實時三維聲吶技術在平臺水下檢測中的應用
2019-01-07 03:25:38代兆立竇海余孫大權
石油工程建設 2018年6期
代兆立,竇海余,徐 爽,孫大權,蔡 彪
1.中國石油冀東油田公司,河北唐山 063004
2.中國石油集團海洋工程有限公司,北京 100028
灘海人工島處在復雜的海洋環境中,受到風、浪、流、海冰、風暴潮和地震等多種海洋環境因素的共同影響,損毀事件屢見不鮮,灘海人工島工程的安全檢測與預警是人工島建設與運行的重要保障[1-2]。
冀東南堡油田采用人工島海油陸采工程模式,1號構造相繼建成3座人工島,包括NP1-29平臺、3座海底管道(簡稱海管)登陸平臺(NP1-1D人工島的2座海管登陸平臺、NP1-2D人工島的1座海管登陸平臺)、NP1-3D人工島海底管道棧橋支撐平臺。由于近海風、浪、流、冰等動力因素的影響,平臺樁基周邊可能存在沖刷現象,嚴重時可能給安全生產帶來威脅。工程設計及相關標準都提出了定期檢測要求[3-4],檢測內容包括水深與海底地形測繪、平臺樁基探測、樁基沖刷、廢棄電纜及海底障礙物等。
常規檢測技術中有單波束、多波束、側掃等手段。由于各平臺水深較淺(1~3 m),平臺由群樁組成,形狀不規則,測量船舶難以抵近檢測,多年來各平臺樁基只能靠潛水員探摸作定性評估,無法進行定量檢測。經過技術比選,本工程采用三維聲吶掃測技術。三維聲吶掃測設備可實時顯示觀看水下地形,也可采集點云數據,而后在后續處理中顯示水下目標物的三維影像、水工建筑等影像資料。三維聲吶有非常好的可視化效果,可360°呈現水下目標物的形狀,距離相對分辨率達到4 cm,可輸出掃測目標物的三維數據。三維聲吶安裝非常方便,可以安裝在小艇、水下挖掘機、測量船、水下機器人[5]等上面,操作安全,有較高的安全系數。
本文介紹了三維聲吶測量技術首次在冀東灘海油田進行了水下工程檢測中的應用,檢測結果滿足了工程需要,可推廣應用。
1 三維聲吶測量技術簡介
1.1 測量原理
三維成像聲吶系統向目標區域發射聲信號,利用聲成像方法對接收到的回波信號進行處理,獲得一系列二維圖像(幀),通過計算機合成技術合成三維圖像。對于一次三維成像可以獲得兩種類型的幀,分別是距離圖像和振幅圖像,對這兩類聲納圖像處理實現目標的三維成像。為了保證測量精度,通過慣性導航系統進行姿態修正,以消除船舶在航行時縱橫搖擺的影響。
1.2 測量方法
測量使用水下三維聲吶設備結合配套軟件USE等進行系統配置和外業數據采集。使用船載TDL中繼站接收控制點基準站發射的差分信號,接入到慣性導航系統中進行RTK改正,提供高精度的定位數據;通過GNSS輸出時間數據(ZDA+1PPS),消除時間延遲誤差;使用慣性導航系統中的姿態儀輸出姿態和艏向數據實時改正船體姿態,消除波浪對船體姿態的影響;采用聲速剖面儀采集測區中聲速剖面數據,計算出測區平均聲速進行聲速改正,消除聲速變化對水深測量產生的誤差;通過USE等采集軟件實現對云臺和換能器的調節,根據測量目標位置與形態調整云臺方向,實現換能器方向與目標對準,再根據接收到的圖像實時調整換能器增益、閾值、量程等參數,使圖像數據最優化。
1.3 系統校準
測量實施前,需對IMU測量單元進行對準校正,測量船舶開始進行繞8字航行,校準程序將自動進行,直至慣性導航系統校準精度指標滿足系統預設要求即可。按照系統安裝校準要求,在測試海域平坦區域選取兩條平行測線進行距離約170 m的往返測量,考慮到實際水深為8 m左右,兩條平行測線測量間距取17 m;另外選取在水下有棱角分明的結構體兩側分別進行平行測線往返測量。
