球桿系統(tǒng)建模及其閉環(huán)控制器的設計
2019-01-07 02:40:46劉詩宇
現(xiàn)代機械 2018年6期
劉詩宇
(西北工業(yè)大學機電學院,陜西西安710068)
0 引言
在現(xiàn)代控制理論中,球桿系統(tǒng)是一個經(jīng)典的控制系統(tǒng)研究對象(圖1),由于其非線性特性及開環(huán)系統(tǒng)的不穩(wěn)定性,球桿系統(tǒng)實驗裝置可應用于控制理論及方法的研究[1]。對于球桿系統(tǒng)的建模過程以及閉環(huán)系統(tǒng)控制器的設計,仍有著許多可研究的角度和方法。
文獻[2]提出了基于牛頓力學法和基于拉格朗日法的建模過程,并討論了PID控制器的設計過程;文獻[3]對系統(tǒng)微分方程在平衡位置點上進行線性化處理,通過極點配置法設計了狀態(tài)反饋矩陣。這兩種控制器的設計方法均較為隨機,例如PID控制主要依靠調(diào)節(jié)比例控制Kp、積分控制Ki和微分控制Kd這三個參數(shù)來決定控制器的性能,其實際值僅通過調(diào)試的方法進行選取,過程較為繁瑣;而通過極點配置法設計控制器,也僅需將極點配置在復數(shù)域的負半平面,以使得閉環(huán)系統(tǒng)穩(wěn)定,而對于實際極點的選擇也較為隨機,選取不恰當?shù)臉O點會影響閉環(huán)系統(tǒng)的特性。文獻[4]、[5]分別提出了最優(yōu)魯棒控制器和基于遺傳算法的線性二次型控制方法,但文獻中提出的模型都經(jīng)過了明顯簡化,仿真結(jié)果和實際情況會有一定差異。文獻[6]提出了基于LQR的最優(yōu)控制器設計,該線性控制器的設計方法具有較強的實際意義,然而文獻中對于球桿系統(tǒng)建模及LQR最優(yōu)控制中權(quán)重矩陣Q、R的研究均過于簡化。
圖1 球桿系統(tǒng)實驗平臺
本文針對球桿系統(tǒng)的研究現(xiàn)狀,基于拉格朗日法重新建立了球桿系統(tǒng)的全量模型,并通過基于線性二次型(LQR)的最優(yōu)控制,設計了系統(tǒng)狀態(tài)反饋控制器。此設計過程即選取負反饋矩陣Kopt的值,使得閉環(huán)系統(tǒng)在內(nèi)部穩(wěn)定的前提下,對系統(tǒng)的動勢能及驅(qū)動器的電能消耗進行優(yōu)化。另外,本文在狀態(tài)反饋控制器的基礎上,提出了軌跡追蹤器的設計方法,并在Matlab-Simulink仿真環(huán)境下驗證了該控制器設計方法的有效性。
1 球桿系統(tǒng)建模
1.1 基于拉格朗日法的建模過程
