電動車用電機式主動穩定桿多模式控制策略研究
2018-12-19 05:05:50皮大偉王洪亮李育龍
中國機械工程 2018年23期
關鍵詞:系統
李 姣 皮大偉 王洪亮 李育龍
南京理工大學機械工程學院,南京,210094
0 引言
為了防止車輛側翻,目前車輛上都安裝有被動式橫向穩定桿,當車輛在極限轉向工況以及不平路面上高速行駛時,穩定桿能夠提供反側傾力矩以抑制車身側傾。一般為了提高車輛轉彎時的操縱穩定性,傾向于選擇剛度較大的穩定桿,而為了提高行駛平順性,傾向于選擇剛度較小的穩定桿[1]。顯然,傳統的被動式穩定桿無法同時滿足兩方面的需求,而近幾年汽車主動安全領域研究的主動穩定桿,在原有被動式穩定桿的基礎上引入了主動控制系統以及作動器,實現了“剛度可變”。根據作動器的不同,主動穩定桿可分為液壓式和電機式兩類。液壓式主動穩定桿存在結構復雜、響應慢和能耗大,以及密封易泄漏等問題,而電機式主動穩定桿系統具有響應速度快、集成度高、質量功率比大等優點[2]。
目前,國內外學者通過分析車輛的側傾動力學特性,針對主動穩定桿系統設計了一系列主動側傾控制算法,分別有PID控制[3]、模糊PID[4]、最優控制[5-6]、魯棒控制[7]、滑模控制[8]以及PID+前饋控制算法[9]等,并且通過仿真實驗驗證了這些算法能有效提升車輛的側傾穩定性及乘坐舒適性。同時,為了進一步提升車輛的動力學特性,有些學者還提出主動穩定桿系統與其他車輛系統的集成控制,如周兵等[10]、呂緒寧[11]提出的主動懸架與主動橫向穩定桿的集成控制以及汽車主動橫向穩定桿與主動前輪轉向協調控制。以上研究都是基于車輛處于側傾狀態下,提升車輛的側傾穩定性及乘坐舒適性,而車輛實際行駛過程中,路面及車身等情況都在不斷地變化,加上穩定桿本身的性能限制,為了同時滿足乘坐舒適性及側傾穩定性,穩定桿難以達到每個范圍內的理想工作狀態。
本文以電機式主動穩定桿為研究對象,根據車輛實際行駛過程中的不同工況,提出了電機式主動穩定桿的三種工作模式,當傳感器檢測出車輛運行狀態后,輸出控制信號給電機作動器,使電機按照相應的工作模式工作,從而實現不同行駛工況下同時兼顧車輛的側傾穩定性和行駛平順性,并通過仿真驗證了該控制策略的有效性。
