倉儲物流中自動導引車的路徑規劃研究*
2019-01-03 02:51:04劉敬一孫維堂董君陶
組合機床與自動化加工技術 2018年12期
關鍵詞:規劃
劉敬一,孫維堂,劉 閩,董君陶
(1.中國科學院大學,北京 100049;2.中國科學院 沈陽計算技術研究所 智能控制與裝備部,沈陽 110168;3.沈陽市環境監測中心站 沈陽 110000;4沈陽市第二十七中學 沈陽 110011)
0 引言
隨著柔性制造系統的廣泛應用,國內對自動導引車的需求量也漸漸增長。在整個自動化倉儲物流中,AGV運輸成本占總成本比重較高,倉儲任務的精準調度以及AGV良好的路徑規劃策略,對提高物流作業效率、降低運輸成本有重要意義。
針對多AGV的路徑尋優問題,劉國棟等[1]提出了一種兩階段的交通控制方法來解決AGV路徑沖突問題,王佳溶[2]提出改進型的兩階段控制策略,他們針對任務的優先級未做詳細描述,當任務和車輛非常多時,容易產生任務饑餓;胡彬等[3]提出一種基于時間窗的動態路徑規劃方法,先搜索出備選路徑,然后通過計算和排布時間窗來規避沖突,但提出的時間窗是基于邊的,也就是一條較長車道只能被一臺AGV保留,效率比節點時間窗低。
對AGV路徑規劃中路徑成本最優化以及調度效率問題,提出一種基于優先級隊列和時間窗動態排序的路徑規劃方法。首先構建任務優先級隊列,然后用A-Star算法啟發式搜索路徑,通過對節點時間窗進行精確計算和加鎖,實現了多AGV的路徑實時規劃和動態調優,在無碰撞沖突條件下保證了倉儲物流路徑成本最低,而且提高了系統運行效率。
1 問題描述
1.1 環境地圖
本文所考慮的是自動化倉儲物流中AGV群體運動規則問題,根據其所在的倉儲環境采用拓撲建模法構建地圖,并作以下假設:
(1)相鄰節點間的路線為單行道可雙向行駛。
(2)AGV在4個方向上以同一速度勻速行駛,且轉向速度固定;
(3)AGV間安全制動距離為0.8m;
(4)AGV共有4種狀態:無任務靜止狀態(包括充電狀態),有任務待負載行駛狀態,負載搬運狀態,臨時等待狀態。