(1)橫搖(Roll)校準。在兩條平行測線的相對位置選取影像,選取影像重疊區域達60%以上進行校準,校準使得profile line點基本在一條線上,校準結果score值為0.009 8<0.01,則校準結果滿足測量需求。
(2)艏向(Yaw)校準。在同一測線相鄰位置上選取有棱角的結構體影像,校準使得結構體相同區域完全重合,則校準結果滿足測量需求。
(3)縱搖(Pitch)校準。在同一測線相鄰位置選取影像,影像重疊區域達60%以上進行校準,校準使得profile line點基本在一條線上,校準結果score值為0.006 8<0.01,則校準結果滿足測量需求。
(4)X校準。在不同測線相對位置上選取有棱角的結構體影像,校準使得結構體相同區域完全重合,則校準結果滿足測量需求。
(5)Y校準。在不同測線相對位置上選取有棱角的結構體影像,校準使得結構體相同區域完全重合,則校準結果滿足測量需求。
1.4 數據采集
合理調整換能器增益、閾值、量程等參數,獲取干凈的數據,再按照預定的測量方式,沿著測線進行數據采集。一段區域數據采集完成后,及時查看數據完整性,對于缺失部分進行補測。
1.5 內業匯編
(1)圖像拼接及噪聲處理。選擇測量效果好的區域進行圖像拼接,再進行噪聲一級處理和二級處理。確保圖像數據干凈、可靠。
(2)測量成果分析。根據平臺基樁掃測結果,認真研判掃測圖像,判斷樁基是否存在異常;確定海床和樁基沖刷、淤積等情況;確定廢棄電纜及海底異常等情況。
2 工程應用
測試設備采用Echoscope實時三維聲吶系統,見圖1。三維成像聲吶系統向目標區域發射聲信號,利用聲成像的方法對接收到的回波信號進行處理。Echoscope聲吶系統工作時,通過聲納探頭發射一個頻率為375 kHz的聲波信號,形成一個50°×50°的扇形掃描區域,每次聲波發射包含128×128個波束,以相同的間隔排列,每個聲波間距為0.39°;系統接收到回波信號后進行聲成像處理,生成一個二維圖像(幀);系統以20 Hz的速度更新數據,再通過計算機合成技術將這一系列的幀合成為三維圖像。為了保證測量精度,通過慣性導航系統進行姿態修正,以消除船在航行時縱橫搖擺的影響。

圖1 Echoscope實時三維聲吶系統
平面基準采用1954年北京坐標系,高斯-克呂格投影;投影參數中央子午線118°30′E,東向加常數50萬m,北向加常數0 m。高程(深度)基準采用曹妃甸理論最低潮面。水位控制使用登陸點設計高程進行控制。
為滿足人工島周邊水域測量要求,本項目建立了臨時基準站。在NP1-1D、NP1-2D、NP1-3D登陸點分別布設臨時潮位驗潮點,使用登陸點設計高程進行人工驗潮,精確至1 cm,每10 min量取一次并記錄。驗潮在每天測量前10 min開始,水深測量后10 min結束。
2.1 NP1-1D海管登陸平臺水下檢測
對NP1-1D海管登陸平臺周圍進行三維掃測,掃測角度為20°,聲吶探頭與特征物之間掃測距離約8.8 m,探頭距離海底約7.9 m。
掃測結果表明,NP1-1D引橋東側海管平臺樁基周圍3 m范圍內有約50 cm的凹坑(見圖2),水下樁基未發現異常。
2.2 NP1-2D海管登陸平臺水下檢測
