彈道導彈過關機點狀態估計方法研究*
2018-12-28 04:36:36杜廣洋鄭學合
現代防御技術 2018年6期
杜廣洋,鄭學合
(1. 北京電子工程總體研究所,北京 100854;2. 中國航天科工集團有限公司 第二研究院,北京 100854)
0 引言
對彈道導彈目標探測跟蹤信息的運用是彈道導彈防御的基礎。當雷達對彈道導彈目標進行跟蹤時,主動段和自由飛行段的運動學模型差別很大,文獻[1-4]采用不同的彈道導彈助推運動模型進行跟蹤,文獻[5-7]研究了雷達跟蹤彈道導彈自由飛行段問題。很難用單個的數學模型來描述這2個運動階段,因此文獻[8-10]提出利用交互式多模型(IMM)方法,多濾波器之間通過模型概率更新實現對目標的自適狀態估計,同時利用模型概率實現了對過關機點狀態的估計。但是,交互式多模型方法計算復雜,并且與雷達探測耦合緊密,難以在類似指控中心這樣的信息綜合處理機構實現。根據彈道導彈防御的需要,除了要求進行穩定跟蹤外,還希望能夠利用雷達跟蹤信息完成對導彈精密軌跡、彈道參數、識別信息等的估計。因此,對導彈過關機點狀態的準確及時估計,對于跟蹤信息處理方式的切換意義重大。
本文從指控信息處理中心的應用出發,基于雷達跟蹤信息,提出將推力加速度作為特征量估計導彈過關機點狀態,并推導了觀測方程。針對觀測方程非線性問題,通過對多個隨機變量的線性化,利用遞推最小二乘(RLS)算法獲得了推力加速度的遞推估計。通過誤差分析,給出了過關機點狀態估計門限計算方法。仿真表明,該估計方法能夠給出比較理想的過關機點狀態估計結果。
1 彈道導彈過關機點狀態的特征量
1.1 推力加速度特征量分析

1.2 觀測方程
本節將根據雷達跟蹤信息推導推力加速度狀態的觀測方程。

(1)
式中:μ=3.986 004 418×1014(m3·s-2)為地球引力常數。
對式(1)求時間微分可得能量的質量/時間密度為

(2)
文獻[9]通過推力和阻力參量敏感度分析得出結論,與推力相比,阻力的敏感度較低,作用可忽略。所以,式(2)可近似為Emt≈vTap,即向量v與向量ap的內積。設向量v與向量ap的夾角為α,即攻角,那么導彈完成程序轉彎后,推力加速的導彈一般攻角α控制得很小,推力的方向可近似為沿著導彈的速度方向[12],即α≈0。通過這2次近似,式(2)可化簡為
(3)
為了求取能量的質量/時間密度Emt,取當前時刻前n組數據,則其等間隔線性最小二乘擬合解為
(4)
式中:Δt為數據采樣間隔。
將式(4)帶入式(3)即為推力加速度的觀測方程為
(5)
根據雷達輸入的位置、速度信息,利用式(5)和式(4)即可計算當前時刻的推力加速度。從形式上看,推力加速度狀態量可以看做是能量的質量/時間/速度密度。
2 推力加速度的估計
2.1 觀測方程的線性化
(6)
(7)
式(7)就是線性化后的推力加速度觀測方程。

,
(8)
2.2 推力加速度的最小二乘估計及其遞推公式

(9)
為了方便在指控中心計算,下面給出遞推最小二乘(RLS)公式[14]為
(10)