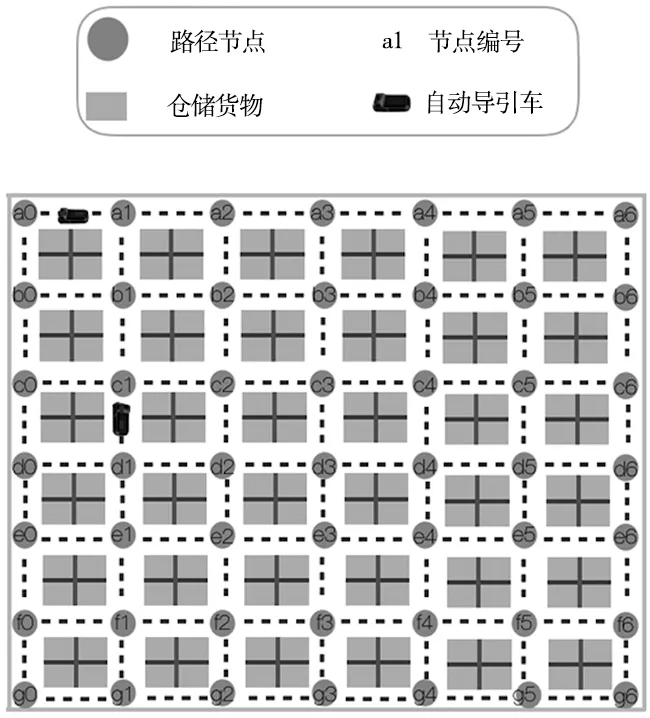
圖1 倉儲環境下拓撲地圖
1.2 目標函數
針對AGV倉儲物流環境,建立拓撲地圖,如圖1所示,在有向連接網絡G=
ey={vp→vq:vp,vq∈V}
(1)
多AGV路徑規劃的目的是規劃出一條時間代價最小的路徑。AGV在倉儲環境中的耗時分為到達裝載點時間,搬運狀態時間和避障等待時間,分別設為的tk、carrytk和Ωk。因此所有AGV的時間代價之和可由以下公式得到:
(2)
其中,k為倉儲任務的編號。
1.3 任務調度
(1)亟待充電且攜帶任務,將已分配的任務作為高優先級重新分配,然后將充電任務作為中優先級重新分配;
(2)亟待充電且無任務無負載,將充電任務作為中優先級重新分配;
(3)一般性實時任務作為低優先級分配;
(4)同一優先級按照FCFS方法分配。
1.4 避障要素
(1)相向相遇沖突。如圖2所示,相向行駛的兩輛車相遇;
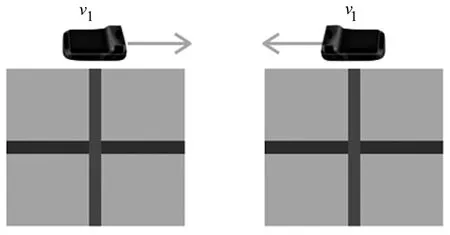
圖2 相向沖突示意圖
(2)垂直相遇沖突。如圖3所示,垂直方向的兩輛車在節點相遇;
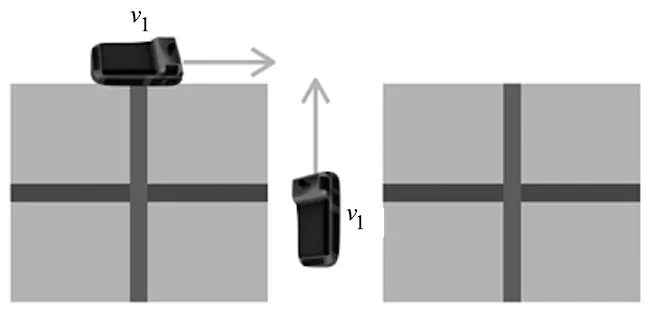
圖3 垂直相遇沖突示意圖
(3)占位沖突(車輛空閑)。如圖4所示,前方因AGV空閑停車阻止了其他車的前進。
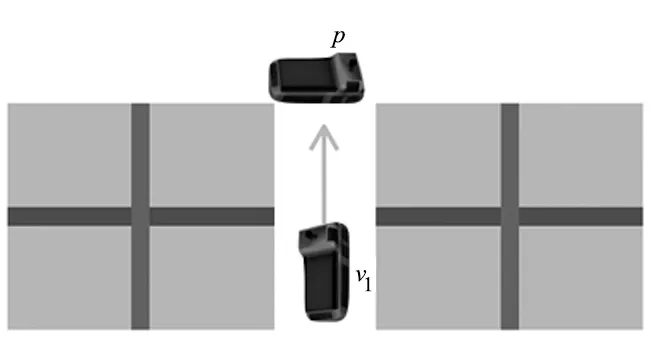
圖4 占位沖突1示意圖
(4)占位沖突(故障)。如圖5所示,前方因故障停車阻止了其他車的前進。
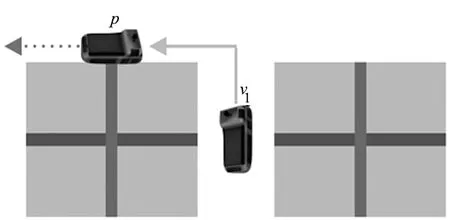
圖5 占位沖突2示意圖
(5)追尾沖突(超速)。如圖6所示,即將趕超。
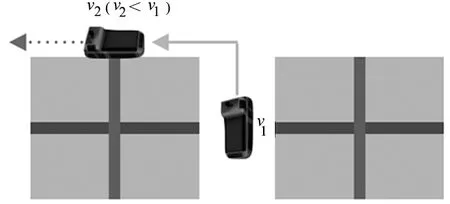
圖6 追尾沖突示意圖
2 基于時間窗的避障路線規劃法
2.1 時間窗定義