1 電機式主動穩定桿結構組成及工作原理
電機式主動穩定桿由左右穩定桿、電機作動器、減速機構、控制器和傳感器組成。傳感器采集車輛的狀態信號并傳遞給電子控制單元(electronic control unit, ECU),ECU根據這些狀態信號計算并輸出控制信號,使電機按照相應的要求轉動,電機輸出軸的旋轉運動通過減速機構傳遞到穩定桿上,引起左右穩定桿的相對扭轉,產生附加的反側傾力矩并作用到車身上,以抑制車身的側傾。電機式主動穩定桿系統的結構見圖1。
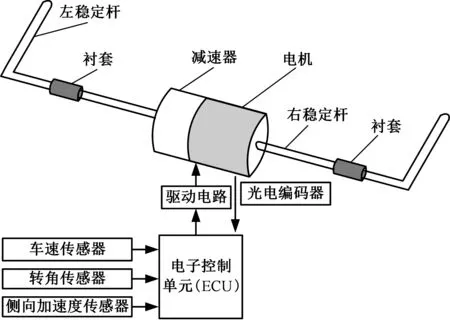
圖1 電機式主動穩定桿系統的結構組成Fig.1 The structure of the electric active stabilizer bar system
2 系統模型的建立
2.1 車輛系統模型
采用ISO坐標系,以車輛質心為坐標原點,車輛(與地面平行)前進方向為x軸正方向,水平面內x軸逆時針旋轉90°得到的方向為y軸正方向,通過質心豎直向上的方向為z軸方向[12]。基于上述坐標系,建立了14自由度整車動力學模型[13],包括4個車輪的垂向與旋轉運動,以及車身的縱向、側向、垂向、側傾、俯仰、橫擺運動,如圖2所示。
縱向運動:

圖2 14自由度車輛系統模型Fig.2 14 degree of freedom vehicle model
(1)
側向運動:

(2)
垂向運動:
(3)
側傾運動:
(4)
橫擺運動:

(5)
俯仰運動:

(6)
4個車輪的旋轉運動:
(7)
4個車輪的垂向運動:
(8)

為了描述四個車輪處的路面高程,利用濾波白噪聲法建立四輪非平穩路面時域模型,以模擬不平路面對車輛的激勵輸入[14]。
2.2 電機作動器模型
本文電機作動器選用永磁直流無刷電機,永磁直流無刷電機的電壓平衡方程[15]如下:
(9)
