基于模糊控制的混合臂高空作業車工作斗調平控制系統研究
2019-01-07 02:40:50曾致豪王凱麗
現代機械 2018年6期
周 攀,侯 帥,曾致豪,王凱麗,周 靜,付 耀,宋 超
(長安大學工程機械學院,陜西西安710064)
0 引言
混合臂高空作業車在高空作業中應用領域廣泛,如建筑工地、消防、維修等工況復雜的場合,而混合臂高空作業車工作斗的調平技術至關重要,其工作臂較長,響應性較差,在舉升過程中易發生抖動,造成工作人員在高空作業時不安全。因此,研究混合臂高空作業車工作斗調平至關重要。石家莊鐵道大學的高蘭用PLC控制調平油缸,設計了模糊PID控制系統;長安大學的雷曉順等人針對閥控液壓馬達系統設計了模糊控制系統[1-2]。上述研究為混合臂高空作業車工作斗調平提供了理論依據,也為模糊PID控制系統提供了新思路。
1 混合臂高空作業車結構、作業特點及調平要求
1.1 混合臂高空作業車結構
混合臂高空作業車結構如圖1。
1.2 混合臂高空作業車作業特點
結合臂架結構及舉升幅角變化,該高空作業車工作斗調平控制系統的特點如下:
1)工作斗結合伸縮臂、折疊臂的旋轉,配合轉臺的回轉,其作業空間較大。
2)工作斗相對于伸縮臂、折疊臂變幅可反向轉動,適應于復雜、非結構性環境。
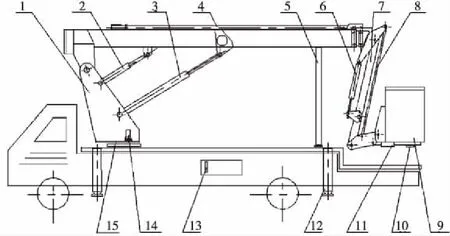