如圖1所示,在有向連接網絡G=(V,E)中,假設有x輛車參與任務執行,那么任務的AGV集合為A={a1,a2,…,ax}。所有任務的起點、終點都不同,那么任務的起點集合和終點的集合分別記為S和D,且S?V,D?V。那么自動導引車所經過節點的時間窗可以定義為:
(3)


圖7 節點保留時間窗模型圖
2.2 時間窗計算
為了保障倉儲物流過程的安全性,需要對時間窗進行精準計算,如圖7所示。設AGV到達節點i的時間為ti,則有公式:
(4)
其中,tb為車輛安全制動時間,te為允許最大誤差時間,包括在節點處突發斷電及故障引起的制動誤差。
如圖8所示,設AGV車身的長度為l,AGV直行通過節點時,則有公式:
(5)
其中,vst是小車統一默認的直行速度。
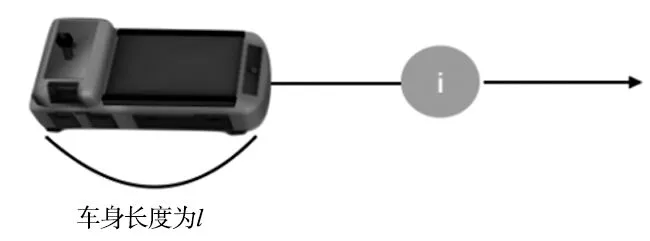
圖8 自動導引車通過節點i示意圖
如圖9所示,當AGV在節點處轉彎時,則有:
(6)
其中,vtu是小車轉彎通過節點的速度。
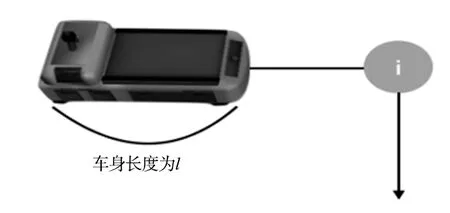
圖9 自動導引車轉彎通過節點i示意圖
2.3 AGV最優路徑規劃算法
在進行多AGV路徑尋優時,采用拓撲建模法構建倉儲電子地圖,且攜帶任務的AGV在運行過程中可雙向行駛。將一個倉儲搬運任務定義為:
carryk(t)={PQk(t),btk,Sk,Dk,LBk(t)}
(7)
其中,PQk表示第k個任務的實時優先級,參數越大優先級越低;btk表示第k個任務的開始時間;Sk和Dk分別表示第k個任務的裝載點和卸載點,且Sk∈V、Dk∈V;枚舉類型的參數LBk(t)表示第k個任務的搬運狀態,如公式(8)所示。
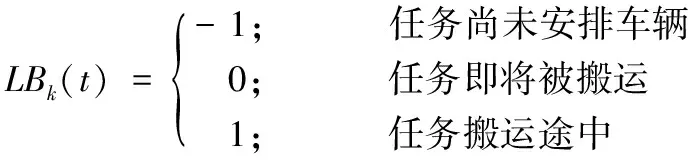
(8)
給任務分配不同的優先級PQ:如圖10所示,將任務隊列劃分為高中低三個優先級隊列,分別用PQh、PQm和PQl來表示。
(1)當LBk(t)=0時,小車正在去裝載點的路途中,即當有任務無負載的AGV小車亟待充電或突發斷電等故障時,已安排的任務的需要重新分配,將該任務carryk(t)放入高優先級隊列,將充電或維修任務放入中優先級隊列;