式中,ea、eb、ec為定子繞組相電動勢;ua、ub、uc為定子繞組相電壓;ia、ib、ic為定子繞組相電流;L為每相繞組的自感;M為每兩相繞組間的互感;R為每相繞組的電阻。
定子繞組產生的電磁轉矩為
(10)
式中,ω為電機的旋轉角速度。
負載平衡方程為
(11)
式中,B為阻尼系數;J為電機轉動慣量;Tl為負載轉矩。
上層控制器以車身側傾角為控制目標,采用滑模控制算法計算出反側傾力矩值MARC。由于電機的旋轉運動通過減速器帶動左右穩定桿發生相對轉動,為了準確地描述電機執行器的輸出特性,給出電機式主動穩定桿的受力原理,見圖3。
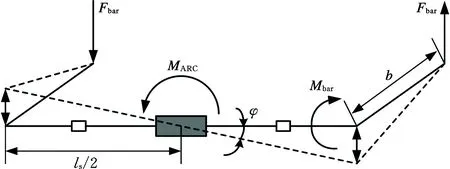
圖3 電機式主動穩定桿系統的受力原理圖Fig.3 Force principle of the electric active stabilizer bar system
根據受力平衡原理,電機驅動器輸出力矩Mbar與反側傾力矩MARC的關系為
(12)
(13)
式中,Fbar為連桿作用于主動穩定桿的力;ls為穩定桿長度;b為穩定桿力臂長度。
考慮到減速機構的傳動比j,電機驅動器的輸出力矩Mbar為
Mbar=jTe
(14)
可以計算得到電機的目標轉角為
(15)
式中,θbar為左右穩定桿的相對扭轉角度;kbar為左右穩定桿的扭轉角剛度。
3 多模式控制策略設計
3.1 控制策略的制定
將側向加速度傳感器、側傾角傳感器、車速傳感器、轉角傳感器以及傾角傳感器采集到的車輛狀態信號輸入到控制器ECU的輸入端,控制器根據輸入信號判斷車輛處于哪種行駛工況,從而選擇系統的工作模式,計算得出控制信號,將控制信號輸入給驅動電路以驅動電機的運轉。為了使控制器更準確地控制,在實際行駛過程中,將外部條件通過數值進行定量的描述。
車輛在直線行駛過程中,轉向盤會有微小的角度調整,前輪轉角|δ|≤10°,設置車輛在幅值為10°的正弦角輸入、C級路面激勵下,車輛的側傾角及側向加速度曲線如圖4所示,即側傾角|φ|≤0.7°,側向加速度|ay|≤0.06g。