對NP1-2D海管登陸平臺周圍進行三維掃測,掃測角度為30°,聲吶探頭與特征物之間掃測距離約13.9 m,探頭距離海底深度約5.7 m。
掃測結果表明,NP1-2D西側海管登陸平臺未發現地形異常情況,未發現樁基異常(見圖3);NP1-2D北側(引橋邊)海管登陸平臺,因水深小于4 m,掃測數據噪點過多,無法形成有效影像。根據低潮時人工巡視及水深數據,認為海管樁基無異常,樁基下海床無溝槽和深坑。
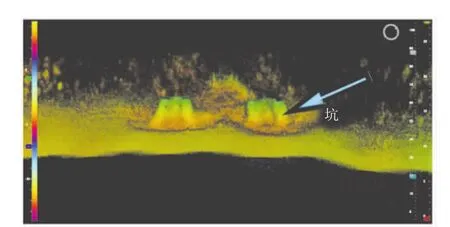
圖2 NP1-1D海管登陸平臺樁基掃測地形
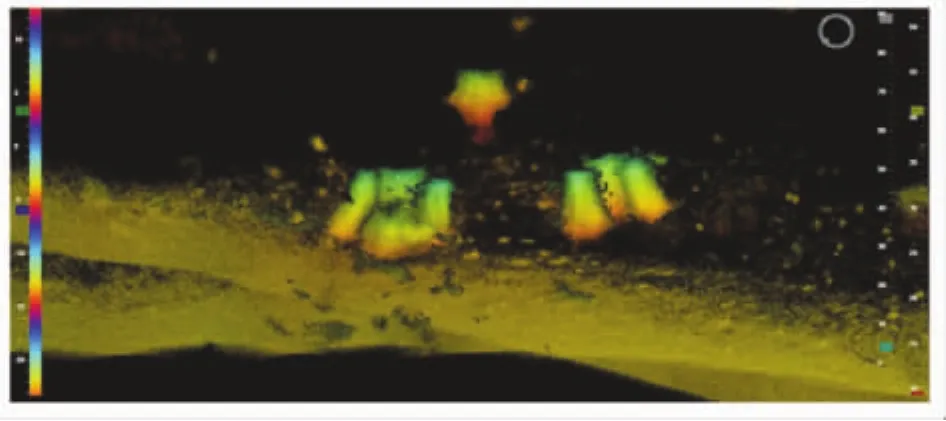
圖3 NP1-2D西側海管登陸平臺樁基掃測地形
2.3 NP1-29平臺水下檢測
對NP1-29平臺周圍進行三維掃測,掃測角度為20°,水下樁基掃測高度約7 m。
掃測結果表明,西北側樁基北側有長44 m、寬約14 m、較周圍地形深2.6 m的溝槽(見圖4~6)。
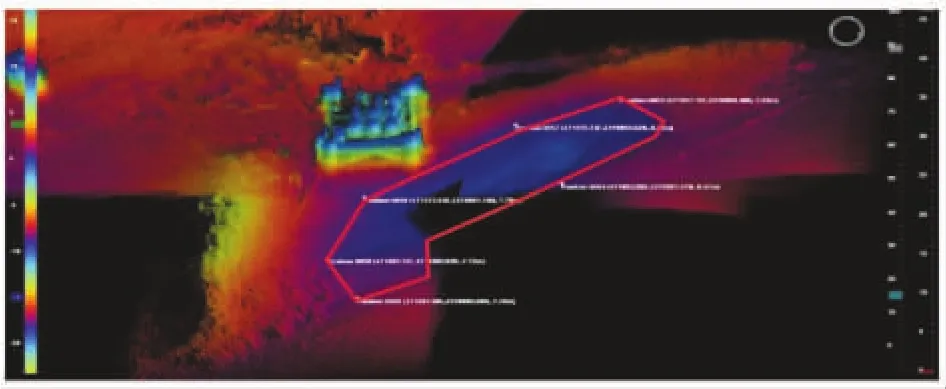
圖4 NP1-29平臺西北側溝槽位置

圖5 NP1-29平臺西北側溝槽深度
2.4 NP1-3D海管棧橋支撐平臺水下檢測
對NP1-3D海管棧橋支撐平臺周圍進行三維掃測,掃測角度為20°,聲吶探頭與特征物之間掃測距離約7.2 m,探頭距離海底深度約3.0 m。
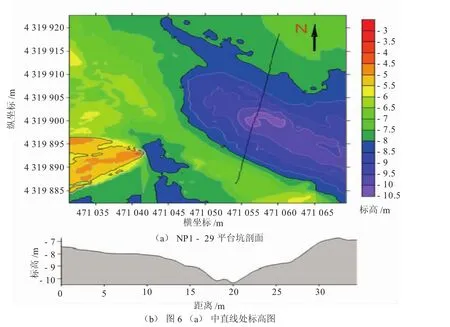
圖6 NP1-29平臺溝槽區域剖面
掃測結果表明,NP1-3D海管棧橋支撐平臺樁基寬度約11 m,樁基下方有較小溝槽(見圖7),樁基底部呈三角形狀。上部水深小于3 m,上部掃測時噪點較大,無法形成影像,根據低潮時對樁基的觀察,樁基無破損等異常。

圖7 NP1-3D海管棧橋支撐平臺樁基掃測
3 結束語
介紹了水下三維聲吶測量技術,采用Echoscope實時三維聲吶系統對1號構造平臺樁基進行了系統檢測,首次在灘海區域對平臺樁基地形地貌進行了三維定量測試,主要結論如下:
(1)對于水深大于3 m的平臺,其樁基可采用Echoscope實時三維聲吶系統進行水下檢測;水深小于3 m時,需進行現場試驗確定。
(2)冀東油田1號構造平臺樁基未發現異常。NP1-1D引橋東側海管平臺樁基周圍3 m范圍內有約0.5 m的凹坑;NP1-29平臺西北側樁基北側有長44 m、寬約14 m、較周圍地形深2.6 m的溝槽;NP1-3D海管棧橋支撐平臺樁基寬度約11 m,樁基下方有較小溝槽,樁基底部呈三角形狀。
(3)檢測成果滿足工程要求,水下檢測技術可推廣應用。
(4)水下三維聲吶檢測應建立統一的技術標準,以滿足水下工程檢測要求。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
城市道橋與防洪(2019年5期)2019-06-26 00:55:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年11期)2017-07-31 17:56:30
海峽科技與產業(2016年3期)2016-05-17 04:32:12
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21