(2)當LBk(t)=1時,AGV在裝載點Sk和目的地Dk之間,即有任務有負載的AGV亟待充電或突發斷電等故障時,已安排的任務的需要重新初始化,因為裝載點Sk已經改變,然后將新任務carryk(t)放入高優先級隊列,將充電或維修任務放入中優先級隊列;
(3) 把一般性實時任務放入低優先級隊列。
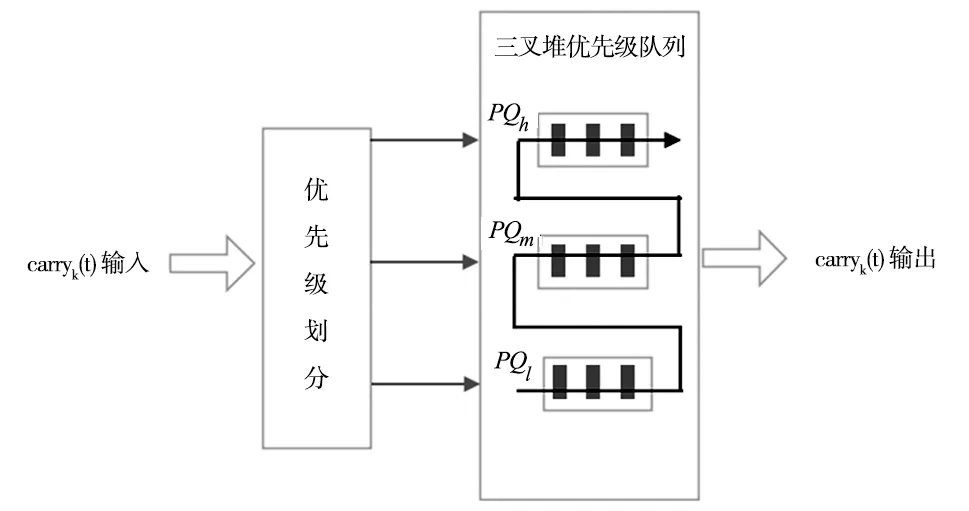
圖10 三叉堆優先級隊列示意圖

體現在沖突一:后續的長任務需要不斷地尋找次優路線;體現在沖突二:后續的長任務需要不斷地負載等待。二者都容易造成任務饑餓,會降低調度系統的效率。
我們有了任務的優先級分配和時間窗的計算,下面來介紹路徑規劃算法的具體實現步驟,如圖11所示。
(1)根據上位機系統管理員輸入倉儲物流參數,將任務劃分優先級,插入優先級隊列,并初始化多個運輸任務,carryk(t)={PQk(t),btk,Sk,Dk,LBk(t)}。
(2)按照任務的優先級順序進行車輛調度:選用離裝載點[6]最近的空閑AGV來執行任務。
(3)用A-Star算法對路徑進行啟發式搜索,得到臨時的最短行駛路徑。

(5)初始化節點時間窗Wk,如果存在任務p和q使Wp∩Wq≠?,說明節點時間窗因尚未加鎖而出現重疊現象,即在的某個保留時間窗內出現了其他車輛[7]。
(6)根據重疊時間窗和拓撲地圖,來確定將會發生哪種節點沖突,然后對每個節點的時間窗加鎖。如果存在如圖2所示的沖突一相向相遇沖突[8],選擇PQk(t)較大的任務重新調度,由于根據啟發式算法規劃的臨時最優路線會出現碰撞[9],因此需要繼續搜索次優路徑,返回執行步驟(3),若最后所有路線都會出現沖突一,那么返回執行步驟(2)更換AGV車輛;如果沖突類型只剩沖突二垂直相遇沖突[10],那么攜帶低優先級任務的AGV原地等待一個節點時間窗的時間,直到重疊窗口消失;如果兩種沖突都存在,則先按照相向相遇沖突處理。