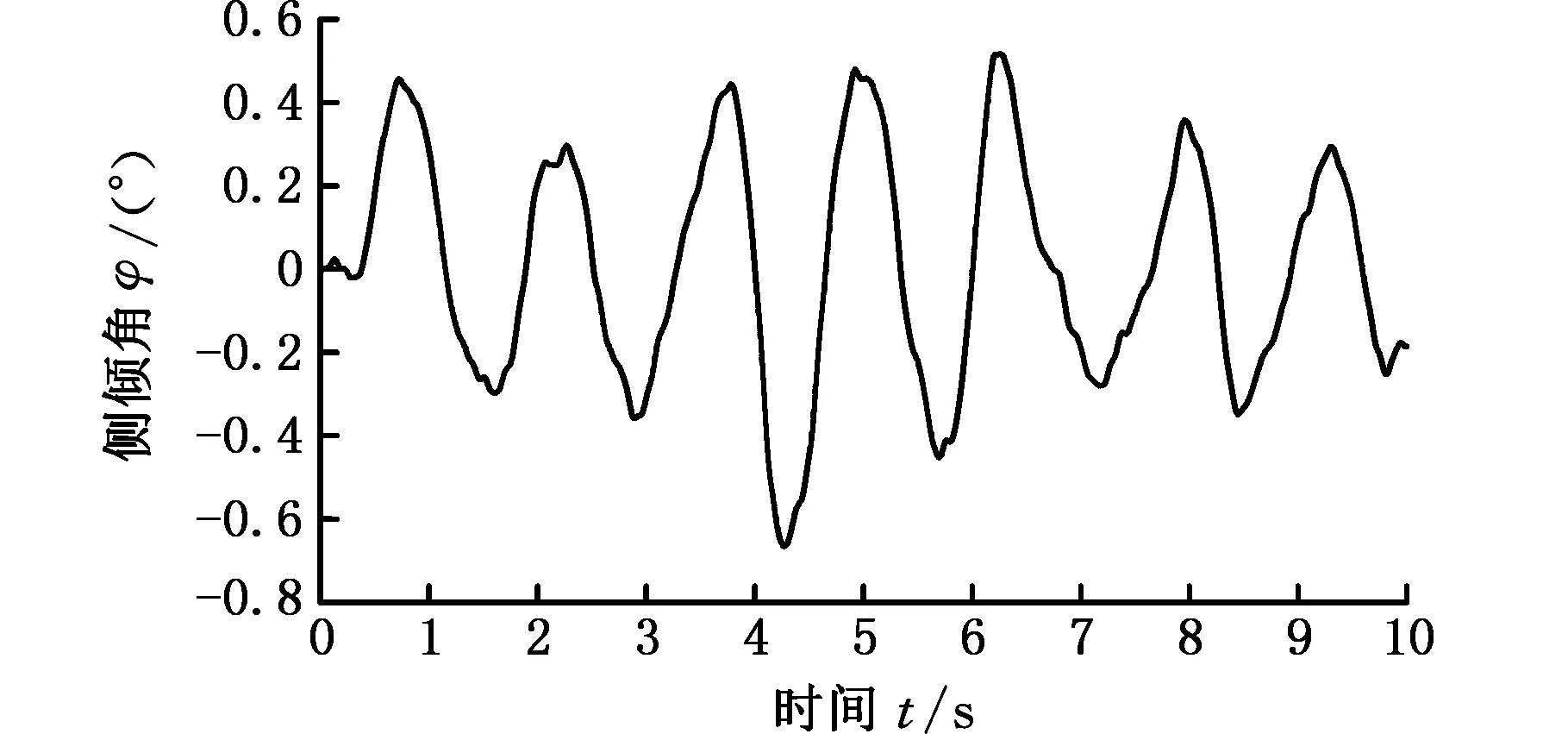
(a)側傾角
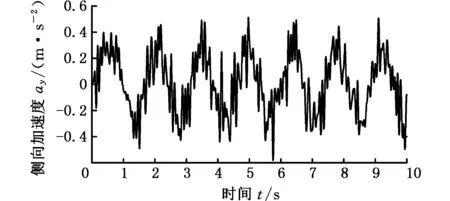
(b)側向加速度圖4 直線行駛響應曲線Fig.4 The response curve of straight driving
當車輛轉向行駛時,車輛的側向加速度會引起車輛側傾,引入車輛側傾模型,可得
Kφφ-ms(aycosφ+gsinφ)hr+MASB=0
(16)
式中,Kφ為車身側傾角剛度;MASB為主動穩定桿系統需提供的反側傾力矩。
在安裝傳統被動式穩定桿的條件下,車輛的側向加速度和側傾角關系曲線如圖5所示。文獻[16]根據大量的實車實驗數據得出實車的側向加速度絕大部分處于0~5.5 m/s2之間,因此,對應的車身側傾角應控制在-3°~3°之間。
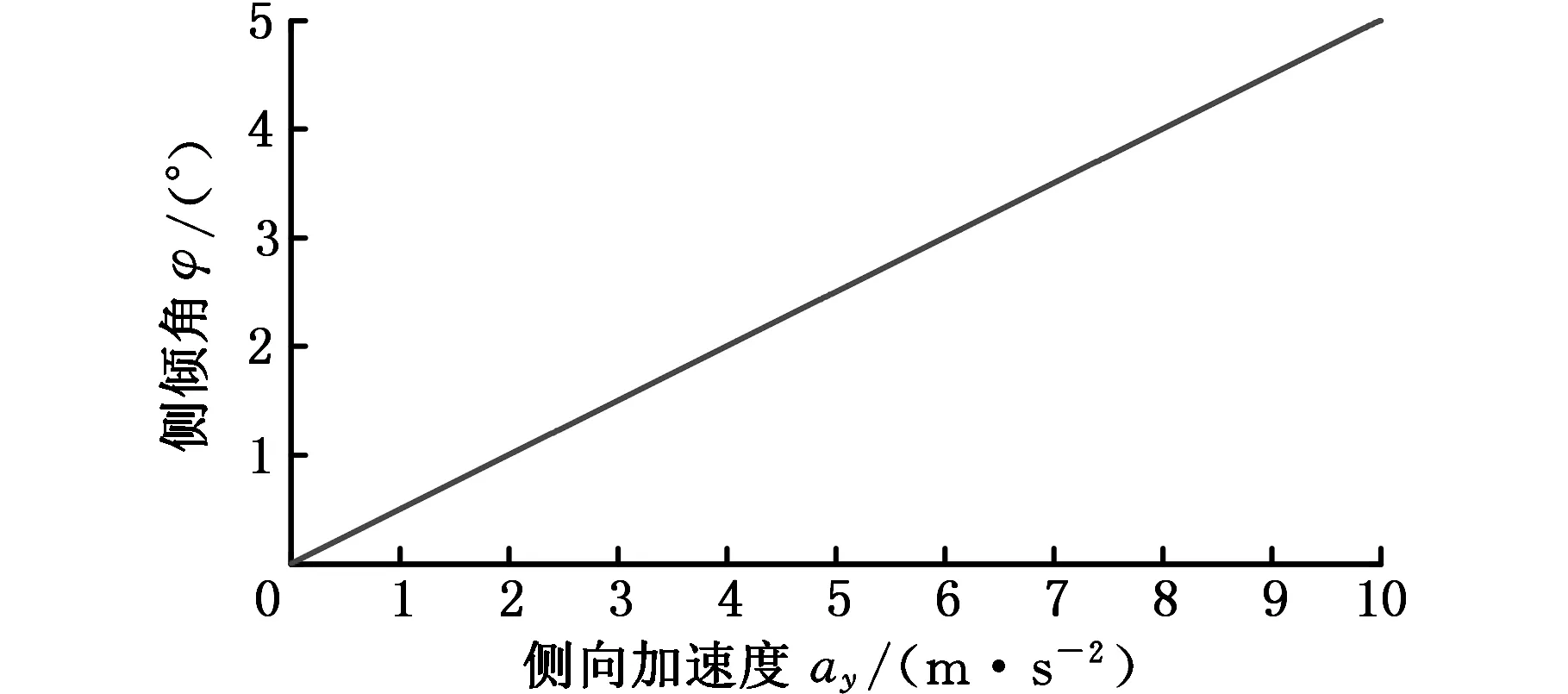
圖5 側向加速度與側傾角關系曲線Fig.5 Relation curve between lateral acceleration and roll angle
根據以上分析,針對電機式主動穩定桿設計合適的控制規律。判定條件如下:
(1)當控制器檢測到側傾角|φ|≤0.7°且|ay|≤0.06g時,可判斷車輛處于水平良好的路面上直線平穩行駛,可選擇工作模式一。
(2)當控制器檢測到側傾角|φ|>0.7°且側向加速度|ay|>0.06g時,可判斷車輛處于轉向行駛或者不平路面行駛階段,選擇工作模式二。
(3)當系統發生故障,即控制器接收不到信號時,選擇工作模式三。
控制單元的判斷流程見圖6。
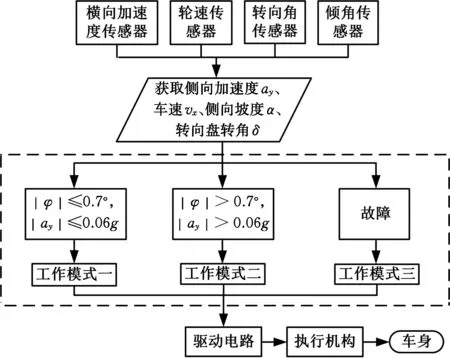
圖6 控制單元判斷流程圖Fig.6 The judgment flow diagram of the electronic control unit
3.2 不同工作模式
3.2.1工作模式一
