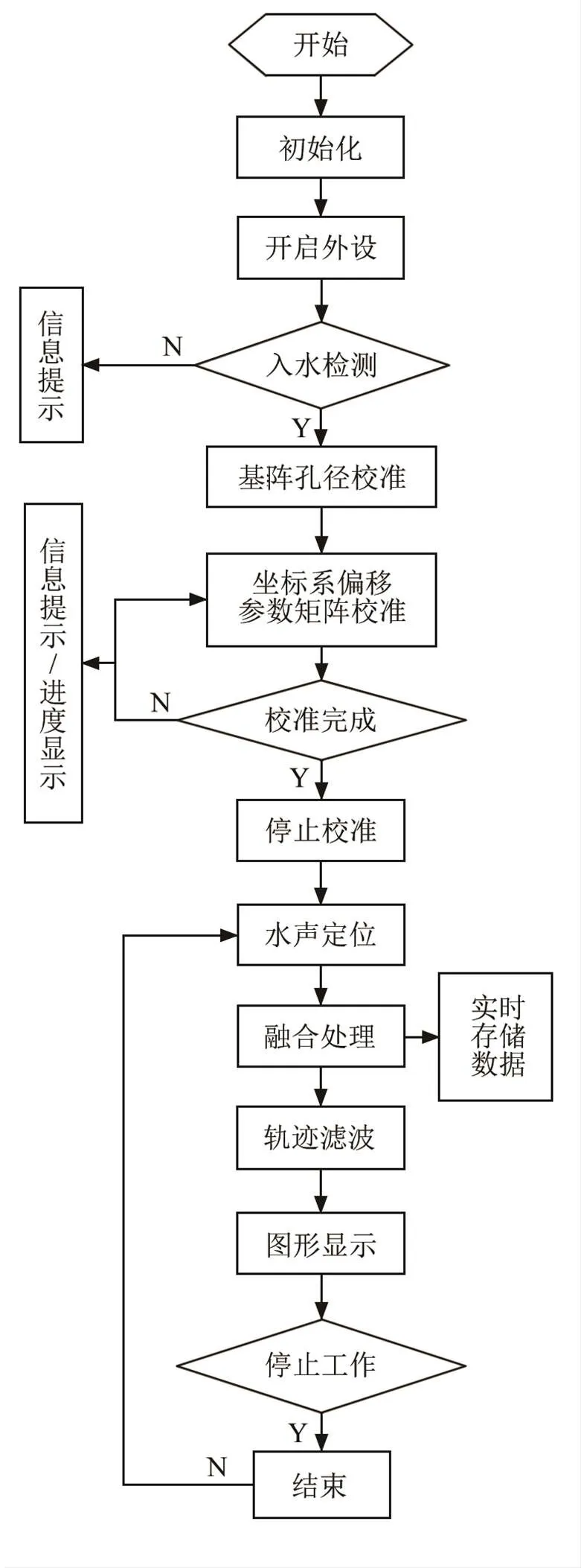
圖4 船載水聲定位系統自動校準流程圖
4 實航試驗
船載基陣為5元十字陣,與工作母船采用剛性連接桿進行固定連接,實物如圖5所示。基陣孔徑為2 m,鋁合金結構。由于受到風浪及涌流的影響,基陣孔徑發生變化,而且基陣平面也會發生變化。根據常規誤差分析可知,由基陣孔徑的形變帶來的水聲定位誤差為×(?/),假設為2 000 m,為2 m,?為0.002 m,則由基陣形變帶來的誤差即為2 m。因此,為了提高水聲定位系統的定位精度,需要對當前的基陣孔徑進行自動校準修正,進一步降低系統誤差。另外,除了試驗船只航行受海況影響外,本校準方法對海況無特殊要求。
在國內某水域進行試驗測試,船載水聲定位系統安裝完成后,約兩分鐘即完成自動校準工作進入定位跟蹤狀態。

圖5 船載基陣實物圖
利用試驗船只吊放聲源(聲源上對應有全球差分定位系統(Differential Global Positioning System, DGPS)天線)的方式,采用動態跑船方法對系統定位功能和精度進行驗證,其實際航行試驗定位跟蹤結果如圖6所示。
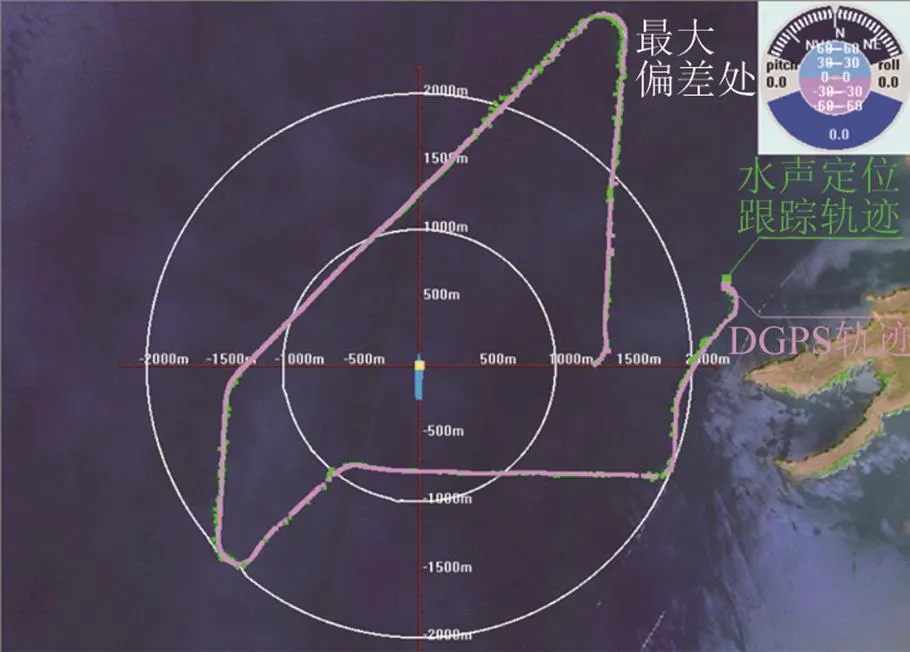
圖6 水聲定位系統和GPS在某水域跑船試驗定位跟蹤軌跡對比圖
圖6中有兩條軌跡,分別為水聲定位系統實時記錄的水下目標位置信息,以及跑船試驗的船只GPS軌跡。由于GPS與聲源處于同一垂直面上,理論上這兩條軌跡應該重合。因此,通常以GPS軌跡為基準來判斷水聲定位的總體精度。
圖6中的湖上試驗為在約2~3級湖況下的實際航行試驗,證明本方法在一定風浪情況下可使用,并保證其水聲定位精度。由圖6可見,經過校準后的水聲定位誤差由67.5 m縮減至12.5 m。
由圖6可知,試驗船只的DGPS軌跡和水聲定位軌跡重合度較好,以圖6最遠處(標注為“最大偏差處”)為例,實際經校準的水聲定位偏差為12.5 m,遠小于常規的定位偏差67.5 m。因此,實際航行試驗證明了經過自動校準的船載水聲定位系統具備較高的定位精度,并且校準效率高,具有較高的工程應用價值。
5 結論
本文在水聲定位系統常規校準方法的基礎上,利用與船只固定連接的多元組合式短基線陣,以及連接桿上的發射換能器,結合對應的GPS雙天線測量設備,提出一種船載水聲定位系統自動校準方法。該方法無需試前人工校準,具有使用效率高、人工操作簡單、智能化程度高,且對現場安裝精度要求不高等優點。目前,該系統已經在某工程項目上得到成功應用。
該方法具有廣泛的適應性,不僅適應于船載式機動性強的水聲定位系統,又可應用于其他水聲定位系統,經過擴展和改進還可應用在相類似的海洋工程上,具有較高的工程實用價值。
[1] 田坦. 水下定位與導航技術[M]. 北京: 國防工業出版社, 2007: 67-68. TIAN T.Underwater positioning and navigation technology[M]. Beijing: National Defence Industry Press, 2007: 67-68.
[2] 王坤石. 一種超短基線水聲定位系統的靜態校準方法: 中國, CN105652262A[P]. 2016-06-08. WANG Kunshi. A static calibration method for ultra short baseline underwater acoustic positioning system: China, CN105652262 A [P]. 2016-06-08.
[3] 劉百峰, 羅坤. 一種船載水聲定位系統標定方法研究[J]. 艦船科學技術, 2015, 37(11): 108-110. LIU Baifeng, LUO Kun. Research on calibration method of Shipborne underwater acoustic positioning system[J]. Ship Science and Technology, 2015, 37(11): 108-110.
[4] 張慶國, 王健培. 船載式水聲跟蹤系統定位原理及誤差分析[J]. 現代電子技術, 2013, 23(1): 70-73. ZHANG Qingguo, WANG Jianpei. Shipborne acoustic tracking system positioning theory and error analysis[J]. Modern Electronics Technique, 2013, 23(1): 70-73.
[5] 唐秋華, 吳永亭, 丁繼勝, 等. 超短基線聲學定位系統的校準技術研究[J]. 聲學技術, 2006, 25(4): 281-287. TANG Qiuhua, WU Yongting, DING Jisheng, et al. Research on Calibration Technology of ultra short baseline acoustic positioning system[J]. Technical Acoustics, 2006, 25(4): 281-287.