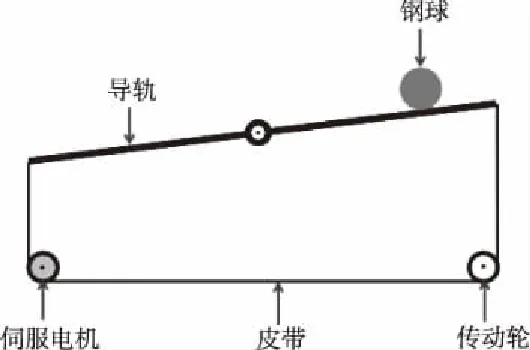
圖2 球桿系統(tǒng)簡圖
經(jīng)典的球桿系統(tǒng)實驗平臺是由導軌、鋼球、皮帶、傳動輪、伺服電機和電源等組成,其系統(tǒng)簡圖如圖2。導軌中心固定,兩端與皮帶相連,伺服電機由帶傳動方式將驅(qū)動軸的轉(zhuǎn)動角轉(zhuǎn)化為導軌的俯仰角變化。導軌旋轉(zhuǎn)中心設置有角度傳感器,測量導軌的傾斜角度。導軌上方安裝攝像頭,以測量小球在導軌上的位置。
為便于研究計算,本文將按表1所示的命名規(guī)則對系統(tǒng)各部件參數(shù)及變量進行表示。
根據(jù)文獻[6],球桿系統(tǒng)的數(shù)學模型可通過拉格朗日方程描述。其優(yōu)勢在于通過求解系統(tǒng)的總動能和總勢能即可求出系統(tǒng)微分方程,無需對系統(tǒng)各子部分進行建模。為得出系統(tǒng)總動能,首先對小球在導軌上的復合運動進行分析。
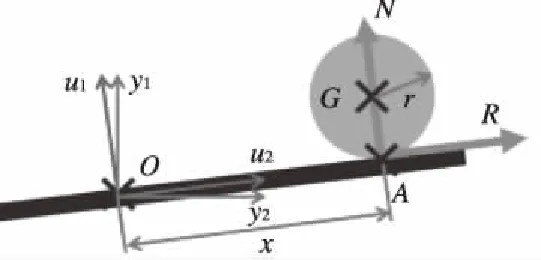
圖3 小球運動及坐標系簡圖

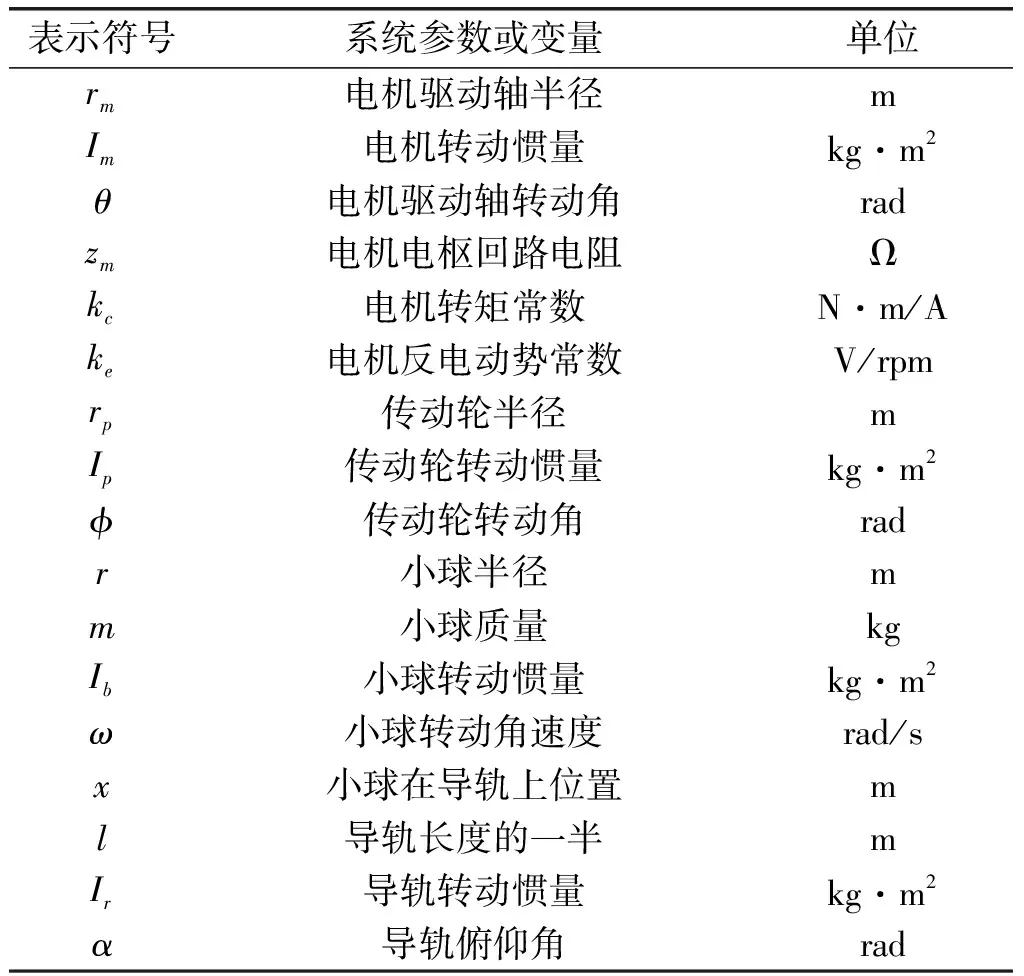
表1 系統(tǒng)參數(shù)及變量表示
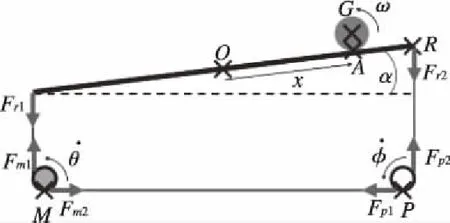
圖4 球桿系統(tǒng)速度關系
對球桿系統(tǒng)整體做出合理假設如下:1)小球在導軌上作純滾動運動,忽略小球和導軌之間的滑動及產(chǎn)生的摩擦;2)忽略帶傳動過程中的能量損失以及皮帶的彈性性質(zhì)所產(chǎn)生的位移和形變。則根據(jù)圖4可得到以下關系:
系統(tǒng)總動能為:
系統(tǒng)總勢能可表示為:
V=mg(xsin(α)+rcos(α))+cst
根據(jù)拉格朗日方法,構(gòu)造拉格朗日因子。則系統(tǒng)運動模型可由拉格朗日微分方程描述:
其中:qi代表廣義坐標,即為系統(tǒng)的主要研究變量x和α;Qi為廣義力,可由虛功原理求解,可設:
其中:Qx=0,由于球桿系統(tǒng)在系統(tǒng)變量x上并未受到外力作用,小球在導軌上自由滾動。設δW為伺服電機做的虛功,則與電機驅(qū)動軸虛位移的關系有:
δW=Cmδθ
其中:Cm為電機輸出力矩。
對直流伺服電機進行建模,直流伺服電機由伺服電壓控制,其輸入電壓信號Uc、感應電動勢e及輸出力矩Cm分別可由下式表示。
Cm=kci

1.2 系統(tǒng)狀態(tài)空間表示及其線性化
系統(tǒng)動力學微分方程可用矩陣形式表示:
為計算簡便,可設:
J2=(Ib+mr2)
根據(jù)文獻[7]所闡述的控制系統(tǒng)狀態(tài)空間表示法,可設系統(tǒng)狀態(tài)向量:
故可得到該非線性系統(tǒng)的狀態(tài)空間表達式:
其中系統(tǒng)輸入量為直流電機輸入的電壓信號:U=Uc。
由上式可知,系統(tǒng)狀態(tài)x1e=xeq的平衡位置并未確定。即當導軌的俯仰角為0°時(導軌保持水平),小球可以在導軌上任意位置保持平衡,電機通過帶傳動在導軌上施加的平衡力矩,使得小球保持靜態(tài)平衡。在實際問題中,顯然選取x1e=0(小球位于導軌正中心),故Ue=0。
將得到的平衡位置點處的系統(tǒng)狀態(tài)量代入,對非線性系統(tǒng)進行線性化,可最終得到線性系統(tǒng)的狀態(tài)空間表達式:
其中:δX=X-Xe,δU=U-Ue,顯然由于平衡位置點的選擇,可將線性方程簡化為:
即在平衡位置附近線性化得到的系統(tǒng)空間狀態(tài)模型,可用于描述系統(tǒng)在任意位置的運動規(guī)律。
此處,矩陣A、B描述了系統(tǒng)的運動規(guī)律及控制規(guī)律,由線性化過程可得到:
而Y為系統(tǒng)輸出向量,此處考慮系統(tǒng)為全狀態(tài)量輸出,以便于設計系統(tǒng)的狀態(tài)反饋控制器。故可得到輸出矩陣C和D的值:
2 基于LQR的狀態(tài)反饋控制器設計
由文獻[7-8]所闡述的狀態(tài)反饋控制器的設計方法,以及采用基于線性二次型(LQR)的最優(yōu)控制對控制器環(huán)節(jié)進行選取的過程,可設計狀態(tài)負反饋調(diào)節(jié)輸入量:
U=-KX+Uc
其中:Uc為系統(tǒng)外部輸入量(此處為電機輸入的電壓信號),K為待設計的狀態(tài)反饋增益矩陣。則閉環(huán)系統(tǒng)可表示為:
Q為半正定的狀態(tài)加權(quán)矩陣,R為正定的控制加權(quán)矩陣。根據(jù)文獻[9]所闡述的基于二次型的最優(yōu)控制設計方法可知,令二次型的性能指標J取極小值時,最優(yōu)控制率可表示為:
Uopt=-R-1BTKX
其中:K為Reccati方程的常數(shù)解,該方程表示為:
KA+ATK-KBR-1BTK+Q=0
對于本文所研究的球桿系統(tǒng),設計二次型性能指標函數(shù)J,以優(yōu)化球桿系統(tǒng)運動過程中的動能、勢能以及系統(tǒng)控制過程中所消耗的電能,并且考慮系統(tǒng)主要控制對象x、α的控制誤差。系統(tǒng)內(nèi)部的動能和勢能可分別表示如下:
V=mg(xsin(α)+rcos(α))+cst≈(α→0)mgxα+cst
系統(tǒng)內(nèi)部消耗的電能可表示為:

并且該控制系統(tǒng)主要目的是通過控制導軌俯仰角α從而控制小球在導軌上的位置x,故可針對系統(tǒng)狀態(tài)量x和α設置偏差函數(shù):
Je=x2+0.5α2

其中:S為XTU交叉項的加權(quán)矩陣。經(jīng)過簡單的矩陣轉(zhuǎn)化,可將上式表示為:
R(U+R-1STX)]dt
可設U′=U+R-1STX,Q′=Q-SR-1ST。則可將上式轉(zhuǎn)化為一般的二次型性能指標函數(shù),且此時原線性系統(tǒng)表示為:
=(A-BR-1ST)X+BU′
根據(jù)一般形式下最優(yōu)控制率的解,可得:
U′=-R-1BTKX
最終可得最優(yōu)控制率為:
Uopt=U′-R-1STX=-R-1(BTK+ST)X
其中K為以下Reccati方程的常數(shù)解:
K(A-BR-1ST)+(A-BR-1ST)TK-KBR-1BTK+(Q-SR-1ST)=0
即對于閉環(huán)控制系統(tǒng),最優(yōu)控制下的狀態(tài)反饋矩陣為:
Kopt=-R-1(BTK+ST)
對于權(quán)重矩陣Q、R、S的選取,根據(jù)前文對系統(tǒng)動勢能、消耗電能以及系統(tǒng)狀態(tài)量x和α偏差函數(shù)的建立,易求得:
3 軌跡追蹤問題及設計方法
對于軌跡追蹤問題,電機輸入的電壓信號不再作為閉環(huán)系統(tǒng)的輸入量,而是將參考軌跡作為系統(tǒng)輸入。對于本文研究的球桿系統(tǒng),將系統(tǒng)狀態(tài)量x,即小球在導軌上的位置作為參考輸入。此時閉環(huán)系統(tǒng)反饋控制率可表示為:
U=-KX+GXd
其中:Xd即為系統(tǒng)外部輸入的參考軌跡;G為待設計的補償增益矩陣;K為狀態(tài)反饋矩陣,可通過極點配置法或上文討論的最優(yōu)控制法求得,以使得閉環(huán)系統(tǒng)滿足穩(wěn)定性要求。則加入軌跡追蹤環(huán)節(jié)的閉環(huán)控制系統(tǒng)可由下式和圖5所示的系統(tǒng)框圖表示。
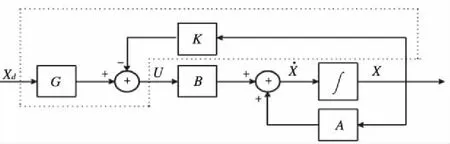
圖5 閉環(huán)系統(tǒng)框圖
重新構(gòu)造系統(tǒng)空間狀態(tài)方程,加入外部參考狀態(tài)量Xd,則未加入補償增益矩陣G的開環(huán)系統(tǒng)可表示為:
其中:X仍為系統(tǒng)的狀態(tài)向量,Xd=xd為針對小球在導軌上的位置x而輸入的參考軌跡。則根據(jù)上文研究的球桿系統(tǒng)可知:A11=A,B1=B。且系統(tǒng)的參考軌跡輸入并不會影響系統(tǒng)內(nèi)部的運動規(guī)律,則有:
若此處Xd考慮為系統(tǒng)外部干擾,則矩陣A12可通過對擾動與系統(tǒng)運動產(chǎn)生的影響進行建模求得。并且,在本文研究內(nèi)容中,由于參考輸入僅為系統(tǒng)狀態(tài)x需要追蹤的一條軌跡,其本身并不需要運動方程描述,故A22=0。
可設系統(tǒng)仍為全狀態(tài)量輸出,且外部參考軌跡Xd并不需要輸出。故有:
根據(jù)文獻[7]中關于軌跡追蹤器的設計方法,可知該線性系統(tǒng)方程可解,當且僅當存在Ta、Fa使得:
通過解得的Ta、Fa以及前文已設計的狀態(tài)反饋矩陣Kopt,可求得系統(tǒng)追蹤器的狀態(tài)反饋控制率為:
U=-KoptX+(Fa-KoptTa)Xd
即閉環(huán)系統(tǒng)軌跡追蹤的補償增益矩陣:
G=Fa-KoptTa
4 仿真研究
4.1 狀態(tài)反饋控制器仿真
下面通過在Matlab-Simulink環(huán)境下進行的數(shù)值仿真來驗證上述的基于LQR的狀態(tài)反饋控制器和軌跡追蹤器設計方法的有效性。根據(jù)文獻[10]提供的球桿系統(tǒng)實驗平臺各參數(shù)的實際數(shù)值,可得到系統(tǒng)空間狀態(tài)表示的常數(shù)矩陣:
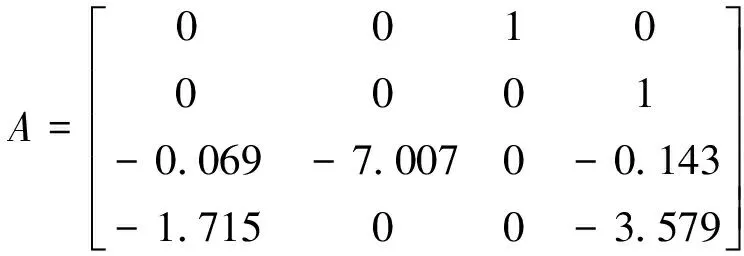
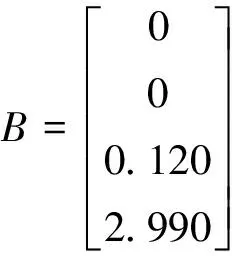
對于LQR最優(yōu)控制中權(quán)重矩陣的選取,代入實際數(shù)值后可得:
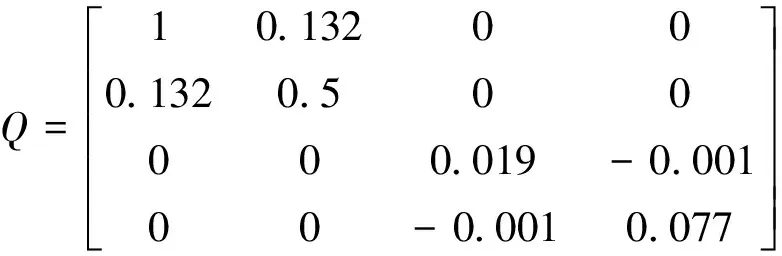
R=0.385
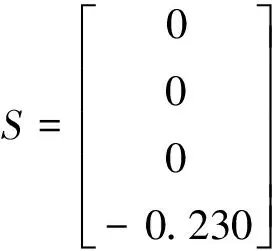
在實際問題中,閉環(huán)系統(tǒng)控制器性能主要考慮的指標是系統(tǒng)狀態(tài)的穩(wěn)定性以及對系統(tǒng)外部參考的追蹤效果,而對系統(tǒng)消耗的能量要求并不嚴苛,故可增加LQR中對于系統(tǒng)狀態(tài)權(quán)重矩陣Q的比重。在此研究實例中,可選取:Qs=500Q,Rs=R,Ss=S。并借助Matlab中Care函數(shù)(Continuous-time Algebraic Reccati Equation),可求得閉環(huán)系統(tǒng)最優(yōu)控制的狀態(tài)反饋矩陣:
Kopt=[-36.634 75.635 -29.192 12.217]
對于軌跡追蹤問題,將矩陣A11=A,B1=B中代入實際數(shù)值,可求得:
Fa=0.574
則補償增益:G=Fa-KoptTa=-36.060。
在Simulink仿真環(huán)境下實現(xiàn)了閉環(huán)線性系統(tǒng),并且關于反饋矩陣K的選取,對比了傳統(tǒng)的極點配置法和基于LQR的最優(yōu)控制法所設計的閉環(huán)系統(tǒng)性能。則對于仿真實驗,給定系統(tǒng)輸入的電壓信號如圖6。
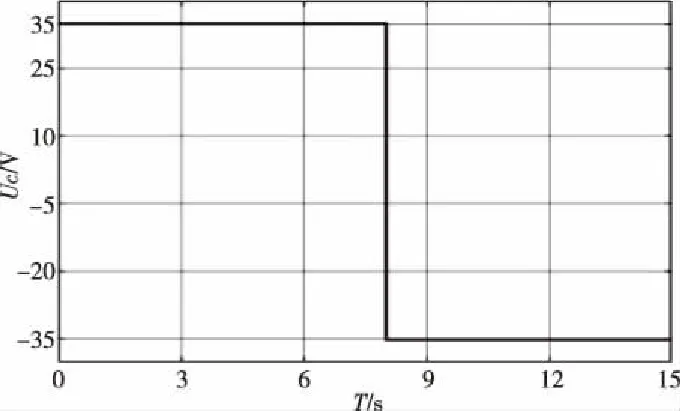
圖6 閉環(huán)系統(tǒng)電壓輸入
根據(jù)文獻[3]中提出的極點配置法,選取閉環(huán)系統(tǒng)A-BK的特征值:
則可得到狀態(tài)反饋矩陣:
K=[-865.7 1718.1 -771.5 200.3]
將兩種方法求得的反饋矩陣分別進行仿真實驗,給定同樣的電壓輸入信號,觀察閉環(huán)系統(tǒng)對于小球在導軌上位置x的響應。
圖7展示了對于兩種方法求得的反饋矩陣K,閉環(huán)系統(tǒng)關于小球位置x相應的輸出響應。可知兩種設計方法得到的閉環(huán)系統(tǒng)均穩(wěn)定,且響應時間均較短(1.5 s左右)。然而由于極點配置法求得的反饋增益的值較大,使得系統(tǒng)響應輸出量較小,影響了系統(tǒng)對輸入信號的敏感度,而降低K值的選取又會影響系統(tǒng)的穩(wěn)定性。在對閉環(huán)系統(tǒng)A-BK極點的選取過程中,對于共軛復數(shù)根實際值的不同選取也會影響系統(tǒng)的震蕩性。而根據(jù)LQR的最優(yōu)控制所涉及的閉環(huán)系統(tǒng)控制器,顯然在閉環(huán)系統(tǒng)穩(wěn)定的前提下,系統(tǒng)響應時間較短,超調(diào)量較小,并且選取的反饋增益的值也更貼合實際(考慮了對系統(tǒng)能量及電機電能消耗的優(yōu)化),在實際問題中突顯了其設計方法的優(yōu)越性。
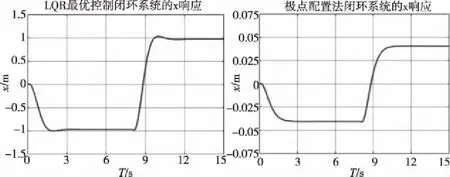
圖7 小球位置輸出響應
4.2 軌跡追蹤器仿真
在Simulink仿真環(huán)境下,實現(xiàn)了對閉環(huán)系統(tǒng)軌跡追蹤器的建模仿真,并給定外部輸入的參考軌跡Xd如圖8。
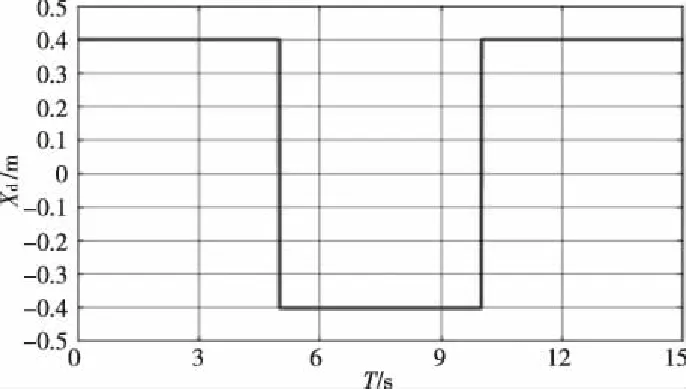
圖8 小球位置x的參考軌跡輸入