當車輛在水平路面上直線平穩行駛時,此時車輛的側傾幅度較小,穩定桿不需要提供反側傾力矩來抑制側傾,為了提高車輛的乘坐舒適性,系統不需要工作。永磁直流無刷電機驅動電路等效圖(圖7)中,只需PWM六路控制信號全為0,通過硬件電路實現開路,使電機自由轉動,主動穩定桿兩端處于斷開狀態,此時,控制系統仍處于待機狀態,隨時監控車輛行駛狀態并反饋給控制器。
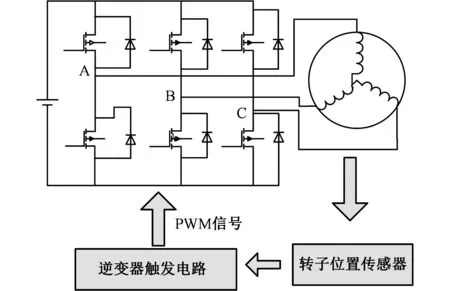
圖7 永磁直流無刷電機驅動電路等效圖Fig.7 The drive circuit equivalent chart of permanent magnet DC brushless motor
3.2.2工作模式二
當車輛車速在不平路面以及轉彎行駛時,車輛易發生側傾,過度的側傾易導致側翻。為了同時兼顧車輛的乘坐舒適性以及操縱穩定性,系統選擇工作模式二,即電機式主動穩定桿系統正常工作。將傳感器采集到的信號輸入到控制器ECU輸入端,控制器采用分層控制算法,上層控制器在獲取各類車輛狀態信號(車速、前輪轉角、側向加速度和側傾角)后,首先將側向加速度換算為車身側傾角的目標值,然后以側傾角為控制目標,采用滑模控制算法計算出抑制車輛側傾所需的反側傾力矩值,底層控制器為電機控制器,將上層計算出的反側傾力矩通過關系轉換為電機的目標轉角,最后將電機產生的轉矩輸出到整車模型中。傳感器隨時監控并采集車輛的狀態信息,實時調整輸出力矩的大小,實現車輛的主動側傾控制,控制原理見圖8。
其中,滑模控制器的輸出為

圖8 電機式主動穩定桿系統的控制原理圖Fig.8 The control schematic diagram of the electric active stabilizer bar system
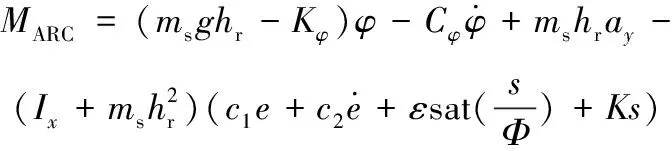
(17)
ε>0,K>0
式中,Cφ為車身側傾角阻尼系數;sat(·)為飽和函數;Φ為邊界層厚度;c1、c2分別為用以減小穩態誤差和加快滑模面收斂速度的參數;e為理想側傾角與實際側傾角的偏差。
經過仿真調試,滑模控制器的參數見表1。

表1 滑模控制器參數