1-轉臺;2-平衡油缸;3-伸縮臂變幅油缸;4-伸縮油缸;5-伸縮臂支架;6-折疊臂變幅油缸;7-折疊臂;8-平衡拉桿;9-工作斗;10-角度傳感器;11-調平油缸;12-支架;13-油箱;14-回轉機構;15-回轉支承。圖1 混合臂高空作業車結構
3)混合臂高空作業車在舉升過程中由同1個PLC控制器控制,即伸縮臂、折疊臂和工作斗的三個輸入間為互鎖關系,提高了工作斗的平穩性和可靠性[3]。
1.3 調平要求
基于上述混合臂高空作業車的作業特點,對工作斗調平控制系統的要求為:穩定性高、響應快速、精度高(參考高空作業車國家標準,規定該調平控制系統工作斗與水平面的夾角不超過5°)。
2 混合臂高空作業車調平控制系統方案
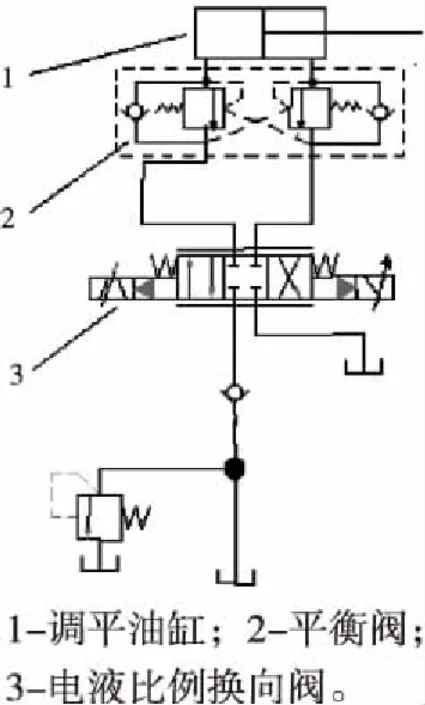
圖2 電液比例調平原理
綜合考慮混合臂高空作業車工作斗調平所需具備的精確性、快速性和穩定性,選用電液比例調平機構。伸縮臂、折疊臂旋轉的角度α、β之和與工作斗旋轉的角度ω大小相等,方向相反,但實際上|ω|≠|α+β|,允許工作斗與水平面之間的角度在5°范圍。工作斗上安裝有角度傳感器,角度傳感器將檢測到的角度信號輸入給主控制器PLC,信號經控制器處理后驅動電液比例換向閥3,控制電液比例換向閥3的閥口開度和換向,然后壓力油經平衡閥2作用給調平油缸1,調平油缸1中活塞桿伸長或縮短,工作斗正轉或反轉,工作斗轉動角度與工作斗角度傳感器檢測到的信號成比例。電液比例調平原理如圖2。混合臂高空作業車工作斗調平控制系統的控制原理如圖3。