在仿真中,可得到閉環(huán)系統(tǒng)對于參考軌跡xd追蹤的響應曲線以及球桿系統(tǒng)輸入的控制電壓U=-KX+GXd,分別由圖9和圖10表示。
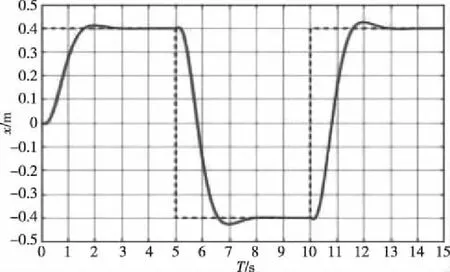
圖9 小球位置x的響應曲線
由圖9可得,閉環(huán)系統(tǒng)對軌跡追蹤的響應時間約為2s,且穩(wěn)態(tài)誤差很小。且由圖10可知,系統(tǒng)控制電壓滿足實驗平臺對輸入電壓的限制(最大電壓不超過35V),該閉環(huán)系統(tǒng)軌跡追蹤器的設計得到驗證。
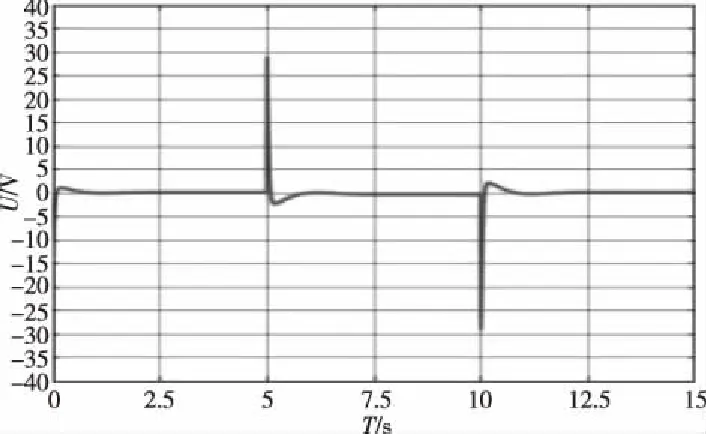
圖10 閉環(huán)控制系統(tǒng)輸入電壓
5 結(jié)論
本文在詳細分析球桿系統(tǒng)基本原理的基礎上,運用拉格朗日法建立了系統(tǒng)的全量數(shù)學模型,并對系統(tǒng)的非線性模型進行了線性化處理。針對線性化模型,研究了基于LQR的最優(yōu)控制,設計了系統(tǒng)狀態(tài)追蹤器。并在Simulink仿真環(huán)境下實現(xiàn)了建模、仿真實驗,對比研究了分別通過極點配置法和基于LQR的最優(yōu)控制所得到的閉環(huán)系統(tǒng)控制器性能。利用極點配置法設計控制器具有操作簡便的特點,但是對于所配置極點的選取具有一定的難度,其隨機性會影響控制系統(tǒng)的性能。且此方法并未考慮實際情況,例如在實際問題中,若配置的極點過于遠離復數(shù)域的原點,會使得控制器反饋增益矩陣K的值較大,導致控制器成本過高或系統(tǒng)消耗的能量過大。相反,基于LQR的最優(yōu)控制可在滿足閉環(huán)系統(tǒng)穩(wěn)定的前提下,對設計的二次型性能指標函數(shù)進行優(yōu)化,求得反饋增益矩陣的一個優(yōu)化解。例如在本文所研究的球桿系統(tǒng)中,優(yōu)化了系統(tǒng)動勢能和電機驅(qū)動所消耗的電能,且文中探討的設計過程有效地提出了權(quán)重矩陣Q、R和S的選取方法。顯然該設計方法在實際問題中具有更大的優(yōu)勢。
本文在設計狀態(tài)反饋控制器的基礎之上,增加了軌跡追蹤器環(huán)節(jié),即討論了補償增益矩陣G的選取過程,使得系統(tǒng)狀態(tài)量和參考軌跡輸入量的誤差趨近于零。最終通過Simulink仿真結(jié)果表明,本文設計的狀態(tài)反饋控制器及軌跡追蹤器達到了理想的設計效果。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