電機控制采用三環閉環控制,外環為位置環,以由控制單元根據上層計算得到的反側傾力矩值計算出的電機轉角為控制目標,與由光電編碼器測出電機的實際轉角信號做對比分析,采用PI控制;中間環為轉速環,采用PI控制;內環為電流環,采用電流滯環控制,控制原理見圖9。電機響應特性如圖10所示,系統的上升時間為3.86 ms,超調量為5.95%,調節時間為40.2 ms,穩態誤差為零,即電機執行器控制系統的動態響應特性較好。
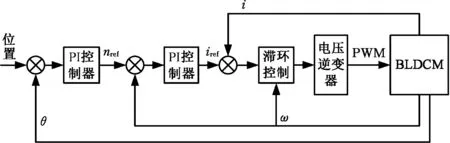
圖9 電機的控制原理圖Fig.9 The control schematic diagram of permanent magnet DC brushless motor
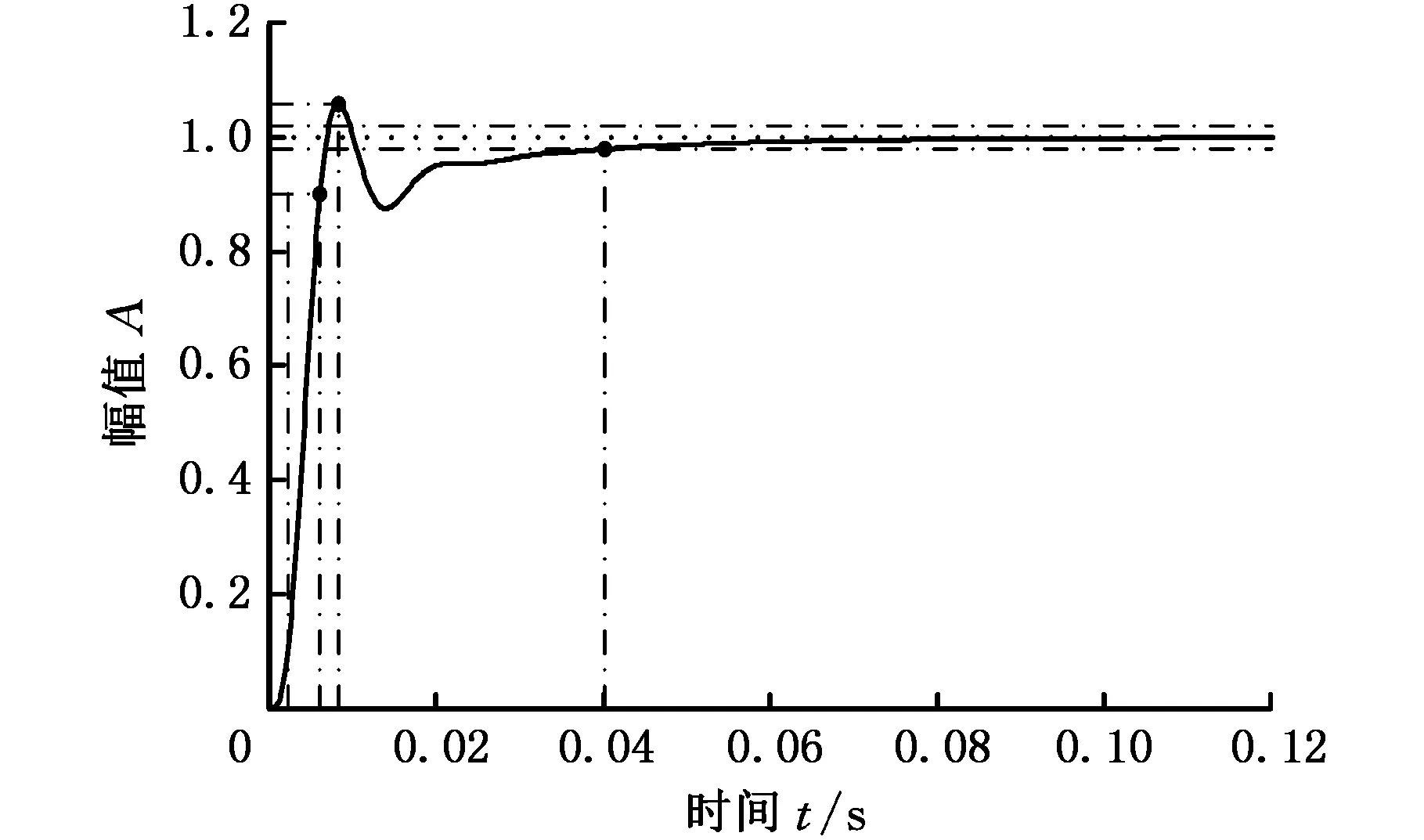
圖10 電機響應特性Fig.10 The characteristic of motor response
3.2.3工作模式三
當ECU檢測到系統發生故障時,為了避免危險事故,保證穩定桿反側傾力矩的輸出,提升車輛的操縱穩定性,系統將選擇工作模式三,即系統處于“鎖定桿”狀態。電機短接制動,即圖7中驅動電路的開關電路上橋全部打開,下橋全部關閉,或者上橋全部關閉,下橋全部打開,電機定子的三相繞組被短接成為閉合回路,此時處于發電狀態的電機相當于電源被短路,電源短路后轉子尚有剩余磁場,而轉子依靠自己的慣性仍在轉動,形成旋轉磁場,轉子的旋轉磁場使定子繞組內產生感應電流,該電流又與轉子的旋轉磁場相互作用迫使轉子迅速停下來。“鎖定桿”狀態使穩定桿以與傳統被動式穩定桿相似的方式進行工作。
4 仿真分析
4.1 仿真實驗設置
為了對比三種工作模式在不同行駛路況下性能,在建立的仿真模型基礎上設置了兩種典型行駛工況,分別在三種工作模式下仿真分析,仿真所用車輛及電機的部分參數見表2。
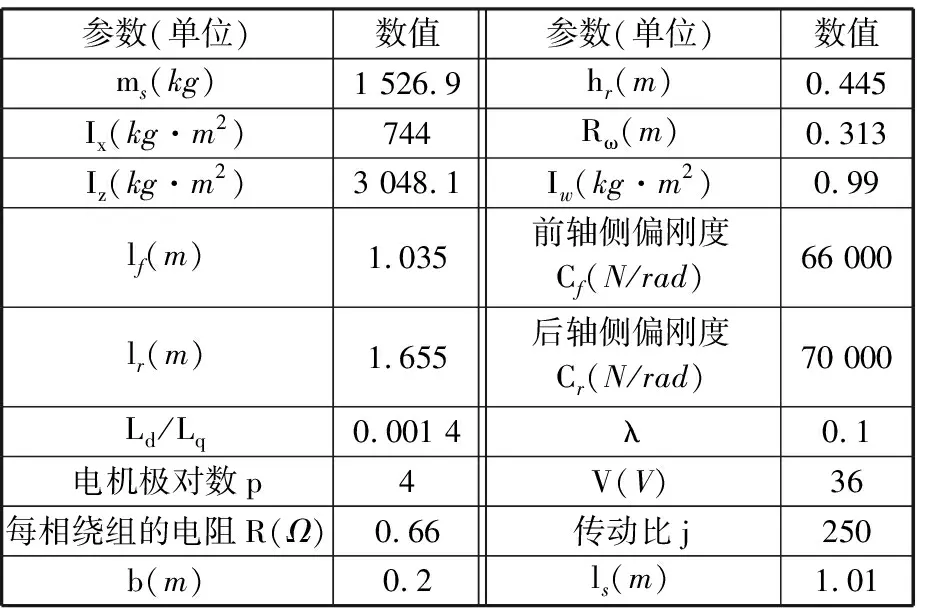
表2 部分車輛及電機參數