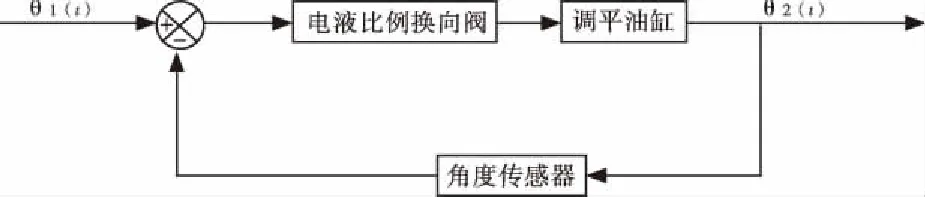
圖3 混合臂高空作業車工作斗調平控制系統的控制原理
3 混合臂高空作業車工作斗調平控制系統建模與仿真
3.1 混合臂高空作業車工作斗調平控制系統建模
通常將電液比例閥視為一個由二節振蕩環節和二節比例環節組成[4],其傳遞函數為:
(1)
式中:Xv—電液比例閥的閥芯位移;I—輸入電液比例閥的電流;Kv—電液比例閥的增益;ωv—電液比例閥的固有頻率;δv—電液比例閥的阻尼比系數。
調平控制系統在工作時,調平油缸的傳遞函數為[1]:
(2)
式中:Km—電液比例閥的流量增益;Am—負載有效流量面積;ωh—壓力油固有頻率;δh—壓力油的阻尼比系數。
角度傳感器在有效空間為一比例環節[1],其傳遞函數為:
(3)
式中:K0—等效比例系數,取K0=1。
調平控制系統的開環傳遞函數為:
(4)
調平控制系統的閉環傳遞函數為:
(5)
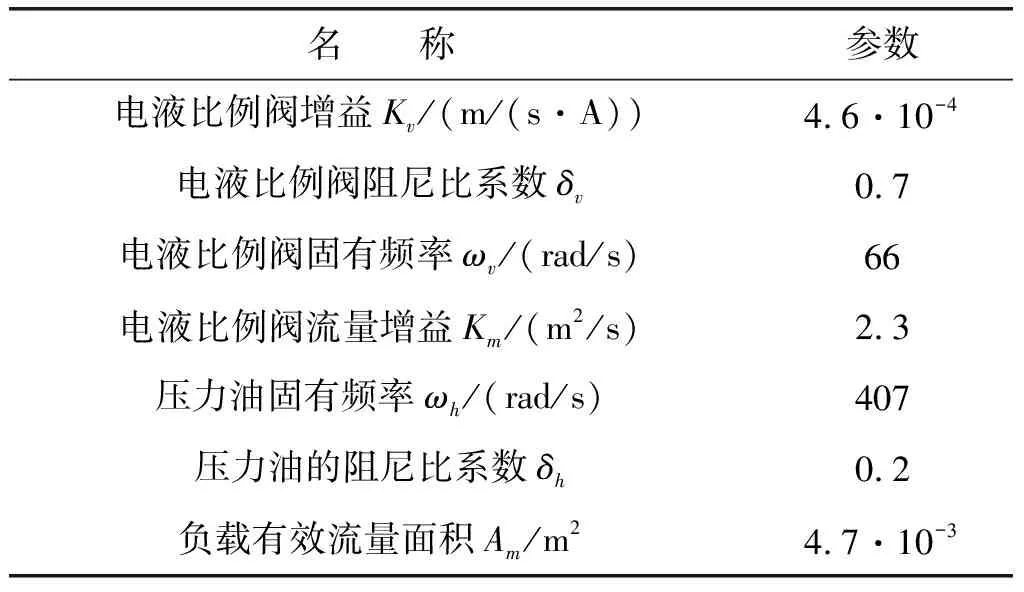
表1 系統基本參數
系統基本參數如表1所示。代入數據得,控制系統框圖如圖4。
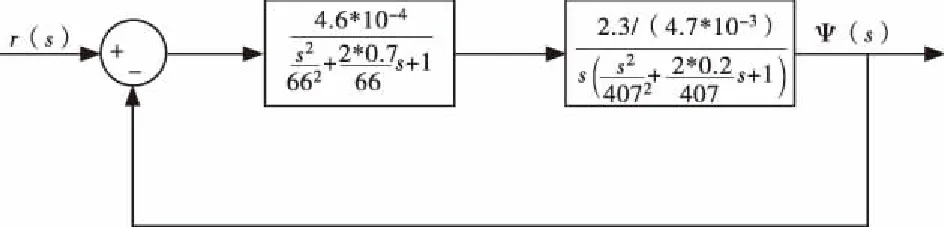
圖4 控制系統框圖
3.2 混合臂高空作業車工作斗調平控制系統仿真