[6] 張慶國, 王健培, 龔浩亮, 等. 船載式水聲定位系統信號處理改進算法研究[J]. 聲學技術, 2015, 34(3): 265-268. ZHANG Qingguo, WANG Jianpei, GONG Haoliang. Research on improved signal processing algorithm for shipborne underwater acoustic positioning system[J]. Technical Acoustics, 2015, 34(3): 265-268.
Research on automatic calibration technique of shipborne underwater acoustic positioning system
ZHANG Qing-guo, KUANG Biao, YAO Qing-sheng, LIAN Li
(Kunming Shipborne Equipment Research & Test Center, Yunnan, Kunming 650051, Yunnan,China)
On the basis of analyzing the calibration methods of conventional underwater acoustic positioning system, an automatic calibration method combining the development of the shipborne underwater acoustic positioning system is proposed. This method does not require routine dynamic or static calibration, and the system can be automatically detected and calibrated after each installation. The method uses both the transmitting transducer at the center of the array and the transmitting transducer at the water inlet end of a fixed connecting rod with the vessel to transmit acoustic calibration signals in turn, so that the acoustic positioning coordinates are obtained, and the GPS coordinates are obtained by two GPS antennas which are fixed correspondingly with the two transmitting transducers; then translates and deflects the acoustic positioning trajectory to make it well coincide with the GPS trajectory of running ship, and to obtain the offset parameter matrix. Thus, the system calibration is implemented. The experimental results show that this calibration method can complete all self-checking and calibration within two minutes. The most important operation in this method is to make the underwater acoustic positioning trajectory coincide well with the GPS trajectory of the running ship. The method has high calibration efficiency and high measuring accuracy.
shipborne system; underwater acoustic positioning system; automatic calibration method
U666.7
A
1000-3630(2018)-06-0535-05
10.16300/j.cnki.1000-3630.2018.06.004
2017-09-06;
2018-02-10
張慶國(1981-), 男, 黑龍江人, 研究方向為水聲工程技術。
張慶國, E-mail: ZQG750@126.com
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