結合仿真結果,分別采用側傾角、側傾角速度,側傾角速度的功率譜密度(PSD)以及橫向軸荷轉移率作為評估車輛側傾穩定性和行駛平順性的性能指標。其中,側傾角速度的功率譜密度能夠反映不同頻率范圍內的側傾角振動的功率大小,可用于評價車輛的側傾角振動與行駛的平順性。由于0.3~3 Hz是人體對側傾角振動較為敏感的頻率帶[17],故選擇0.3~3 Hz內的側傾角速度的功率譜密度(power spectral density, PSD )來評估車輛的行駛平順性。橫向軸荷轉移率 (lateral load transfer rate, LTR)定義為[18]
(18)
式中,Fzr、Fzl分別為左右輪胎的總垂向力,橫向軸荷轉移率用于判定車輛側翻程度。
4.2 水平路面上直線行駛
圖11為車輛在C級路面上以80 km/h的速度直線行駛時的響應曲線。從側傾角和側傾角速度曲線對比圖可以得出三種工作模式的情況,側傾角都在-0.8°~0.6°之間,側傾角較小。橫向軸荷轉移率都在-0.4~0.3之間,不存在側翻危險。由圖11d可以看出,0.3~3 Hz范圍內,與“有控制”相比,“電機自由轉動”下側傾角速度的功率譜密度減小了4.2 dB/Hz,有效地削弱了側傾角振動,提高了車輛的行駛平順性。“電機短接制動”下的側傾角速度的功率譜密度最大,行駛平順性最差。
(a)側傾角
(b)側傾角速度

(c)橫向軸荷轉移率
(d) 側傾角速度功率譜密度圖11 C級路面直線行駛的響應曲線Fig.11 The response curve of straight driving on C-level road
4.3 極限轉向工況
為了驗證主動穩定桿在易側翻危險工況下的控制效果,在J型轉向工況下進行仿真分析,車速為80 km/h,C級路面行駛。J型轉向是為了模擬駕駛者遇到障礙物時緊急轉動轉向盤的躲避行為,能模擬車輛側翻的危險,前輪轉角曲線見圖12。

圖12 J型轉向工況下的前輪轉角Fig.12 The front wheel angle of J-turn condition