調平控制系統Bode圖如圖5,相位裕度和幅值裕度均為正,該調平控制系統是穩定的。由Simulink仿真可得出控調平制系統單位階躍響應曲線(圖6),調平控制系統能達到穩定狀態,但響應較慢,需設計模糊PID控制器。
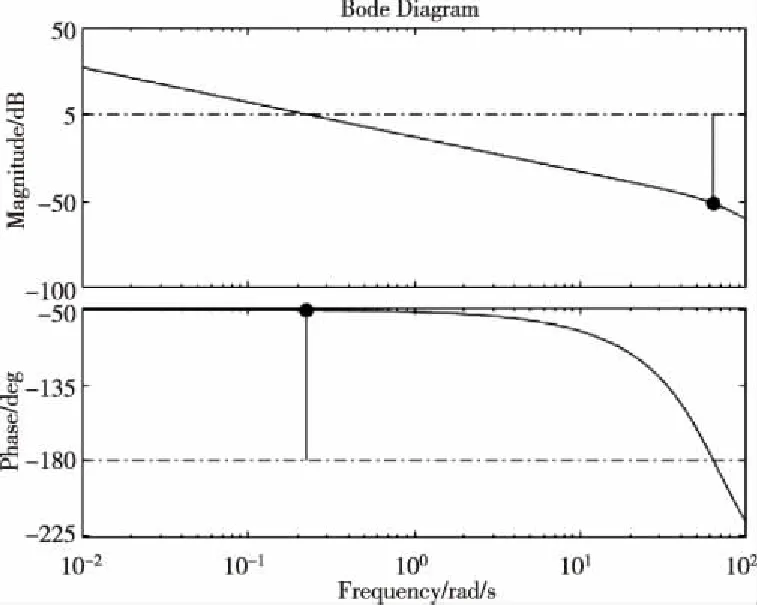
圖5 調平控制系統Bode圖
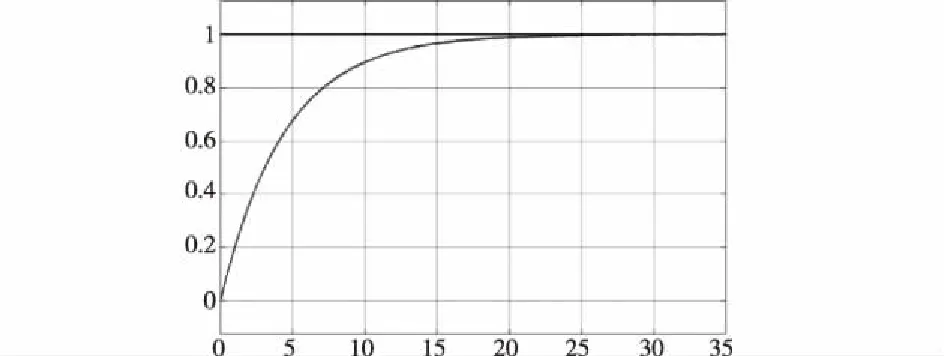
圖6 調平控制系統單位階躍響應曲線
4 混合臂高空作業車工作斗調平控制系統模糊PID控制器設計
混合臂高空作業車工作斗模糊PID調平控制系統原理圖如圖7。調平控制系統在運行中,不斷檢測e和ec,根據模糊控制原理對3個參數在線修改以滿足不同e和ec時對控制參數的要求,從而使得混合臂高空作業車工作斗在滿足該調平控制系統要求的精度下平穩,快速的調平。
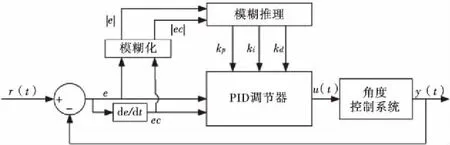
圖7 混合臂高空作業車工作斗模糊PID調平控制系統原理
4.1 確定混合臂高空作業車調平控制系統模糊規則
模糊PID控制器以角度偏差e和角度偏差變化率ec作為輸入,變量kp,ki,kd作為輸出,將e,ec,kp,ki,kd的模糊子集設為{負大、負中、負小、零、正小、正中、正大}={NB、NM、NS、ZO、PS、PM、PB},角度偏差e、角度偏差變化率ec和kp的論域均為{-6,-4,-2,0,2,4,6},ki和kd的論域均為{-3,-2,-1,0,1,2,3}。