(7)生成可執行任務(指定AGV,明確路線),AGV執行完任務空閑后,由于該AGV可能成為其他任務的障礙,所以要優先派發該車輛。重復執行步驟(1)等待管理員動態分發新需求。
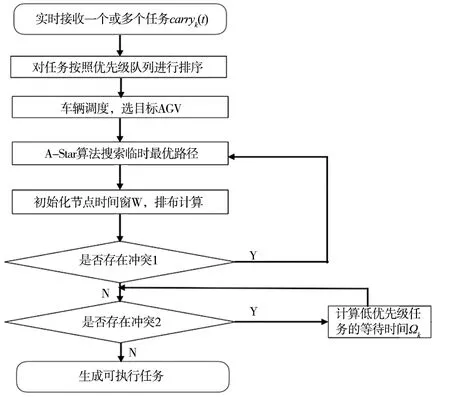
圖11 AGV路徑規劃算法流程圖
考慮其他三種沖突,任務執行過程中,對于沖突三,那么將更改此空閑AGV所占有的節點周圍四條邊的權重為無窮大,修改任務的起始點,執行算法中的步驟(3);對于沖突四,可能為突發斷電(非亟待充電提醒)或機械老化等故障,需要人工維修或清除,然后更新可用AGV信息;對于沖突五,由于環境中假設AGV速度相同,所以不會出現趕超沖突,即使在前面的AGV制動減速的時候也不會出現趕超沖突,因為在計算時間窗時,AGV制動時間tb已經被保留在時間窗內。
3 算法仿真驗證
使用 Visual Studio 2015作為仿真開發平臺,編寫調度程序對提出的路徑尋優算法進行驗證。選取某倉儲物流中心如圖1拓撲地圖所示,倉儲區域長30m,寬30m,倉儲節點36(不包括充電區域),144個貨架,14條車道縱橫交錯,AGV直行速度為0.5m/s。轉向時間固定為2s。
設計兩組仿真對比實驗:一組是無時間窗加鎖和有時間窗加鎖的路徑尋優結果,另一組是不含優先級隊列和含優先級隊列的路徑尋優結果。從兩個維度來驗證所提出算法的可行性和高效性。
(1)針對第一種仿真對比實驗,我們分別初始化三個任務:
carry1(t)={1,0,a1,c5, -1}。
carry2(t)={2,0,g3,b3, -1}。
carry3(t)={3,0,e1,b2, -1}。
首先根據任務的預估時間來初始化優先級,時間越長,PQk(t)數字越小,優先級越高。
無時間窗加鎖的情況如圖12所示,執行任務carry1(t)的車輛將會與執行carry3(t)的車輛在b1到c1路段發生相向相遇沖突,執行任務carry1(t)的車輛將會與執行carry2(t)的車輛在c3節點發生垂直相遇沖突[11];
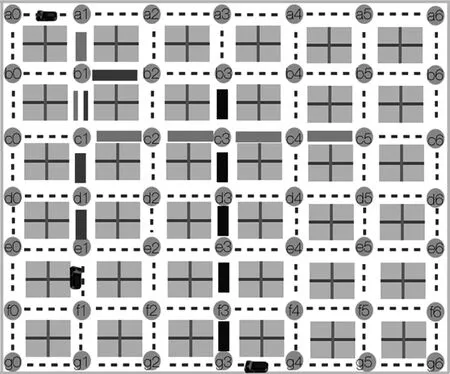