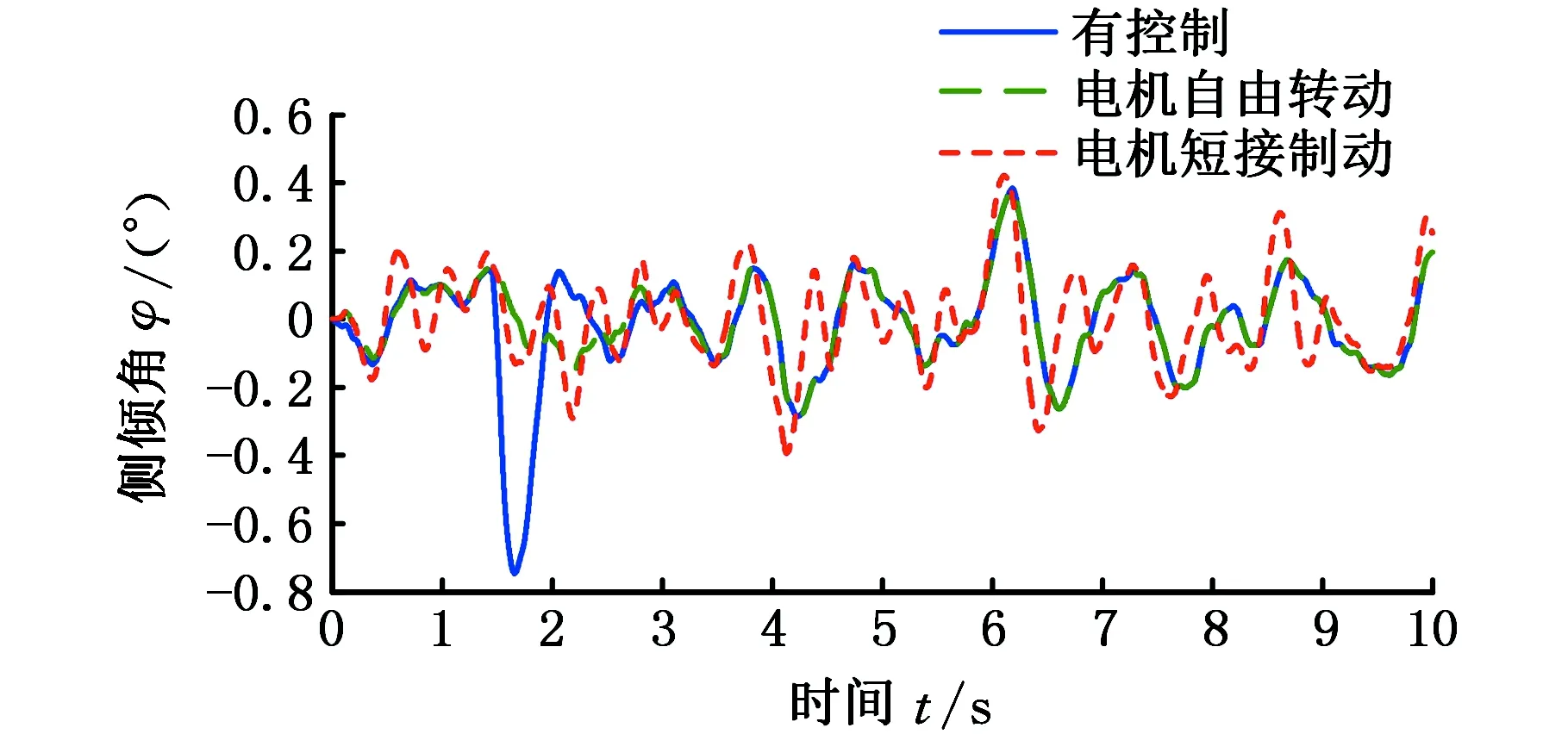
(a)側傾角

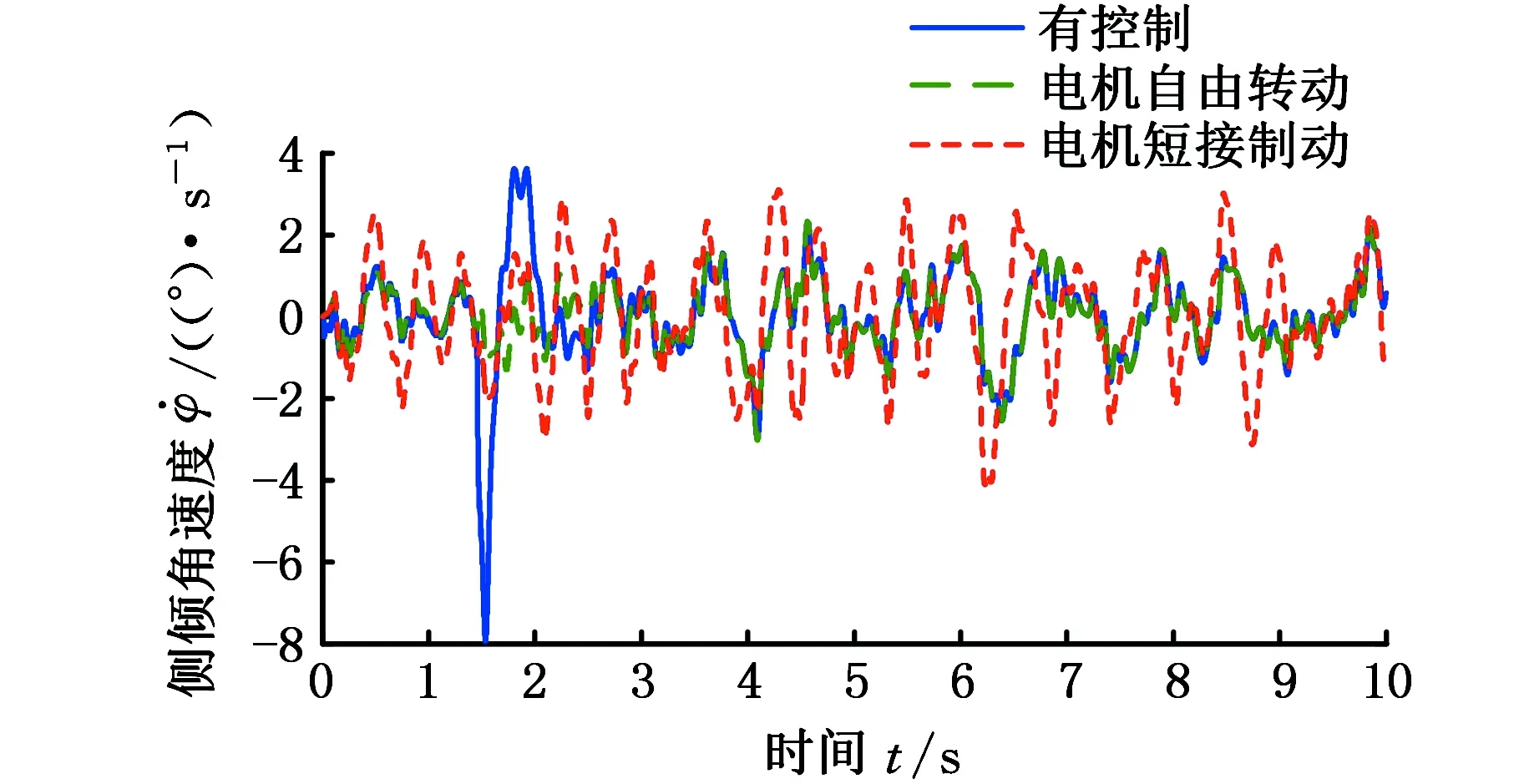
(b)側傾角速度
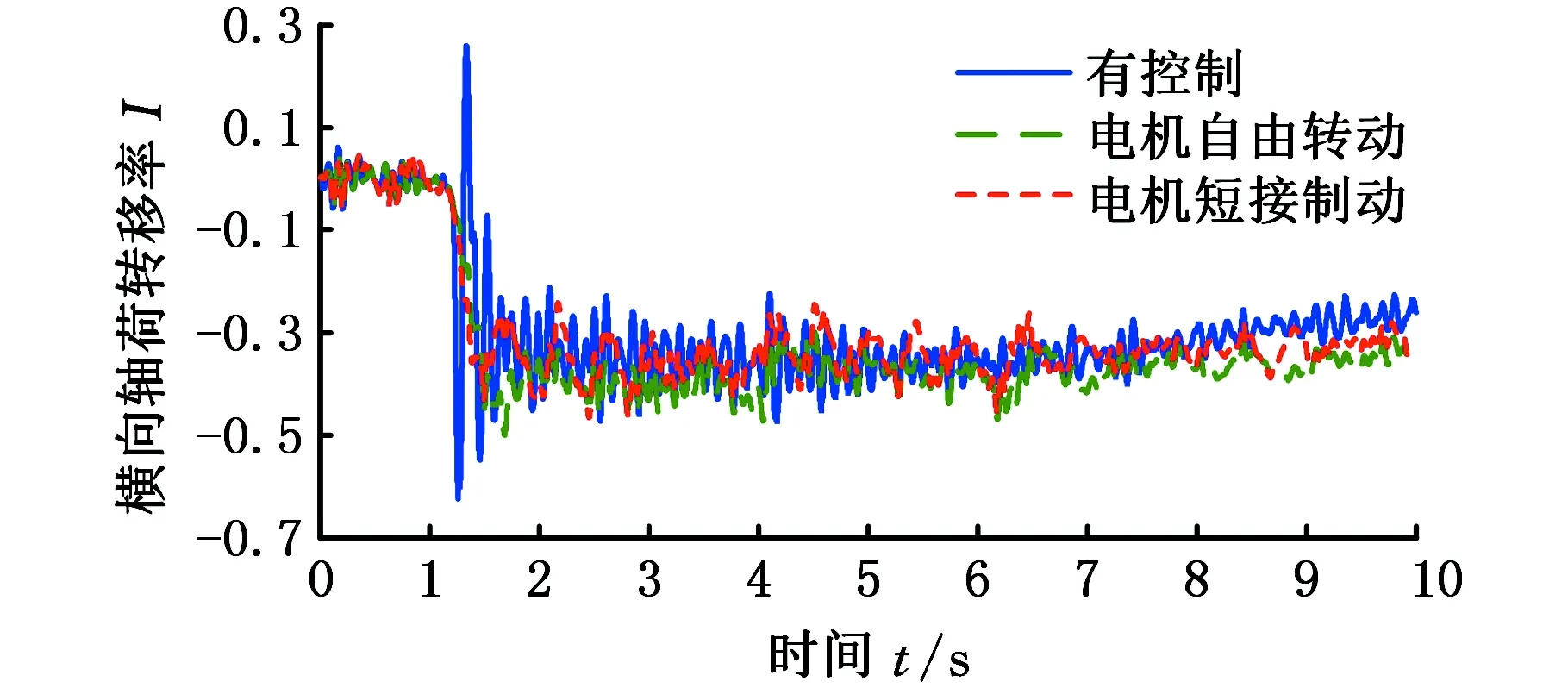
(c)橫向軸荷轉移率

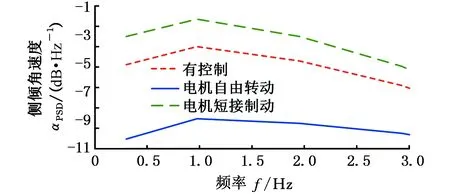
(d) 側傾角速度功率譜密度圖13 C級路面J型轉向行駛的響應曲線Fig.13 The response curve of J-turn driving on C-level road
車輛的側傾響應曲線見圖13。從圖13a中可以看出,與“電機自由轉動”及“電機短接制動”相比,“有控制”的側傾角的實際值能夠實時地跟隨目標值,能夠明顯減小車身的側傾角,使側傾角大小控制在1.2°左右。從圖13b中可以看出,“有控制”能夠顯著減小側傾角速度,提高車輛的側傾穩定性。在J型轉向和正弦轉向工況下,0.3~3 Hz范圍內,與“電機自由轉動”和“電機短接制動”相比,“有控制”下側傾角速度的功率譜密度分別減小了10 dB/Hz和7 dB/Hz,有效地提高了車輛的行駛平順性。
當系統發生故障時,控制系統無法工作,從圖13a可以看出,“電機短接制動”的側傾角在2°左右,明顯小于“電機自由轉動”時的側傾角。為避免危險事故發生,當控制器檢測到系統故障或者接收不到信號時,系統選擇短接制動模式,將穩定桿“鎖止”,保證有反側傾力矩的輸出。
5 結論
(1)當車輛處于水平路面直線行駛時,系統選擇工作模式一,即電機自由轉動,這樣可以提升車輛的行駛平順性。
(2)當車輛處于轉向行駛工況時,選擇工作模式二,即電機式主動穩定桿系統正常工作,能有效減小側傾角與側傾角速度,提高車輛的側傾穩定性與行駛平順性。
(3)當系統發生故障時,選擇工作模式三,即電機短接制動,這樣系統能提供一定的力矩值,避免危險發生。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32