NB、PB為S型函數,其它為trimf函數。根據已有PID控制系統的設計經驗,得模糊控制參數調節器對PID參數的調整規律[1]:
1)當角度偏差|e|較大時,kp取值較大,kd較小,ki為零;
2)當角度偏差|e|和角度偏差變化率|ec|中等大小時,kp取值較小,ki和kd適中;
3)當角度偏差|e|較小時,ki和kp取值較大;
4)當角度偏差變化率|ec|較小時,kd中等大小;
5)當角度偏差變化率|ec|較大時,kd取值較小。
根據經驗可得kp,ki,kd的模糊規則表分別如表2、表3、表4。輸入變量e和ec與輸出變量kp的隸屬度函數如圖8,輸出變量ki和kd的隸屬度函數如圖9。
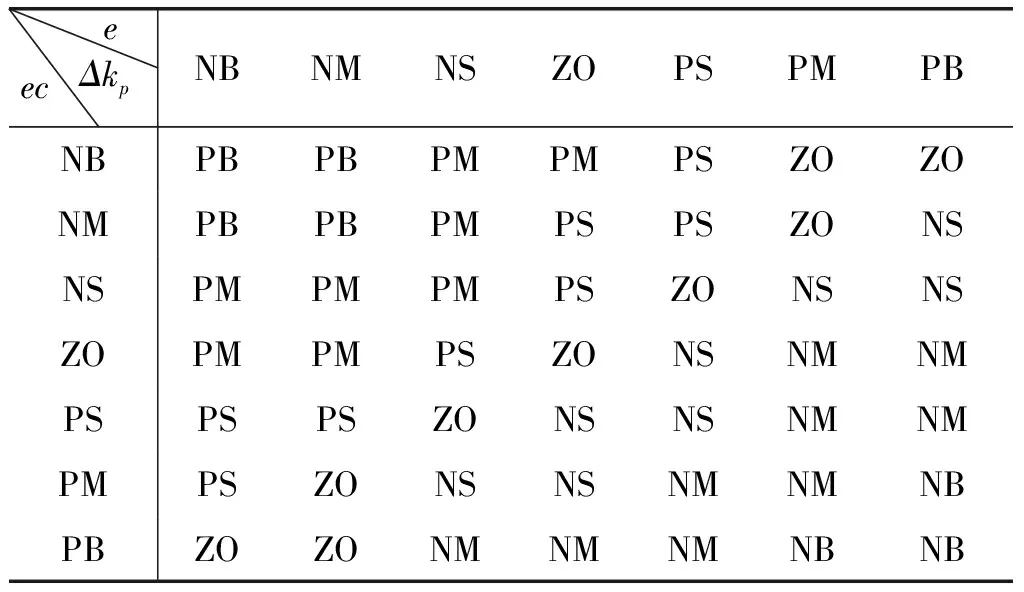
表2Δkp的模糊規則表
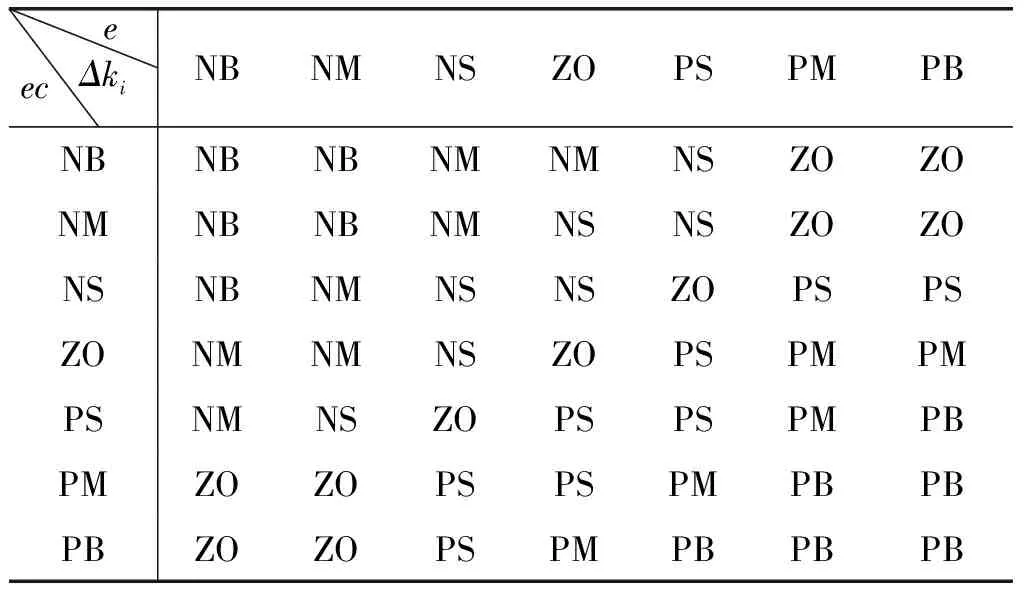
表3Δki的模糊規則表
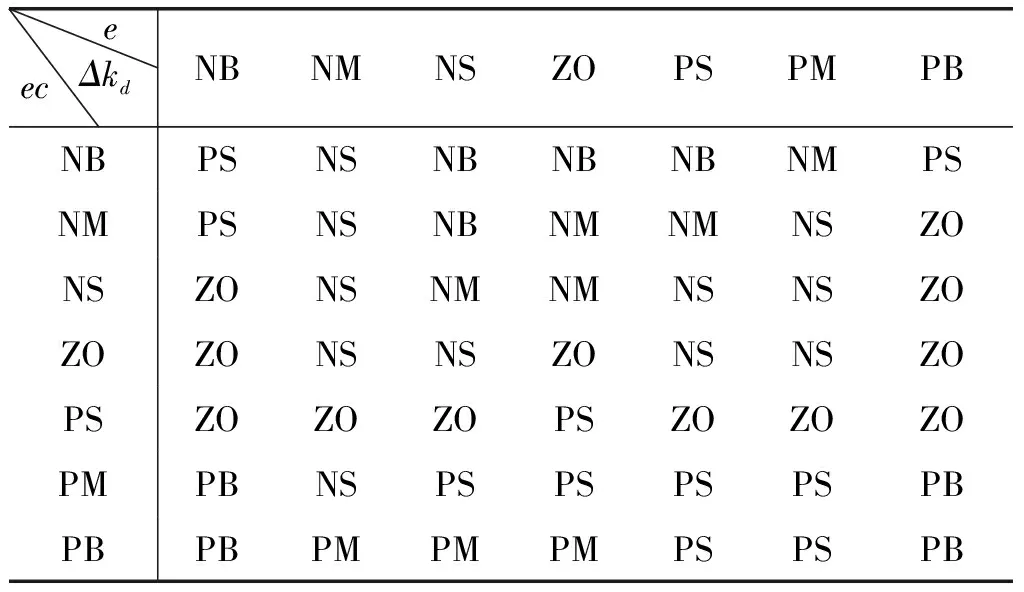
表4Δkd的模糊規則表
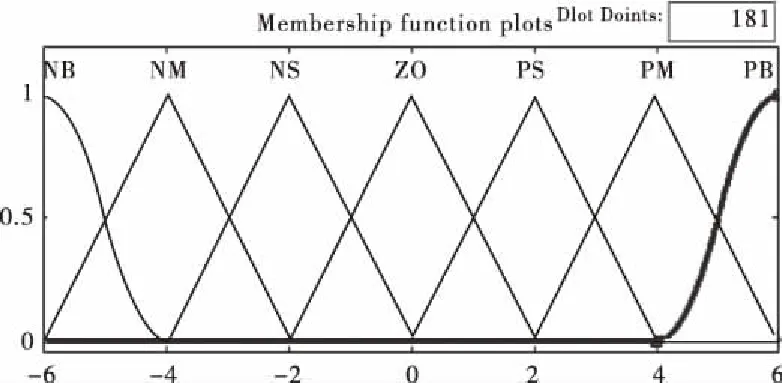
圖8 e、ec、kp的隸屬度函數曲線
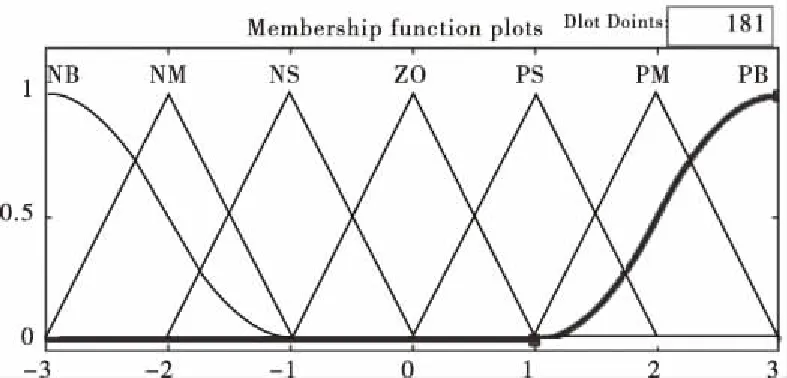
圖9 ki和kd的隸屬度函數曲線