圖12 無時間窗加鎖含優先級路徑尋優結果
含時間窗加鎖的情況如圖13所示,由于經過時間窗的重新排布,任務carry3(t)已經重新規劃路線,有效避免與任務carry1(t)相向相遇沖突,且在節點c2進行等待規避,避免垂直相遇沖突,任務carry3(t)將會在節點c3處進行規避等待,有效避免死鎖和碰撞[12]。
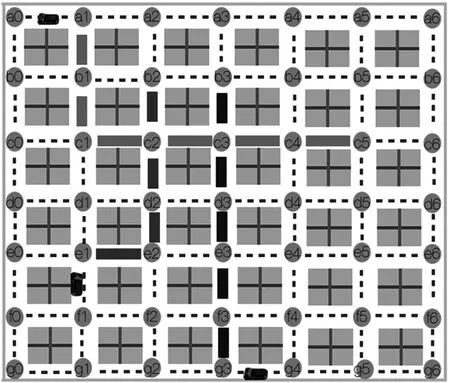
圖13 含時間窗加鎖含優先級路徑尋優結果
(2)針對第二種仿真對比實驗,在不含優先級的算法中我們分別初始化三個任務,這里PQk(t)均為1,即:
carry1(t)={1,0,a1,c5, -1}。
carry2(t)={1,0,g3,b3, -1}。
carry3(t)={1,0,e1,b2, -1}。
算法執行過程如圖14所示。
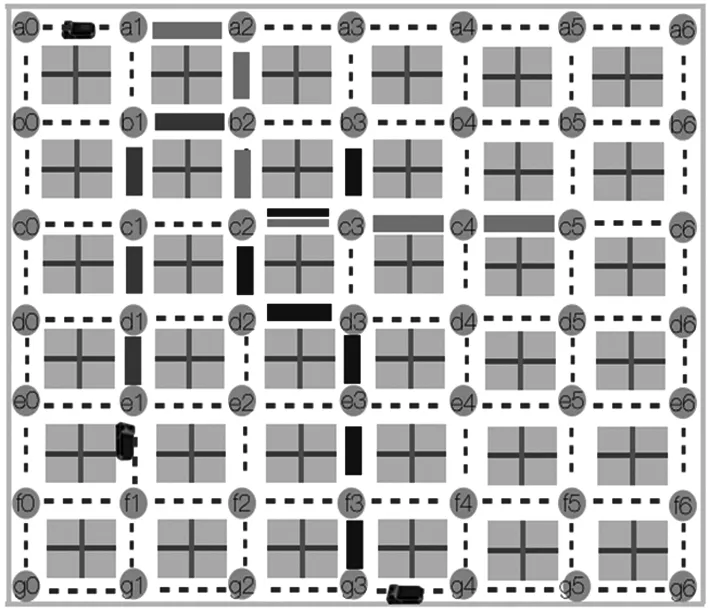
圖14 含時間窗加鎖不含優先級路徑尋優結果
考慮圖13和圖14所示的兩種仿真執行過程,對不含優先級和含優先級的兩種調度算法進行路徑代價對比,如表1和表2所示。根據目標函數公式計算出:含優先級的調度算法路徑成本Cost小于不含優先級的調度算法。
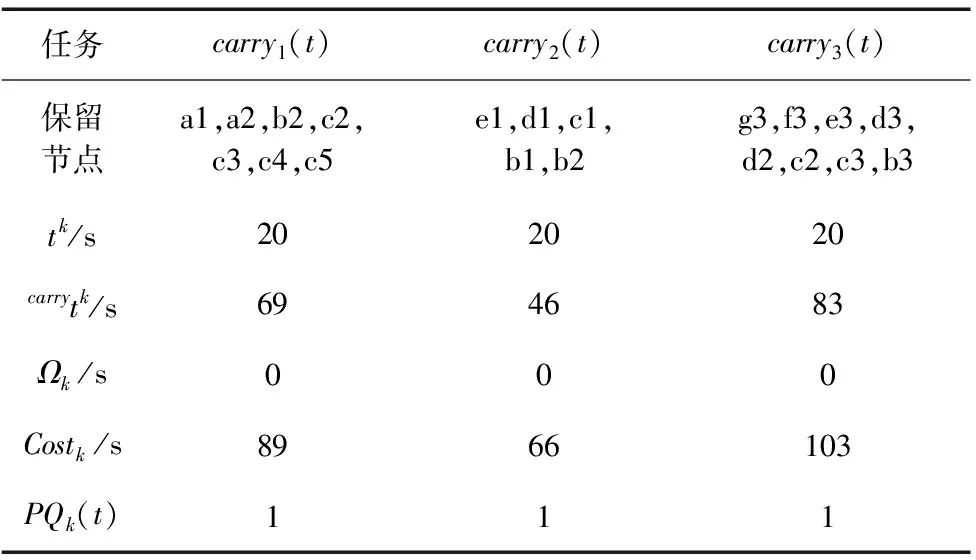
表1 不含優先級隊列的調度算法執行分析
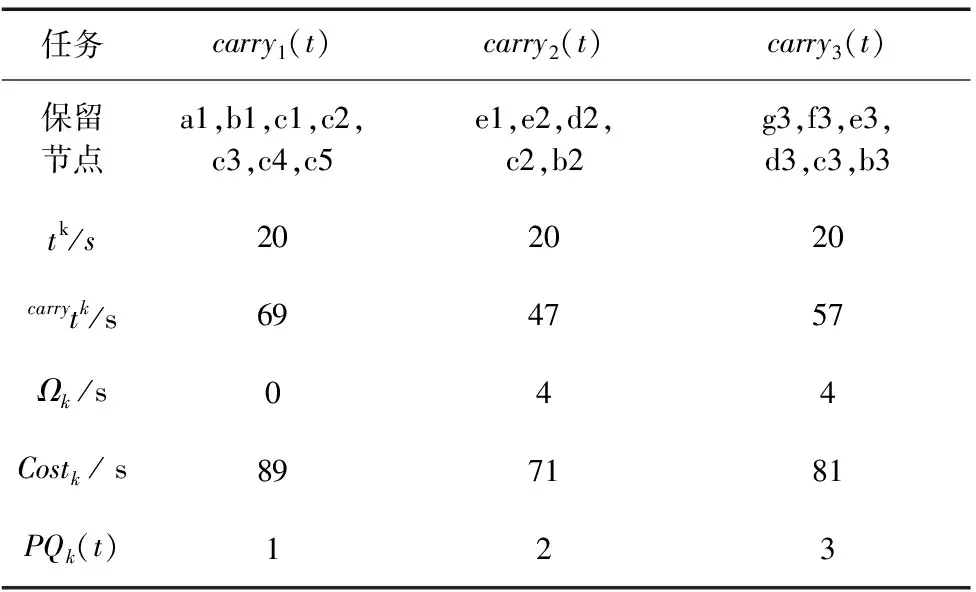
表2 含優先級隊列的調度算法執行分析
4 結論
對多AGV路徑尋優和調度效率問題,提出基于優先級隊列和時間窗模型的調度算法。在多AGV動態路徑尋優中,解決了多AGV的碰撞沖突問題,而且通過構建任務優先級隊列優先級優化了調度順序,不僅保證了路徑最優,而且可以避免任務饑餓與死鎖。最后通過仿真實驗得出,算法在保證車輛無碰撞的條件下可使AGV路徑成本最低,同時提高了任務和車輛調度的效率。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