3 過關機點狀態檢測門限選取
在關機時刻前后,推力加速度ap的退出帶來的運動狀態發生顯著變化,因此可以通過選取適當的檢測門限判斷彈道導彈目標是否過了關機點。推力加速度的估計過程中產生的估計誤差主要包括2項:①線性化引入的誤差;②最小二乘估計誤差。其他如推力方向與速度方向重合近似等帶來的誤差均可忽略不計。
(11)
(12)
將式(11)和式(12)合成為推力加速度估計誤差為
(13)
式中:
(14)
一般雷達報送指控的位置與速度均為估計結果,且具有較強的相關性,工程上為了計算方便,忽略相關項(相當于誤差容限放大),則過關機點狀態檢測門限取為
(15)
式中:α為誤差放大系數。
4 仿真分析
利用典型6 00 km,3 000 km射程彈道導彈理論彈道,通過仿真檢驗本文闡述的彈道導彈過關機點狀態估計方法的有效性。雷達向指控信息處理中心報送的狀態量為具有一定相關性位置和速度信息。指控信息處理中心根據雷達觀測結果估計彈道導彈目標的過關機點狀態。仿真參數見表1所示。
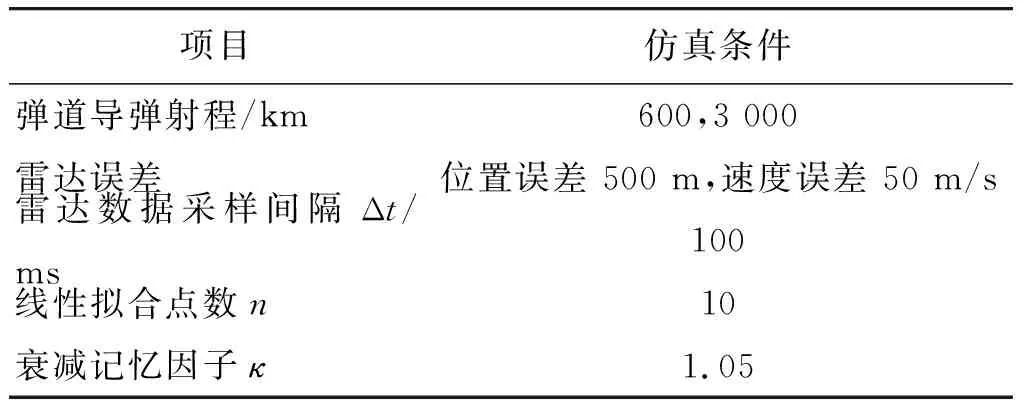
表1 仿真參數
根據雷達報送的觀測結果,分別計算2種射程下的彈道導彈目標的能量信息,包括:①能量的質量密度;②能量的質量/時間密度;③能量的質量/時間/速度密度。仿真結果見圖2。由圖2a)和圖2b)可見,2種射程下能量的質量密度和能量的質量/時間密度差別都很大,在未知射程的情況下,很難根據雷達的探測誤差能力給出統一的判決門限,從而有效區分是否過關機點狀態。由圖2c)可見,在自由飛行段,不同射程下的能量的質量/時間/速度密度觀測結果是趨于一致的,這就為根據雷達的探測誤差能力給出統一的判決門限創造了良好的條件。根據本文式(3)的論述,能量的質量/時間/速度密度可近似為推力加速度。仿真結果證實了本文將推力加速度作為判斷過關機點狀態特征量的正確性。
利用本文提出的推力加速度的估計方法和檢測門限的選取方法,對表1仿真參數下的2種射程進行了仿真。仿真結果見圖3。圖3中,橫坐標為彈道導彈發射時間,縱軸為推力加速度。利用雷達跟蹤的位置與速度信息,導出推力加速度特征量,如圖3綠色曲線所示。從彈道導彈發射起始直到自由飛行段,對雷達觀測導出特征量進行RLS遞推估計,結果如圖3黑色曲線所示。實時檢測門限如圖3紅色曲線所示。從仿真結果可見:在2種射程條件下,利用雷達觀測對推力加速度的實時估計結果與真值吻合程度較好,檢測門限選取合理,過關機點狀態區分度較好,彈道彈道關機后2 s給出了過關機點狀態變化估計結果。這一滯后時間與雷達輸入的觀測誤差和數據率有關系,觀測誤差越小、數據率越高,檢測滯后時間越短。
從圖3仿真結果可見,在彈道導彈初始加速段,由于推力加速度尚處于較低水平,其真值低于觀測誤差,因此檢測門限失效。對于初始加速段,本文討論的方法已不再適用。雷達觀測誤差大小影響體現為不滿足條件的海拔高度不同。在此海拔高度以下,該觀測精度的雷達將無法準確判斷關機狀態。
5 結束語
本文提出了一種利用雷達跟蹤信息對推力加速度特征量進行估計,從而進行過關機點狀態檢測的方法。相比于并行多模型方法,利用本文方法給出的狀態檢測結果進行跟蹤信息處理方式的切換,極大簡化了處理結構和運算量,更容易在指控信息處理中心實現。仿真表明,該估計方法給出了比較理想的過關機點狀態估計結果。