4.2 混合臂高空作業車工作斗調平控制系統仿真
根據混合臂高空作業車工作斗調平控制系統數學模型,建立混合臂高空作業車工作斗調平控制系統的模糊PID仿真模型如圖10,其模糊PID調平控制系統單位階躍響應曲線如圖11。
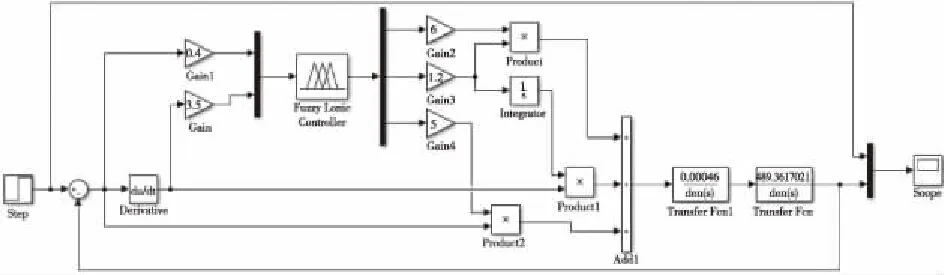
圖10 模糊PID調平控制系統仿真模型
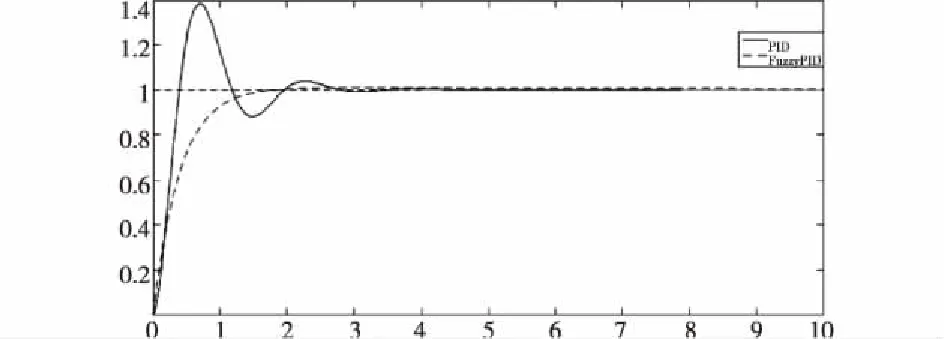
圖11 模糊PID調平控制系統單位階躍響應曲線
4.3 混合臂高空作業車工作斗角度控制系統仿真分析
由圖11可知,模糊PID調平控制系統在2 s以內就能達到穩定,而且沒有超調,而常規PID控制在將近4 s時才能達到穩定,且超調量將近40%,仿真結果表明模糊PID控策略在混合臂高空作業車工作斗調平控制系統性能上優于常規PID控制策略,該模糊PID調平控制系統滿足要求,可用于實際需求。
5 結束語
結合混合臂高空作業車結構及作業特點,提出了基于模糊控制的混合臂高空作業車工作斗調平控制系統,構建出混合臂高空作業車工作斗基于模糊控制的調平控制系統,設計出模糊PID控制器,以保證全舉升空間的調平控制系統性能。采用階躍輸入工況下對混合臂高空作業車工作斗調平控制系統進行仿真研究,仿真結果表明模糊PID控制較常規PID控制快速性、穩定性及精確性高,驗證了基于模糊控制的混合臂高空作業車工作斗調平控制系統的有效性和合理性。
